Изобретение относится к авиационному приборостроению, в частности к информационным средствам навигации и посадки летательных аппаратов (ЛА).
Известны датчики полярных координат ориентиров (ДПКО) с лазерным дальномерным каналом, (см., например, Лазарев А.П. Инфракрасные и световые приборы самонаведения летательных аппаратов. М.: Машиностроение, 1970 г.) измеряющих дальность Дo и угол визирования ориентира ϕo
Известен инерциально-спутниковый (спутниковый) датчик координат (СДК) (см. , например, Кирс М.А) Навигационная кибернетика полета, М.; Воениздат, 1971; Регламент эксплуатации изделия А-735. ФБМИ. 461531.002 РЭ, МКБ "Компас", М. ; 1991), измеряющий географические координаты местоположения ЛА.
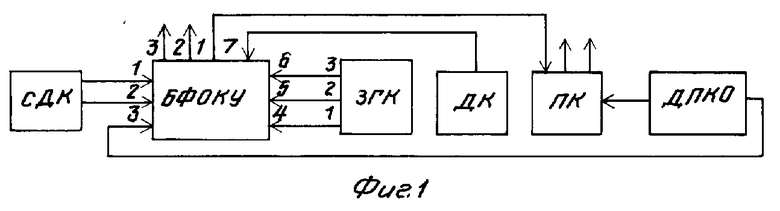
Система, содержащая датчик полярных координат ориентира ДПКО, спутниковый датчик координаты СДК, задатчик горизонтальных координат и величины π, датчик курса ДК, преобразователь координат ПК, блок формирования относительных координат и угла БФОКУ, выбирается в качестве прототипа (Бортовой комплеккс радиоэлектронного оборудования самолета "Ямал". Эскизный проект, Моск. обл. , г. Раменское, РПКБ, 1991). Данная система формирует в БФОКУ географические координаты ЛА относительно ориентира на основе измерений СДК
хи = хсг + хoг = хс + Δ1
zи = zcг - zoг = zc + Δ2 где xc, zc-действительные значения коорди нат ЛА относительно ориентира;
хoг, zoг - географические координаты ориентира;
Δ1, Δ2 - постоянные погрешности СДК, а также географические координаты ЛА относительно ориентира на основе измерений курса датчиком курса ДК и полярных координат Do, ϕo , измеряемых ДПКО,
хo= Dosin ( π - ϑи - ϕo ) ,
zo = Docos ( π - ϑи - ϕo ) , в современныx ДПКО Δ D ≈ 0 , Δ ϕ ≈ 0, тогда при ( π - ϑи - ϕo ) = αи = α - Δ , где Δ - постоянная погрешность курса.
хo = хс. сos Δ - zc. sinΔ ;
zo = zc. cosΔ + хс. sinΔ.
Для современных датчиков Δ1 = Δ2 ≈ 20 м, Δ ≈ 0,5o и погрешности δ zo = Δ ˙ xc , δ xo = Δ ˙ zc, что, например, при хс = zc = 2000 м составляет δ xo = δ zo = 20 м; наличие этих погрешностей является недостатком прототипа как системы информационных параметров навигации и особенно режима захода на посадку и посадки ЛА.
Цель изобретения - повышение точности системы в работе.
