Изобретение относится к устройствам для внутритрубных обследований трубопроводов, рассчитанным на перемещение по обследуемому трубопроводу потоком транспортируемого по нему продукта, и может быть использовано для контроля технического состояния трубопроводов, предназначенных преимущественно для дальней транспортировки нефтепродуктов и природного газа.
Наиболее близким аналогом предлагаемого в настоящей заявке дефектоскопа-снаряда является устройство [1] которому присущи недостатки, снижающие их дефектоскопическую эффективность.
Кроме того, дефектоскоп-снаряд перекрывает всю площадь поперечного сечения обследуемых трубопроводов, в связи с чем может перемещаться только со скоростью транспортируемого по ним продукта. Следствием этого является дополнительное снижение дефектоскопической эффективности обследования магистральных газопроводов, т.к. оптимальные (с точки зрения эффективности обнаружения дефектов) скорости перемещения магнитных дефектоскопических блоков лежат в пределах от 1 до 3 м/с, а скорости перекачиваемого по магистральным газопроводам газа имеют от 8 до 15 м/с.
Задачей настоящего изобретения является создание дефектоскопа-снаряда для внутритрубных обследований трубопроводов, лишенного отмеченных недостатков и обладающего повышенной дефектоскопической эффективностью.
Это достигается благодаря тому, что дефектоскоп-снаряд для внутритрубных обследований трубопроводов, рассчитанный на размещение и перемещение в обследуемом трубопроводе потоком транспортируемого по нему продукта, содержащий цилиндрическое основание с опорными узлами для его соосного размещения в трубопроводе, закрепленные на основании блок-привод продольного перемещения, блок энергоснабжения, блок регистрации информации и дефектоскопический блок с узлами намагничивания стенок трубопровода в виде магнитов (электромагнитов) с обращенными к внутренней поверхности трубопровода полюсами и размещенными между полюсами магнитов многозвенными магниточувствительными преобразователями для фиксации магнитных потоков рассеяния от дефектов в стенках трубопровода, отличающийся тем, что основание в нем выполнено в виде байпасного патрубка для перепуска транспортируемого по трубопроводу продукта, дополнительно введена система автоматического регулирования скорости перемещения, содержащая блок управлениия с задатчиком скорости перемещения дефектоскопа-снаряда, подключенный ко входу блока управления датчик скорости перемещения дефектоскопа-снаряда и подключенный к выходу блока управления регулирующий орган в виде закрепленного на основании и предназначенного для взаимодействия со стенкой трубопровода тормозного устройства, образованного кольцевым многосекционным электромагнитом с обмотками и щеточными полюсами, обращенными к внутренней поверхности трубопровода и разнесенными по оси электромагнита, а дефектоскопический блок выполнен в виде двух разнесенных по оси трубопровода модулей, в одном из которых, далее именуемым кольцевым, в качестве узла намагничивания использована одна из секций электромагнита тормозного устройства, обмотка которой подключена к блоку энергоснабжения обособленно от обмоток других секций электромагнита, подключенных к выходу блока управления, а во втором модуле дефектоскопического блока, далее именуемом ротор, полюса магнитов (электромагнитов) разнесены по поперечному периметру трубопровода, а магниты равномерно размещены на роторе, расположенном на основании соосно с ним с возможностью вращения вокруг своей оси и соединенном с приводом вращения, при этом звенья преобразователя в кольцевом модуле расположены между полюсами указанной секции электромагнита тормозного устройства равномерно по всему поперечному периметру трубопровода, а звенья преобразователей в роторном модуле расположены между полюсами магнитов по параллельным образующим трубопровода.
Кроме того, для обеспечения сплошного сканирования всей внутренней поверхности трубопровода длина преобразователей в роторном модуле должна отвечать условию, выраженному соотношением:
где lпр длина преобразователя,м,
K>1 коэффициент запаса, необходимый для обеспечения сплошного сканирования поверхности тубопровода на криволинейный участках,
π = 3,14
D диаметр трубопровода, м,
n число преобразователей (и магнитов),
v- и v┴ соответственно продольная и поперечная (окружная) скорость перемещения преобразователя, м/с.
