Изобретение относится к средствам неразрушающего контроля ферромагнитных изделий, осуществляемого путем их намагничивания и фиксации магнитных полей рассеяния от дефектов, а точнее к устройствам для внутритрубной магнитной дефектоскопии стенок стальных трубопроводов (именуемых также магнитными дефектоскопами снарядами, интеллигентными поршнями и т.п.) и может быть использовано при проведении внутритрубной диагностики технического состояния стенок трубопроводов.
Аналогия заявляемого устройства являются:
устройство по патенту США N 3225293, НКИ 324-37, 1964 г.
устройство по патенту СССР N 745386, МКИ G 01 N 27/82, опубл. 30.06.80 г. БИ N 24 и патенту США N 4105972, НКИ 324-220, 1978 г.
устройство по патенту ФРГ N 2423113, МКИ G 01 N 27/87, опубл. 15.11.1984 г.
а также устройства с фирменным названием "MagneScan" и "MagneScan HR", выпускаемой фирмой "Pipetronix" (Канада, США, ФРГ).
Недостатком указанных аналогов является их недостаточная дефектоскопическая эффективность, обусловленная тем, что намагничивание стенок обследуемых трубопроводов в этих устройствах осуществляется вдоль образующих трубопроводов, вследствие чего продольные дефекты практически не образуют магнитных потоков рассеяния и не могут быть обнаружены. По этой же причине получаемая посредством этих устройств информация недостаточна для определения вида и ориентации обнаруживаемых дефектов.
В определенной мере указанные недостатки устранены в устройстве для контроля труб по патенту США N 4649343, МКИ G 01 N 27/83, G 01 P 33/12, НКИ 324/220 (заявл. 27.12.83, опубл. 10.03.87 г.), в котором применены намагничивающие узлы, обеспечивающие продольное намагничивание стенок трубы в сочетании с их циркулярным или поперечным намагничиванием.
Однако, циркулярное намагничивание посредством проходящего внутри трубы проводника с током практически не пригодно для внутритрубной дефектоскопии протяженных трубопроводов, а поперечное намагничивание стенки трубопровода посредством электромагнита, расположенного внутри соленоида для продольного намагничивания, недостаточно эффективно из-за больших немагнитных зазоров на пути поперечных магнитных потоков.
Кроме того, указанное устройство не рассчитано на применение в трубопроводящих, и поэтому не имеет ряд функциональных составных частей, присущих внутритрубным дефектоскопам-снарядам.
Последнее замечание относится и к многим устройствам для магнитной дефектоскопии протяженных ферромагнитных изделий и, в частности, труб, в которых применяются разнонаправленные намагничивающие потоки, позволяющие обнаруживать разноориентированные дефекты, но не рассчитанные на внутритрубную дефектоскопию (см. например, заявку ФРГ N 2037787, МКИ G 01 N 27/86, НКИ 42 к 46/04, опубл. 03.02.1972 г. патент США N 4439730, МКИ G 01 N 27/12, НКИ 324-232, опубл. 27.03.1984 г. заявка Японии N 57-25071, МКИ G 01 N 27/83, опубл. 1982 г. статью П.К. Ощепкова и др. "Установка ИПН-3 для контроля качества труб" в журнале "Дефектоскопия" N 4, 1969 г. и др.
Известен также аналог в виде внутритрубного дефектоскопа-снаряда, обеспечивающего обнаружение продольных дефектов за счет возбуждения кругового магнитного поля в стенке трубопровода пропусканием по ее участку импульсов большого тока (патент США N 3539915, МКИ G 01 R 33/12, НКИ 324-37, опубл. 10.10.70 г.) и применения детектора потока рассеяния, вращающегося по внутренней поверхности стенки трубопровода.
Недостатками этого устройства являются невозможность обнаружения поперечных дефектов, а также низкая надежность системы кругового намагничивания стенки трубопровода, использующая контактный подвод тока к стенке трубопровода.
Наконец, известны аналоги в виде внутритрубных дефектоскопов, отличительной особенностью которых является применение токовихревых преобразователей (детекторов, зондов), которые во время поступательного перемещения вращаются вокруг центрального основания (вала), сканируя внутреннюю поверхность трубопровода по спиральной (винтовой) траектории (заявка ФРГ N 216434, МКИ G 01 N 27/86, опубл. 05.05.1975 г. авт.св. СССР N 1677603 А1, опубл. 15.09.91 г. БИ N 34).
