Изобретение относится к авиационному приборостроению, в частности, к системам информационного обеспечения межсамолетной навигации.
Известны системы информационного обеспечения межсамолетной навигации, в которых относительные координаты формируются на основе непосредственных измерений (Тарасов В.Г. Межсамолетная навигация. М. Машиностроение, 1983 г. ).
Определение относительных координат возможно на основе коррекции данных инерциальных датчиков координат от радионавигационных средств с осуществлением обмена и сравнения координат местоположения взаимодействующих самолетов (Боднер В.А. Приборы первичной информации. М. Машиностроение, 1881 г. ). В качестве прототипа выбирается система на стр.141, где в качестве корректирующего средства используется спутниковый датчик координат, а относительные координаты определяются посредством обмена и сравнения координат местоположения взаимодействующих самолетов. Данная система, структурная схема которой приведена на фиг. 1, содержит инерциальный датчик координат ИДК, спутниковый датчик координат СДК, блок коррекции БК, блок приема и передачи данных БППД.
ИДК формирует и передает на первый вход БК координаты местоположения x1и= x1+Δ1и (здесь x1 действительное значение, Δ1и погрешность). Погрешность Δ1и представляется в виде временного ряда.
Δ1и= ao+a1t+a2t2+...+amtm
где:
ai постоянные коэффициенты,
t время.
СДК формирует координаты местоположения x1c=x1+Δ1c
здесь  , Δ1 систематическая (близкая к постоянной) погрешность,
, Δ1 систематическая (близкая к постоянной) погрешность,  флюктуационная высокочастотная погрешность), которые с первого выхода СДК поступают на второй вход БК, на третий вход которого поступает разовый сигнал U1, свидетельствующий об исправности СДК и U1 0 при неисправности (отключении, сбое) СДК.
флюктуационная высокочастотная погрешность), которые с первого выхода СДК поступают на второй вход БК, на третий вход которого поступает разовый сигнал U1, свидетельствующий об исправности СДК и U1 0 при неисправности (отключении, сбое) СДК.
В БК осуществляется комплексная обработка координат x1n с ИДК и x1c с СДК. Формируется сигнал откорректированной координаты
здесь
Г1=Г1(Р), Г2=Г2(Р) передаточные функции; Р оператор дифференцирования.
При Г2 1+С1Р+С2Р2+.+См+1Рm+1
Г1 1+С1Р+С2Р2+.+СmРm
откуда следует, что при обеспечении устойчивости и качества переходных процессов, по их окончании, при соответствующих коэффициентах С2 высокочастотная погрешность  подавляется до любой близкой к нулю величины, погрешность Δ1и компенсируется и x1к_→ x1+Δ1 т.е. коррекция осуществляется с точностью до Δ1 систематической погрешности СДК. Сигнал x1k с первого выхода СДК поступает на один выход БППД и с его одного выхода передается в систему взаимодействующего самолета, где аналогично формируется сигнал откорректированной координаты x2k= x2+Δ2 (здесь Δ2 систематическая погрешность СДК взаимодействующего самолета), поступающий на другой вход БППД и с его другого выхода поступает на четвертый вход БК, где формируется сигнал относительной координаты xок= x1k-x2k= xo+Δ1-Δ2 который со второго выхода БК выдается потребителям (в систему управления, на индикацию экипажу) для осуществления межсамолетной навигации. Поскольку СДК взаимодействующих самолетов в районе действий могут работать от различных комбинаций спутников (особенно при эволюциях), то погрешности Δ1 и Δ2 являются независимыми величинами и среднеквадратическая погрешность
подавляется до любой близкой к нулю величины, погрешность Δ1и компенсируется и x1к_→ x1+Δ1 т.е. коррекция осуществляется с точностью до Δ1 систематической погрешности СДК. Сигнал x1k с первого выхода СДК поступает на один выход БППД и с его одного выхода передается в систему взаимодействующего самолета, где аналогично формируется сигнал откорректированной координаты x2k= x2+Δ2 (здесь Δ2 систематическая погрешность СДК взаимодействующего самолета), поступающий на другой вход БППД и с его другого выхода поступает на четвертый вход БК, где формируется сигнал относительной координаты xок= x1k-x2k= xo+Δ1-Δ2 который со второго выхода БК выдается потребителям (в систему управления, на индикацию экипажу) для осуществления межсамолетной навигации. Поскольку СДК взаимодействующих самолетов в районе действий могут работать от различных комбинаций спутников (особенно при эволюциях), то погрешности Δ1 и Δ2 являются независимыми величинами и среднеквадратическая погрешность  соответственно при Δ2 = Δ1= Δ, σ = 1,4Δ что при Δ 30-100 м составляет s 40-140 м. Наличие такие погрешностей является недостатком системы-прототипа, так как существенно затрудняет выполнение полетов в плотных строях.
