Изобретение относится к авиационной технике, в частности, к средствам аварийного покидания самолетов (САПС) и может быть использовано при разработке перспективных образцов САПС маневренных типов самолетов тактической авиации.
Известно катапультное кресло, в котором используется сложный сервомеханизм управления с гидроприводом, управляющим соплом маршевого ускорителя в процессе катапультирования, а также инфракрасный построитель вертикали /1/.
Ближайшим аналогом является катапультное кресло, содержащее маршевый двигатель, управляющие пороховые ракетные двигатели с ориентированными относительно центра масс кресла соплами, боковые панели, систему управления, связанную электрически с датчиком угла крена /2/.
Недостатком известных устройств является невозможность обеспечения безопасного покидания летательного аппарата.
Целью изобретеня является повышение безопасности процесса покидания летательного аппарата путем снижения минимальной высоты безопасного катапультирования.
Цель достигается тем, что катапультное кресло, содержащее маршевый двигатель, управляющие пороховые ракетные двигатели с ориентированными относительно центра масс кресла соплами, боковые панели, систему управления, связанную электрически с датчиком угла крена, снабжено датчиками скорости и положения кресла, датчиками давления пороховых газов в управляющих двигателях, связанных с системой управления, а управляющие двигатели снабжены приводами и закреплены на боковых панелях с возможностью разворота относительно своей продольной оси, при этом привод электрически связан с системой управления.
Кроме того, в катапультном кресле продольные оси управляющих двигателей расположены под углом 10-20o относительно продольной оси кресла.