Недостатком указанных аналогов является их низкая дефектоскопическая эффективность, связанная с применением токовихревых преобразователей, обеспечивающих обнаружение лишь дефектов, расположенных на и вблизи внутренней поверхности трубопровода, в то время как большинство дефектов в стенках трубопроводов располагаются на их внешней стороне. Следует вместе с тем отметить, что в устройстве по авт.св. N 1677603 A1 имеется существенный признак, используемый в предлагающемся изобретении, а именно наличие двух вращаемых в разные стороны роторов. Однако этот признак в аналоге используется для повышения точности определения координат дефектов и не обеспечивает повышения эффективности обнаружения и определения характеристик дефектов.
Наиболее близким техническим решением к изобретению является устройство для внутритрубной магнитной дефектоскопии стенок стальных трубопроводов по патенту ФРГ N 2423113, МКИ G 01 N 27/87, опубл. 15.11.1984 г. (прототип).
Указанное устройство состоит из помещаемых в трубопровод механически связанных друг с другом блока энергоснабжения, блока регистрации и дефектоскопического блока, содержащего равномерно размещенные по перечному периметру трубопровода магниты и расположенные между полюсами магнитов многозвенные магниточувствительные преобразователи.
Кроме того, в состав устройства входят уплотнительные моменты, обеспечивающие продольное перемещение устройства по трубопроводу вместе с транспортируемым по нему продуктом, а также одометр для определения координат обнаруживаемых дефектов.
Одной из отличительных особенностей указанного устройства является наличие узлов, обеспечивающих вращение устройства вокруг его продольной оси в процессе перемещения по трубопроводу. Это вращение устройству придается для обеспечения его равномерного износа.
Данное устройство, также как и другие известные аналоги, не обладает достаточно высокой дефектоскопической эффективностью, т.к. не обеспечивает обнаружение продольных дефектов, а также определение их вида и ориентации (из-за продольной ориентации полюсов магнитов).
Целью настоящего изобретения является повышение дефектоскопической эффективности устройства для внутритрубной магнитной дефектоскопии стенок стальных трубопроводов, осуществляемой путем их намагничивания и фиксации магнитных полей рассеяния от дефектов.
При этом под повышением дефектоскопической эффективности имеется в виду обеспечение возможности обнаружения разноориентированных (в т.ч. поперечных и продольных) дефектов а также определения их вида и ориентации.
Достигается эта цель, согласно изобретению, тем, что в устройстве, содержащем размещаемые в обследуемом трубопроводе механически связанные друг с другом блок-привод продольного перемещения, блок энергоснабжения, блок регистрации информации, дефектоскопический блок, состоящий из установленных на цилиндрическом основании, соосном с трубопроводом, и равномерно размещенных с заданным шагом по поперечному периметру трубопровода П-образных магнитов (электромагнитов) и расположенных между полюсами магнитов многозвенных магниточувствительных преобразователей (далее "преобразователей"), а также привод вращения и датчики координат обнаруживаемых дефектов, магниты (электромагниты) вместе с преобразователями в дефектоскопическом блоке закреплены на двух разнесенных по длине трубопровода роторах, расположенных соосно с трубопроводом на основании (основаниях) с возможностью вращения вокруг оси и приводимых во вращение в противоположных направлениях посредством привода вращения, таким образом, что полюса магнитов разнесены по направлениям их перемещениях по спиральным траекториям относительно поверхности трубопровода, а звенья преобразователей расположены в ряд по линиям, перпендикулярным направлениям их перемещения, причем расположенные на/в роторах энергопотребляющие узлы подключены к блоку энергоснабжения непосредственно либо через дополнительно введенные токосъемные узлы, а выходы преобразователей подключены непосредственно либо через дополнительно введенные блоки обработки сигналов и/или узлы передачи сигналов к блоку регистрации.
Такое выполнение дефектоскопического блока обеспечивает последовательное намагничивание участков стенки трубопровода по разным направлениям и, как следствие, позволяет обнаруживать разноориентированные дефекты. Кроме того, такое выполнение позволяет по временной последовательности поступления сигналов от разных звеньев преобразователей определить вид и ориентацию дефектов (см. ниже).
