Изобретение относится к авиационному приборостроению, в частности к информационным средствам посадки летательных аппаратов ЛА.
Известен спутниковый датчик координат (СДК), измеряющий географические координаты местоположения ЛА [1].
Погрешности современных СДК по координатам составляют Δ1 = Δ2 =20 м, что практически не позволяет осуществлять посадку.
Известен датчик полярных координат ориентира (ДПКО) с пультом управления ПУ с лазерным каналом измерения дальности до ориентира, изменяющий дальность Do и угол визирования ориентира ϕo [2].
Координаты ЛА относительно ориентира (например обрез полосы) имеют вид
Ho = Dosin ( ϕo - V) = Dosin α ,
Lo = Docos ( ϕo- V) = Docosα , где V - угол тангажа;
Do = D + ΔD, Δ D = 5 м, Δ V = 0,5o - практически постоянные погрешности за время посадки. Соответственно погрешности
Δ Н = Δ D sinα + ΔV L; Δ L = Δ D cosα - ΔV H, где L - горизонтальная дальность до ориентира;
Н - высота ЛА относительно ориентира, что, например, при L = 2000 v, Δ D = 5 м, сos α < 1, Н = 200 м составляет Δ L = 7 м, Δ Н = 25 м, что также практически не позволяет осуществить посадку.
Система, содержащая спутниковый датчик координат СДК, датчик полярных координат ориентира ДПКО, пульт управления ПУ с двумя выходами, выбирается в качестве прототипа [3]. Недостатком этой системы является наличие указанных погрешностей.
Цель изобретения - повышение точности информационного обеспечения режима посадки.
Это достигается тем, что в информационную систему посадки, содержащую последовательно соединенные пульт управления и датчик полярных координат ориентира, а также спутниковый датчик координат, дополнительно введены блок коррекции, блок формирования корректируемой дальности и блок формирования поправки, причем входы блока коррекции с первого по девятый соединены соответственно с выходом датчика полярных координат ориентира, с первым и вторым выходами спутникового датчика координат, с выходами с первого по четвертый блока формирования поправки и с первым и вторым выходами блока формирования корректируемой дальности, входы которого с первого по четвертый соединены соответственно с выходами с первого по четвертый блока коррекции, входы блока формирования поправки с первого по шестой соединены соответственно с пятым, шестым и вторым входами блока коррекции, выходом датчика полярных координат ориентира и вторым выходом пульта управления, при этом блок коррекции выполнен на основе шести блоков разности, причем первые входы первого и второго блоков разности объединены и являются первым входом блока коррекции, объединенные первые входы третьего и четвертого блоков разности являются его вторым входом, объединенные первые входы пятого и шестого блоков разности являются его третьим входом, вторые входы третьего, пятого, четвертого, шестого, второго и первого блоков разности являются соответственно входами блока коррекции с четвертого по девятый, соответственно выходами блока коррекции с первого по шестой являются выходы третьего, шестого, четвертого, пятого, первого и второго блоков разности.
Блок формирования корректируемой дальности выполнен на основе четырех квадраторов, двух сумматоров и двух блоков извлечения квадратного корня, причем первый и второй входы соответственно первого и второго сумматоров соединены с выходами первого и четвертого, второго и третьего квадраторов, выход первого сумматора через первый блок извлечения квадратного корня соединены с первым выходом блока формирования корректируемой дальности, выход второго сумматора соединен через второй блок извлечения квадратного корня с вторым выходом блока формирования корректируемой дальности, соответственно объединенные первый и второй входы квадраторов с первого по четвертый являются входами блока формирования корректируемой дальности с первого по четвертый, блок формирования поправок выполнен на основе десяти блоков умножения, шести блоков деления, пяти интеграторов, четырех блоков дифференцирования, двух блоков разности (седьмого и восьмого), двух сумматоров (третьего и четвертого), двух блоков весового суммирования, задатчика постоянных коэффициентов и текущего времени причем задатчик постоянных коэффициентов и текущего