соответственно при Δ2 = Δ1= Δ, σ = 1,4Δ что при Δ 30-100 м составляет s 40-140 м. Наличие такие погрешностей является недостатком системы-прототипа, так как существенно затрудняет выполнение полетов в плотных строях.
Технико-экономическим эффектом, достигаемым при использовании предлагаемого технического решения, является повышение точности формирования относительных координат взаимодействующих самолетов, выполняющих групповые полеты.
Это достигается тем, что в информационную систему межсамолетной навигации, содержащую инерциальный датчик координат, спутниковый датчик координат, блок приема и передачи данных, первый блок коррекции, на первый, второй, третий и четвертый входы которого подключены соответственно выход инерциального датчика координат, первый и второй выходы спутникового датчика координат, первый выход блока приема и передачи данных, на первый вход которого подключен первый выход блока коррекции, дополнительно введены второй блок коррекции, n-ый блок коррекции и блок оптимальной обработки информации, на первый, второй, n-ый, (n+1)-ый, (n+2)-ой входы которого подключены соответственно вторые входы первого блока коррекции, второго блока коррекции, n-ого блока коррекции, второй выход спутникового датчика координат, (n+1)-ый выход блока приема и передачи данных, на второй, n-ый, (n+1)-ый входы которого подключены первые выходы второго блока коррекции, n-ого блока коррекции, второй выход спутникового датчика координат, первый выход которого подключен ко вторым входам второго блока коррекции, n-ого блока коррекции, причем выход инерциального датчика координат подключен к первым входам второго блока коррекции, n-ого блока коррекции, да третьи и четвертые входы которых подключены соответственно второй выход спутникового датчика координат и второй, n-ый выходы блока приема и передачи данных.
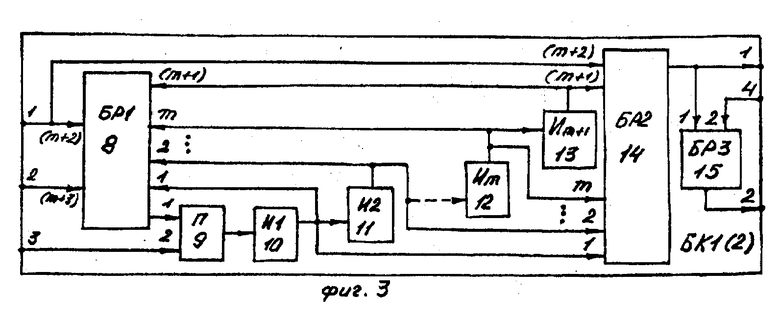
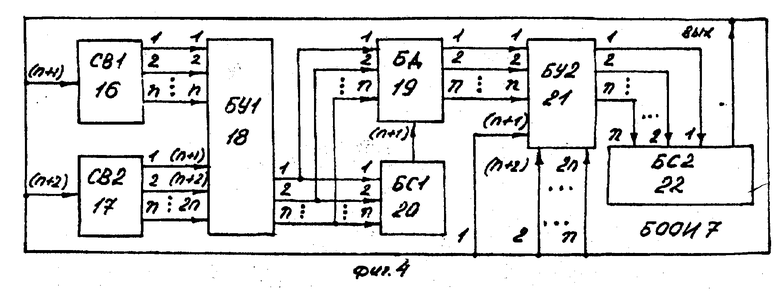
На фиг.1 представлена блок-схема прототипа, обозначения блоков приведены выше; на фиг. 2 блок-схема предлагаемой системы, содержащей: 1 спутниковый датчик координат СДК, 2 первый блок коррекции БК1, 3 инерциальный датчик координат ИДК, 4 блок приема и передачи данных БППД, 5 второй блок коррекции БК2, 6 n-ый блок коррекции БК, 7 блок оптимальной обработки информации БООИ; на фиг. 3 представлена блок-схема БК1(2), содержащего: 8 - первый блок разности БР1, 9 переключатель П, 10 первый интегратор И1, 11 - второй интегратор И2, 12 n-ный интегратор Иm, 13 (m+1)-ый интегратор Иm+1, 14 второй блок разности БР2, 15 третий блок разности БР3; на фиг.4 представлена блок-схема БООИ7, содержащего: 16 первый счетчик времени СВ1, 17 второй счетчик времени СВ2, 18 первый блок умножения БУ1, 19 блок деления БД, 20 первый блок суммирования БС1, 21 - второй блок умножения БУ2, 22 второй блок суммирования БС2.