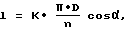
Привод вращения роторов целесообразно выполнить таким, чтобы скорость их вращения была синхронизирована со скоростью продольного перемещения роторов по трубопроводу, при этом число магнитов с преобразователями на каждом роторе и длина полюсов магнитов (и преобразователей) выбраны такими, что выполняется соотношение:
где l длина полюсов магнитов и преобразователей, м;
K безразмерный коэффициент запаса;
π = 3,14;
D диаметр контролируемого трубопровода, м;
n число магнитов с преобразователями (на каждом роторе); угол между направлением перемещения магнитов преобразователями и образующей трубопровода, град;
угол между направлением перемещения магнитов преобразователями и образующей трубопровода, град;
V0 и V- соответственно окружная и продольная скорости перемещения магнитов с преобразователями, м/с.
Имеется в виду при этом, что под длиной полюсов магнитов и преобразователей l подразумевается их размер в направлении, перпендикулярном направлению магнитных силовых линий в магнитопроводе, а величина коэффициента запаса K определяется исходя из необходимости перекрытия соседних зон контроля поверхности трубопровода на участках его изгиба и с учетом возможной нестабильности соотношения величин окружной и продольной скоростей перемещения магнитов с преобразователями.
Такое решение позволяет обеспечить полноту контроля всей поверхности трубопровода при возможных изменениях скорости продольного перемещения устройства по трубопроводу в широких пределах.
Привод вращения роторов может быть выполнен так, что окружная скорость перемещения магнитов и преобразователей относительно трубопровода совпадает по величине с продольной скоростью их перемещения по трубопроводу, а магниты установлены на роторах таким образом, что их полюса разнесены по направлениям, расположенным под углом +45o на одном роторе и под углом -45o на другом роторе относительно образующих трубопровода.
Такое решение обеспечивает наиболее благоприятные условия для обнаружения разноориентированных дефектов и, кроме того, одинаковую чувствительность преобразователей магнитоиндукционного типа к продольным и поперечным дефектам.
Привод вращения роторов может быть образован блок-приводом продольного перемещения и опорно-ходовыми колесами, закрепленными на роторах с возможностью свободного вращения вокруг своих осей в плоскостях, повернутых на угол +45o на одном роторе и на угол -45o на другом роторе относительно продольно-осевых плоскостей трубопровода.
Такое выполнение привода вращения позволяет наиболее простым способом обеспечить разнонаправленное вращение роторов (за счет преобразования продольного перемещения устройства в поступательно-вращательное перемещение роторов).
Данное устройство может быть выполнено с роторами, расположенными на отдельных цилиндрических основаниях, соединенных друг с другом карданным шарниром, причем магниты с преобразователями и опорно-ходовые колеса закреплены на роторах на подпружиненных кронштейнах с возможностью радиального перемещения.
Такая конструкция обеспечивает хорошую проходимость устройства по кривым участкам и через сужения трубопровода.
Полюса магнитов в дефектоскопическим блоке могут быть снабжены упругими магнитопроводными щетками, контактирующими с внутренней поверхностью трубопровода. Такое решение обеспечивает практически беззазорный ввод магнитного потока в стенки трубопровода, что понижает требуемое для намагничивания до необходимой величины значение намагничивающей силы и, кроме того, обеспечивает высокую стабильность степени намагничивания трубопровода и низкую величину помех от полей рассеяния магнитов.
В качестве альтернативного варианта магниты могут быть снабжены дистанирующими узлами, обеспечивающими заданный зазор между полюсами и внутренней поверхностью трубопровода.
Такое решение позволяет значительно снизить силу трения между роторами и стенками трубопровода и обеспечить более устойчивое перемещение устройства (при применении опорных узлов качения, см. ниже).
Дистанционирующий узел может быть выполнен в виде закрепленной на магните каретки (тележки) с 4-мя опорными узлами, которые могут иметь разное пополнение.
В частности, эти опорные узлы могут быть выполнены в виде колес, свободно вращающихся вокруг собственных осей, параллельных полюсам магнита.
Опорные узлы могут быть выполнены в виде колес, установленных в самоустанавливающихся цифрах, установленных в закрепленных в каретке втулках с возможностью свободного поворота вокруг осей, перпендикулярных внутренней поверхности трубопровода и смещенных относительно центров колес в сторону перемещения магнита.
Наконец, опорные узлы могут быть выполнены в виде шаровых опор качения.
Выбор варианта выполнения опорных узлов зависит от условий применения устройства. Например, первый наиболее простой вариант может быть применен при контроле трубопроводов без резких изгибов, а для контроля трубопроводов со значительной кривизной его участков предпочтение следует отдать более сложным второму и третьему варианту опорных узлов.