времени, первый интегратор, первый блок весового суммирования, первый блок умножения, первый блок деления, второй блок умножения, третий блок умножения и второй интегратор соединены последовательно, второй блок деления, первый блок дифференцирования, четвертый блок умножения, третий блок деления, пятый блок умножения, шестой блок умножения и третий интегратор соединены последовательно, четвертый блок деления, второй блок дифференцирования, выход которого соединен также с вторым входом первого блока умножения, третий блок дифференцирования, седьмой блок умножения и седьмой блок разности соединены последовательно, выход седьмого блока разности соединен с вторым входом третьего блока умножения, третий сумматор, первый вход которого соединен с вторым выходом задатчика постоянных коэффициентов и текущего времени, и восьмой блок умножения, второй вход которого соединен с выходом второго блока дифференцирования, а выход - с вторым входом седьмого блока разности, соединены последовательно, четвертый сумматор, первый вход которого соединен с третьим выходом задатчика постоянных коэффициентов и текущего времени, девятый блок умножения, второй вход которого соединен с выходом первого блока дифференцирования, и восьмой блок разности соединены последовательно, второй вход восьмого блока разности соединен с выходом второго блока деления, третий вход восьмого блока разности через последовательно соединенные четвертый блок дифференцирования и десятый блок умножения соединен с выходом первого блока дифференцирования, выход пятого блока деления соединен с вторым входом первого блока деления, выход шестого блока деления соединен с вторым входом третьего блока деления, выход пятого блока умножения соединен также с входом четвертого интегратора, выход второго блока умножения соединен с входом пятого интегратора, выход четвертого блока деления соединен с третьим входом седьмого блока разности, выход первого блока весового суммирования соединен также с вторым входом седьмого блока умножения, выход восьмого блока разности соединен с вторым входом шестого блока умножения, второй вход первого блока весового суммирования, второй вход третьего сумматора, второй вход четвертого сумматора и первый вход второго блока весового суммирования объединены и соединены с входом первого интегратора, третий вход первого блока весового суммирования соединен с четвертым выходом задатчика постоянных коэффициентов и текущего времени, второй вход второго блока весового суммирования соединен с пятым выходом задатчика постоянных коэффициентов и текущего времени, третий вход второго блока весового суммирования соединен с выходом первого интегратора, выход второго блока весового суммирования соединен с вторыми входами четвертого блока умножения и десятого блока умножения, при этом входами блока формирования поправок с первого по шестой являются соответственно второй вход второго блока умножения, второй вход пятого блока умножения, объединенные пеpвые входы второго, четвертого и шестого блоков деления, объединенные первый вход пятого блока деления, второй вход четвертого блока деления и второй вход второго блока деления, объединенные вторые входы пятого и шестого блоков деления и вход задатчика постоянных коэффициентов и текущего времени, выходами блока формирования поправки с первого по четвертый являются соответственно выходы пятого интегратора, второго интегратора, третьего интегратора и четвертого интегратора.
На фиг. 1 представлена структурная схема предлагаемой системы, содержащей спутниковый датчик координат СДК 1, датчик полярных координат ориентира ДПКО 2 с пультом управления ПУ 3, блок формирования поправок БФП 4, блок коррекции БК 5, блок формирования корректируемой дальности БФКД 6.
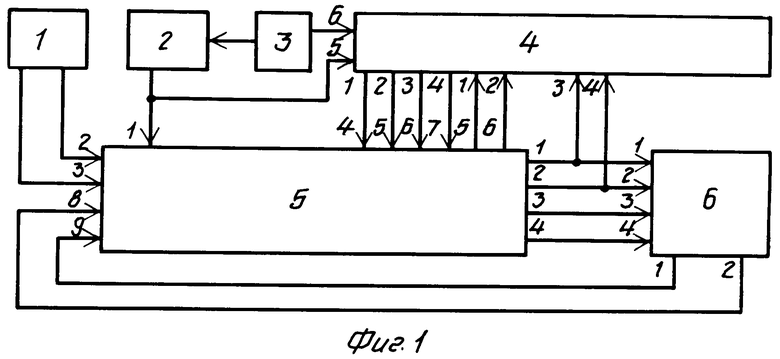
На фиг.2 - структурная схема БК 5, содержащего первый-шестой блоки разности БР1(1), БР2(12), БРЗ(7), БР4(8), БР5(9), БР6(10).
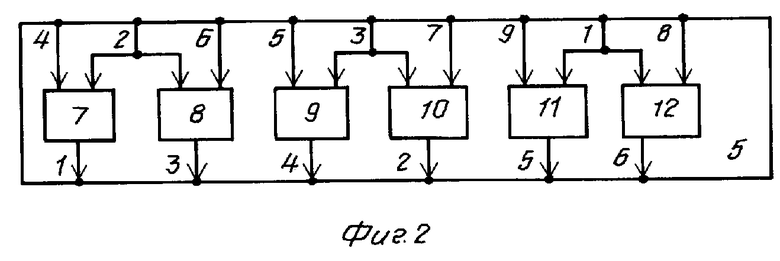
На фиг.3 - структурная схема БФКД6, содержащего первый-четвертый квадраторы К1(14), К2(15), К3(16), К4(13), первый и второй сумматоры СI(17), С2(18), первый и второй блоки извлечения корня квадратного БИКI(19), БИК2(20).