Это достигается тем, что в комплексную систему навигации, содержащую спутниковый датчик координат, блок формирования относительных координат и угла, первый и второй входы которого соединены соответственно с первым и вторым выходами спутникового датчика координат, последовательно соединенные датчик полярных координат ориентира, второй выход которого соединен с третьим входом блока формирования относительных координат и угла, и преобразователь координат, второй вход которого соединен с первым выходом блока формирования относительных координат и угла, задатчик горизонтальных координат ориентира и величины π первый, второй и третий выходы которого соединены соответственно с четвертым, пятым и шестым входами блока формирования относительных координат и угла, и датчик курса, выход которого соединен с седьмым входом блока формирования относительных координат и угла, дополнительно введены блок линий задержки, первый и второй входы которого соединены соответственно с вторым и третьим выходами блока формирования относительных координат и угла, а третий и четвертый входа - соответственно с первым и вторым выходами преобразователя координат, блок интеграторов, первый выход которого соединен с пятым входом блока линий задержки и восьмым входом блока формирования относительных координат и угла, а также блок коррекции, входы которого с первого по пятый соединены соответственно с выходами с первого по пятый блока линий задержки, шестой и седьмой входы блока коррекции соединены соответственно с вторым и третьим выходами блока формирования относительных координат и угла, восьмой и девятый входы - соответственно с вторым и третьим выходами блока интеграторов, десятый и одиннадцатый входы - соответственно с первым и вторым выходами преобразователя координат, а двенадцатый вход объединен с пятым входом блока линий задержки, выходы блока коррекции с первого по третий соединены соответственно с входами блока интеграторов с первого по третий, причем блок интеграторов выполнен на основе трех интеграторов. Входы первого второго и третьего интеграторов подключены соответственно к первому, второму и третьему входам блока интеграторов, к первому, второму и третьему выходам которого подключены соответственно выходы третьего, первого и второго интеграторов, блок линий задержки выполнен на основе пяти блоков задержки.
Причем первый, второй, третий, четвертый и пятый блоки задержки включены соответственно между первым-пятым входами и первым-пятым выходами блока линии задержки. Блок коррекции выполнен на основе шести блоков умножения, одиннадцати блоков разности, двух сумматоров, блока деления и блока формирования арктангенса, причем первый блок разности, первый блок умножения, второй блок разности, второй блок умножения, первый сумматор, блок деления и блок формирования арктангенса соединены последовательно, третий блок разности, второй сумматор и третий блок умножения соединены последовательно, четвертый блок разности, четвертый блок умножения, второй вход которого соединен с выходом второго сумматора и пятый блок разности, выход которого соединен с вторым входом блока деления, соединены последовательно, шестой блок разности и пятый блок умножения, выход которого соединен с вторым входом пятого блока разности, соединены последовательно, седьмой блок разности и восьмой блок разности соединены последовательно, выход девятого блока разности соединен с вторым входом второго блока разности, десятый и одиннадцатый блоки разности соединены последовательно, первый вход шестого блока умножения соединен с выходом первого блока разности, а выход - с вторым входом второго сумматора, выход второго блока разности соединен с вторым входом пятого блока умножения, выход шестого блока разности подключен также к второму входу третьего блока умножения, выход которого подключен к второму входу первого сумматора, первые входы соответственно четвертого, шестого, девятого, третьего и первого блоков разности являются соответственно первым, вторым, третьим, четвертым и пятым входами блока коррекции, объединенные второй вход четвертого блока разности и первый вход десятого блока разности являются шестым входом блока коррекции.
Объединенные второй вход шестого и первый вход седьмого блоков разности являются седьмым входом блока коррекции, вторые входы десятого и седьмого блоков разности являются соответственно восьмым и девятым входами блока коррекции, объединенные вторые входы девятого блока разности, шестого блока умножения и одиннадцатого блока разности являются десятым входом блока коррекции, объединенные вторые входы третьего блока разности, первого блока умножения и восьмого блока разности являются одиннадцатым входом блока коррекции, второй вход первого блока разности является двенадцатым входом блока коррекции, выходы одиннадцатого, восьмого блоков разности, блока формирования арктангенса, десятого и седьмого блоков разности являются соответственно первым, вторым, третьим, четвертым и пятым выходами блока коррекции.