Блок регистрации и блок энергоснабжения в устройстве могут быть размещены в цилиндрическом основании (основаниях).
Такое решение обеспечивает компактность конструкции устройства.
Блок энергоснабжения может быть выполнен в виде батареи аккумуляторов и подключенного к ней инвертора, а токосъемные узлы при этом могут быть выполнены в виде вращающихся трансформаторов, содержащих расположенные на роторах и цилиндрических основаниях кольцевые магнитопроводы с П-образным поперечным сечением и обращенными друг к другу полюсами и вложенные в магнитопроводы кольцевые обмотки, причем обмотки, расположенные в магнитопроводах, находящихся в цилиндрических основаниях, являются первичными и подключены к выходу инвертора, а обмотки, расположенные в магнитопроводах, находящихся в роторах, являются вторичными и подключены к энергопотребляющим узлам, расположенным на/в соответствующих роторах.
Имеется в виду при этом, что цепи электропитания блока регистрации могут быть подключены непосредственно к батарее аккумуляторов блока энергоснабжения.
Узлы передачи сигналов для электрической связи выходов преобразователей с блоком регистрации могут быть выполнены в виде вращающихся трансформаторов, аналогичных вращающимся трансформатором для связи блока энергоснабжения с энергопотребляющими узлами на/в роторах, причем первичные обмотки указанных трансформаторов расположены в магнитопроводах, находящихся в роторах, и подключены непосредственно или через блоки обработки сигналов к выходам преобразователей, а вторичные обмотки этих трансформаторов расположены в магнитопроводах, находящихся в цилиндрических основаниях, и подключены непосредственно или через блоки обработки сигналов к блоку регистрации.
Блок регистрации может быть выполнен состоящим из двух секций, расположенных по одной в роторах и подключенных непосредственно или через блоки обработки сигналов к выходам преобразователей, расположенных на соответствующих роторах.
Такое решение исключает необходимость в узлах передачи сигналов преобразователей.
Блок энергоснабжения может быть выполнен в виде двух электрогенераторов, содержащих расположенные в цилиндрическим основании (основаниях) статоры и расположенные в каждом роторе соответствующие якоря.
Блок энергоснабжения может быть также выполнен в виде электрогенератора, закрепленных на кронштейнах с опорно-ходовыми колесами, якоря которых кинематически связаны с этими колесами.
Указанные выполнения блока энергоснабжения исключают необходимость в токосъемных узлах.
Преобразователи в дефектоскопическом блоке могут быть выполнены в виде многозвенных магнитоиндукционных зондов со звеньями, образованными попарно дифференциально-включенными катушками.
Такое выполнение преобразователей обеспечивает высокую информативность дефектоскопического блока (за счет многозвенности преобразователей), а также его высокую помехозащищенность (за счет дифференциального включения катушки в звеньях).
Секции блока регистрации, расположенные в роторах, могут быть выполнены многоканальными с числом каналов в каждой секции, по крайней мере совпадающим с числом звеньев во всех преобразователях, расположенных на соответствующем роторе. При этом выход каждого звена преобразователей непосредственно или через блок обработки сигналов подключен к входу соответствующего канала секции блока регистрации.
Такое решение обеспечивает привязку зафиксированных в блоке регистрации сигналов от дефектов к конкретным звеньям конкретных преобразователей, что позволяет определить вид и ориентацию обнаруживаемых дефектов (см. ниже).
Для определения координат обнаруживаемых дефектов устройство снабжено датчиками продольных и угловых координат дефектов, выходы которых непосредственно или через блок обработки сигналов подключены к входам дополнительных каналов записи в секциях блока регистрации.
Кроме того, устройство может быть снабжено приемником сигналов внешних маркеров, выход которого подключен к еще одному дополнительному каналу записи блока регистрации.
Датчик продольных координат может быть выполнен в виде одометра, содержащего колесо, контактирующее с внутренней поверхностью трубопровода, и связанный с ним преобразователь угла его поворота в электрический сигнал (импульсы), выполненный, например, в виде магнито-управляемых контактов (герконов), установленных на кронштейнах вблизи колеса одометра и реагирующих на закрепленные на колесе магниты.
