Изобретение относится в области приборостроения, в частности к системам управления летательными аппаратами при посадке на наклонное, подвижное и колеблющееся основание (авианосец).
Известны системы управления высотой полета, описания которых приведены в книгах Михалева И.А. и др. "Системы автоматического управления самолетами", Москва, Машиностроение, 1971 г. с. 255; Загайнова Г.И. Гуськова Ю.П. "Управление полетом самолетов", Москва, Машиностроение, 1981 г. с. 161. Последняя система, структурная схема которой приведена на фиг. 1, принимается в качестве прототипа. Система содержит задатчик высоты (ЗВ), блок разности (БР), контур стабилизации (КС), блок информационных датчиков (БИД).
Сигнал заданной высоты Hз с выхода ЗВ поступает на первый вход БР, на второй вход которого поступает сигнал относительной высоты Hо с выхода БИД. В качестве измерителя относительной высоты Hо используется, например, радиовысотомер.
В БР формируется сигнал управления Hу (Hз-Hо)K, поступающий в КС, имеющего передаточную функцию  где R=1+a1p+.+an Pn, K, K1 коэффициенты передачи, p оператор дифференцирования; ai коэффициенты, обеспечивающие качество регулирования в КС,
где R=1+a1p+.+an Pn, K, K1 коэффициенты передачи, p оператор дифференцирования; ai коэффициенты, обеспечивающие качество регулирования в КС,  вертикальная скорость полета, Ha - абсолютная высота полета.
вертикальная скорость полета, Ha - абсолютная высота полета.
При посадке на подвижную и колеблющуюся палубу авианосца вертикальная скорость самолета относительно посадочной плоскости имеет вид:
где vс горизонтальная составляющая скорости полета самолета,
Vн горизонтальная составляющая скорости авианосца, θн угол наклона посадочной плоскости, r расстояние до центра вращения,  угловая скорость вращения палубы.
угловая скорость вращения палубы.
Так как  то и в замкнутом контуре управления высотой будет иметь движение по относительной высоте:
то и в замкнутом контуре управления высотой будет иметь движение по относительной высоте:
Здесь коэффициенты bi выбираются из условия обеспечения качества регулирования.
Из уравнения движения следует, что при изменениях Hн и rθн имеют место погрешности по высоте и относительной вертикальной скорости:
что при 0,
0,  60 м/сек, θн2o, r=60 м,
60 м/сек, θн2o, r=60 м,  2o/сек, b1=1 сек составляет δHо4 м,
2o/сек, b1=1 сек составляет δHо4 м,  4 м/сек.
4 м/сек.
Наличие этих погрешностей является недостатком прототипа, так как существенно уменьшаются показатели безопасности при посадке.
Техническим результатом, достигаемым при использовании предлагаемого технического решения, является повышение точности работы системы и соответственно повышение безопасности посадки на подвижное колеблющееся основание (авианосец).
Достигается этот результат тем, что в систему, содержащую задатчик высоты, первый блок разности, контур стабилизации, блок информационных датчиков, причем выход задатчика высоты подключен к первому входу первого блока разности, выход которого подключен к входу контура стабилизации, дополнительно введены блок формирования относительной высоты и блок формирования сигнала коррекции, причем первый, второй и третий выходы блока информационных датчиков подключены соответственно к первому, второму и третьему входам блока формирования относительной высоты, выход которого подключен ко второму входу первого блока разности и к первому входу блока формирования сигнала коррекции, на второй вход которого подключен четвертый выход блока информационных датчиков, а выход блока формирования сигнала коррекции подключен к третьему входу первого блока разности.
Высота полета относительно плоскости посадки определяется в блоке формирования относительной высоты, выполненном на преобразователе координат, блоке умножения, втором блоке разности, блоке извлечения корня квадратного и блоке деления, выход которого подключен к выходу блока формирования относительной высоты, первый и второй входы которого подключены соответственно к первому и второму входу блока умножения, на третий и четвертый входы которого подключены соответственно первый и второй выходы преобразователя координат, на первый и второй входы которого подключены соответственно второй и третий входы блока формирования относительной высоты; причем первый, второй и третий выходы блока умножения подключены соответственно к первому, второму и третьему входам второго блока разности, выход которого подключен ко входу блока извлечения корня квадратного, выход которого подключен к первому входу блока деления, на второй вход которого подключен четвертый выход блока умножения.
Сигнал, компенсирующий влияние наклона и движения посадочной плоскости, формируется в блоке формирования сигнала коррекции, выполненном на блоке суммирования, блоке интерполяции, блоке запаздывания, третьем блоке разности, выход которого подключен к первому входу блока интерполяции и ко входу блока запаздывания, первый n-ый выходы которого подключены соответственно ко второму,(n+1)-му входам блока интерполяции, первый, m-ый выходы которого подключены соответственно к первому, m-му входам блока формирования сигнала коррекции, первый и второй входы которого подключены соответственно к первому и второму входам третьего блока разности.