Система работает следующим образом.
С выхода ИДК3 сигнал измеренной координаты x1и= x1+Δ1и (здесь x1 - действительное значение координаты, погрешность Δ1и= ao+a1t+...+amtm ai постоянные коэффициенты, t время) поступает на первые входы БК1(2), БК2(5), БКп(6). В районе действия имеется "n" возможных комбинаций спутников, по которым в СДК1 формируются координаты местоположения x1ec (здесь e - конкретная комбинация из "n" возможных). С первого выхода СДК1 сигнал  (здесь Δ1e близкая к систематической погрешность, соответствующая комбинации "e",
(здесь Δ1e близкая к систематической погрешность, соответствующая комбинации "e",  высокочастотная флюктуационная погрешность) поступает на вторые входы БК1(2), БК2(5), БК(6). Разовый сигнал U1e (с уровнями U11, U12, U1n), свидетельствующий о работе СДК1 по конкретной комбинации "e" из "n" возможных (при этом U1e+U0 - отказ или отключение СДК1) со второго выхода СДК1 поступает на третьи входы БК1(2), БК2(5), БК(6).
высокочастотная флюктуационная погрешность) поступает на вторые входы БК1(2), БК2(5), БК(6). Разовый сигнал U1e (с уровнями U11, U12, U1n), свидетельствующий о работе СДК1 по конкретной комбинации "e" из "n" возможных (при этом U1e+U0 - отказ или отключение СДК1) со второго выхода СДК1 поступает на третьи входы БК1(2), БК2(5), БК(6).
В БК1(2) (см. фиг. 3) первый вход подключен к (m+2)-ому входу БР1(8), второй входы подключен к (m+3)-ему входу БР1(8), на первый, второй, (m+1)-ый входы которого подключены соответственно сигналы "ym" с выхода И1(10), "ym-1" с выхода И2(11), " " с выхода Иm(12), "y" с выхода Иm+1(13). Блоки И1(10), И2(11), Иm(12), Иm+1(13) являются интеграторами.
" с выхода Иm(12), "y" с выхода Иm+1(13). Блоки И1(10), И2(11), Иm(12), Иm+1(13) являются интеграторами.
В БР1(8) формируется сигнал
(здесь
di постоянные коэффициенты усиления), поступающий на первый вход П9, на второй вход которого с третьего выхода БК1(2) поступает разовый сигнал U1e. П9 является двухпозиционным релейным элементом, подключающим свой первый вход (сигнал y0) к выходу при U11≅U1e≅U12 (т.е. при уровне U11) и при всех остальных уровнях U1e сигнал на выходе П9 y01=0. таким образом, при U1e=U11, e 1, y01=y0, а так как y01=y(m+1), то 
соответственно при 
 на выходе Иm+1(13) будет сигнал
на выходе Иm+1(13) будет сигнал
(здесь P оператор дифференцирования).
На первый, второй, m-ый, (m+1)-ый, (m+2)-ой входы БР2(4) поступают соответственно сигналы  y с выходов И1(10), И2(11), Иm(12), Иm+1(13) и сигнал x14 с первого входа БК1(2).
y с выходов И1(10), И2(11), Иm(12), Иm+1(13) и сигнал x14 с первого входа БК1(2).
В БР2(14) формируется корректируемая координата
здесь Г2= 1+С1Р+. +СmРm+1, откуда видно, что по окончании переходного процесса погрешность
Δ1и= ao+a1t+...+amtm
компенсируется, высокочастотная погрешность  подавляется до любой близкой к нулю величине, а
подавляется до любой близкой к нулю величине, а  т.е. коррекция осуществляется с точностью до близкой к систематической погрешности СДК1, тогда x11k= x1+Δ11+δ11 (здесь δ11 (0,05-0,1) Δ11 погрешность компенсации).
т.е. коррекция осуществляется с точностью до близкой к систематической погрешности СДК1, тогда x11k= x1+Δ11+δ11 (здесь δ11 (0,05-0,1) Δ11 погрешность компенсации).
При переходе работы СДК1 на другую комбинацию "e" (U1e≠U11) или отключении СДК1 (U1e= U0) на второй вход П9 поступает сигнал U1e=U11, при этом y01= 0, на выходах И1(10), И2(11), Иm(12), Иm+1(13) запоминаются ym, ym+1,  y соответствующие моменту изменения U1e в БР2(14) осуществляется коррекция x1и по запомненным значениям ym, y(m-1),
y соответствующие моменту изменения U1e в БР2(14) осуществляется коррекция x1и по запомненным значениям ym, y(m-1),  , y и сигнал на выходе БР2(14) x1k= x1+Δ11+δ113 здесь δ113 (0,05-0,1) Δ11 погрешность компенсации.