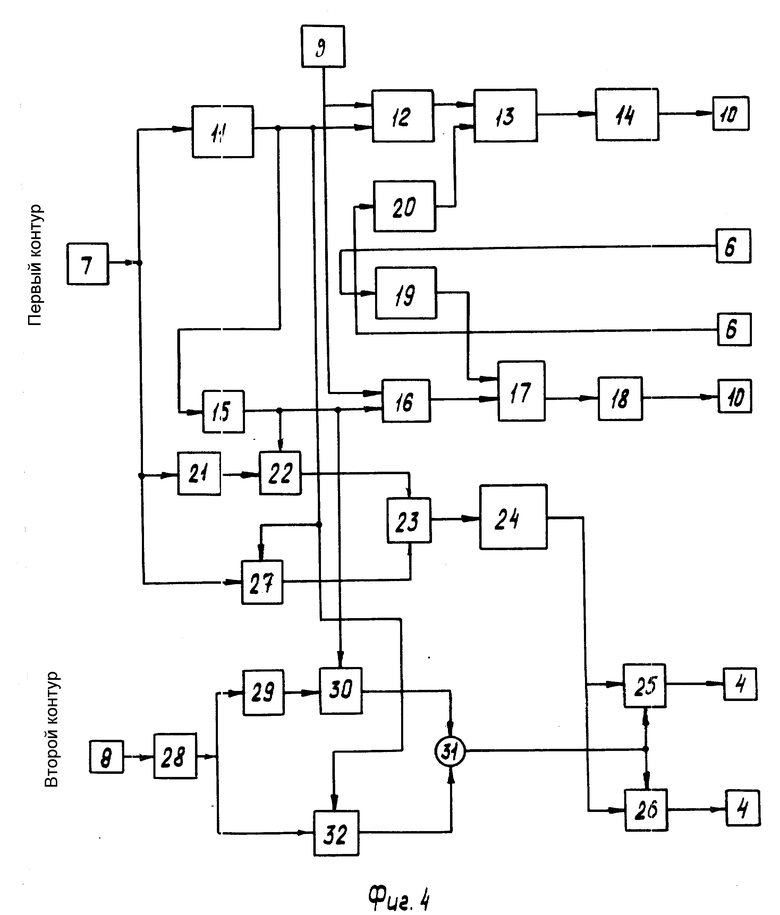
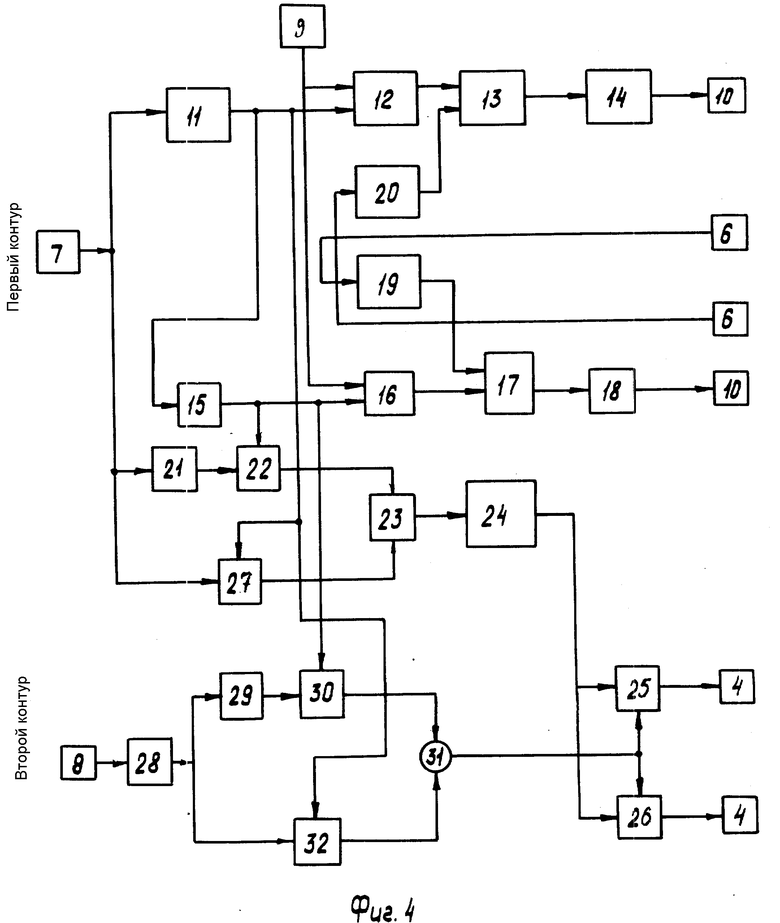
Кроме того, в катапультном кресле система управления выполнена двухконтурной, в первом из которых выход датчика угла крена соединен через пороговый элемент и первые входы и выходы первой цепочки логических элементов И, ИЛИ с первым входом преобразователя логического сигнала в электрический импульс, первый выход которого электрически связан с правым управляющим двигателем, выход порогового элемента параллельно соединен через первые входы и выходы второй цепочки логических элементов НЕ, И, ИЛИ, со вторым входом преобразователя логического сигнала в электрический импульс, второй выход которого электрически связан с левым управляющим двигателем, вторые входы элементов ИЛИ соединены с выходами датчиков давления левого и правого управляющих двигателей, во втором контуре выход датчика угла крена связан через последовательно соединенные первый инвертор, первый ключ, первый сумматор, вычислитель с входами второго и третьего сумматоров, выходы которых соединены с приводами, выход первого инвертора параллельно соединен через второй ключ со вторым входом первого сумматора, выход датчика скорости соединен через делитель напряжения, цепочки последовательно соединенных между собой второго инвертора, третьего ключа, четвертого сумматора с общим входом второго и третьего сумматоров, вход второго инвертора через четвертый ключ соединен со вторым входом четвертого сумматора, выход порогового элемента соединен со вторыми входами второго и четвертого ключей, выход логического элемента НЕ соединен со вторым входом первого и третьего ключей.