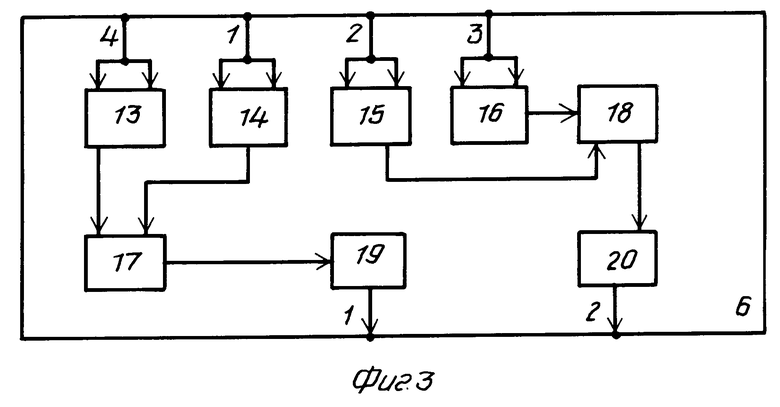
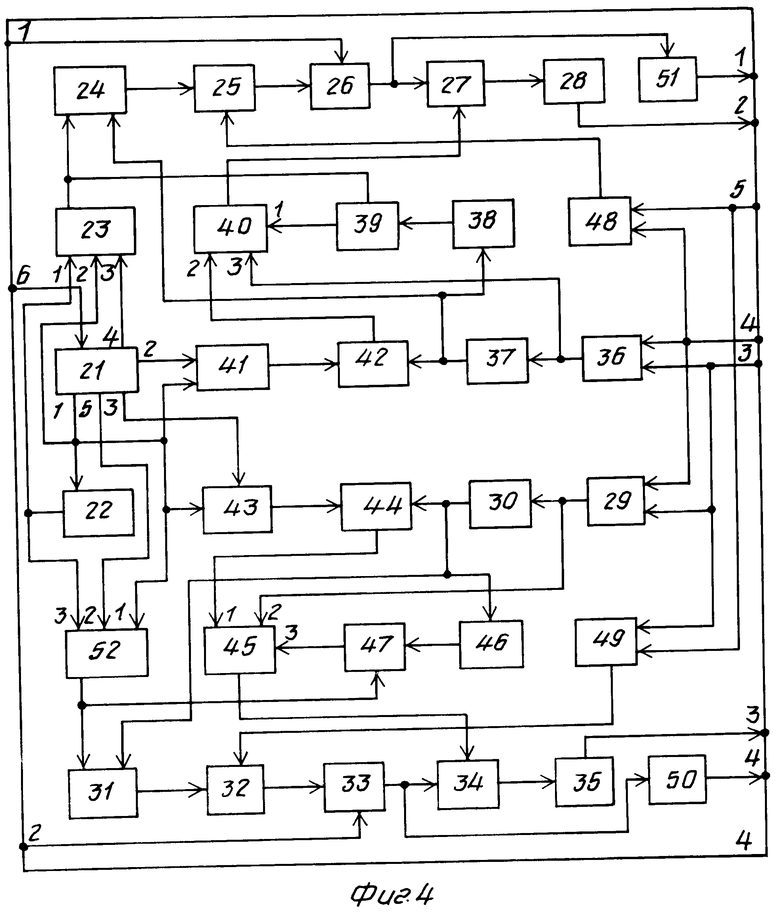
На фиг. 4 представлена структурная схема БФП4, содержащего первый-десятый блоки умножения БУI(24), БУ2(26), БУЗ(27), БУ4(31), БУ5(33), БУ6(34), БУ7(39), БУ8(42), БУ9(44), БУ10(47), первый-шестой элементы деления БДI(25), БД2(29), БД3(32), БД4(36), БД5(48), БД6(49), первый-пятый интеграторы И1(22), И2(28), И3(35), И4(50), И5(51), первый-четвертый блоки дифференцирования БДИI(30), БДИ2(37), БДИ3(38), БДИ4(46), первый и второй блоки весового суммирования БВС1(23), БВС2(52), третий и четвертый сумматоры С3(41), С4(43), седьмой и восьмой блоки разности БР7(40), БР8(45), задатчик постоянных коэффициентов и текущего времени ЗП(21).
Система работает следующим образом.