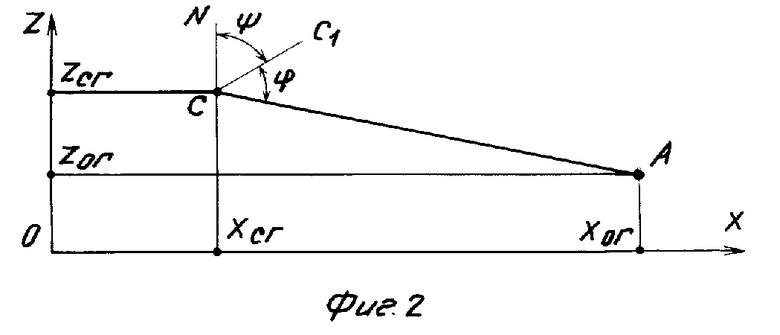
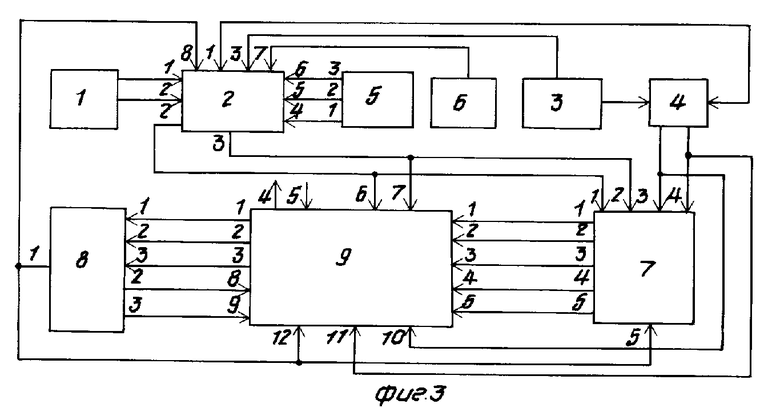
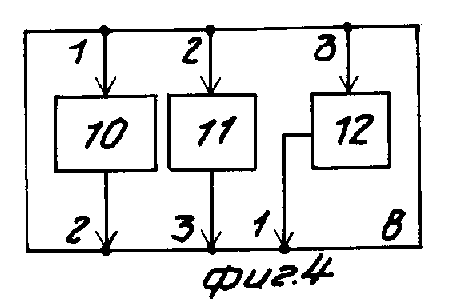
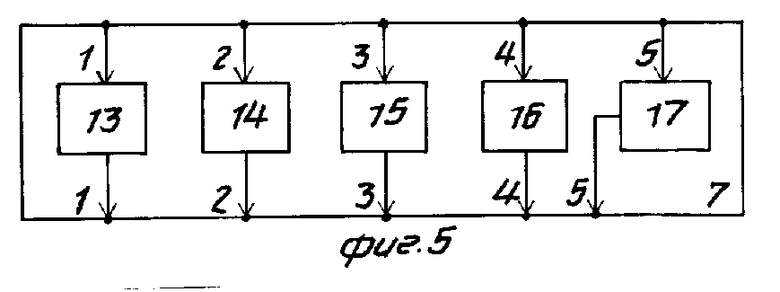
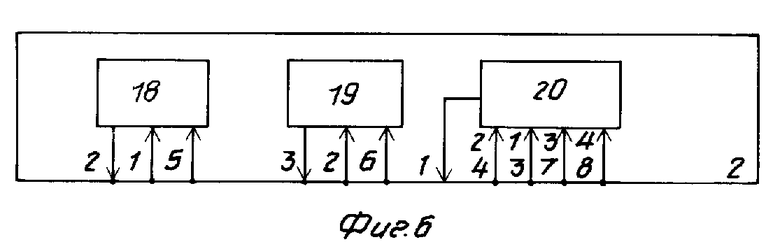
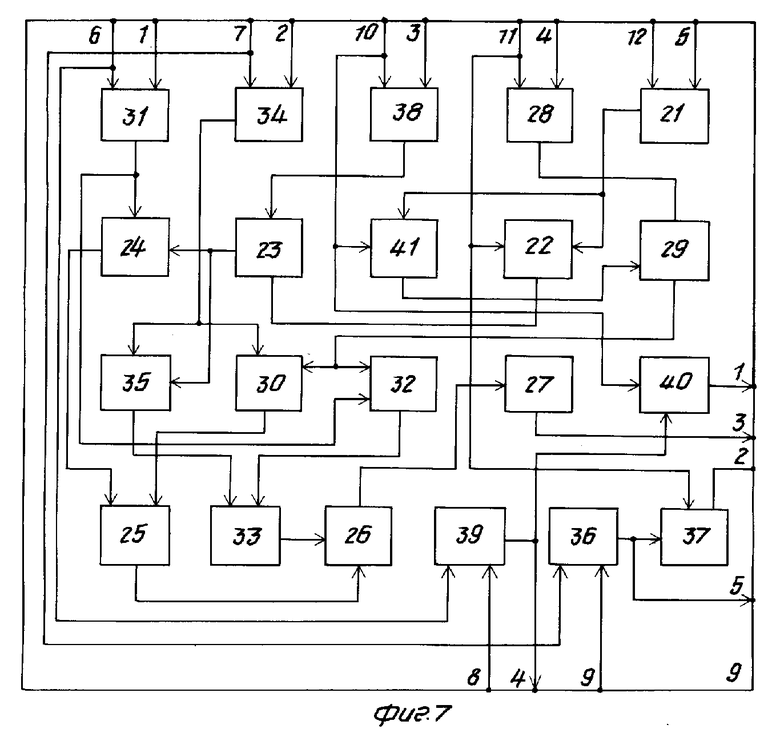
На фиг. 1 представлена структурная схема системы-прототипа; на фиг.2 показано взаимное положение летательного аппарата (точка С, СС1 - продольная ось) и ориентира (точка А) в географической системе координат ОХ (СN - направление на север, ϑ- географический курс, ϕ - угол визирования ориентира, α- относительный угол; хcг, Zcг - географические координаты летательного аппарата; хoг, zoг - географические координаты ориентира А; на фиг.3 - структурная схема предлагаемой системы, содержащей спутниковый датчик координат СДК 1, блок формирования относительных координат и угла БФОКУ 2, задатчик горизонтальных координат и величины π 3ГК5, датчик курса ДК6, датчик полярных координат ориентира ДПКO 3, преобразователь координат ПК 4, блок интегрирования БИ 8, блок коррекции БК 9, блок линий задержки БЛЗ 7; на фиг. 4 структурная схема БИ8, содержащего первый-третий интеграторы И1(10), И2(11), И3(12); на фиг.5 cтруктурная схема БЛЗ 7, содержащего