Привод вращения ротора в роторном модуле дефектоскопического блока может быть выполнен в виде закрепленных на роторе и контактирующих с внутренней поверхностью трубопровода подпружиненных колес, расположенных с возможностью свободного вращения вокруг осей, образующих заданный угол с образующими трубопровода.
В частности указанный угол поворота осей колес привода вращения ротора целесообразно принять равным 45o относительно образующих трубопровода. При этом обеспечивается равенство продольной и поперечной скорости перемещения преобразователей и одинаковая чувствительность к продольным и поперечным дефектам в стенке трубопровода.
Блок энергоснабжения может быть выполнен состоящим из двух модулей, размещенных соответственно на роторе и на основании, причем первый из указанных модулей может быть выполнен в виде электрогенератора, статор которого жестко закреплен на роторе, а якорь кинематически связан посредством редуктора с шестерней, охватывающей основание и жестко закрепленной на нем.
Блок регистрации может быть выполнен состоящим из двух модулей, один из которых размещен на основании и злектрически связан с выходами звеньев преобразователей, расположенных на кольцевом модуле дефектоскопического блока, а второй расположен на роторе и электрически связан с выходами звеньев преобразователей, расположенных на роторном модуле дефектоскопического блока.
Далее изобретение поясняется чертежами.
На фиг.1 приведена конструктивная схема заявляемого дефектоскопа-снаряда (в виде продольного разреза).
На фиг.2 показано поперечное сечение А-А дефектоскопа-снаряда посередине длины преобразователей, размещенных на роторном модуле дефектоскопического блока.
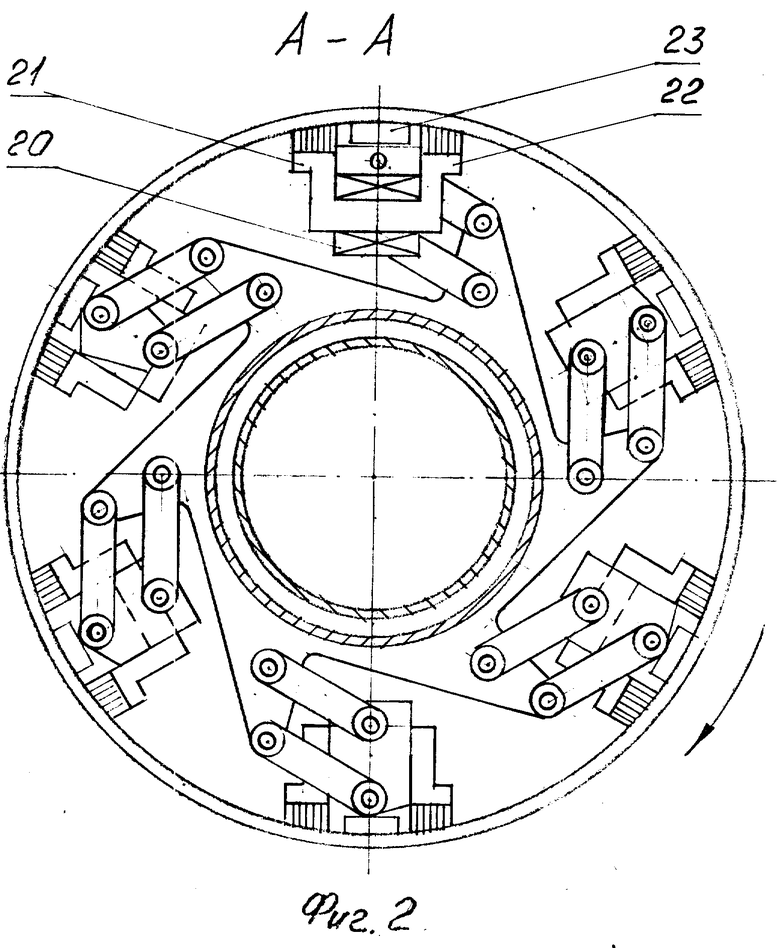
На фиг.3 приведена расчетная схема для вывода соотношения, определяющего необходимую протяженность преобразователей, размещаемых на роторном модуле дефектоскопического блока.