Подачей команды с одного выхода ПУ 3 летчик (оператор) наводит ДПКО 2 на ориентир, сигнал измеряемой дальности Дo = Д + Δ (Д - действительное значение дальности, Δ- постоянная погрешность) до ориентира с выхода ДПКО 2) поступает на первый вход БК 5 и на пятый вход БФА 4, после устойчивого наведения на ориентир летчик (оператор) с другого выхода ПУ 3 выдает команду (соответствующую началу совместной работы системы), поступающую на шестой вход БФП 4. СДК 1 измеряет текущие значения координат от ЛА от ориентира с известными координатами: высоту Нс = Н + Δ1 и горизонтальную дальность Lc = L + Δ2 (Lc, Нс - действительные значения координат; Δ1,Δ2- погрешности, практически постоянные за время процесса посадки 1-3 мин); сигналы Нс и Lc c одного и другого выходов СДК 1 поступают на второй и третий входы БК5, на четвертый - седьмой входы которого с первого-четвертого выходов БФП 4 поступают сигналы δ1 , δ2 , δ11 ,δ12, на восьмой и девятый вход БК 5 поступают сигналы Dk1 и Dk2 c первого и второго выходов БФКД (6).
В БК5 (см. фиг. 2) второй вход (сигнал Нс) подключен к одному входу БРЗ(7) и к одному входу БР4(8), третий вход (сигнал Lc) подключен к одному входу БР5(9) и к одному входу БР6(10), первый вход (сигнал Do) подключен к одному входу БРI(11) и к одному входу БР2(12), на другой вход которого подключен восьмой вход БК(5), в БР2(12) формируется сигнал Х2 = Dк2 - Do, поступающий на шестой выход БК5, на другой вход БРI(11) поступает сигнал Dк1 с девятого входа БК5, в БР1(11) формируется сигнал Х1 = Dк1 - Do, поступающий на пятый выход БК 5, на другой вход БР6(10) поступает сигнал δ21 с седьмого входа БК 5, в БР6(10) формируется сигнал Lк = Lc - δ21, поступающий на второй выход БК 5, с пятого входа БК 5 сигнал δ2поступает на другой вход БР5(9), где формируется сигнал Lк1 = Lc - δ2, поступающий на четвертый выход БК5 сигнал δ11 поступает на другой вход БР4(8), где формируется сигнал НК1 = Нс - δ11, поступающий на третий выход БК5, с четвертого выхода БК5 сигнал δ1поступает на другой вход БР3(7), где формируется сигнал Нк = Нс - δ1поступающий на первый выход БК5.
С пятого и шестого выходов БК5 сигналы Х1 и Х2 поступают соответственно на первый и второй выходы БФП 4, на третий и четвертый входы которого поступают соответственно сигналы Нк и Lк c первого и второго выходов БК 5, с третьего и четвертого выходов которого сигналы Нк1 и Lк1 поступают соответственно на третий и четвертый входы БФКД 6, на первый и второй входы которого поступают соответственно сигналы Нк и Lк c первого и второго выходов БК5.
В БФКД6 (см.фиг.3) первый вход (сигналы Нк) подключен к одному и другому входам К1(14), где формируется сигнал Н2К, поступающий на один вход C1(17); второй вход (сигнал Lк) подключен к одному и другому входам К2(15), где формируется сигнал L2к, поступающий на один вход С2(18);
третий вход (сигнал Нк1) подключен к одному и другому входам К3(16), где формируется сигнал Н2к1, поступающий на другой вход С2(18), где формируется сигнал D2к2 = H2к1 + L2к, поступающий на вход БИК2(20), где формируется сигнал DK2=  , поступающий на второй выход БФКД6; четвертый вход (сигнал Lк1) подключен к одному и другому входам К4(13), где формируется сигнал L2к1, поступающий на другой вход С1(17), где формируется сигнал D2к1 = Н2к + L2к1, поступающий на вход БИК1(19), где формируется сигнал DK1=
, поступающий на второй выход БФКД6; четвертый вход (сигнал Lк1) подключен к одному и другому входам К4(13), где формируется сигнал L2к1, поступающий на другой вход С1(17), где формируется сигнал D2к1 = Н2к + L2к1, поступающий на вход БИК1(19), где формируется сигнал DK1=  , поступающий на первый выход БФКД6.
, поступающий на первый выход БФКД6.
