Изобретение относится к приборостроению, в частности к инерциальным системам навигации и ориентации летательных аппаратов (ЛА).
Известны инерциальные системы, описания и структурные схемы которые приведены в книгах Кирста М.А. Навигационная кибернетика полета. М. Воениздат 1971 г. стр. 50; Помыкаева И.И. и др. Навигационные приборы и системы. М. Машиностроение, 1983 г. стр. 311; Кузовкова Н.Т. Салычева О.С. Инерциальная навигация и оптимальная фильтрация. М. Машиностроение, 1982 г. стр. 56; Бабича О. А. Обработка информации в навигационных комплексах. М. Машиностроение, 1991 г. стр. 376. В этих системах по данным блока датчиков угловых скоростей БДУС 1 (трехкомпонентный датчик угловых скоростей ЛА) и блока датчиков линейных ускорений БДЛУ1 (трехкомпонентный датчик линейных ускорений), устанавливаемый вблизи центра масс ЛА, в блоке формирования параметров навигации и ориентации БФПНО (навигационный вычислитель) формируются составляющие путевой скорости, координаты местоположения и углы ориентации ЛА.
Кроме БДЛУ1, БДУС1 в различных точках на борту ЛА устанавливаются блоки датчиков БДУС2,БДУСn, БДЛУ2,БДЛУm обеспечивающие информацией смежные системы-потребители (см. например, книгу Гуськова Ю.П. Загайнова Г.Н. Управление полетом самолетов. М. Машиностроение, 1980г. стр 96.)
В качестве прототипа выбирается известная система, содержащая первый, n-ый блоки датчиков угловых скоростей БДУС1,БДУС2,БДУСn, первый, m-й датчики линейных ускорений БДЛУ1,БДЛУ2,БДЛУm (здесь n,m количество БДУС, БДЛУ соответственно) и блок формирования параметров навигации и ориентации БФПНО (см. фиг. 1). БДЛУ1, БДУС1 установлены вблизи центра масс ЛА. В БДУС1 формируются составляющие угловой скорости ЛА ω1 = ω1j (j 1, 2, 3) (индекс j в дальнейшем не используется), которые с выхода БДУС1 поступают на первый вход БФПНО и выдаются в смежные системы-потребители.
Составляющие линейного ускорения W1 W1j (j 1, 2, 3) с выхода БДЛУ1 поступают на второй вход БФПНО и выдаются в смежные системы - потребители. В БФПНО по параметрам ω1, W1 с учетом известных начальных условий по зависимостям, приведенным в [4] на стр. 374-385, формируются параметры навигации и ориентации составляющие путевой скорости ЛА V Vj (j 1, 2, 3), координаты местоположения ЛА Φ = Φj (j 1, 2, 3) и углы ориентации (курс, крен, тангаж) ЛА α = αj (j 1, 2, 3).
Параметры V, Φ, α, характеризующие движение центра масс ЛА, с первого, второго и третьего выхода БФПНО выдаются потребителям в систему индикации экипажу, в систему управления и стабилизации ЛА и в другие смежные системы.
В БДУС2,БДУСn, БДЛУ2,БДЛУm формируют соответственно параметры w2 = ω2j (j 1, 2, 3),ωn = ωnj (j 1, 2, 3), W2 W2j (j 1, 2, 3), Wm Wmj (j 1, 2, 3), характеризующие движение в точках установки датчиков, которые выдаются в системы потребители этих параметров - систему управления и стабилизации ЛА, в систему прицеливания, системы заданной ориентации бортовых локационных и прицельных средств и в другие смежные системы.
При отказах БДУС1 или БДЛУ1 система становится неработоспособной в части формирования параметров навигации и ориентации в БФПНО, что является ее недостатком.
Технико-экономическим эффектом предлагаемого технического решения является повышение надежности и точности.
Технико-экономический эффект достигается, тем, что в инерциальную систему, содержащую первый,n-ый блоки датчиков угловых скоростей, первый,m-ый блоки датчиков угловых ускорений и блок формирования параметров навигации и ориентации, дополнительно введены первый,n-ый фильтры угловых скоростей, первый,m-ый фильтры линейных ускорений, первый и второй блоки обработки информации, причем на первый, n-ый входы первого блока обработки информации подключены соответственно выходы первого,n-го фильтров угловых скоростей, на первые входы которых подключены соответственно первые выходы первого,n-го блоков датчиков угловых скоростей, вторые выходы которых подключены соответственно к (n+1)-му,2n му входам первого блока обработки информации, выход которого подключен к первому входу блока формирования параметров навигации и ориентации и ко вторым входам первого,n-го фильтров угловых скоростей; на первый,m-ый входы второго блока обработки информации подключены соответственно выходы первого,m-го фильтров линейных ускорений, на первые входы которых подключены соответственно первые выходы первого,m-го блоков датчиков линейных ускорений, вторые выходы которых подключены соответственно к (m+1)-му,2m -му входам второго блока обработки информации, выход которого подключен ко вторым входам блока формирования параметров навигации и ориентации, первого,m-го фильтров линейных ускорений.