первый-пятый блоки запаздывания Б31(13), Б32(14), Б33(15), Б34(16), Б35(17); на фиг. 6 структурная схема БФОКУ 2, содержащего первый-третий элементы разности ЭР1(18), ЭР2(19), ЭРЗ(20); на фиг.7 структурная схема БК9, содержащего первый-одиннадцатый блоки разности БР1(21), БР2(23), БРЗ(28), БР4(31), БР5(33), БР6(34), БР7(36), БР8(37), БР9(38), БР10(39), БР11(40); первый-шестой блоки умножения БУ1(22), БУ2(24), БУ3(30), БУ4(32), БУ5(35), БУ6(41); первый и второй сумматоры СI(25), С2(29); блок формирования aрктангенса БФА 27; блок деления БД26.
Система работает следующим образом.
СДК1 измеряет и выдает с одного и другого выходов географические координаты хсг, zсг, поступающие на первый и второй входы БФОКУ 2; ДКПО 3 измеряет и выдает с одного своего выхода дальность D поступающую на один вход ПК 4, а с другого выхода - угол визирования ориентира ϕ поступающий на третий вход БФОКУ 2, на четвертый-шестой входы которого с ЗГК 5 поступают постоянные сигналы географических координат ориентира хог, z01 и постоянной величины π= 180oC.
На седьмой и восьмой входы БФОКУ2 поступают соответственно сигнал угла курса ϑи = ϑ + Δ с ДК 6 и сигнал поправки -n с третьего выхода БИ 8.