При этом имеют место следующие соответствующие при малых сигналах
Δ1 , Δ2 , δ1 , δ2 , δ11 , δ21 :
 (
(





(1)

(2)
X1= DK1-D0= (Δ1-δ1) ·  +(Δ2-δ2)·
+(Δ2-δ2)·  - Δ ,
- Δ ,
(3)
X2= DK2-D0= (Δ1-δ11) ·  +(Δ2-δ21)·
+(Δ2-δ21)·  - Δ
- Δ
(4)
В БФП 4 (см. фиг.4) первый вход (сигнал Х1) подключен к одному входу БУ2(26), на другой вход которого поступает сигнал F1 c выхода БД1(25), в БУ2(26) формируется сигнал Х1F1, поступающий на вход И5(51) и на один вход БУЗ(27), на другой вход которого поступает сигнал F2 с выхода БР7(40), в БУЗ(27) формируется сигнал х1 F1 F2 ,поступающий на вход И2(28), где соответственно формируется сигнал δ2=  X1F1F2dt (t - текущее время), поступающий на второй выход БФП4, в И5(51) формируется сигнал δ1=
X1F1F2dt (t - текущее время), поступающий на второй выход БФП4, в И5(51) формируется сигнал δ1=  X1F1dt , поступающий на первый выход БФП4; второй вход (сигнал Х2) подключен к одному входу БУ5(33), на другой вход которого поступает сигнал F21 с выхода БД3(32), в БУ5(33) формируется сигнал Х2.F21, поступающий на вход И4(50) и на один вход БУ6(34), на другой вход которого поступает сигнал F11 c выхода БР8(45), в БУ6(34) формируется сигнал Х2. F21.F11, поступающий на вход И3(35), где формируется сигнал δ11=
X1F1dt , поступающий на первый выход БФП4; второй вход (сигнал Х2) подключен к одному входу БУ5(33), на другой вход которого поступает сигнал F21 с выхода БД3(32), в БУ5(33) формируется сигнал Х2.F21, поступающий на вход И4(50) и на один вход БУ6(34), на другой вход которого поступает сигнал F11 c выхода БР8(45), в БУ6(34) формируется сигнал Х2. F21.F11, поступающий на вход И3(35), где формируется сигнал δ11=  X2F21F11dt , поступающий на третий выход БФП4, в И4(50) формируется сигнал δ21=
X2F21F11dt , поступающий на третий выход БФП4, в И4(50) формируется сигнал δ21=  X2F21dt , поступающий на четвертый выход БФП4.
X2F21dt , поступающий на четвертый выход БФП4.
По сигналу u, поступающему с шестого входа БФП4 на вход 3П(21), oн скачком выдает постоянные сигналы: b1 - c четвертого выхода поступает на третий вход БВС1(23), а1 - с второго выхода поступает на один вход С3(41), а2 - с третьего выхода поступает на один вход С4(43), b2 - с пятого выхода поступает на второй вход БВС2(52), сигнал текущего времени t, поступающий с первого выхода ЗП(21) на второй вход БВСI (23), на другой вход С3(41), на другой вход С4(43), на первый вход БВС2(52) и на вход И1(22), где формируется сигнал  =
=  tdt , который с выхода И1(22) поступает на третий вход БВС2(52) и на первый вход БВСI(23), где формируется суммарный весовой сигнал K1= b1+a1t +
tdt , который с выхода И1(22) поступает на третий вход БВС2(52) и на первый вход БВСI(23), где формируется суммарный весовой сигнал K1= b1+a1t +  (а1 - весовой коэффициент), поступающий на один вход БУI(24) и на один вход БУ7(39), в БВС 2(52) формируется суммарный весовой сигнал K2= b2+a2t +
(а1 - весовой коэффициент), поступающий на один вход БУI(24) и на один вход БУ7(39), в БВС 2(52) формируется суммарный весовой сигнал K2= b2+a2t +  (а2- весовой коэффициент), поступающий на один вход БУ4(31) и на один вход БУ10(47), в С3(41) формируется сигнал
(а2- весовой коэффициент), поступающий на один вход БУ4(31) и на один вход БУ10(47), в С3(41) формируется сигнал  = t+a1, поступающий на один вход БУ8(42), в С4(43) формируется сигнал
= t+a1, поступающий на один вход БУ8(42), в С4(43) формируется сигнал  = t + a2, поступающий на один вход БУ9(44).
= t + a2, поступающий на один вход БУ9(44).
