Изобретение относится к металлургии, а именно к универсальному устройству для установки в определенное положение приспособлений, используемых в машине для гибких удлиненных элементов, таких как трубы или прокатный профиль.
Известно устройство установки в определенное положение приспособлений, используемых в машине для гибки удлиненных элементов, таких как трубы или прокатный профиль [1] Это устройство содержит по меньшей мере одно основание и опорную платформу для размещения приспособлений, связанную с основанием посредством жестко закрепленного на нем шарнира и смонтированную с возможностью поворота в окружном направлении относительно упомянутого шарнира посредством привода вращательного движения.
Известные устройства разработаны для весьма определенных случаев применения и поэтому обладают тем недостатком, что они не могут быть использованы для гибки элементов, отличающихся от тех, для которых они первоначально предназначены.
Технический результат изобретения заключается в обеспечении универсальности устройства установки в определенное положение различных приспособлений, используемых для гибки удлиненных элементов различной формы при его простоте и легкости в работе.
Этот технический результат достигается тем, что в универсальном устройстве для установки в определенное положение приспособлений, используемых в машине для гибки удлиненных элементов, предпочтительно труб или прокатного профиля, содержащим по меньшей мере одно основание и опорную платформу для размещения приспособлений, связанную с основанием посредством жестко закрепленного на нем шарнира и смонтированную с возможностью поворота в окружном направлении относительно упомянутого шарнира посредством привода вращательного движения, согласно изобретению, дополнительно имеется для одновременного с поворотом привод возвратно-поступательного перемещения платформы в радиальном относительно оси шарнира направлении. Предпочтительно, чтобы основание и опорная платформа были установлена на каретке, размещенной на опорной раме, при этом каретка была снабжена приводом ее возвратно-поступательного перемещения относительно рамы по меньшей мере в одном направлении.
Более предпочтительно, чтобы устройство было снабжено второй кареткой с размещенными на ней основанием и опорной платформой, установленной на опорной раме последовательно за первой кареткой, с приводом возвратно-поступательного перемещения относительно рамы по меньшей мере в одном направлении. возвратно-поступательного перемещения относительно опорной рамы в двух направлениях, предпочтительно перпендикулярных друг другу.
Целесообразно также, чтобы привод возвратно-поступательных перемещений каретки относительно опорной рамы был выполнен в виде соединенной с основанием каретки пластины, жестко связанной с гайкой, смонтированной с возможностью взаимодействия с ходовым винтом, причем первая пластина установлена с возможностью возвратно-поступательного перемещения по второй пластине, жестко соединенной с второй гайкой, смонтированной с возможностью взаимодействия со вторым ходовым винтом, и установленной с возможностью возвратно-поступательного перемещения относительно опорной рамы в направлении, фактически перпендикулярном направлению перемещения первой пластины относительно второй пластины. При этом первая пластина выполнена на обращенной к второй пластине поверхности с парой выступов, входящих в направляющие пазы, выполненные на второй пластине, а вторая пластина выполнена с двумя концевыми направляющими элементами, входящими в направляющие элементы, выполненные на раме.
Предпочтительно, чтобы привод вращательного движения платформы в окружном направлении относительно оси шарнира был выполнен в виде смонтированного с возможностью поворота относительно оси шарнира стола, на котором размещены опорная платформа и гидромотор, на валу которого установлена шестерня, входящая в зацепление с зубчатой рейкой, выполненной дугообразной и размещенной на основании, несущим шарнир.
Целесообразно, чтобы привод возвратно-поступательного перемещения опорной платформы в радиальном направлении относительно оси шарнира был выполнен в виде кулачка, закрепленного на шарнире посредством шпонки с возможностью взаимодействия с роликом толкателя, расположенного под опорной платформой, при этом платформа была смонтирована с возможностью возвратно-поступательного перемещения относительно стола и выполнена на обращенной к столу поверхности с двумя выступами, входящими в направляющие элементы, жестко связанные со столом.
Можно также, чтобы привод возвратно-поступательного перемещения опорной платформы в радиальном направлении относительно оси шарнира был выполнен в виде силового цилиндра, установленного на платформе, свободный конец поршня которого жестко связан со столом, при этом опорная платформа, смонтированная с возможностью возвратно-поступательного перемещения относительно стола, была выполнена на обращенной к столу поверхности с двумя выступами, входящими в направляющие элементы, жестко связанные со столом.
Указанный технический результат достигается также машиной для гибки удлиненных элементов, включающей в себя описанное устройство для установки приспособления в определенное положение.
Перед использованием машины для гибки удлиненных элементов с целью придания им желаемой конфигурации каретки с помощью их приводов обычно устанавливаются в определенное положение по отношению к раме. Затем приспособления, которые требуются для выполнения предлагаемого типа изгиба, располагаются на опорных платформах. После этого посредством соответствующего сочетания поступательного и вращательного движений опорных платформ относительно соответствующих шарниров осуществляется сама гибочная операция.