В соответствии с ранее изложенным дефектоскоп-снаряд содержит размещаемые в обследуемом трубопроводе 1 расположенные на цилиндрическом основании 2, опирающемся на внутреннюю поверхность трубопровода посредством опорных колес 3, блок-привод продольного перемещения в виде упругой манжеты 4, блок энергоснабжения, состоящий из электрогенератора 5 и батареи 6, аккумуляторов, блок регистрации, состоящий из двух модулей 7 и 8, систему автоматического регулирования скорости перемещения, состоящую из датчика дефектоскопа-снаряда скорости перемещения 9, блока 10 управления и регулирующего органа в виде тормозного устройства 11, образованного двухсекционным кольцевым электромагнитом с кольцевыми щеточными полюсами 12 и 1З и кольцевыми обмотками 14 и 15, а также дефектоскопический блок, состоящий из кольцевого модуля, в качестве намагничивающего узла которого использована секция электромагнита тормозного устройства с обмоткой 14 и кольцевыми полюсами 12, между которыми по всему поперечному периметру трубопровода размещен многозвенный преобразователь 16, а также роторного модуля, образованного установленным на основании 2 с возможностью вращения вокруг оси ротором 17, снабженным приводом вращения в виде косо расположенных подпружиненных колес 18, а также размещенными на роторе с возможностью радиального перемещения намагничивающими узлами 19, выполненными в виде электромагнитов с обмотками 20 и разнесенными по поперечному периметру трубопровода полюсами 21 и 22, между которыми установлены преобразователи 23. Кроме того, на роторе 17 установлены электрогенератор 5, якорь которого кинематически связан с неподвижной шестерней 24, закрепленной на основании 2 посредством редуктора 25, а также модуль 7 блока регистрации.
Работает дефектоскоп-снаряд следующим образом.
Для его ввода в обследуемый трубопровод и извлечения из трубопровода последний должен быть оснащен специальными камерами со шлюзовыми устройствами.
После ввода дефектоскопа-снаряда в трубопровод под действием перепада давления, образующегося при прохождении транспортируемого продукта через байпасный патрубок, дефектоскопа-снаряд начинает перемещаться вдоль трубопровода. При этом на выходе датчика скорости перемещения 9 вырабатывается сигнал, пропорциональный скорости перемещения, который вводится в блок управления 1О, где сравнивается с сигналом задатчика скорости, в результате чего на выходе блока управления изменяется величина тока, пропускаемого по обмотке 15 электромагнита тормозного устройства 11, таким образом, что в случае, если скорость перемещения дефектоскопа-снаряда меньше заданной, ток в обмотке электромагнита, а следовательно, и развиваемое им тормозное усилие уменьшаются, и наоборот, при скорости перемещения дефектоскопа-снаряда, превышающей заданную, ток в обмотке злектромагнита и тормозное усилие увеличиваются. Таким образом обеспечивается стабилизация скорости перемещения дефектоскопа-снаряда на заданном уровне, который выбирается равным оптимальному значению скорости в пределах от 1 до 3 м/с. Это позволяет получить наилучшее отношение сигнал/помеха на выходе преобразователей. Кроме того, ограничение скорости перемещения дефектоскопа-снаряда на указанном уровне при обследовании газопроводов резко снижает динамические нагрузки, воздействующие на элементы дефектоскопа-снаряда и трубопровода, что повышает их надежность.