Третий вход БФП4 (сигнал Нк) подключен к одним входам БД4(36), БД2(29) и БД6(49), четвертый вход БФП4 (сигнал Lк) подключен к одному входу БД5(48) и к другим входам БД2(29) и БД4(36), пятый вход БФП4(сигнал Do) подключен к другим входам БД6(49) и БД5(48), где формируется сигнал m1=  ≈
≈  поступающий на один вход БД1(25), в БД6(49) формируется сигнал m2=
поступающий на один вход БД1(25), в БД6(49) формируется сигнал m2=  ≈
≈  , поступающий на один вход БД3(32), в БД4(36) формируется сигнал n1=
, поступающий на один вход БД3(32), в БД4(36) формируется сигнал n1=  ≈
≈  , поступающий на третий вход БР7(40) и на вход БДИ2(37), где формируется производная входного сигнала
, поступающий на третий вход БР7(40) и на вход БДИ2(37), где формируется производная входного сигнала  , поступающая на вход БДИ3(38), на вход БУ8(42) и на другой вход БУ1(24), где формируется сигнал k
, поступающая на вход БДИ3(38), на вход БУ8(42) и на другой вход БУ1(24), где формируется сигнал k , поступающий на другой вход БД1(25), где формируется сигнал F1=
, поступающий на другой вход БД1(25), где формируется сигнал F1=  , поступающий на другой вход БУ2(26), в БУ8(42) формируется сигнал
, поступающий на другой вход БУ2(26), в БУ8(42) формируется сигнал  , поступающий на второй вход БР7(40); в БДИ3(38) формируется сигнал второй производной
, поступающий на второй вход БР7(40); в БДИ3(38) формируется сигнал второй производной  , поступающий на другой вход БУ7(39), где формируется сигнал
, поступающий на другой вход БУ7(39), где формируется сигнал  , поступающий на первый вход БР7(40), где формируется сигнал F2=
, поступающий на первый вход БР7(40), где формируется сигнал F2=  -k
-k -n1, поступающий на другой вход БУ3(27). В БД2(29) формируется сигнал n2=
-n1, поступающий на другой вход БУ3(27). В БД2(29) формируется сигнал n2=  ≈
≈  поступающий на второй вход БДИ1(30), где формируется сигнал производной
поступающий на второй вход БДИ1(30), где формируется сигнал производной  , поступающий на другой вход БУ9(44), на вход БДИ4(46) и на другой вход БУ4(31), где формируется сигнал
, поступающий на другой вход БУ9(44), на вход БДИ4(46) и на другой вход БУ4(31), где формируется сигнал  k2, поступающий на другой вход БД3(32), где формируется сигнал F21=
k2, поступающий на другой вход БД3(32), где формируется сигнал F21=  , поступающий на другой вход БУ5(33), в БДИ4(46) формируется сигнал второй производной
, поступающий на другой вход БУ5(33), в БДИ4(46) формируется сигнал второй производной  , поступающий на другой вход БУ10(47), где формируется сигнал k
, поступающий на другой вход БУ10(47), где формируется сигнал k , поступающий на третий вход БР8(45), в БУ9(44) формируется сигнал
, поступающий на третий вход БР8(45), в БУ9(44) формируется сигнал  , поступающий на первый вход БР8(45), где формируется сигнал F11=
, поступающий на первый вход БР8(45), где формируется сигнал F11=  -k
-k -n2, поступающий на другой вход БУ6(34).
-n2, поступающий на другой вход БУ6(34).
Так как  = X1· F1,
= X1· F1,  = X1F1F2, то в соответствии с зависимостью (3)
= X1F1F2, то в соответствии с зависимостью (3)
 = (Δ1-δ1)·n1+Δ2-
= (Δ1-δ1)·n1+Δ2- 
 F2dt-Δ·m1 при
F2dt-Δ·m1 при
F1=  , F2=
, F2=  n1-k
n1-k -n1,
-n1, k1+2
k1+2 +δ1= Δ1+
+δ1= Δ1+  -
-  , соответственно при
, соответственно при
k1= b1+a1t + 
(δ1k1)″ = Δ1+  -
-  .
.
Так как m1=  =
=  , n1=
, n1=  = tgα ( α - угол наклона траектории), то
= tgα ( α - угол наклона траектории), то =
=  ,
,  =
=  ,
,  = sinα =
= sinα =  , а так как при посадке sinα << 1 и поскольку Δ < Δ1 то Δ ·
, а так как при посадке sinα << 1 и поскольку Δ < Δ1 то Δ ·  ≪ Δ1 и (δ1k1)″ = Δ1+
≪ Δ1 и (δ1k1)″ = Δ1+  , откуда
, откуда
δ1=  ,
,
откуда видно, что со временем δ1_→ Δ1, при этом выбором постоянных а1 и b1 обеспечивается необходимые качество и время переходного процесса, после окончания которого δ1≈ Δ1 соответственно на выходе БР3(7) и не первом выходе БК5 будет сигнал Нк = Нс -δ1 ≈ Н, т.е. осуществляется коррекция высоты.