На практике вращательное движение обеспечивает возможность получения желаемой кривизны, в то время как поступательное движение, которое происходит одновременно с вращательным движением, заставляет криволинейный элемент выходить таким образом, чтобы он повторно не принимал свою первоначальную недеформированную конфигурацию в результате восстановления сил упругости, как только снимается напряжение изгиба.
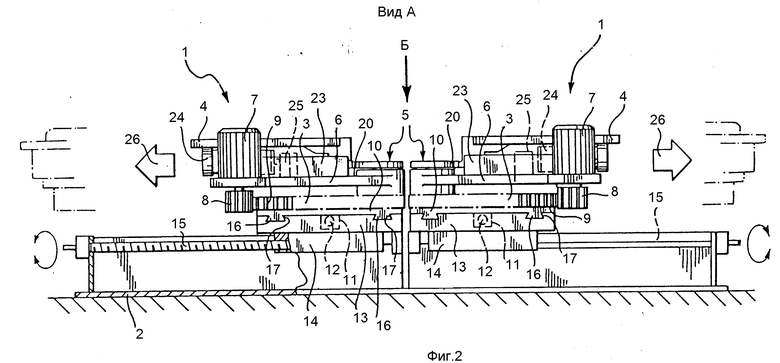
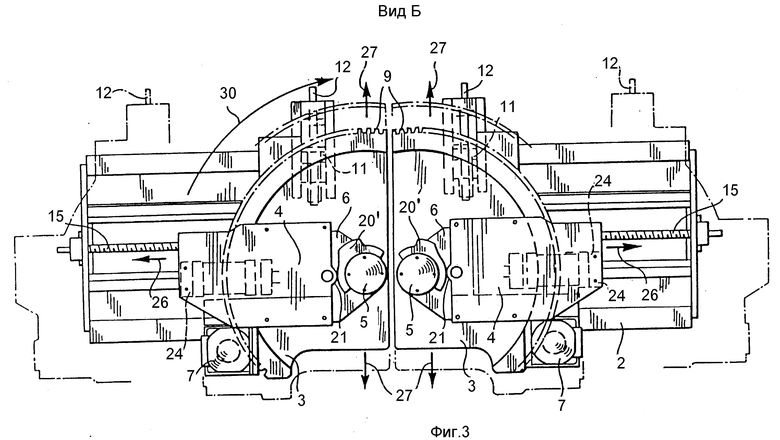
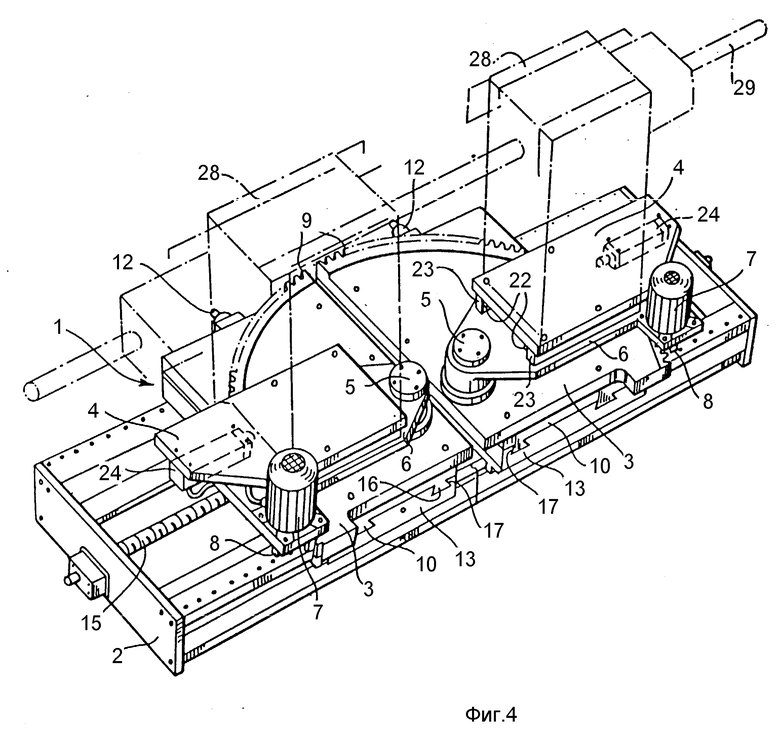
На фиг. 1 изображен вид в перспективе предлагаемого устройства; на фиг. 2 вид по стрелке А на фиг. 1; на фиг. 3 вид по стрелке Б на фиг. 2; на фиг. 4 вид в перспективе предлагаемой машины.
