Изобретение относится к самолетному радиоэлектронному оборудованию и предназначено для использования в самолетных грозопеленгаторах-дальномерах (СГПД) и метеорологических РЛС (СМРЛС), обеспечивающих индикацию центров грозовых очагов (гроз).
Грозовая активность и сопутствующие ей молниевые разряды и турбулентность атмосферы создают большую опасность для полетов летательных аппаратов, поэтому грозовые очаги (грозы) обходят сбоку или сверху.
Методика обхода грозовых очагов (гроз) с помощью бокового маневра летательного аппарата (ЛА) основана на требовании не подходить к границе грозового очага (грозы) на расстояние меньше r=15 км [2, с. 263]
Известны СМРЛС ("Гроза", "РСН-2" и др.), позволяющие обнаруживать и индицировать мощные кучевые, кучево-дождевые и грозовые облака [1, с. 129] На индикаторах СМРЛС грозовая зона оконтуривается по определенному уровню сигнала радиоэха, т.е. в соответствии с заданным уровнем отражаемости облака L (напр. L=10 мм6/м3 см) [1, с. 143] Следовательно, метод идентификации грозовой зоны является косвенным по радиолокационной отражаемости облака, которая не жестко связана с молниевой активностью. Эта связь зависит от сезона, типа облаков ("теплые" или "холодные"), интенсивности каплеобразования, лавинообразно нарастающей уже после начала молниевых разрядов. Кроме того, грозовые очаги (грозы) могут экранироваться более близкими кучево-дождевыми облаками, сложное пространственное поле электрических (т.е. молниеопасных) характеристик в грозовых очагах не копирует пространственное распределение их радиолокационной отражаемости. Ливни нельзя уверенно отличить от гроз. Метод практически не пригоден в местах, окруженных горами.
Известно, что при определенных состояниях атмосферы формируются мощные грозовые фронты большой протяженности (до 500 км), представляющие еще большую опасность для полета. Боковой обход с использованием информации от СМРЛС в таких случаях вообще не рекомендуется [5, с. 323] Утверждается [1, с. 143] что метод может стать более эффективным, если принадлежность облака, обнаруженного самолетной метеорологической РЛС (СМРЛС), к грозовому будет установлена с помощью бортового грозопеленгатора.
Известны отечественные наземные грозопеленгаторы-дальномеры [3] и другие. Самолетные грозопеленгаторы-дальномеры (СГПД) широко разрабатываются за рубежом и в качестве прототипа можно использовать штормоскоп LSS-850 [4] который сопряжен с СМРЛС и обеспечивает формирование на ее экране отметок-центров, обнаруженных им грозовых очагов (гроз), наложенных на радиолокационное изображение метеообстановки, формируемое СМРЛС.
Очевидно, что это не меняет способа формирования сигнала грозовой опасности, он по-прежнему основывается на косвенном способе определения грозовой зоны по радиолокационной отражаемости облака, т.е. недостатки метода во многом сохраняются, не обеспечивая безопасности и экономичности полета при обходе грозовых очагов (гроз). Помимо сохраняющейся неопределенности при оконтуривании грозового очага (грозы) по-прежнему не учитывается тот факт, что помимо молниевой опасности грозовая активность сопровождается сильной турбулентностью, простирающейся на окологрозовое пространство и являющейся столь же опасным фактором для полета.
Цель изобретения заключается в обеспечении обозначения на экране индикатора вокруг отметки центра грозового очага (грозы) опасной для полета турбулентно-грозовой зоны (ТГЗ), а в случае грозового фронта обозначение вокруг отметок центров множественных грозовых очагов (гроз) опасной для полета зоны турбулентно-грозового фронта (ТГФ).
Определим турбулентно-грозовую зону (ТГЗ) как область пространства, включающую грозовой очаг (грозу) и окологрозовую зону турбулентности, на границе которой частота сильной и умеренной турбулентности с заданной вероятностью падает до приемлемой для безопасного полета величины (как показано ниже, эта величина составляет 20%).
Определим турбулентно-грозовой фронт (ТГФ) как совокупность турбулентно-грозовых зон с пересекающимися границами, а границу ТГФ определим как непрерывную линию, состоящую из внешних кусков границ пересекающихся турбулентно-грозовых зон, увеличенных в 1,6 раза по сравнению с линейными размерами одиночной ТГЗ (это связано с тем, что частота турбулентностей в ТГФ определяется, как сумма турбулентностей соседних грозовых очагов (гроз) [5, с. 323]
Цель достигается тем, что формируют и индицируют на экране индикатора границы ТГЗ и ТГФ.