Так как  = X2F11F21,
= X2F11F21,  = X2·F21, то в соответствии с зависимостью (4)
= X2·F21, то в соответствии с зависимостью (4) =
=  = Δ1-
= Δ1- 
 F11dt+(Δ2-δ21)·n2-Δ·m2 при
F11dt+(Δ2-δ21)·n2-Δ·m2 при
F11=  -k
-k -n2, F21=
-n2, F21= 
 k2+2
k2+2 k2+δ21= Δ2+
k2+δ21= Δ2+  - Δ ·
- Δ ·  соответственно при
соответственно при
k2=  + a2t+b2
+ a2t+b2
(δ21k2)″ = Δ2+  -
-  , так как
, так как
m2=  , n2=
, n2=  или
или
m2=  , n2=
, n2=  ,
,  =
=  ,
, =
=  ,
,  = cosα ≈ 1,
= cosα ≈ 1,
(δ21k2)″ = Δ2-Δ-  ,
,
δ21=  ,
,
откуда следует, что со временем δ21 -> Δ2 - Δ выбором постоянных а2 и b2 обеспечивается качество и время переходного процесса, после окончания которого δ21 = Δ2 - Δ соответственно на выходе БР6(10) и втором выходе БК5 будет сигнал Lк = Lc-Δ2 + Δ = L + Δ , т.е. коррекция по горизонтальной дальности осуществляется с точностью Δ << Δ2 .
Таким образом повышается точность работы системы.
| название | год | авторы | номер документа |
|---|---|---|---|
| КОМПЛЕКСНАЯ СИСТЕМА НАВИГАЦИИ | 1992 |
|
RU2023983C1 |
| КОМПЛЕКСНАЯ СИСТЕМА НАВИГАЦИОННОГО ОБЕСПЕЧЕНИЯ ЗАХОДА НА ПОСАДКУ | 1992 |
|
RU2042923C1 |
| КОМПЛЕКСНАЯ ПРИЦЕЛЬНАЯ СИСТЕМА | 1999 |
|
RU2161777C1 |
| КОМПЛЕКСНАЯ СИСТЕМА НАВИГАЦИИ | 1998 |
|
RU2146803C1 |
| ИНФОРМАЦИОННАЯ СИСТЕМА МЕЖСАМОЛЕТНОЙ НАВИГАЦИИ | 1995 |
|
RU2089449C1 |
| СИСТЕМА УПРАВЛЕНИЯ ВЫСОТОЙ ПОЛЕТА | 1996 |
|
RU2093420C1 |
| КОМПЛЕКСНАЯ КУРСОВАЯ СИСТЕМА | 1996 |
|
RU2098322C1 |
| СИСТЕМА УПРАВЛЕНИЯ БОКОВЫМ ДВИЖЕНИЕМ ЛЕТАТЕЛЬНОГО АППАРАТА | 1996 |
|
RU2096263C1 |
| СИСТЕМА УПРАВЛЕНИЯ ВЫСОТОЙ ПОЛЕТА | 1994 |
|
RU2081396C1 |
| КОМПЛЕКСНАЯ НАВИГАЦИОННАЯ СИСТЕМА | 1992 |
|
RU2115890C1 |
Изобретение относится к авиационному приборостроению, в частности к информационным системам посадки летательных аппаратов. Целью изобретения является повышение точности информационного обеспечения режима посадки. Это достигается тем, что в информационную систему посадки введены блок коррекции, блок формирования корректируемой дальности и блок формирования поправок, что позволяет за счет наличия в системе спутникового датчика координат датчика полярных координат ориентира и определяемых пультом управления режимов захвата ориентира осуществлять точную коррекцию высоты и горизонтальной дальности. 4 ил.