В БФОКУ 2 (см. фиг.6) первый и пятый входы подключены к одному и другому входам ЭР1 18, где формируется сигнал хи = =хсг + хoг = хс + Δ1 , поступающий на второй выход БФОКУ 2, откуда сигнал хи поступает на первый вход БЛЗ 7 и на шестой вход БК 9; второй и шестой входы БФОКУ 2 подключены к одному и другому входам ЭР2 19, где формируется сигнал zи = zcг - zoг = zc + +Δ2, поступающий на третий выход БФОКУ 2, откуда сигнал zи поступает на второй вход БЛЗ 7 и на седьмой вход БК 9; третий, четвертый, седьмой и восьмой входы БФОКУ 2 подключены соответственно к первому-четвертому входам ЭРЗ 20, где формируется сигнал αк = π - ϑи - ϕ -(-n) = α - Δ + n, который с первого выхода БФОКУ 2 поступает на другой вход ПК 4, где формируются сигналы
хo = D sin ( α - Δ +n) = = хс сos (Δ -n) - zcsin ( Δ-n),
zo = D cos ( α - Δ +n) = = хс sin (Δ -n) + zccos ( Δ-n), которые с одного и другого выходов ПК 4 поступают соответственно на десятый и одиннадцатый входы ПК 9 и соответственно на третий и четвертый входы БЛ 37, на пятый вход которого с первого выхода БИ 8 поступает сигнал -n, поступающий также на двенадцатый вход БК 9. В БЛ3 7 первый-пятый входы подключены соответственно к входам Б31(13)Б, Б32(14), Б3315, Б34(16), Б35(17), на выходах которых формируются соответственно сигналы с запаздывания на время τ
х1 = хи(t - τ), z1 = zи(t- τ), х2 = хo(t- τ), z2 = =zo(t- τ), -n(t- τ) = n1, поступающие с первого-пятого выходов БЛ3 7 на первый-пятый входы БК9, на восьмой и девятый входы которого с второго и третьего выходов БИ 8 поступают сигналы δ x , δ z.
В БК 9 (см.фиг.7) первый и шестой входы подключены к одному и другому входам БР4(31), где формируется сигнал хu - х1 = хс(t) - хс(t-τ ) = х3, поступающий на один вход БУ2(24) и на один вход БУ3(30);
второй и седьмой входы подключены к одному и другому входам БР6(34), где формируется сигнал
zи-z1 = zc(t) - zc(t-τ ) = z3, поступающий на один вход БУ5(35) и на один вход БУ3(30);
третий и десятый входы подключены к одному и другому входам БР9(38), где формируется сигнал х4 = хo - х2 = х3сos( Δ-n)-z3sin( Δ-n), поступающий на один вход БР2(23);
четвертый и одиннадцатый входы подключены соответственно к одному и другому входам БРЗ(28), где формируется сигнал
z4 = zo - z2 = z3 cos ( Δ-n) + х3 sin (Δ-n) - n2 хo, поступающий на один вход С2(29);
пятый и двенадцатый входы подключены соответственно к одному и другому входам БР1(21), где формируется сигнал
n2 = [(-n)-n1] = n(t- τ) - n(t), поступающий на один вход БУ6(41) и на один вход БУ1(22), на другой вход которого поступает сигнал zo(t) c одиннадцатого входа БК 9, десятый вход которого подключен к другому входу БУ6(41), где формируется сигнал (n2.хo), поступающий на другой вход С2(29), где формируется сигнал u2 = n2хo + z4 = z3cos( Δ-n)+х3sin( Δ-n), поступающий на другой вход БУ3(30) и на другой вход БУ4(32), где формируется сигнал (u2 x3), поступающий на один вход БР5(33); в БУ1(22) формируется сигнал (n2.zo), поступающий и на другой вход БР2(23), где формируется сигнал u1 = х4 - n2zo = х3сos( Δ-n)-z3sin(Δ -n), поступающий на другой вход БУ2(24) и на другой вход БУ5(35), где формируется сигнал (u1z3), поступающий на другой вход БР5(33), где формируется сигнал γ1 = u1 z3 - u2х3 = -(х23 + z23) sin ( Δ-n), поступающий на один вход БД(26); в БУЗ(30) формируется сигнал (u2z3), поступающий на один вход С1(25); в БУ2(24) формируется сигнал (u1х3), поступающий на другой вход С1(25), где формируется сигнал γ2 = u1х3 + u2z3 = (х23 + z23) cos ( Δ -n), поступающий на другой вход БД(26), где формируется сигнал = -tg(Δ-n) = tg(n-Δ), поступающий на вход БФА(27), где формируется сигнал n-Δ = arctg