, y и сигнал на выходе БР2(14) x1k= x1+Δ11+δ113 здесь δ113 (0,05-0,1) Δ11 погрешность компенсации.
Сигнал x1k поступает на первый выход БК1(2) и на первый вход БР3(15).
С первого выхода БК1(2) сигнал x1k поступает на первый вход БППД4, являющегося, например, радиотехническим приемо-передатчиком.
С (n+2)-ого выхода БППД4 сигнал x1k поступает в аналогичную систему второго взаимодействующего самолета.
При работе СДК1 в разное время по различным комбинациям e≠1 коррекция x1u осуществляется в одном из блоков БК2(5), БК(6), на первых выходах которых формируются сигналы откорректированных координат x12К, x13К, x1nК, поступающих соответственно на второй, n-ый входы БППД4, с (n+3)-его, (2n+1)-ого выходов которого эти сигналы передаются в систему второго взаимодействующего самолета. Сигнал U1e со второго выхода СДК1 поступает на (n+1)-ый вход БООИ7 и на (n+1)-ый вход БППД4, с (2n+2)-ого выхода которого этот сигнал передается в систему взаимодействующего самолета, в которой аналогичным образом сформированные сигналы x21К, x22К, x2nК, U2e передаются на (n+2)-ой входы БППД4, с первого, второго, -ого выходов которого сигналы x21К, x22К, x1К поступают соответственно на четвертые входы БК1(2), БК2(5), БК (6), и сигнал U2e с (n+1)-ого выхода БППД(4) поступает на (n+2)-ой вход БООИ7.
С четвертого входа БК1(2) сигнал x21K= x2+Δ21+δ21 (здесь Δ21 близкая к систематической погрешности), δ21 (0,05-0,1) Δ21 (0,05-0,1) погрешность компенсации) поступает на второй вход БР3(15), где формируется сигнал относительной координаты первого самолета относительно второго
x011= x11K-x21K= x1-x2+δ11-δ21
Так как погрешности δ11 и δ21 являются случайными по величине и знаку в диапазоне (0,05-0,1)Δ11 и независимыми, то среднеквадратическая погрешность  x011= x0+σ11 где x0 действительное значение относительной координаты.
x011= x0+σ11 где x0 действительное значение относительной координаты.
Сигнал x011 с выхода БР3(15) поступает на второй выход БК1(2), откуда он поступает на первый вход БООИ7.
В КБ2(5), БК(6) аналогичным образом формируют относительные координаты x012= xo+σ12,..., x01n=xo+σ1n (здесь  поступающие на второй, n-ый входы БООИ7.
поступающие на второй, n-ый входы БООИ7.
В БООИ7 (см. фиг.4) первый, второй, n-ый входы (сигналы x011, x012, x01) подключены к (n+1)-ому, (n+2)-ому, 2 n-ому входам БУ2(21). С (n+1)-ого входа БООИ7 сигнал "U1e поступает вход СВ1(16), где на "n" элементах расчета времени формируются величины, пропорциональные временам коррекции τ11= ∫ U11dt (интегрируется сигнал уровня U11), τ12= ∫ U12dt,..., τ1n= ∫ U1ndt которые с первого, второго, n-ого выходов СВ1(16) поступают на первый, второй, n-ый входы БУ1(18). С (n+2)-ого входа БООИ7 сигнал U2e поступает на вход СВ2(17), где по аналогии с СВ1(16) формируются сигналы τ21= ∫ U21dt (интегрируется сигнал уровня U21), τ22= ∫ U22dt τ2n= ∫ U2ndt которые с первого, второго, -ого выходов СВ2(17) поступают соответственно на (n+1)-ый, (n+2)-ой, 2 n-ый входы БУ1(18), в котором на "n" элементах умножения формируются сигналы τ11•τ21, τ12•τ22,..., τ1n•τ2n которые с первого, второго, n-ого выходов БУ1(18) поступают на первый, второй, n-ый входы БД19 и на первый, второй, n-ый входы БС1(20), где формируется суммарный сигнал
Σ = τ11•τ21+τ12•τ22+...+ τ1n•τ2n
который с выхода БС1(20) поступает на (n+1)-ый вход БД19, в котором на "n" элементах деления формируются сигналы весовых коэффициентов  которые с первого, второго, n-ого выходов БД19 поступают соответственно на первый, второй, n-ый входы БУ2(21), где на "n" элементах умножения формируются сигналы l11•x011, λ12•x012,..., λ1n•x01n которые с первого, второго, n-ого выходов БУ2(21) поступают соответственно на первый, второй, n-ый входы БС2(22), где формируется оптимально осредненный сигнал относительной координаты
которые с первого, второго, n-ого выходов БД19 поступают соответственно на первый, второй, n-ый входы БУ2(21), где на "n" элементах умножения формируются сигналы l11•x011, λ12•x012,..., λ1n•x01n которые с первого, второго, n-ого выходов БУ2(21) поступают соответственно на первый, второй, n-ый входы БС2(22), где формируется оптимально осредненный сигнал относительной координаты
При независимых, случайных и равных по величине значениях среднеквадратическая погрешность
среднеквадратическая погрешность  соответственно при n=9,
соответственно при n=9,  3, Δ11 30-100 м, будет σ01 0,7-5 м, что значительно меньше, чем в системе-прототипе. Сигнал
3, Δ11 30-100 м, будет σ01 0,7-5 м, что значительно меньше, чем в системе-прототипе. Сигнал  с выхода БООИ7 выдается потребителям (в систему управления, на индикацию экипажу) для осуществления межсамолетной навигации.