Для формирования границы ТГЗ используют определенные с помощью СГПД координаты (дальность и пеленг относительно строительной оси ЛА или его вектора скорости) центра грозового очага (грозы), а также априорные метеорологические статистические параметры некоторых характеристик грозовых очагов (гроз). Известно, что на расстоянии l 36 км от центра грозового очага (грозы) частота сильной и умеренной турбулентности в среднем падает до 20% [1, с. 143] т.е. в пять раз. Известно распределение плотности вероятности протяженности грозовых очагов (гроз), из которого следует, что ее математическое ожидание равно m 32 км ( дисперсия (σгo)2 100 км2), откуда следует, что среднестатистическая ширина окологрозовой зоны турбулентности Δ равняется
Полученная величина хорошо согласуется с величиной расстояния от границы грозового очага (грозы), которого следует придерживаться при обходе грозы (r ≥ 15 км). Сопоставление полученных величин позволяет сделать вывод о том, что рекомендация не подходить к границе грозового очага ближе чем на расстояние r 15 км учитывает окологрозовую турбулентность и приемлемость для полета условий пятикратного падения, частоты сильной и умеренной турбулентности (до 20%). Полученный результат позволяет рассчитать и индицировать на экране СМРЛС границу турбулентно-грозовой зоны, заходить в которую не рекомендуется. Очевидно, что наиболее простой формой границы ТГЗ является окружность радиусом R, имеющая место в случае, когда средне-квадратические ошибки определения дальности до центра грозы (σD) и линейный размер ошибки пеленга (σл) равны и независимы. Радиус R определяем при этом по формуле
Так как величина радиуса рассчитывается с учетом математического ожидания протяженности грозового очага (грозы) m и среднего квадратического отклонения протяженности σго, вероятность полученной по формуле (1) величины радиуса ТГЗ равна 0,84. При использовании в формуле (1) величины случайного отклонения, равной двум сигма, вероятность величины радиуса ТГЗ будет равна 0,98.
В случае, если σD ≠ σл, граница ТГЗ будет иметь форму эллипса, у которого одна ось совпадает с вектором дальности и ее размер определяется по формуле
вторая ось, перпендикулярная первой, определяется по формуле для линейных отклонений
или по формуле для угловых отклонений
а центр эллипса совмещен с измеренными координатами центра грозового очага (грозы).
Технический эффект изобретения заключается в информационно-аппаратурном обеспечении экономичного и безопасного бокового маневра ЛА при обходе ТГЗ и ТГФ, что способствует регулярности полетов, сохранению ресурса и материальной части.
На чертеже представлено иллюстративное изображение ТГФ (с разрывом) на экране индикатора по информации СГПД с использованием способа формирования сигналов грозовой опасности на шкалах 100, 200 и 400 км. Центры грозовых очагов (гроз) изображены точками с зигзагообразными стрелками около них. Рассчитанные при этом размеры ТГЗ при формировании границы ТГФ должны быть увеличены в 1,6 раза в связи с тем, что частота окологрозовой турбулентности в этом случае определяется как сумма турбулентностей соседних грозовых очагов и допустимое при проходе между двумя грозовыми очагами (грозами) расстояние до границы ближайшего из них увеличивают с 15 до 25 км [5, с. 323]
Литература
1. Степаненко В. Д. и др. Радиотехнические методы исследования гроз. Л. Гидрометеоиздат, 1983.
2. Белкин А. М. и др. Воздушная навигация. Справочник. М. Транспорт, 1988.
3. Грозопеленгатор-дальномер "Очаг-2П". Труды ГГО, Л. Гидрометеоиздат, 1988.