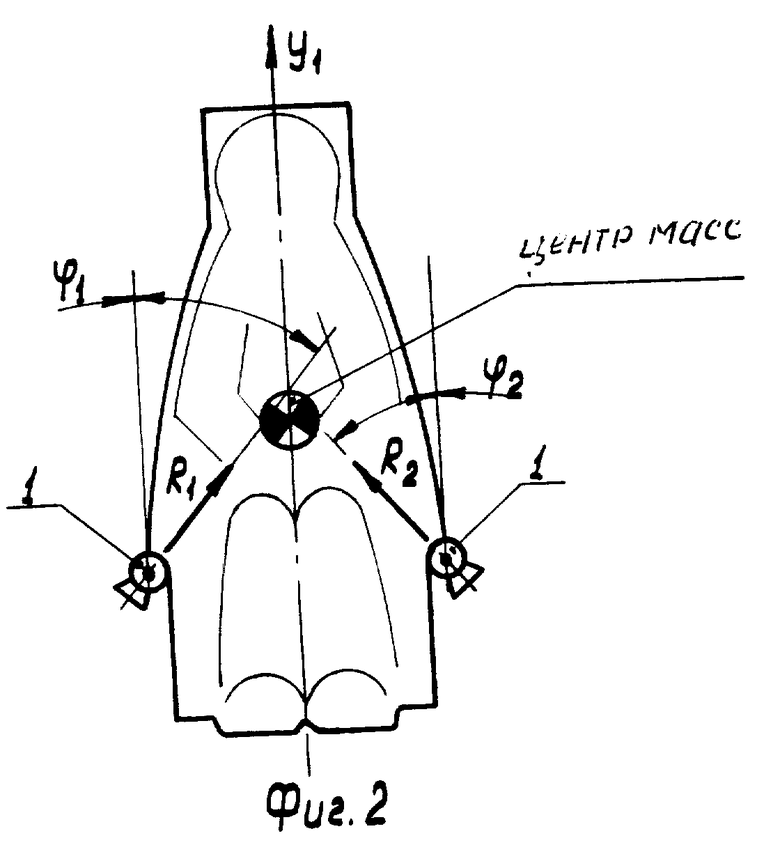
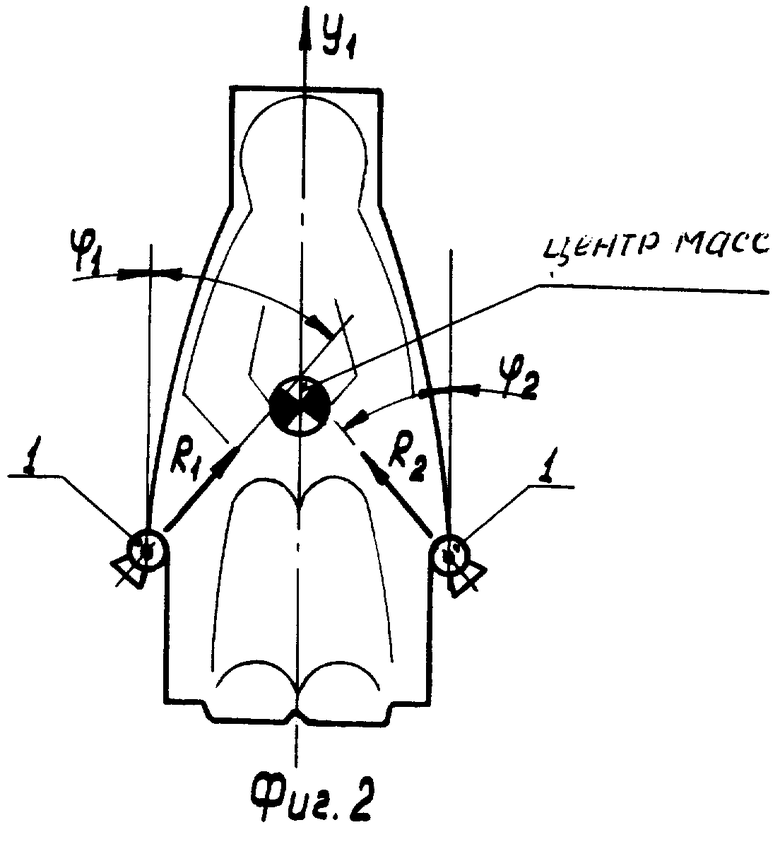
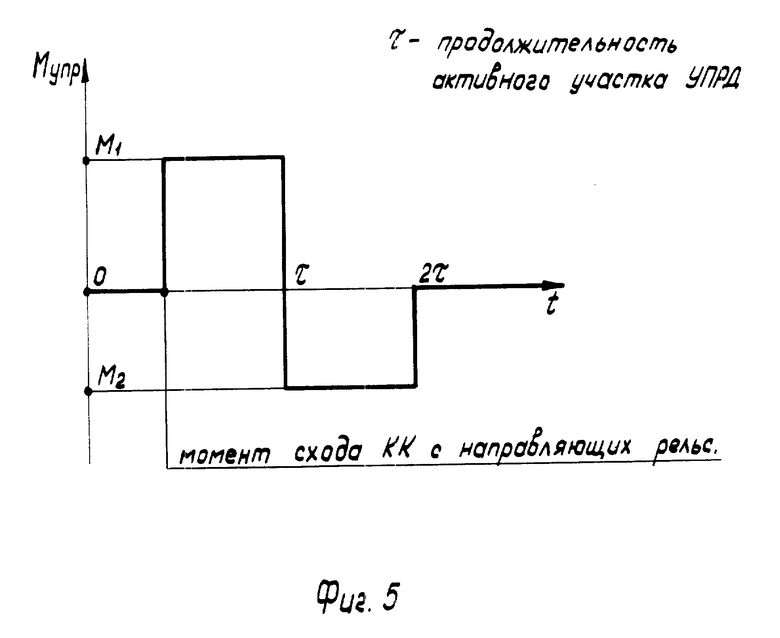
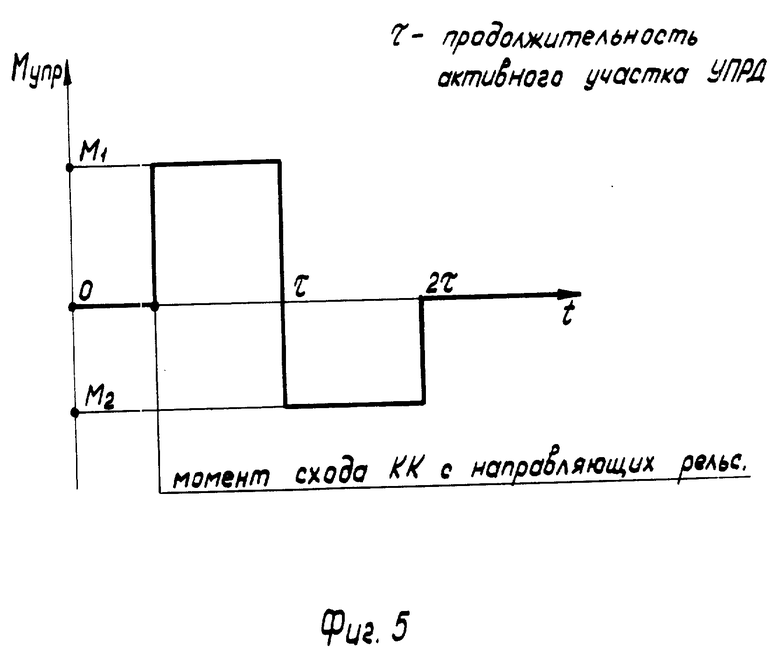
На фиг. 1 изображен вид сбоку на катапультное кресло; на фиг. 2 вид спереди на катапультное кресло; на фиг. 3 блок-схема управления траекторией полета катапультируемого кресла; на фиг. 4 структурная схема блока автоматики (БА); на фиг. 5 закон управления траекторией катапультирования.
Катапультное кресло содержит управляющие пороховые ракетные двигатели (УПРД) 1, установленные по боковым панелям кресла 2, маршевый ускоритель 3, привод 4, связанный с УПРД 1 и 2, блок автоматического управления 5, связанный с двумя датчиками давления пороховых газов 6, датчиком угла крена самолета 7, датчиком скорости самолета 8, датчиком движения кресла 9 и пирозапалами 10. Блок автоматического управления 5 состоит из первого контура, содержащего схему из логических элементов, соединенных последовательно, порогового элемента 11, И 12, ИЛИ 13, ППЗ 14, выход которого связан с пирозапалом правого двигателя 10, выход элемента 11 также связан со второй цепочкой последовательно соединенных элементов НЕ 15, И 16, ИЛИ 17, ППЗ 18, выход которого связан с пирозапалом правого двигателя 10, второй вход элементов 12, 16 соединен с выходом датчика движения 9, второй вход элементов 13, 17 через ПДД левого двигателя 19 и двигателя 20 давлений левого и правого двигателей 6, второй контур содержит первый инвертор 21, последовательно соединенный с первым ключом 22, первым сумматором 23, вычислителем 24, с входами второго и третьего сумматоров 25, 26, соединенных со входами приводов левого и правого двигателей 4, вход инвертора 21 соединен с выходом датчика угла крена 7, со вторым ключом 27 и со вторым входом первого сумматора 23. Датчик скорости 8 через делитель напряжения 28 соединен со вторым инвертором 29, третьим ключом 30, четвертым сумматором 31 и общим входом сумматоров 25, 26, параллельно четвертый ключ 32 присоединен к входам 29, 31, выход элемента 11 соединен со вторыми входами ключей 27, 32, выход элемента НЕ 15 соединен со вторыми входами ключей 22, 30.