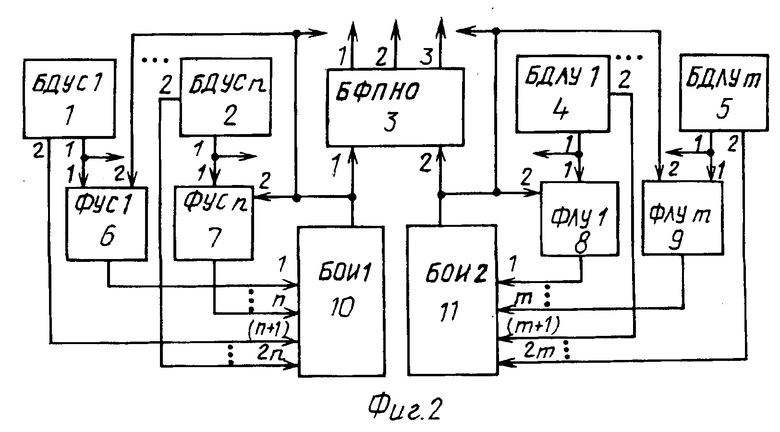
На фиг.1 представлена блок-схема прототипа, обозначения блоков на которой приведены выше; на фиг.2 блок-схема предлагаемой системы, содержащей: 1
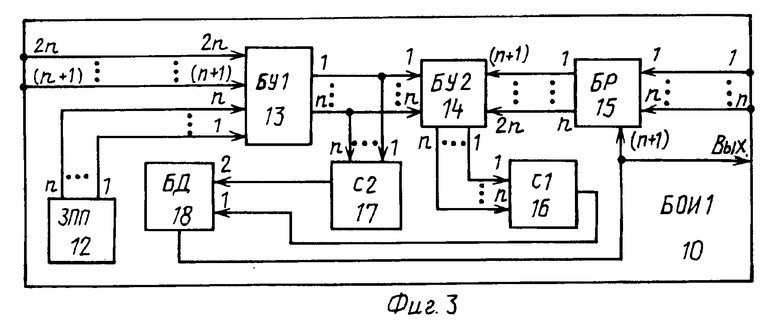
первый блок датчиков угловых скоростей БДУС1, 2 n-ый блок датчиков угловых скоростей БДУСn, 3 блок формирования параметров навигации и ориентации БФПНО, 4 первый блок датчиков линейных ускорений БДЛУ1, 5 m-ый блок датчиков линейных ускорений БДЛУm, 6 первый фильтр угловых скоростей ФУС1, 7 n-ый фильтр угловых скоростей ФУСn, 8 первый фильтр линейных ускорений ФЛУ1, 9 m-ый фильтр линейных ускорений ФЛУm, 10 первый блок обработки информации БОИ1, 11 второй блок обработки информации БОИ2, на фиг.3 блок - схема БОИ1 (10), содержащая: 12 задатчик постоянных параметров БУ1, 14 - второй блок умножения БУ2, 15 блок разности БР, 16 первый сумматор С1, 17 второй сумматор С2, 18 блок деления БД.
Система работает следующим образом.
БДУС1,БДУС (2) измеряют составляющие угловой скорости в местах установки
где
ω точное значение составляющих угловой скорости в центре масс,
wк1, ..., ωкп угловые скорости от изгибно-крутильных колебаний ЛА, для формирования параметров навигации и ориентации ωк1, ..., ωкп являются погрешностями, а для систем-потребителей это полезная информация; систематическое (медленноменяющиеся) погрешности со среднеквадратическими значениями
систематическое (медленноменяющиеся) погрешности со среднеквадратическими значениями  ;
; флюктуационные погрешности со средне-квадратическими значениями
флюктуационные погрешности со средне-квадратическими значениями  .
.
При этом
где
A1e, Ane амплитуда колебаний,
ω1e, ωпe частота колебаний,
e количество тонов колебаний,
t время.