4. LSS-Lightning Sensor Sistem. Honeywell Inc. Aircraft Electronics Association, 1989.
5. Черный М. А. и др. Воздушная навигация. Учебник для ССУЗ ГА. М. Транспорт, 1991.
| название | год | авторы | номер документа |
|---|---|---|---|
| БОРТОВОЙ ГРОЗОПЕЛЕНГАТОР-ДАЛЬНОМЕР | 2000 |
|
RU2200963C2 |
| СПОСОБ ОПТИМАЛЬНОГО ОБХОДА ГРОЗЫ | 2005 |
|
RU2316023C2 |
| НАКОПИТЕЛЬ КООРДИНАТ ГРОЗ И ЕГО ВАРИАНТ | 2003 |
|
RU2269792C9 |
| СПОСОБ ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ МОЛНИЕВОГО РАЗРЯДА И МНОГОПУНКТОВАЯ СИСТЕМА ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2003 |
|
RU2253133C2 |
| Способ обеспечения воздушных судов метеорологической информацией | 2017 |
|
RU2672040C2 |
| Грозопеленгатор-дальномер | 1984 |
|
SU1201790A1 |
| СПОСОБ РАДИОТЕХНИЧЕСКОГО ОБНАРУЖЕНИЯ СМЕРЧА | 2005 |
|
RU2339971C2 |
| ИМИТАТОР ЭЛЕКТРОМАГНИТНОГО ПОЛЯ ОЧЕНЬ НИЗКИХ ЧАСТОТ И ЕГО ВАРИАНТ | 2003 |
|
RU2252426C2 |
| КРУГОВОЙ ПЕЛЕНГАТОР (ВАРИАНТЫ) | 2006 |
|
RU2319162C9 |
| СИСТЕМА ИЗМЕРЕНИЙ ПРЕДВЕСТНИКА ЗЕМЛЕТРЯСЕНИЙ | 2008 |
|
RU2383039C1 |
Изобретение предназначено для использования в устройствах предупреждения о грозовой опасности при полете летательного аппарата. Сущность изобретения: в формировании на борту границ турбулентно-грозовой зоны, включающей центр грозового очага (грозы), окологрозовую турбулентную зону с частотой сильной и умеренной турбулентности, падающей к границам зоны до 20% с вероятностью, определяемой вероятностью погрешности, с которой определяются координаты центра грозового очага (грозы), а также в формировании турбулентно-грозовых зон, увеличенных по сравнению с расчетными величинами в 1,6 раза в связи с тем, что частота турбулентности определяется как сумма турбулентностей соседних грозовых очагов (гроз). Это достигается тем, что формируют и индицируют на экране индикатора границы турбулентно-грозовой зоны и турбулентно-грозового фронта. 1 ил.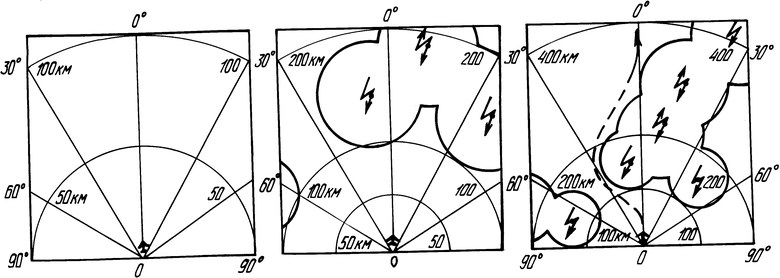
Способ формирования сигналов грозовой опасности, заключающийся в том, что по результатам измерения на борту координат дальности и пеленга молниевых разрядов с помощью самолетного грозопеленгатора-дальномера формируют и индицируют отметку центра грозового очага с координатами дальность (D)-пеленг Φ для обеспечения безопасного и экономичного обхода грозового очага с помощью бокового маневра летательного аппарата, отличающийся тем, что вокруг отметки центра грозового очага обозначают опасную для полета турбулентно-грозовую зону, включающую грозовой очаг и окологрозовую зону сильной и умеренной турбулентности шириной D, причем границу турбулентно-грозовой зоны формируют с учетом априорных статистических метеорологических данных о ширине зоны турбулентности, протяженности грозовых очагов, а именно ее математического ожидания (m) и дисперсии σ
а величину второй оси, перпендикулярной первой, определяют по формуле
для линейных отклонений или
для угловых отклонений, причем точку пересечения осей эллипса совмещают с отметкой центра грозового очага, в случае обнаружения грозового фронта формируют границу турбулентно-грозового фронта как совокупность турбулентно-грозовых зон с пересекающимися границами, причем за границу турбулентно-грозового фронта принимают непрерывную линию, состоящую из внешних кусков пересекающихся турбулентно-грозовых зон, причем ширину окологрозовой турбулентной зоны D вокруг каждого грозового очага, входящего в грозовой фронт, увеличивают в 1,6 раза для учета влияния турбулентности смежных грозовых очагов.
| LSS-Lightning Sensor Sistem., Honeyroetl Inc., Airocraft Electronics Associotion, 1989. |