Работа устройства происходит следующим образом.
Блок автоматики 5 по значениям γo и скорости самолета предварительно вычисляет значения углов между осью кресла OYк и P направлением оси сопла каждого из управляющих двигателей (углы разворота УПРД). Электрические величины с помощью проводных механизмов поворота 4 преобразуются в угловые перемещения, после чего оба УПРД фиксируются. Сигнал угла крена самолета, абсолютное значение которого получают на сумматоре 23, а затем определяют суммарный угол установки ϕo по алгоритму ϕo = K3 + K1(γo) в вычислителе 24, где К3 определено из условия нулевого момента крена от правого и левого двигателей и представляет собой угол установки двигателей при γ 0. Например, vo 30o, с точки установки сопел двигателей направление вектора тяги проходит через центр масс кресла; К1 0,2-0,4 определяет величину угла установки двигателей при наличии ненулевого начального угла крена.
Сигнал скорости самолета от датчика 8 проходит через цепочку элементов: делитель напряжения 28, инвертор 29, ключ 30, сумматор 31, соединенный с общим входом в сумматоры 25, 26. Этот сигнал алгебраически суммируется с ϕo
При этом углы ориентации сопел УПРД относительно центра масс систем "кресло летчик" равны: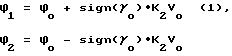
где К2 0-0,1 определен из условий корректировки угла установки УПРД в зависимости от скорости полета перед катапультированием.
Сигналы о крене и скорости самолета поступают от датчиков на входы блока автоматического управления 5, формирующего с помощью логических схем сигналы, которые затем преобразуются в электрические в блоках 14, 18 и передаются на приводные механизмы, преобразуясь в угловые перемещения сопел двигателей симметрично относительно оси OY1. Сигнал по крену через цепочку, состоящую из элементов инвертора 21, ключа 22, сумматора 23 поступает на вычислитель 24, формирующий сигнал ϕo = K3 + K1(γo) и передают на сумматоры 25, 26, связанные с приводами левого и правого двигателей. Сигнал по скорости 8 проходит через цепочку, состоящую из элементов: делитель напряжения 28, инвертор 29, ключ 30, сумматор 31, соединенный с общим входом в сумматоры 25, 26. Если γo > 0, то ключи 22 и 30 закрыты, а ключи 27, 32 открыты, и если γ < 0, то ключи 22 и 30 открыты, а ключи 27, 32 закрыты, поэтому в сумматоре 23 формируется абсолютное значение сигнала по углу крена, в сумматоре 31 формируется сигнал с абсолютным значением, равным К, знак которого зависит от знака угла крена.
Одновременно пороговый элемент, на который поступает сигнал о крене, настроен таким образом, что при go > 0 на выходе элемента появится 1, при γo < 0 на выходе 0. Если на выходе 11 0, то на выходе элемента НЕ 1. В момент катапультирования при сходе кресла с рельсов сигнал о движении кресла поступает на логические элементы И 12, 16. При совпадении единичных сигналов на элементах 12 или 16 срабатывает первая или вторая логические цепочки: так, если γo > 0, то срабатывает первая цепочка 12, 13, 14, если γo < 0, то срабатывает вторая цепочка 16, 17, 18. После этого сигнал в блоках 14 и 18 преобразуется в электрический и поступает на соответствующий вход к пирозапалу левого или правого двигателей. Если γo > 0, то сигнал пройдет вначале к пирозапалу правого двигателя. После окончания его работы по сигналу установленного в нем датчика давления 6 по факту падения давления включается другой управляющий двигатель, парирующий к концу своей работы вращение кресла, по крену. Сигнал через преобразователь ППД 19 поступит на 17, 18, преобразуясь в электрический, поступит на пирозапал левого двигателя 10.
В результате к концу этапа управления управляющие двигатели обеспечивают разворот кресла на угол γ≈0 и значительно снижают Hмин.без.
Таким образом, при покидании самолета при больших начальных углах крена осуществляется управление траекторией кресла за счет разворота кресла по крену от начального значения в положение g ≃ 0 при котором обеспечивается ориентация тяги ПРД в верхнюю полусферу на увеличение высоты траектории. При этом ввиду ограниченности длительности работы порохового двигателя время разворота кресла должно быть минимально возможным. Оптимальный по быстродействию закон управляемого разворота может быть реализован за счет кусочно-постоянных по времени управляющих моментов Мупр. (τ). Указанный закон представляет собой последовательность действия двух знакопеременных моментов на катапультном кресле Мупр1 (t) и Мупр2 (t) см. фиг. 5.