Известен пример технического исполнения БДУС. БДЛУ1,БДЛУm (5) измеряют составляющие линейных ускорений в местах установки
где
W точное значение составляющих ускорений в центре масс,
Wk1, Wkm ускорение от изгибно-крутильных колебаний ЛА, для формирования параметров навигации и ориентации Wk1, Wkm являются погрешностями, а для систем потребителей это полезная информация; систематические (медленноменяющиеся) погрешности со среднеквадратическими значениями
систематические (медленноменяющиеся) погрешности со среднеквадратическими значениями 
 высокочастотные флюктуационные погрешности со среднеквадратическими значениями
высокочастотные флюктуационные погрешности со среднеквадратическими значениями  .
.
При этом ,
,
где
B1e, Bme амплитуда колебаний;
ω1e, ωme частота колебаний,
e количество тонов колебаний.
Погрешности от статического изгиба ЛА, которые могут быть скомпенсированы алгоритмически при априорно известных углах статического изгиба в местах установки датчиков в зависимости от загрузки, не учитываются.
Пример технического выполнения БДУС приведен в книге Боднера В.А. Приборы первичной информации. М. Машиностроение, 1991г. стр. 335.
С первого выхода БДУС1 (1) сигнал ω1 выдается потребителям и поступает на первый вход ФУС1 (6), на второй вход которого поступает сигнал  с выхода БОИ1 (10). С первого выхода БДУСn (2) сигнал wn выдается потребителям и поступает на первые вход ФУСn (7), на второй вход которого поступает сигнал
с выхода БОИ1 (10). С первого выхода БДУСn (2) сигнал wn выдается потребителям и поступает на первые вход ФУСn (7), на второй вход которого поступает сигнал  с выхода БОИ1 (10).
с выхода БОИ1 (10).
С первого выхода БДЛУ (4) сигнал W1 выдается потребителям и поступает на первый вход ФЛУ (8), на второй вход которого поступает сигнал  с выхода БОИ2 (11). С первого выхода БДЛУ m (5) сигнал Wm выдается потребителям и поступает на первый вход ФЛУ m (9), на второй вход которого поступает сигнал
с выхода БОИ2 (11). С первого выхода БДЛУ m (5) сигнал Wm выдается потребителям и поступает на первый вход ФЛУ m (9), на второй вход которого поступает сигнал  с выхода БОИ2 (11).
с выхода БОИ2 (11).
В ФУС1 (6), ФУСn (7) формируются соответственно сигналы
(здесь r1, R1, rn, Rn полиномы передаточных функций), поступающие соответственно на первый, n-ый входы БОИ1 (10), на (n + 1),2n й входы которого поступают соответственно со вторых выходов БДУС1 (1),БДУСn (2) сигналы U1, Un, свидетельствующие о исправном состоянии датчиков при U1= 1 исправность, U1= 0 отказ, Un= 1 исправность, Un= 0 отказ.
В ФЛУ1 (8),ФЛУm(9) формируются соответственно сигналы  (здесь q1, Q1, Qm, qm полиномы передаточных функций), поступающие соотвественно на первый,m-ый входы БОИ2 (11), на (m + 1)-ый,2m-ый входы которого со вторых входов БДЛУ1 (4), БДЛУ m (5) соответственно поступают сигналы U1,Um, свидетельствующие о исправности состояния датчиков при U1= 1 исправность, U1= 0 отказ, Um=1 исправность, Um= 0 отказ.
(здесь q1, Q1, Qm, qm полиномы передаточных функций), поступающие соотвественно на первый,m-ый входы БОИ2 (11), на (m + 1)-ый,2m-ый входы которого со вторых входов БДЛУ1 (4), БДЛУ m (5) соответственно поступают сигналы U1,Um, свидетельствующие о исправности состояния датчиков при U1= 1 исправность, U1= 0 отказ, Um=1 исправность, Um= 0 отказ.