На фиг. 1 представлена блок-схема прототипа, обозначения блоков приведено выше.
На фиг. 2 представлено геометрическое расположение летательного аппарата относительно посадочной плоскости, здесь обозначено:
BO; BO1 горизонтальные линии, CC1 продольная строительная ось летательного аппарата, θс угол тангажа летательного аппарата, O2Ak линия посадки (палуба авианосца), θн угол наклона палубы, OO1⊥B1O1Hо = OO2⊥O2Aк, OA1 D1 наклонная дальность, измеряемая первым измерителем дальности под углом визирования ϕ1 относительно строительной оси OC1, OAk=Dk наклонная дальность, измеряемая K-ым измерителем под углом визирования ϕк относительно строительной оси OC1. При этом относительная высота Hо=OO2 по параметрам D1, Dk, ϕ = ϕ1 - ϕк определяется зависимостью
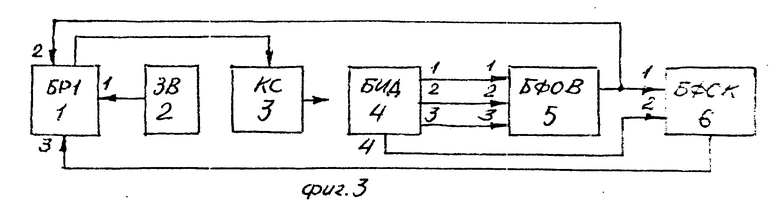
На фиг. 3 представлена блок-схема предлагаемой системы, содержащей:
1 первый блок разности БР1, 2 задатчик высоты ЗВ, 3 контур стабилизации КС, 4 блок информационных датчиков БИД, 5 блок формирования относительной высоты БФОВ, 6 блок формирования сигнала коррекции БФСК.
На фиг. 4 представлена блок-схема БФОВ 5,содержащего:
7 преобразователь координат ПК, 8 блок умножения БУ, 9 второй блок разности БР 2, 10 блок извлечения корня квадратного БИКК, 11 блок деления БД.
На фиг. 5 представлена блок-схема БФСК6, содержащего: 12 третий блок разности БРЗ, 13 блок запаздывания БЗ, 14 блок интерполяции БИ, 15 блок суммирования БС.
Система работает следующим образом.
С выхода ЗВ 2 сигнал заданной высоты Hз поступает на вход БР1 (1), на второй и третий входы которого поступают соответственно сигналы относительной высоты Hо с выхода БФОВ5 и сигнала коррекции F с выхода БФСК6. В БР1 1(1) формируется сигнал управления Hу=(Hз+F-Hо)K, поступающего на вход КСЗ, имеющего передаточную функцию 
Как было показано выше при Hар = (Hо + Hн + rθн)р, R=1+a1p+.anpn в замкнутом контуре управления будет иметь место движения по высоте
В диапазоне времени T≤0,1 Tн, здесь Tн период частоты колебаний палубы авианосца функцию (Hн + rθн) можно представить в виде временного ряда степени m=n+1
(Hн + rθн) = f = Cо + C1t + C2t2 + Cмtм,
тогда HoQ=Hз -fP (b1+b2P+.+bmRn)+F.
БИД4 содержит датчик абсолютной высоты Hа и датчики наклонной дальности, измеряющие (см. фиг. 2) дальность D1=OA1 с углом визирования ϕ1 и дальность Dk с углом визирования ϕк В качестве датчиков D1, Dk могут использоваться многолучевой разновысотомер соответственно с углами наклонов ϕ1, ϕк; радиолокационный датчик или оптиколокационный датчик, а в качестве датчиков абсолютной высоты используется, например, барометрический датчик.
С первого, второго и третьего выходов БИД4 сигналы D1, Dk, ϕ = ϕ1 - ϕк поступают соответственно на первый, второй и третий входы БФОВ5. В БФОВ5 первый вход (сигнал D1) подключен к первому входу БУ8, на второй вход которого подключен сигнал Dk со второго входа БФОВ5, подключенного также к первому входу ПК 7, на второй вход которого подключен сигнал ϕ с третьего входа БФОВ5. В ПК 7 формируются сигналы Dкsinϕ и Dкcosϕ которые с первого и второго выходов ПК 7 поступают соответственно на третий и четвертый БУ8. БУ8 реализован на четырех элементах умножения, на которых формируются сигналы D поступающий на первый вход БД 11, на второй вход которого поступает сигнал D1Dкsinϕ с четвертого выхода БУ 8.
поступающий на первый вход БД 11, на второй вход которого поступает сигнал D1Dкsinϕ с четвертого выхода БУ 8.