= -tg(Δ-n) = tg(n-Δ), поступающий на вход БФА(27), где формируется сигнал n-Δ = arctg , поступающий на третий выход БК 9, восьмой вход БК 9 (сигнал δ х) подключен к одному входу БР10(39), к другому входу которого подключен шестой вход БК9 (сигнал хu), в БР10(39) формируется сигнал хcк = хи-δх = хс+Δ2-δх, поступающий на четвертый выход БК9 и на один вход БР11(40), на другой вход которого подключен десятый вход БК9 (сигнал хo), в БР11(40) формируется сигнал (хск - хo), поступающий на первый выход БК9; девятый вход БК9 (сигнал δ z) подключен к одному входу БР7(40), на другой вход которого подключен седьмой вход БК9 (сигнал zи), в БР7(40) формируется сигнал zcк = zu - δz = zc+Δ2- δz, поступающий на пятый выход БК 9 и на один вход БР8(37), на другой вход которого подключен одиннадцатый вход БК 9 (сигнал zo), в БР8 (37) формируется сигнал (zcк - zo), поступающий на второй выход БК 9. Первый-третий выходы БК 9 подключены к первому-третьему входам БИ8. В БИ 8 (см. фиг. 4) первый-третий входы подключены соответственно к И1(10), И2(11), И3(12), где формируются сигналы
, поступающий на третий выход БК 9, восьмой вход БК 9 (сигнал δ х) подключен к одному входу БР10(39), к другому входу которого подключен шестой вход БК9 (сигнал хu), в БР10(39) формируется сигнал хcк = хи-δх = хс+Δ2-δх, поступающий на четвертый выход БК9 и на один вход БР11(40), на другой вход которого подключен десятый вход БК9 (сигнал хo), в БР11(40) формируется сигнал (хск - хo), поступающий на первый выход БК9; девятый вход БК9 (сигнал δ z) подключен к одному входу БР7(40), на другой вход которого подключен седьмой вход БК9 (сигнал zи), в БР7(40) формируется сигнал zcк = zu - δz = zc+Δ2- δz, поступающий на пятый выход БК 9 и на один вход БР8(37), на другой вход которого подключен одиннадцатый вход БК 9 (сигнал zo), в БР8 (37) формируется сигнал (zcк - zo), поступающий на второй выход БК 9. Первый-третий выходы БК 9 подключены к первому-третьему входам БИ8. В БИ 8 (см. фиг. 4) первый-третий входы подключены соответственно к И1(10), И2(11), И3(12), где формируются сигналы
δx = (xск-xo) ·  ,
,
δz = (z zo) ·
zo) · 
-n = (n-Δ) где Т, τ - постоянные времени;
где Т, τ - постоянные времени;
Р - оператор дифференцирования, поступающие соответственно на второй, третий и первый выходы БИ 8.
Таким образом, на третьем выходе БИ 8 будет -n = - Δ(τp+1)-1 или n = Δ (τp+1)-1, соответственно (Δ-n) = Δ ˙ (τp+1)-1τp -> 0 (при Δ = сonst) и на одном, и на другом выходах ПК4 после окончания переходного процесса при cos (Δ-n) ->1, sin(Δ-n) -> 0 будут откорректированные сигналы
хo = хс, zo = zc, выдаваемые потребителям.
При хo = хс, zo = zc на выходах И1(10) и И2(11) будут сигналы
δx = (xск-xс) ·  δz = (zск-zс) ·
δz = (zск-zс) ·  соответственно на выходах БР10(39) и БР7(36) будут сигналы
соответственно на выходах БР10(39) и БР7(36) будут сигналы
xск= xc+Δ1- (xск-xс) ·  ,
,
zск= zc+Δ2- (zск-zс) ·  или xск= xc+Δ1·
или xск= xc+Δ1·  , zск= zc+Δ2·
, zск= zc+Δ2·  , откуда следует, что при Δ1 = сonst, Δ2=const, Δ1·
, откуда следует, что при Δ1 = сonst, Δ2=const, Δ1·  _→ 0, Δ2·
_→ 0, Δ2·  _→ 0, хcк = хс, zcк = zc, эти сигналы поступают на четвертый и пятый выходы БК 9, откуда выдаются потребителям. Таким образом проводится компенсация погрешностей Δ1 , Δ2 , Δ ,соответственно достигается технико-экономический эффект.