с выхода БООИ7 выдается потребителям (в систему управления, на индикацию экипажу) для осуществления межсамолетной навигации.
В системе взаимодействующего самолета с использованием поступивших сигналов x11К, x12К, x1nК, U1e, аналогичным образом формируется сигнал относительной координаты  (здесь среднеквадратическая погрешность σ02 0,7-5 м), используется для осуществления межсамолетной навигации этого самолета относительно первого.
(здесь среднеквадратическая погрешность σ02 0,7-5 м), используется для осуществления межсамолетной навигации этого самолета относительно первого.
| название | год | авторы | номер документа |
|---|---|---|---|
| ИНФОРМАЦИОННАЯ СИСТЕМА ПОСАДКИ | 1992 |
|
RU2023984C1 |
| КОМПЛЕКСНАЯ СИСТЕМА НАВИГАЦИИ | 1992 |
|
RU2023983C1 |
| КОМПЛЕКСНАЯ КУРСОВАЯ СИСТЕМА | 1996 |
|
RU2098322C1 |
| КОМПЛЕКСНАЯ СИСТЕМА НАВИГАЦИОННОГО ОБЕСПЕЧЕНИЯ ЗАХОДА НА ПОСАДКУ | 1992 |
|
RU2042923C1 |
| ИНФОРМАЦИОННАЯ СИСТЕМА ФОРМИРОВАНИЯ АБСОЛЮТНОЙ ВЫСОТЫ | 1994 |
|
RU2085851C1 |
| СИСТЕМА УПРАВЛЕНИЯ ВЫСОТОЙ ПОЛЕТА ПРИ ПОСАДКЕ | 1996 |
|
RU2102281C1 |
| КОМПЛЕКСНАЯ ИНЕРЦИАЛЬНАЯ СИСТЕМА | 1996 |
|
RU2089450C1 |
| КОМПЛЕКСНАЯ СИСТЕМА ФОРМИРОВАНИЯ ВОЗДУШНЫХ ПАРАМЕТРОВ | 1998 |
|
RU2146805C1 |
| КОМПЛЕКСНАЯ НАВИГАЦИОННАЯ СИСТЕМА | 2000 |
|
RU2168704C1 |
| КОМПЛЕКСНАЯ СИСТЕМА НАВИГАЦИИ | 1998 |
|
RU2146803C1 |

Изобретение относится к авиационному приборостроению, в частности к системам, формирующим относительные координаты для обеспечения групповых действий летательных аппаратов. Сущность: информационная система, содержит спутниковый датчик координат, инерциальный датчик координат, блок приема и передачи данных, первый ... n-ый блоки коррекции, блок оптимальной обработки информации обеспечивает коррекцию от спутникового датчика координат при множестве "n" возможных комбинаций спутников в районе действий, тогда при взаимодействии с системой другого летательного аппарата в погрешности относительных координат отсутствует систематическая составляющая. Множество оценок относительных координат осредняется в дополнительно введенном блоке оптимальной обработки информации, в котором формируются относительные координаты. 1 з.п. ф-лы, 4 ил.
| Боднер В.А | |||
| Приборы первичной информации | |||
| - М.: Машиностроение, 1981, с | |||
| Топливник с глухим подом | 1918 |
|
SU141A1 |