В процессе перемещения дефектоскопа-снаряда по трубопроводу намагничивающие узлы дефектоскопического блока производят последовательное намагничивание участков стенок трубопровода до состояния технического насыщения. При этом стенки трубопровода вначале намагничиваются в поперечном направлении (намагничивающими узлами, расположенными на роторном модуле), а затем в продольном направлении (намагничивающим узлом кольцевого модуля). При наличии в стенке трубопровода дефекта в виде локального уменьшения ее толщины вблизи поверхности стенки трубопровода (как внешней, так и внутренней) образуется магнитный поток рассеяния, интенсивность которого зависит от конфигурации и размеров дефекта, а также его ориентации по отношению к направлению намагничивания стенок трубопровода. В общем случае интенсивность потока рассеяния от дефектов в стенках трубопровода тем больше, чем больше возмущающее воздействие дефекта на основной магнитный поток в стенке трубопровода, т.е. чем больше вносимое дефектом добавочное магнитное сопротивление. Поэтому продольноориентированные протяженные дефекты не будут образовывать магнитных потоков рассеяния при продольном намагничивании стенок трубопровода (т.е. в кольцевом модуле дефектоскопического блока ) и, наоборот, будут образовывать наибольшие по интенсивности магнитные потоки рассеяния при поперечном намагничивании стенок трубопровода (т.е. в роторном модуле дефектоскопического блока).
Аналогичным образом поперечно ориентированные протяженные дефекты не будут образовывать магнитных потоков рассеяния при поперечном намагничивании стенок трубопровода и будут образовывать магнитные потоки рассеяния максимальной интенсивности при продольном намагничивании стенок трубопровода.
Как показывают эксперименты, при изменении угла между направлением намагничивания и продольной осью протяженных дефектов в пределах (9О+45)o интенсивность магнитных потоков рассеяния от дефектов хотя и снижается по отношению к ее максимальному значению в несколько раз, тем не менее остается на уровне, позволяющем фиксировать указанные дефекты.
Поэтому совокупность примененного в заявленном дефектоскопе-снаряде последовательного поперечного и продольного намагничивания стенок трубопровода обеспечивает обнаружение протяженных дефектов с любой ориентацией при максимальной чувствительности к наиболее распространенным продольно ориентированным и поперечно ориентированным протяженным дефектам.
Фиксация магнитных полей рассеяния от дефектов производится многозвенными магниточувствительными преобразователями, в качестве которых наиболее часто применяются т.н. магнитоиндукционные преобразователи в виде катушек, расположенных на ферромагнитных сердечниках. Преимуществом преобразователей указанного типа являются высокая чувствительность, приемлемая помехозащищенность (при соответствующем схемно-конструктивном исполнении), возможность широкого варирования конструктивных параметров. Одной из особенностей указанных преобразователей является зависимость их чувствительности от направления перемещения относительно направления намагничивания стенок трубопровода. Как показывают эксперименты, максимальную чувствительность к протяженным дефектам эти преобразователи имеют при совпадении направления их перемещения с направлением намагничивания стенок трубопровода, а минимальную чувствительность (во много-много раз меньшую максимальной) при ортогональности направлений их перемещения и направления намагничивания стенок трубопровода. При этом изменение величины угла между указанными направлениями в пределах +45o вызывает уменьшение чувствительности преобразователя примерно в 1,5 раза (т. е. практически следует учитывать проекцию вектора скорости перемещения преобразователя на направление намагничивания стенки трубопровода).
В связи с тем что в кольцевом модуле дефектоскопического блока предлагаемого дефектоскопа-снаряда направление перемещения преобразователя совпадает с направлением намагничивания стенок трубопровода, обеспечиваются наиболее благоприятные условия для работы преобразователей намагнитоиндукционного типа.
В роторном модуле дефектоскопического блока указанное совпадение направления скорости перемещения преобразователя и направления намагничивания отсутствует, однако при равенстве продольной и поперечной скорости перемещения ротора (т.е. при α45o) чувствительность магнитоиндукционных преобразователей в обоих модулях будет одинаковой.
Очевидно, что для предотвращения пропуска дефектов звенья в преобразователе кольцевого модуля дефектоскопического блока должны быть расположены с малыми промежутками между собой, а еще лучше в два ряда с шахматным расположением соседних звеньев в разных рядах. Последний вариант расположения звеньев в преобразователе позволяет обеспечивать их значительное радиальное перемещение при преодолении возможных сужений и препятствий в трубопроводе.