В качестве колеса одометра может быть использовано расположенное на роторе опорно-ходовое колесо. При этом коэффициенты преобразования одометров могут быть определены с учетом косого расположения колес относительно образующих трубопровода по соотношению:
Kx= K•cosα,
где Kx скорректированный коэффициент преобразования одометра с косоходовым колесом, соответствующий коэффициенту преобразования одометра с прямоходовым колесом одинакового диаметра;
K коэффициент преобразования одометра с прямоходовым колесом;
α угол между плоскостью вращения косоходового колеса одометра и продольно-осевой плоскостью трубопровода.
Датчики угловых координат дефектов могут быть выполнены в виде расположенных на роторах и соответствующих секциях-основаниях узлов коммутации, содержащих замыкающие (переключающие) контакты, включенные между источником напряжения и входами соответствующих каналов блока регистрации и управляемые в зависимости от углового положения роторов таким образом, что их срабатывание происходит при крайнем верхнем ("зенитном") положении соответствующих преобразователей. Имеется в виду при этом, что число упомянутых контактов совпадает с числом преобразователей.
Такое решение позволяет определять угловые координаты обнаруживаемых дефектов по временному сдвигу сигналов от них относительно временных меток, соответствующих "зенитным" положениям соответствующих преобразователей.
В варианте устройства с расположением секций блока регистрации в секциях-основаниях упомянутый узел коммутации может быть выполнен состоящим из герконов, расположенных в ряд по образующей секции-основания, а также замыкающих (переключающих) герконы магнитов, расположенных на внутренней поверхности ротора с угловым шагом, совпадающим с угловым шагом расположения преобразователей на роторах, и с продольным шагом, совпадающим с продольным шагом расположения герконов на секции-основании.
Для повышения точности определения угловых координат дефектов герконы могут быть расположены в ряд по образующей дополнительно введенного барабана, размещенного соосно в секции-основании с возможностью свободного поворота вокруг своей оси и снабженного маятниковым пригрузом.
В варианте устройства с расположением секций блока регистрации в роторах узел коммутации может быть выполнен состоящим из герконов, расположенных в ряд по образующей внутренней поверхности ротора, а также замыкающих герконы магнитов, расположенных по внешней поверхности секции-основании с угловым шагом, совпадающим с угловым шагом расположения преобразователей на роторах, и с продольным шагом, совпадающим с продольным шагом расположения герконов на роторе.
Аналогично предыдущему варианту для повышения точности определения угловых координат дефектов замыкающие магниты могут быть расположены на внешней поверхности дополнительно введенного барабана, размещенного соосно в секции-основании с возможностью свободного поворота вокруг своей оси и снабженного маятниковым пригрузом.
В предлагаемое устройство может быть дополнительно введен входящий в состав блока обработки сигналов узел временной задержки выходных сигналов преобразователей, расположенных на первом по ходу перемещении по трубопроводу роторе, с управляемым по скорости перемещения преобразователей временем задержки.
Указанный узел временной задержки сигналов преобразователей может быть выполнен в виде многоканального магнитографа с кольцевым либо дисковым (барабанным) магнитным носителем записи информации, содержащим привод носителя записи, а также последовательно установленные магнитные головки записи, воспроизведения и стирания информации, причем головка стирания подключена к выходу входящего в блок обработки сигналов генератора стирания, головки записи подключены непосредственно или через усилители к выходам звеньев преобразователей, головки воспроизведения подключены непосредственно или через узлы блока обработки сигналов к блоку регистрации и смещены относительно головок записи по направлению перемещения носителя записи на такое расстояние и при этом привод носителя записи выполнен таким образом, что временная задержка воспроизводимых сигналов совпадает со временем перемещения второго ротора в положение первого ротора в каждый момент времени.
Привод носителя записи в магнитографе узла временной задержки может быть выполнен в виде сельсина-приемника, электрически связанного с сельсином-датчиком, вал которого кинематически связан с одним из опорно-ходовых колес второго ротора.
Упомянутый узел временной задержки выходных сигналов преобразователей, расположенных на первом роторе, обеспечивает совмещение записываемых в обоих секциях блока регистрации сигналов от дефектов по оси времени и по длине трубопровода, что упрощает расшифровку результатов контроля.