Универсальное устройство для установки в определенное положение приспособлений, используемых в машине для гибки удлиненных элементов, предпочтительно труб или прокатного профиля, показанное на фиг. 1 3, содержит две каретки 1, установленные последовательно на опорной раме 2.
На каждой каретке 1 установлены основание 3 и опорная платформа 4 для размещения указанных приспособлений, связанная с основанием 3 посредством жестко закрепленного на нем шарнира 5 и смонтированная с возможностью поворота в окружном направлении относительно шарнира 5 посредством привода вращательного движения. Этот привод выполнен в виде смонтированного с возможностью поворота относительно оси шарнира 5 стола 6, на котором размещены опорная платформа 4 и гидромотор 7. На валу гидромотора 7 установлена шестерня 8, входящая в зацепление с зубчатой рейкой 9. Зубчатая рейка 9 выполнена дугообразной и размещена на основании 3, несущем шарнир.
Каждая каретка 1 имеет привод ее возвратно-поступательного перемещения относительно опорной рамы 2, выполненный в виде соединенной с основанием каретки 1 пластины 10, жестко связанной с гайкой 11, смонтированной с возможностью взаимодействия с ходовым винтом 12, проходящим поперек рамы 2. Пластина 10 установлена с возможностью возвратно-поступательного перемещения на пластине 13, жестко соединенной с гайкой 14, смонтированной с возможностью взаимодействия с ходовым винтом 15, установленным таким образом, чтобы он располагался вдоль продольной оси рамы 2, т.е. перпендикулярно винту 12.
Пластина 10 выполнена на обращенной к пластине 13 поверхности с парой выступов 16, входящих в направляющие пазы 17, выполненные на пластине 13. Пластина 13 установлена с возможностью возвратно-поступательного перемещения относительно опорной рамы 2, фактически перпендикулярном направлению перемещения пластины 10 относительно пластины 13. Пластина 13 выполнена с двумя концевыми направляющими элементами 18, входящими в направляющие элементы 19, выполненные на раме 2.
Устройство содержит также привод возвратно-поступательного перемещения опорной платформы 4 в радиальном направлении относительно оси шарнира 5, выполненный в виде кулачка 20, закрепленного на шарнире 5 посредством шпонки с возможностью взаимодействия с роликом 21 толкателя, расположенного на опорной платформе 4. Платформа 4 смонтирована с возможностью возвратно-поступательного перемещения относительно стола 6 и выполнена на обращенной к столу 6 поверхности с двумя выступами 22, входящими в направляющие элементы 23, жестко связанные со столом 6.
Привод возвратно-поступательного перемещения опорной платформы 4 в радиальном направлении относительно оси шарнира 5 выполнен также в виде силового цилиндра 24, установленного на платформе 4, свободный конец поршня 25 цилиндра 24 жестко прикреплен к столу 6.
Машина для гибки установленных элементов, показанная на фиг. 4, содержит описанное устройство для установки в определенное положение приспособлений, используемых в этой машине.
Предлагаемое устройство работает следующим образом.
В зависимости от типа удлиненного элемента, который должен быть изогнут, и кривизны, которая должна быть ему придана, основания 3 двух кареток 1 располагаются относительно рамы 2 посредством поступательного движения в двух перпендикулярных направлениях. С этой целью винты 15 поворачиваются и взаимодействуют с гайками 14, которые заставляют пластины 13 перемещаться в продольном направлении, показанном стрелками 26, причем при их перемещении они переносят установленные на них пластины 10.
Поворот винтов 12, которые взаимодействуют с гайками 11, затем приводит к поперечному поступательному движению в направлении, показанном стрелками 27, пластины 10 относительно рамы 2 с установлением определенного положения оснований 3 по отношению к раме 4. Из фиг. 1 4 видно, что направления, показанные стрелками 26 и 27, взаимно перпендикулярны.
В этот момент приспособления 28, которые должны удерживать и зажимать удлиненный элемент 29 в течение самой гибочной операции, известным способом располагаются на опорных пластинах 4 (фиг. 4).
Гибочная операция осуществляется благодаря комбинированному поступательному и вращательному движению платформ 4, которые удерживают приспособления 28 и удлиненные элементы 29 по отношению к шарнирам 5.
Фактически вращение обеспечивает получение желаемой кривизны, в то время как поступательное движение, которое осуществляется одновременно с вращением, заставляет криволинейный элемент 29 выходить таким образом, чтобы он повторно не принимал свою первоначальную недеформированную конфигурацию в результате восстановления действия сил упругости, как только снимаются напряжения изгиба.
Вращение платформ 4 относительно шарниров 5 в направлении, указанном стрелками 30, выполняется гидромоторами 7, которые посредством вращения соответствующих шестерен 8, входящих в зацепление с соответствующими зубчатыми рейками 9, вставляют связанные с ними столы 6, которые несут на себе опорные платформы 4, поворачиваться вокруг шарниров 5.