В БОИ1 (10), первый, n-ый входы подключены соответственно к первому,n-му входам БР15; с первого,n-го выхода ЗПП12 сигналы постоянных величин a1,an поступают на первый,n-ый входы БУ1 (13), на (n + 1)- ый, 2n- ый входы которого по (n + 1)-му, 2n му входам БОИ1 (10) и поступают соответственно сигналы a1U1,anUn, которые с первого,n го выходов БУ1 (13) поступают на первый,n ый входы C2 (17), где формируется суммарный сигнал Σ1 =a1U1+ ... +anUn который с выхода С2 (17) поступает на второй вход БД18, с которого сигнал  поступает на (n + 1)- ый вход БР15, БР (15) реализован на "n" элементах разности, на которых соответственно формируются сигналы (
поступает на (n + 1)- ый вход БР15, БР (15) реализован на "n" элементах разности, на которых соответственно формируются сигналы ( x1), (
x1), ( xn) которое с первого,n-го выходов БР15 поступают соответственно на (n + 1)-ый,2n-ый входы БУ2(14). БУ2(14) реализован на "n" элементах умножения, на которых формируются соответственно сигналы (
xn) которое с первого,n-го выходов БР15 поступают соответственно на (n + 1)-ый,2n-ый входы БУ2(14). БУ2(14) реализован на "n" элементах умножения, на которых формируются соответственно сигналы ( x1)•a1И1,(
x1)•a1И1,( - xn)•anИn, которые с первого,n-го выходов БУ2 (14) поступают на первый,n-ый входы С1 (16), где формируется суммарный сигнал
- xn)•anИn, которые с первого,n-го выходов БУ2 (14) поступают на первый,n-ый входы С1 (16), где формируется суммарный сигнал  поступающий на первый вход БД18, где формируется сигнал
поступающий на первый вход БД18, где формируется сигнал
(здесь  ), при этом λ1+ ... +λn=1 тогда
), при этом λ1+ ... +λn=1 тогда
соответственно при S ,
,
Примеры технического выполнения элементов БР, С, БУ, БД, ЗПП приведены в книге Тетельбаума И.М. Шнейдера Ю.Р. 400 схем для АВМ. М. Энергия, 1978г. на стр. 10, стр. 53, стр. 93 соответственно.
При передаточных функциях ФУС (6), ФУСn (7)

(здесь p оператор дифференцирования, T,τ постоянные времени, x - постоянный коэффициент демпфирования), выбирается S1 полином, обеспечивающий устойчивость и качество регулирования, 
будет
т.е. подавляется погрешность от "l" тонов изгибно-крутильных колебаний.
ФУС1 (6), ФУСn (7) реализует на "l" последовательно соединенных элементах второго порядка.
Погрешность от систематических (медленноменяющихся) составляющих 
после окончания переходного процесса будет погрешность
а так как величины  являются случайными независимыми, то среднеквадратическая погрешность
являются случайными независимыми, то среднеквадратическая погрешность
Постоянные величины a1,an,формируемые в ЗПП12, выбираются обратнопропорциональными дисперсиями погрешностей 
тогда при исправности всех датчиков U1=U2=Un=1
Если индексы погрешностей датчиков выбраны по приоритету, а именно первый наиболее точный  то очевидно, что
то очевидно, что  т.е. погрешность оптимально осредненного параметра
т.е. погрешность оптимально осредненного параметра  всегда меньше погрешности наиболее точного датчика. Например, при
всегда меньше погрешности наиболее точного датчика. Например, при  (датчики равноточные)
(датчики равноточные)  (Здесь n количество датчиков).
(Здесь n количество датчиков).
При отказе одного из датчиков, например при отказе БДУСn (2) Un 0, тогда
соответственно при равноточных датчиках  будет
будет  что, например, при n 5 составляет
что, например, при n 5 составляет  т.е. точность повышается в 2 раза.
т.е. точность повышается в 2 раза.
При отказе наиболее точного датчика БДУС1 (1) U1 0
откуда следует, что при равноточных датчиках соответственно, например, при
соответственно, например, при  т. е. погрешность комплексного параметра меньше погрешности наиболее точного отказавшего датчика. Таким образом повышаются показатели надежности и обеспечивается повышение точностных характеристик.
т. е. погрешность комплексного параметра меньше погрешности наиболее точного отказавшего датчика. Таким образом повышаются показатели надежности и обеспечивается повышение точностных характеристик.
Погрешность от высокочастотных флюктуационных составляющих (здесь при b1,bn постоянные величины,
(здесь при b1,bn постоянные величины,
Высокочастотные флюктуационные погрешности в основном определяются вибрационными характеристиками в местах установки датчиков, конструктивные требования которых к вибрационным характеристикам в местах установки одинаковы, тогда а так как C1<1,Cn<1, C1+C2+. +Cn<1, то
а так как C1<1,Cn<1, C1+C2+. +Cn<1, то
т. е. составляющая погрешности комплексного параметра  от высокочастотных погрешностей
от высокочастотных погрешностей  меньше погрешностей датчиков.
меньше погрешностей датчиков.
С выхода БОИ1 (10) сигнал  выдается потребителям и поступает на один вход БФПНОЗ.
выдается потребителям и поступает на один вход БФПНОЗ.