На фиг.1 приведен схематичный чертеж предлагаемого устройства в продольном сечении (вариант с сочлененным секционным цилиндрическим основанием и размещенными в секциях-основания энергоснабжающим блоком и блоком регистрации, а также с токосъемными узлами и узлами передачи сигналов);
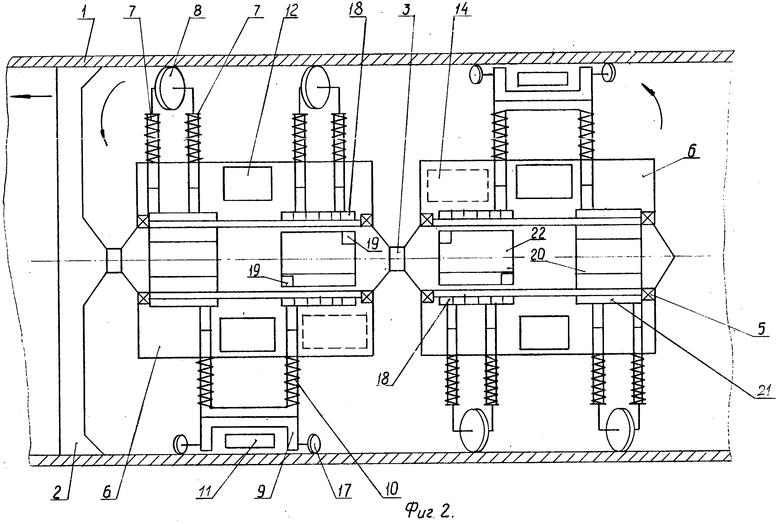
На фиг.2 приведен схематичный чертеж варианта устройства с расположением секций блока регистрации в роторах, генераторами энергоснабжения и узлами коммутации в цилиндрических секциях-основаниях.
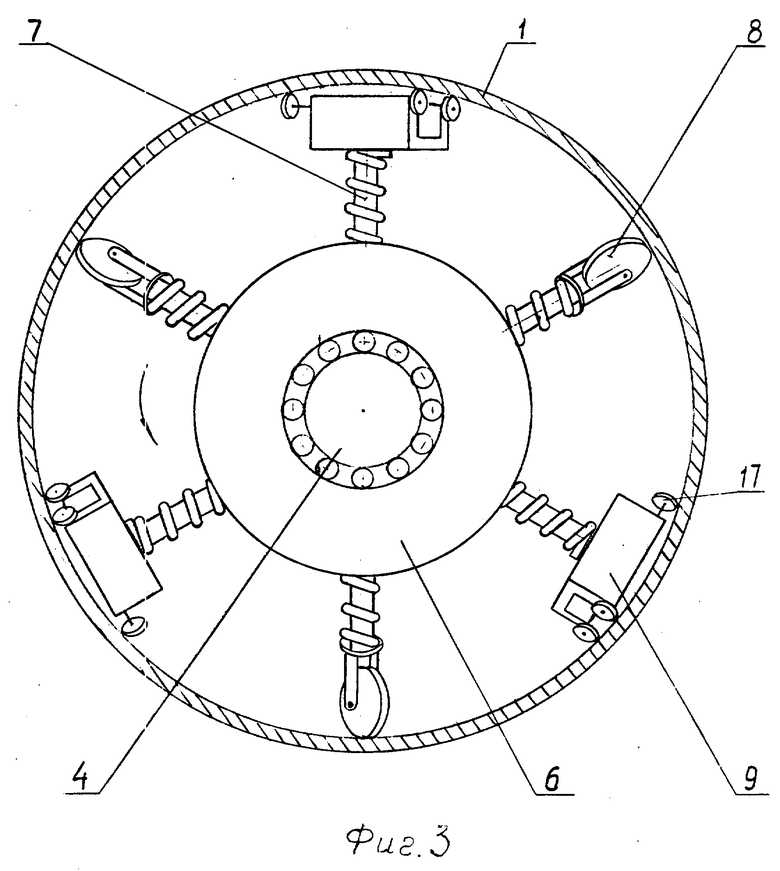
На фиг.3 приведен поперечный разрез варианта устройства с дистанционирующими колесами на полюсах магнитов.