Для предотвращения пропуска дефектов преобразователями роторного модуля дефектоскопического блока необходимо обеспечить определенное соотношение между длиной и числом преобразователей, размещенных на роторе.
Это соотношение легко выводится из рассмотрения расчетной схемы, представленной на фиг.3.
Как следует из этой схемы, одиночный преобразователь с заданной длиной обеспечивает сплошное сканирование спиральной полосы внутренней поверхности трубопровода, ширина которой равна длине преобразователя, а угол наклона относительно образующей трубопровода является функцией отношения поперечной (окружной) и продольной скоростей перемещения преобразователя: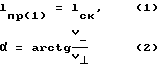
где lпр(1) длина одиночного преобразователя, м,
lск ширина полосы сканирования, м,
α угол наклона полосы сканирования (траектории перемещения преобразователя) к образующей трубопровода, град,
v┴ и V- соответственно поперечная и продольная скорость перемещения преобразователя, м/с.
С другой стороны, величина перемещения преобразователя по оси трубопровода за один оборот ротора может быть выражена соотношением:
где S(1) величина перемещения преобразователя за один оборот ротора, м,
π = 3,14,
D диаметр трубопровода, м.
Очевидно, что для предотвращения пропуска дефектов в случае одиночного преобразователя в роторном модуле дефектоскопического блока необходимо и достаточно выполнить условие:
lск=lпр(1)≥S(1),
или
lпр(1)=K•S(1)
где K>1 коэффициент запаса, учитывающий, в частности, увеличение фактического значения S(1) на внешней стороне криволинейных участков трубопровода по сравнению с расчетным его значением, определяемым на прямолинейном участке трубопровода.
Из (3) и (5) получим:
Для получения одинаковой чувствительности преобразователей кольцевого и роторного модулей соответственно к поперечным и продольным дефектам целесообразно обеспечить условие
v┴ = v-, (7)
при выполнении которого соотношение (6) упрощается и принимает вид:
lпр(1) = K•π•D (8)
Анализ этого соотношения показывает, что реализация роторного модуля дефектоскопического блока с одиночным преобразователем (при соблюдении условия, выражаемого соотношением (7)), практически затруднено, т.к. приводят к нерациональным значениям длины преобразователя. В самом деле, например, для трубопровода диаметром 1420 мм длина преобразователя при коэффициенте запаса K=1,2 составит величину
lпр(1)=1,2•3,14•1,4 ≈ 5,3 м.
В связи с этим целесообразно применять в роторном модуле дефектоскопического блока несколько равномерно размещенных по поперечному периметру ротора преобразователей. В этом случае будет иметь место очевидное соотношение:
lск=lпр(1)=n•lпр
где lск как и ранее, ширина полосы сканирования, м,
n число преобразователей,
lпр длина одного преобразователя, м.
При этом из (6) и (9) получим: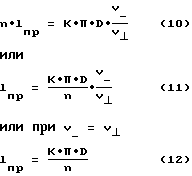
Например, при K=1,2, Д=1420 мм, n=12
что и может считаться вполне приемлемым.
Очевидно, что протяженность зон намагничивания стенок трубопровода узлами намагничивания, расположенными на роторном модуле дефектоскопического блока, должна быть не меньше длины преобразователей, определяемой соотношением (12). Для этого длина магнитов (электромагнитов) должна быть примерно равна длине преобразователей.
При соблюдении указанных условий дефектоскоп-снаряд в процессе перемещения по трубопроводу будет обнаруживать и фиксировать все дефекты в стенках трубопровода, превышающие критические размеры, определяемые пороговой чувствительностью преобразователей.
При этом наличие и последовательность появления сигналов на выходах звеньев преобразователей будут зависеть от характера, протяженности и пространственной ориентации дефектов. Так, например, при пересечении участка трубопровода с линейно-протяженным продольным дефектом в его стенке преобразователями, расположенными в роторном модуле дефектоскопического блока, сигналы будут появляться почти одновременно на выходах всех звеньев, пересекающих дефектный участок, от этого же дефекта на выходе звеньев преобразователя в кольцевом модуле дефектоскопического блока сигналы будут отсутствовать.