ИНФОРМАЦИОННАЯ СИСТЕМА ПОСАДКИ, содержащая последовательно соединенные пульт управления и датчик полярных координат ориентира, а также спутниковый датчик координат, отличающаяся тем, что в нее введены блок коррекции, блок формирования корректируемой дальности и блок формирования поправки, причем входы блока коррекции с первого по девятый соединены соответственно с выходом датчика полярных координат ориентира, с первым и вторым выходами спутникового датчика координат, с выходами с первого по четвертый блока формирования поправки и с первым и вторым выходами блока формирования корректируемой дальности, входы которого с первого по четвертый, в свою очередь, соединены соответственно с выходами с первого по четвертый блока коррекции, входы блока формирования поправки с первого по шестой соединены соответственно с пятым, шестым, первым и вторым выходами блока коррекции, выходом датчика полярных координат ориентира и вторым выходом пульта управления, при этом блок коррекции выполнен на основе шести блоков разности, причем первые входы первого и второго блоков разности объединены и являются первым входом блока коррекции, объединенные первые входы третьего и четвертого блоков разности являются его вторым входом, объединенные первые входы пятого и шестого блоков разности являются его третьим входом, вторые входы третьего, пятого, четвертого, шестого, второго и первого блоков разности являются соответственно входами блока коррекции с четвертого по девятый, соответственно, выходами блока коррекции с первого по шестой являются выходы третьего, четвертого, пятого, шестого, первого и второго блоков разности, блок формирования корректируемой дальности выполнен на основе четырех квадраторов, двух сумматоров и двух блоков извлечения квадратного корня, причем первый и второй входы соответственно первого и второго сумматоров соединены с первым и четвертым, вторым и третьим квадраторами, выход первого сумматора через первый блок извлечения квадратного корня соединен с первым выходом блока формирования корректируемой дальности, выход второго сумматора соединен через второй блок извлечения квадратного корня с вторым выходом блока формирования корректируемой дальности, соответственно объединенные первый и второй выходы квадраторов с первого по четвертый являются входами блока формирования корректируемой дальности с первого по четвертый, блок формирования поправок выполнен на основе десяти блоков умножения, шести блоков деления, пяти интеграторов, четырех блоков дифференцирования, двух блоков разности, двух сумматоров, двух блоков весового суммирования, задатчика постоянных коэффициентов и текущего времени, причем задатчик постоянных коэффициентов и текущего времени, первый интегратор, первый блок весового суммирования, первый блок умножения, первый блок деления, второй блок умножения, третий блок умножения и второй интегратор соединены последовательно, второй блок деления, первый блок дифференцирования, четвертый блок умножения, третий блок деления, пятый блок умножения, шестой блок умножения и третий интегратор соединены последовательно, четвертый блок деления, второй блок дифференцирования, выход которого соединен также с вторым входом первого блока умножения, третий блок дифференцирования, седьмой блок умножения и седьмой блок разности соединены последовательно, выход седьмого блока разности соединен с вторым входом третьего блока умножения, третий сумматор, первый вход которого соединен с вторым выходом задатчика постоянных коэффициентов и текущего времени, и восьмой блок умножения, второй вход которого соединен с выходом второго блока дифференцирования, а выход - с вторым входом седьмого блока разности, соединены последовательно, четвертый сумматор, первый вход которого соединен с третьим выходом задатчика постоянных коэффициентов и текущего времени, девятый блок умножения, второй вход которого соединен с выходом первого блока дифференцирования, и восьмой блок разности соединены последовательно, второй вход восьмого блока разности соединен с выходом второго блока деления, третий вход восьмого блока разности через последовательно соединенные четвертый блок дифференцирования и десятый блок умножения соединен с выходом первого блока дифференцирования, выход пятого блока деления соединен с вторым входом первого блока деления, выход шестого блока деления соединен с вторым входом третьего блока деления, выход пятого блока умножения соединен также с входом четвертого интегратора, выход второго блока умножения соединен с входом пятого интегратора, выход четвертого блока деления соединен с третьим входом седьмого блока разности, выход первого блока весового суммирования соединен также с вторым входом седьмого блока умножения, выход восьмого блока разности соединен со вторым входом шестого блока умножения, второй вход первого блока весового суммирования, второй вход третьего сумматора, второй вход четвертого сумматора и первый вход второго блока весового суммирования объединены и соединены с входом первого интегратора, третий вход первого блока весового суммирования соединен с четвертым выходом задатчика постоянных коэффициентов и текущего времени, второй вход второго блока весового суммирования соединен с пятым выходом задатчика постоянных коэффициентов и текущего времени, третий вход второго блока весового суммирования соединен с выходом первого интегратора, выход второго блока весового суммирования соединен с вторыми входами четвертого блока умножения и десятого блока умножения, при этом входами блока формирования поправок с первого по шестой являются соответственно второй вход второго блока умножения, второй вход пятого блока умножения, объединенные первые входы второго, четвертого и шестого блоков деления, объединенные первый вход пятого блока деления, второй вход четвертого блока деления и второй вход второго блока деления, объединенные вторые входы пятого и шестого блоков деления и вход задатчика постоянных коэффициентов и текущего времени, выходами блока формирования поправок с первого по четвертый являются соответственно выходы пятого интегратора, второго интегратора, третьего интегратора и четвертого интегратора.
| Переносная печь для варки пищи и отопления в окопах, походных помещениях и т.п. | 1921 |
|
SU3A1 |
| Бортовой комплекс радиоэлектронного оборудования самолета "Ямал" | |||
| Эскизный проект, Московская область, г.Раменское РПКБ, 1991. | |||