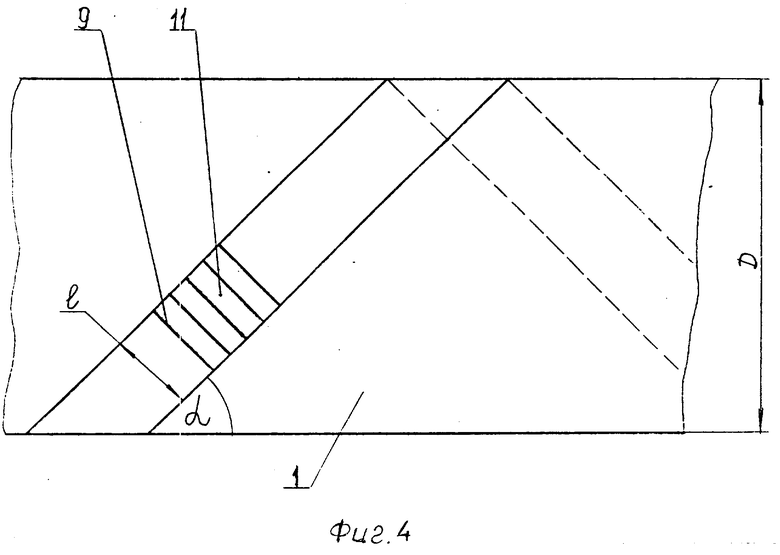
На фиг. 4 приведена схема для определения рационального значения длины полюсов магнитов и преобразователей.
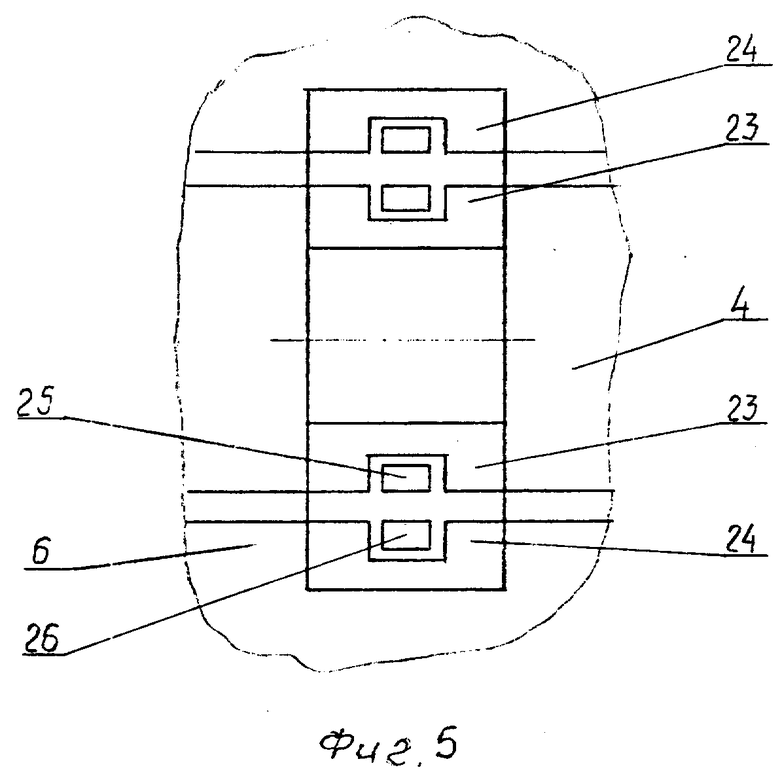
На фиг.5 показан фрагмент схематичного чертежа устройства с вращающимся трансформатором в продольном разрезе.
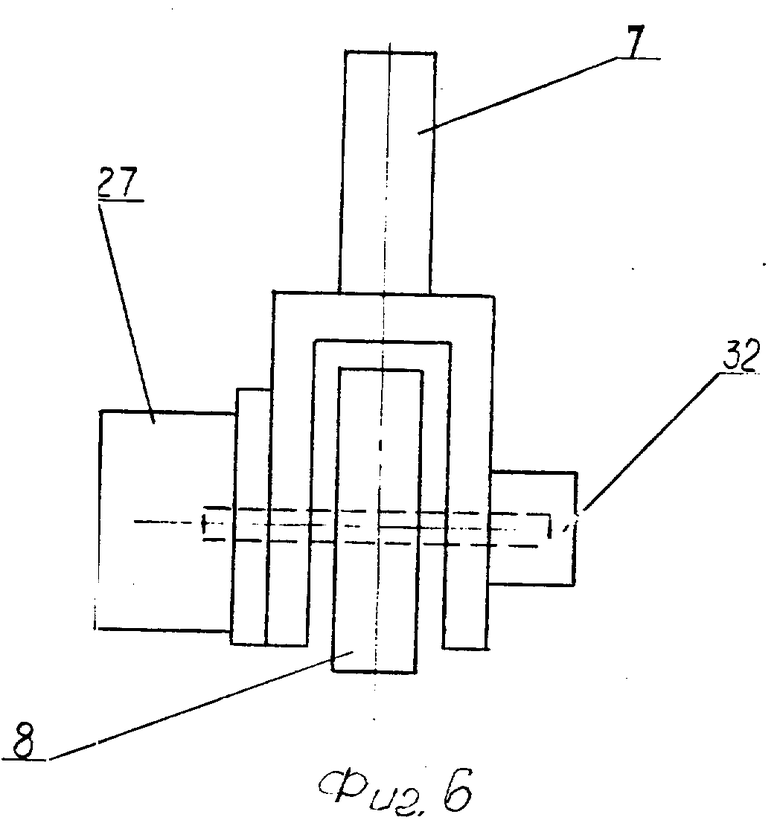
На фиг.6 приведен схематичный чертеж опорно-ходового колеса, установленного в кронштейне с кинематически связанными с ним сельсином-датчиком и генератором энергоснабжения.