При проихождении участка трубопровода с линейно-протяженным поперечным дефектом в его стенке на выходе звеньев преобразователей в роторном модуле дефектоскопического блока сигналы будут отсутствовать, а на выходе преобразователя в кольцевом модуле, пересекающих дефектный участок, будут появляться почти одновременно.
При наклонном положении линейно-протяженного дефекта в стенке трубопровода относительно его образующей сигналы от дефекта будут появляться на выходах звеньев преобразователей, расположенных как на роторном, так и на кольцевом модулях дефектоскопического блока, причем последовательность появления сигналов будет соответствовать моментам пересечения дефектного участка стенки трубопровода соответствующими звеньями преобразователей.
При прохождении участка трубопровода с площадно-сосредоточенным дефектом в его стенке (типа коррозионной каверны либо свища) сигналы от дефекта появятся на выходах пересекающих дефектный участок отдельных звеньев преобразователей, расположенных в обоих модулях дефектоскопического блока.
Наконец, при прохождении участка трубопровода с площаднопротяженным дефектом в его стенке (типа множественной коррозии) сигналы от дефекта появятся примерно одновременно на выходе пересекающих дефектный участок нескольких звеньев преобразователей, также расположенных в обоих модулях дефектоскопического блока.
Очевидно, что для последующей эффективной расшифровки результатов обследования трубопроводов блок регистрации в дефектоскопе-снаряде должен быть многоканальным и обеспечивать раздельную запись сигналов с выхода звеньев преобразователей в функции времени и/или расстояния по оси трубопровода. Имеется в виду такое, что одновременно с записью сигналов от дефектов в блоке регистрации осуществляется запись продольных и угловых координат обнаруживаемых дефектов (по сигналам от соответствующих датчиков).
По завершении обследования участка трубопровода дефектоскопический снаряд извлекается из трубопровода, после чего производится расшифровка результатов обследования. При этом, как показано выше, обеспечивается выявление наличия в стенках обследованного трубопровода дефектов разного вида и ориентации, а также идентификация их вида и определение их протяженности и ориентации. Таким образом применение предлагаемого дефектоскопа-снаряда позволит существенно повысить дефектоскопическую эффективность обследования трубопроводов.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ ВНУТРИТРУБНОЙ МАГНИТНОЙ ДЕФЕКТОСКОПИИ СТЕНОК СТАЛЬНЫХ ТРУБОПРОВОДОВ | 1993 |
|
RU2102737C1 |
| ДЕФЕКТОСКОП-СНАРЯД ДЛЯ ВНУТРИТРУБНОГО ОБСЛЕДОВАНИЯ ТРУБОПРОВОДОВ | 1993 |
|
RU2069288C1 |
| МАГНИТНЫЙ ПРОХОДНОЙ ДЕФЕКТОСКОП | 1998 |
|
RU2144182C1 |
| СПОСОБ МАГНИТНОЙ ДЕФЕКТОСКОПИИ И УСТРОЙСТВО ДЛЯ ОСУЩЕСТВЛЕНИЯ ЭТОГО СПОСОБА | 1997 |
|
RU2133032C1 |
| УСТРОЙСТВО ДЛЯ НАМАГНИЧИВАНИЯ СТЕНОК ТРУБ ДЕЙСТВУЮЩИХ ТРУБОПРОВОДОВ | 2006 |