За счет соответствующего выбора этих моментов можно достичь удовлетворения следующих граничных условий:
где γ(0), ωx(0) начальные значения угла крена и угловой скорости в момент катапультирования;
γ(τупр), ωx(τупр) значения этих параметров к концу управления,
т. е. обеспечен требуемый разворот кресла в положение γ ≃ 0 ωx ≃ 0 при любых произвольно заданных начальных значениях γ ≃ (0) и ωx ≃ (0) при катапультировании.
Управляющие моменты Мупр1,2 (τ) могут создаваться за счет дополнительно устанавливаемых на кресло управляющих пороховых ракетных двигателей.

Использование: в авиационной технике при разработке перспективных образцов средств аварийного покидания, маневренных типов самолетов тактической авиации. Сущность: катапультное кресло содержит маршевый ускоритель, управляющие пороховые ракетные двигатели с ориентированными относительно центра масс кресла соплами, систему управления, связанную электрически с датчиком угла крена 7, при этом оно снабжено датчиками скорости 8 и положения кресла 9, датчиками давления пороховых газов 6 в управляющих двигателях, связанных с системой управления 5. Управляющие двигатели снабжены приводами 4 и закреплены на боковых панелях с возможностью разворота относительно своей продольной оси, при этом привод электрически связан с системой управления, которая выполнена двухконтурной, в первом из которых выход датчика угла крена 7 соединен через пороговый элемент и первые входы и выходы первой цепочки логических элементов И, ИЛИ с первым входом преобразователя логического сигнала в электрический импульс, первый выход которого электрически связан с первым управляющим двигателем. Выход порогового элемента параллельно соединен через первые входы и выходы второй цепочки логических элементов НЕ, И, ИЛИ со вторым входом преобразователя логического сигнала в электрический импульс, второй выход которого электрически связан с левым управляющим двигателем. Во втором контуре выход датчика угла крена 7 связан через последовательно соединенные первый инвертор, первый ключ, первый сумматор, вычислитель с входами второго и третьего сумматоров, выходы которых соединены с приводами. 2 з.п.ф-лы, 5 ил.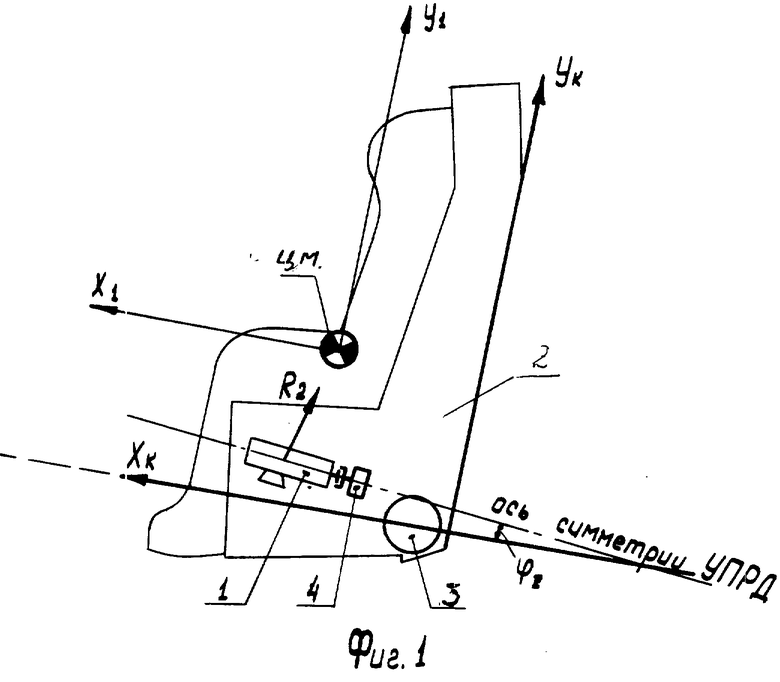
| US, патент, 4303212, кл | |||
| Нагревательный прибор для центрального отопления | 1920 |
|
SU244A1 |
| US, патент, 3648955, кл | |||
| Нагревательный прибор для центрального отопления | 1920 |
|
SU244A1 |