_→ 0, хcк = хс, zcк = zc, эти сигналы поступают на четвертый и пятый выходы БК 9, откуда выдаются потребителям. Таким образом проводится компенсация погрешностей Δ1 , Δ2 , Δ ,соответственно достигается технико-экономический эффект.
| название | год | авторы | номер документа |
|---|---|---|---|
| КОМПЛЕКСНАЯ СИСТЕМА НАВИГАЦИОННОГО ОБЕСПЕЧЕНИЯ ЗАХОДА НА ПОСАДКУ | 1992 |
|
RU2042923C1 |
| ИНФОРМАЦИОННАЯ СИСТЕМА ПОСАДКИ | 1992 |
|
RU2023984C1 |
| КОМПЛЕКСНАЯ НАВИГАЦИОННАЯ СИСТЕМА | 1992 |
|
RU2115890C1 |
| СИСТЕМА УПРАВЛЕНИЯ ВЫСОТОЙ ПОЛЕТА | 1994 |
|
RU2081396C1 |
| КОМПЛЕКСНАЯ КУРСОВАЯ СИСТЕМА | 1996 |
|
RU2098322C1 |
| КОМПЛЕКС ИНФОРМАЦИОННОГО ОБЕСПЕЧЕНИЯ ГРУППОВОГО ВЗАИМОДЕЙСТВИЯ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 1999 |
|
RU2152078C1 |
| ПРИЦЕЛЬНО-НАВИГАЦИОННЫЙ КОМПЛЕКС | 1999 |
|
RU2139568C1 |
| КОМПЛЕКСНАЯ ПРИЦЕЛЬНАЯ СИСТЕМА | 1999 |
|
RU2161777C1 |
| СИСТЕМА УПРАВЛЕНИЯ БОКОВЫМ ДВИЖЕНИЕМ ЛЕТАТЕЛЬНОГО АППАРАТА | 1996 |
|
RU2096263C1 |
| СИСТЕМА УПРАВЛЕНИЯ ВЫСОТОЙ ПОЛЕТА | 1996 |
|
RU2093420C1 |
Изобретение относится к авиационному приборостроению, в частности к комплексным системам навигации. Цель изобретения - повышение точности системы. Это достигается введением в систему блока линий задержки, блока интеграторов и блока коррекции. При этом в блоке формирования относительных координат и угла формируются относительные координаты xи= xот-xсг, zи= zот-zсг , поступающие в блок коррекции и блок линий задержки, и относительный угол α = 180°-Ψи-ϕo+n, поступающий на один из входов преобразователя координат, где формируются относительные координаты xo, zo , поступающие в блок линий задержки и блок коррекции, в который поступают также сигналы поправок δx, δz, (-n), причем сигнал -n поступает также в блок линий задержки, где формируются сигналы с запаздыванием τ″ x1= xи(t-τ), z1= zи(t-τ), x2= xo(t-τ), z2= zo(t-τ), n1= -n(t-τ) поступающие в блок коррекции 9, где формируются сигналы (xo-xск), (zo-zск), (-Δ+n) , поступающие в блок интеграторов 8, где формируются сигналы  ,
,  ,
,  . При близких к постоянным значениям погрешностей спутникового датчика координат и датчика курса и близких к нулю погрешностях датчика полярных координат ориентира в блоке коррекции формируются откорректированные относительные координаты xск, zск , после окончания переходных процессов равные действительным относительным координатам. 7 ил.
. При близких к постоянным значениям погрешностей спутникового датчика координат и датчика курса и близких к нулю погрешностях датчика полярных координат ориентира в блоке коррекции формируются откорректированные относительные координаты xск, zск , после окончания переходных процессов равные действительным относительным координатам. 7 ил.