|
RU2304279C1 |
| АППАРАТ ВНУТРИТРУБНОГО КОНТРОЛЯ И СПОСОБ ПЕРЕМЕЩЕНИЯ ЕГО В МАГИСТРАЛЬНОМ ГАЗОПРОВОДЕ С ЗАДАННОЙ РАВНОМЕРНОЙ СКОРОСТЬЮ | 2010 |
|
RU2451867C2 |
| Магистральный проходной магнитный дефектоскоп | 2023 |
|
RU2820508C1 |
| НАРУЖНЫЙ СКАНИРУЮЩИЙ ДЕФЕКТОСКОП | 2013 |
|
RU2539777C1 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ РАССТОЯНИЯ, ПРОЙДЕННОГО ВНУТРИТРУБНЫМ СНАРЯДОМ-ДЕФЕКТОСКОПОМ С ОДОМЕТРАМИ | 2006 |
|
RU2316782C1 |
| ВНУТРИТРУБНЫЙ ДИАГНОСТИЧЕСКИЙ СНАРЯД С РЕГУЛИРУЕМОЙ СКОРОСТЬЮ ДВИЖЕНИЯ ДЛЯ ОБСЛЕДОВАНИЯ ТРУБОПРОВОДОВ | 2021 |
|
RU2779721C1 |
Использование: дефектоскоп-снаряд относится к устройствам для внутритрубного обследования трубопроводов, предназначенным для обнаружения дефектов в их стенках типа коррозионных каверн, трещин, механических повреждений и т. п. Сущность: дефектоскоп-снаряд снабжен дополнительно введенными байпасным патрубком для перепуска транспортируемого по обследуемому трубопроводу продукта и системой автоматического регулирования скорости перемещения, содержащей датчик 9 скорости перемещения, блок 10 управления с задатчиком скорости перемещения и регулирующий орган в виде взаимодействующего со стенкой трубопровода тормозного устройства 11 - многосекционного кольцевого электромагнита с разнесенными по оси трубопровода и обращенными к внутренней поверхности трубопровода щеточными полюсами 12 и 1З и обмотками 14 и 15. Кроме того, дефектоскопический блок в дефектоскопе-снаряде выполнен в виде двух разнесенных по оси трубопровода модулей, в одном из которых (кольцевом) узел намагничивания совмещен с одной из секций кольцевого электромагнита тормозного устройства 11, обмотка которой подключена к блоку энергоснабжения обособленно от обмоток других секций электромагнита, подключенных к выходу блока 10 управления, а в другом (роторном) модуле узлы намагничивания выполнены в виде магнитов (электромагнитов) с разнесенными перпендикулярно оси трубопровода полюсами, равномерно размещенных по поперечному периметру ротора 17, установленного на основании с возможностью вращения вокруг оси и снабженного приводом вращения, причем звенья магниточувствительных преобразователей расположены в кольцевом модуле между кольцевыми полюсами узла намагничивания по всему поперечному периметру трубопровода, а в роторном модуле - между полюсами магнитов (электромагнитов) по линиям, параллельным образующим трубопровода. 5 з.п.ф-лы, 3 ил.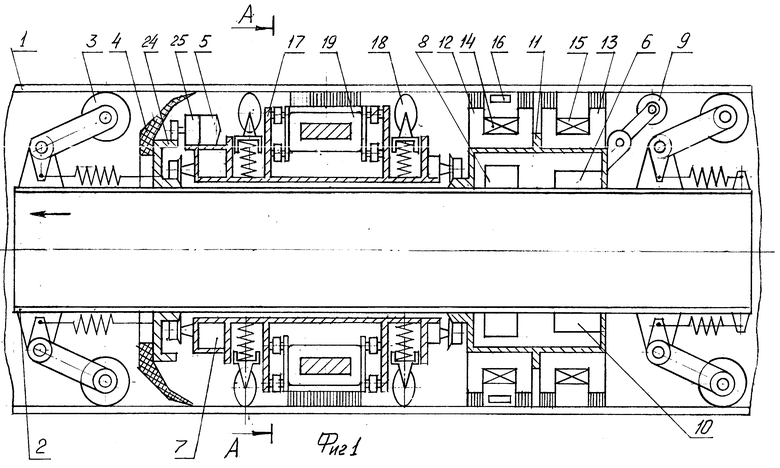
где Lп р длина преобразователя, м;
K > 1 коэффициент запаса, необходимый для обеспечения сплошного сканирования поверхности трубопровода на криволинейных участках;
D диаметр трубопровода, м;
n число преобразователей (и магнитов);
V- и V┴ соответственно продольная и поперечная (окружная) скорость перемещения преобразователя, м/с.
| DE, патент, 2423113, кл | |||
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