БОИ2 (11) по исполнению аналогичен БОИ1 (10) с заменой индекса "n" на "m". На выходе БОИ2 (11) формируется сигнал
где
S
При передаточных функциях ФЛУ (8),ФЛУm (9)
(здесь β, g постоянные времени, d коэффициент демпфирования), откуда следует, что при наличии S
т.е. подавляются погрешности от "e" тонов изгибно-крутильных колебаний.
ФЛУ1 (8), ФЛУm (9) реализуются на "m" последовательно-соединенных элементах второго порядка.
Погрешность от систематических составляющих 
будет меньше погрешности наиболее точного датчика.
Погрешность от высокочастотных флуктуационных составляющих  определяемых вибрационными характеристиками в местах установки датчиков, при
определяемых вибрационными характеристиками в местах установки датчиков, при 
(здесь D1<1,Dm<1, D1+Dm=1,  ) меньше погрешностей датчиков.
) меньше погрешностей датчиков.
При отказах датчиков БОИ2 (11) работает аналогично БОИ1 (10).
С выхода БОИ2 (11) сигнал  выдается потребителям и поступает на второй вход БФПНОЗ, в котором по поступившим сигналам
выдается потребителям и поступает на второй вход БФПНОЗ, в котором по поступившим сигналам  и при известных начальных условиях формируются параметры навигации и ориентации ЛА:
и при известных начальных условиях формируются параметры навигации и ориентации ЛА:
составляющие путевой скорости  ,
,
координаты местоположения  ,
,
углы ориентации (курс, крен, тангаж)  , которые с первого, второго и третьего выхода БФПНОЗ выдаются потребителям.
, которые с первого, второго и третьего выхода БФПНОЗ выдаются потребителям.
Формируемые в БФПНОЗ параметры V, φ, α являются функциями 
т.е. в общем виде П П ( ) (здесь П параметр), тогда погрешность
) (здесь П параметр), тогда погрешность
где суммарные погрешности,
суммарные погрешности, частные производные.
частные производные.
Так как погрешности  меньше, чем в системе прототипе, то погрешности ΔП также будут меньше.
меньше, чем в системе прототипе, то погрешности ΔП также будут меньше.
Таким образом введение новых связей и дополнительных блоков обеспечивают повышение надежности и точности формирования параметров навигации и ориентации в комплексной инерциальной системе, что свидетельствует о достижении технико-экономического эффекта.
| название | год | авторы | номер документа |
|---|---|---|---|
| ИНФОРМАЦИОННАЯ СИСТЕМА МЕЖСАМОЛЕТНОЙ НАВИГАЦИИ | 1995 |
|
RU2089449C1 |
| СИСТЕМА УПРАВЛЕНИЯ ВЫСОТОЙ ПОЛЕТА ПРИ ПОСАДКЕ | 1996 |
|
RU2102281C1 |
| КОМПЛЕКСНАЯ НАВИГАЦИОННАЯ СИСТЕМА | 2004 |
|
RU2260177C1 |
| КОМПЛЕКСНАЯ ИНФОРМАЦИОННАЯ СИСТЕМА НАВИГАЦИИ И НАВЕДЕНИЯ | 1999 |
|
RU2154283C1 |
| КОМПЛЕКСНАЯ НАВИГАЦИОННАЯ СИСТЕМА | 2004 |
|
RU2265190C1 |
| КОМПЛЕКСНАЯ КУРСОВАЯ СИСТЕМА | 1996 |
|
RU2098322C1 |
| ИНЕРЦИАЛЬНО-СПУТНИКОВАЯ НАВИГАЦИОННАЯ СИСТЕМА | 1998 |
|
RU2148796C1 |
| СИСТЕМА АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ПОЛЕТОМ ЛЕТАТЕЛЬНОГО АППАРАТА | 1999 |
|
RU2147009C1 |
| КОМПЛЕКСНАЯ НАВИГАЦИОННАЯ СИСТЕМА | 2004 |
|
RU2263281C1 |
| ИНФОРМАЦИОННАЯ СИСТЕМА ГРУППОВОГО САМОЛЕТОВОЖДЕНИЯ | 1995 |
|
RU2087868C1 |
Использование: системы навигации и ориентации летательных аппаратов. Сущность: комплексная инерциальная система содержит n блоков датчиков угловых скоростей, блок формирования параметров навигации и ориентации, m блоков датчиков линейных ускорений, n фильтров угловых скоростей, m фильтров линейных ускорений, два блока обработки информации. 1 з.п. ф-лы, 3 ил.
| Бабич О.А | |||
| Обработка информации в навигационных комплексах | |||
| - М.: Машиностроение, 1991, с | |||
| Устройство для телефонирования по проводам токами высокой частоты | 1921 |
|
SU374A1 |