КОМПЛЕКСНАЯ СИСТЕМА НАВИГАЦИИ, содержащая спутниковый датчик координат, блок формирования относительных координат и углов, первый и второй входы которого соединены соответственно с первым и вторым выходами спутникового датчика координат, последовательно соединенные датчик полярных координат ориентира, второй выход которого соединен с третьим входом блока формирования относительных координат и угла, и преобразователь координат, второй вход которого соединен с первым выходом блока формирования относительных координат и угла, задатчик горизонтальных координат ориентира и величины π , первый, второй и третий выходы которого соединены соответственно с четвертым, пятым и шестым входами блока формирования относительных координат и угла, и датчик курса, выход которого соединен с седьмым входом блока формирования относительных координат и угла, отличающаяся тем, что в нее введены блок линий задержки, первый и второй входы которого соединены соответственно с вторым и третьим выходами блока формирования относительных координат и угла, а третий и четвертый входы - соответственно с первым и вторым выходами преобразователя координат, блок интеграторов, первый выход которого соединен с пятым входом блока линий задержки и восьмым входом блока формирования относительных координат и угла, а также блок корреляции, входы которого с первого по пятый соединены соответственно с выходами с первого по пятый блока линий задержки, шестой и седьмой входы блока коррекции соединены соответственно с вторым и третьим выходами блока формирования относительных координат и угла, восьмой и десятый входы - соответственно с вторым и третьим выходами блока интеграторов, десятый и одиннадцатый входы - соответственно с первым и вторым выходами преобразователя координат, а двенадцатый вход объединен с пятым входом блока линий задержки, выходы блока коррекции с первого по третий соединены соответственно с входами блока интеграторов с первого по третий, а четвертый и пятый выходы являются выходами системы, причем блок интеграторов выполнен на основе трех интеграторов, входы первого, второго и третьего интеграторов являются соответственно первым, вторым и третьим входами блока интеграторов, выходы первого, второго и третьего интеграторов являются соответственно первым, вторым и третьим выходами блока интеграторов, блок линий задержки выполнен на основе пяти блоков задержки, причем входы блоков задержки с первого по пятый являются входами блока линий задержки с первого по пятый соответственно, а выходы блоков задержки с первого по пятый являются соответственно выходами блока линий задержки с первого по пятый, блок коррекции выполнен на основе шести блоков умножения, одиннадцати блоков разности, двух сумматоров, блока деления и блока формирования арктангенса, причем первый блок разности, первый блок умножения, второй блок разности, второй блок умножения, первый сумматор, блок деления и блок формирования арктангенса соединены последовательно, третий блок разности, второй сумматор и третий блок умножения соединены последовательно, четвертый блок разности, четвертый блок умножения, второй вход которого соединен с выходом второго сумматора, и пятый блок разности, выход которого соединен с вторым входом блока деления, соединены последовательно, шестой блок разности и пятый блок умножения, выход которого соединен с вторым входом пятого блока разности, соединены последовательно, седьмой блок разности и восьмой блок разности соединены последовательно, выход девятого блока разности соединен с вторым входом второго блока разности, десятый и одиннадцатый блоки разности соединены последовательно, первый вход шестого блока умножения соединен с выходом первого блока разности, а выход - с вторым входом второго сумматора, выход второго блока разности соединен с вторым входом пятого блока умножения, выход шестого блока разности соединен с вторым входом третьего блока умножения, выход которого соединен с вторым входом первого сумматора, первые входы соответственно четвертого, шестого, девятого, третьего и первого блоков разности являются соответственно первым, вторым, третьим, четвертым и пятым входами блока коррекции, объединенные второй вход четвертого блока разности и первый вход десятого блока разности являются шестым входом блока коррекции, объединенные второй вход шестого и первый вход седьмого блоков разности являются седьмым входом блока коррекции, вторые входы десятого и седьмого блоков разности являются соответственно восьмым и девятым входами блока коррекции, объединенные входы девятого блока разности, шестого блока умножения и одиннадцатого блока разности являются десятым входом блока коррекции, объединенные вторые входы третьего блока разности, первого блока умножения и восьмого блока разности являются одиннадцатым входом блока коррекции, второй вход первого блока разности являются двенадцатым входом блока коррекции, выходы одиннадцатого блока разности, восьмого блока разности, блока формирования арктангенса, десятого и седьмого блоков разности являются соответственно первым, вторым, третьим, четвертым и пятым выходами блока коррекции.
| Бортовой комплекс радиоэлектронного оборудования самолета "Ямал" | |||
| Эскизный проект, Моск.обл., г.Раменское, РПКБ, 1991. |