Радиальное поступательное движение платформ 4 относительно шарниров 5 в направлении стрелок 31 выполняется одновременно с вращением благодаря действию силовых цилиндров 24 или зацеплению, имеющему место между роликами 21 кулачкового толкателя и кулачками 20, закрепленными посредством шпонки на шарнирах 5.
Управление вращательным и поступательным перемещениями и их координация осуществляется управляющим компьютером, который не показан и к которому известным способом подсоединены приводные устройства.
На фиг. 1 3 представлены оба типа приводов возвратно-поступательного перемещения опорной платформы в радиальном направлении относительно оси шарнира 5, устанавливаемые на одной и той же машине. Очевидно, что на практике в зависимости от конкретных требований в отношении применения будет использован только один тип привода. Фактически привод, выполненный из кулачка и ролика кулачкового толкателя, более экономичен, но он требует более длительного приспособления к различным гибочным процессам, в то время как привод с силовым цилиндром, представленный только на фиг. 4, требует больших затрат, но может быть быстрее приспособлен к различным условиям применения.
Возможность многостороннего применения устройства, согласно изобретению, очевидна из того, что описано выше и обусловлено простой регулировкой винтов 12, 15 и гаек 11, 14, регулировкой положения оснований 3 по отношению к раме 2 и возможностью опорной платформы 4 выполнять различные поступательные и вращательные движения относительно шарниров 5, обеспечивая таким образом получение различных форм изгиба.
Естественно, что при сохранении принципа изобретения детали устройства и варианты ее осуществления могут широко меняться по отношению к тому, что описано и проиллюстрировано, без отклонения от объема изобретения.
Например, устройство, согласно изобретению, может включать в себя одну каретку, подвижно установленную на опорной раме. Такое устройство предназначено для гибки удлиненных элементов, которые могут быть зажаты между зажимным устройством, не установленным на устройстве, и приспособлениями, удерживаемыми опорной платформой одной каретки, для придания этим элементам формы, которая не отличается чрезмерной сложностью.
Использование: изобретение относится к обработке материалов давлением и может быть использовано в профилегибочном оборудовании для гибки удлиненных изделий. Сущность изобретения: устройство содержит по меньшей мере одно основание и опорную платформу для размещения приспособлений, связанную с основанием посредством жестко закрепленного на нем шарнира. Платформа смонтирована с возможностью поворота относительно упомянутого шарнира от привода вращательного движения. Платформа снабжена приводом для одновременного с поворотом возвратно-поступательного перемещения ее в радиальном относительно оси шарнира направлении. Рассмотрены варианты установки основания и опорной платформы на каретке, подвижной, в двух, предпочтительно, перпендикулярных направлениях. Рассмотрен вариант выполнения приводов возвратно-поступательного перемещения каретки, а также платформы и вращательного движения платформы. 2 с. и 8 з.п. ф-лы, 4 ил.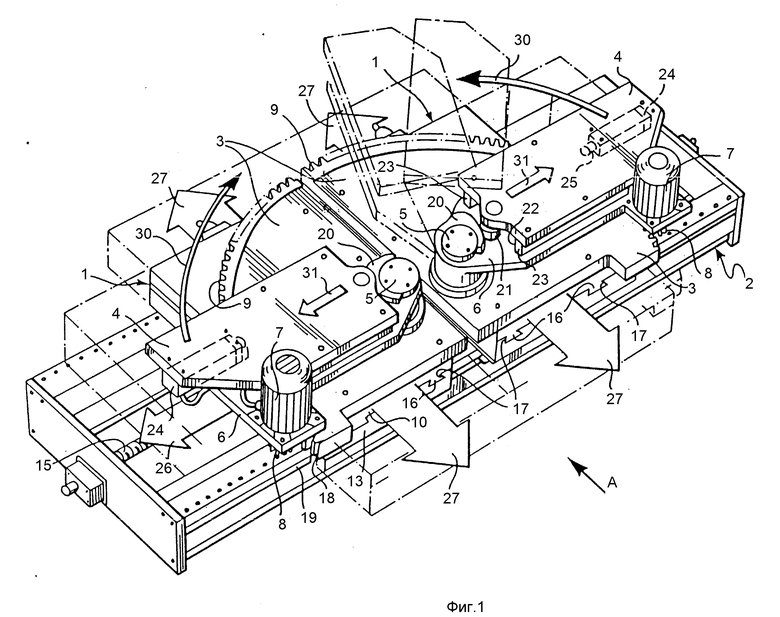
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| US, патент, 2884987, кл | |||
| Термосно-паровая кухня | 1921 |
|
SU72A1 |