В БД 11 формируется, реализующий зависимость (1), сигнал  поступающий на вход БФОВ 5. С выхода БФОВ 5 сигнал Hо поступает на второй вход БР1 (1) и на первый вход БФСК 6, на второй вход которого поступает сигнал Hа с четвертого выхода БИД 4. В БФСК 6 (см. фиг. 5) первый и второй входы подключены соответственно к первому и второму входам БРЗ (12), где формируется сигнал
поступающий на вход БФОВ 5. С выхода БФОВ 5 сигнал Hо поступает на второй вход БР1 (1) и на первый вход БФСК 6, на второй вход которого поступает сигнал Hа с четвертого выхода БИД 4. В БФСК 6 (см. фиг. 5) первый и второй входы подключены соответственно к первому и второму входам БРЗ (12), где формируется сигнал
(Hа - Hо) = Hн + rθн + C = f + C = fо
(здесь C постоянная величина), поступающий на первый вход БИ 14 и на вход БЗ 13. БЗ 13 реализован на "n" элементах запаздывания, на которых формируются сигналы
f1 = fо(t-τ1), f2 = fо(t-τ2), ..., fn = fо(t-τn)
(здесь τ1, ..., τn постоянные времени запаздывания, при этом τ1 + τ2 + ... τn ≤ T ≤ 0,1Tн которые с первого n-го выходов БЗ 13 поступают на второй, (n+1)-ый входы БИ 14.
По поступившим сигналам f0, f1, fn при известных τ1, ..., τn на временном интервале T = τ1 + ... + τn в БИ 14 по стандартным арифметическим процедурам (см. "Справочник по математике" И.Н.Бронштейн, К.А.Семендяев, г. Москва, Наука, 1986 г. с. 502) формируются коэффициенты C1, C2, Cm интерполяционного многочлена
f0=C+C0 + C1t+c2t2+.+Cmtm.
Сигналы коэффициентов C1, C2, Cm с первого, m-го выходов БИ 14 поступают на первый, m-ый входы БС15.
Поскольку f0 f+C C0+C + C1t+C2t2+.Cmtm, , то соответственно в каждый момент времени t=0
, то соответственно в каждый момент времени t=0
В БС15 по поступившим сигналам C1, C2, Cm и известным величинам b1, b2, bm, n, m n+1 формируется суммарный сигнал F C1b1 + 2C2b2 + + Cmbmm1! который в каждый момент времени равен
Сигнал F с выхода БС 15 поступает на выход БФСК 6, откуда сигнал F поступает на третий вход БР1 (1).
Примеры технического выполнения блоков БР, БС, БЗ, БУ, БД, БИКК, ПК приведены в книге И.М.Тетельбаума, Ю.Р.Шнейдера "400 схем для АВМ" Москва, Энергия, 1978 г. соответственно на с. 8, 49, 53, 84, 134.
Уравнение движения (2) при F fP(b1+b2P+.bmPn) принимает вид H0Q Hз, соответственно по окончании переходного процесса Ho Hз, т.е. обеспечено достижение технического результата повышение точности работы системы.
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА УПРАВЛЕНИЯ ВЫСОТОЙ ПОЛЕТА | 1994 |
|
RU2081396C1 |
| КОМПЛЕКСНАЯ КУРСОВАЯ СИСТЕМА | 1996 |
|
RU2098322C1 |
| ИНФОРМАЦИОННАЯ СИСТЕМА ФОРМИРОВАНИЯ АБСОЛЮТНОЙ ВЫСОТЫ | 1994 |
|
RU2085851C1 |
| ИНФОРМАЦИОННАЯ СИСТЕМА ПОСАДКИ | 1992 |
|
RU2023984C1 |
| ИНФОРМАЦИОННАЯ СИСТЕМА МЕЖСАМОЛЕТНОЙ НАВИГАЦИИ | 1995 |
|
RU2089449C1 |
| СИСТЕМА УПРАВЛЕНИЯ БОКОВЫМ ДВИЖЕНИЕМ ЛЕТАТЕЛЬНОГО АППАРАТА | 1994 |
|
RU2079108C1 |
| КОМПЛЕКСНАЯ СИСТЕМА НАВИГАЦИИ | 1992 |
|
RU2023983C1 |
| КОМПЛЕКСНАЯ ПРИЦЕЛЬНАЯ СИСТЕМА | 1999 |
|
RU2161777C1 |
| КОМПЛЕКСНАЯ ИНЕРЦИАЛЬНАЯ СИСТЕМА | 1996 |
|
RU2089450C1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ МАГНИТНЫХ ПОЛЕЙ | 1997 |
|
RU2124737C1 |



Использование: изобретение относится к области приборостроения, в частности к системам управления высотой при посадке на подвижное, колеблющееся основание (палуба авианосца). Сущность: система управления высотой полета при посадке содержит задатчик высоты, блок разности, блок информационных датчиков, контур стабилизации и дополнительно введенные блок формирования относительной высоты и блок формирования сигнала коррекции, обеспечивающие управление по высоте относительно подвижной, колеблющейся плоскости посадки и компенсацию возмущающих воздействий. 2 з.п. ф-лы, 5 ил.
| Загайнов Г.И., Гуськов Ю.П | |||
| Управление полетом самолетов | |||
| - М.: Машиностроение, 1981, с | |||
| Вага для выталкивания костылей из шпал | 1920 |
|
SU161A1 |