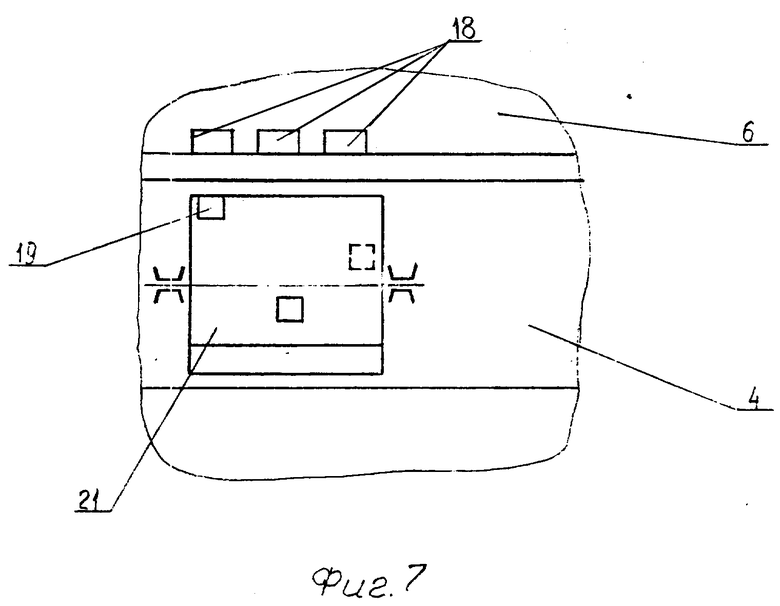
На фиг.7 приведен схематичный чертеж узла коммутации в продольном разрезе.
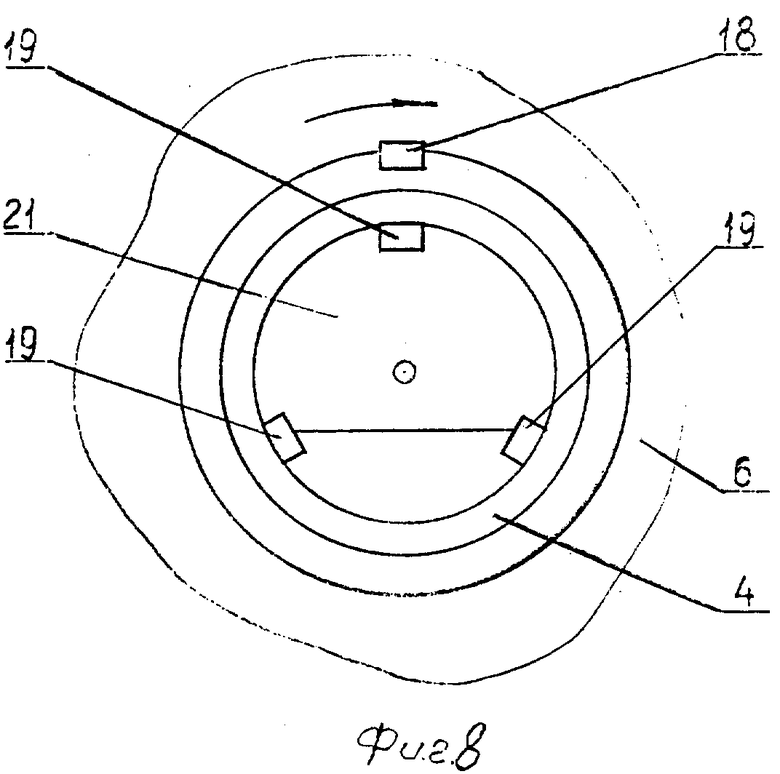
На фиг.8 приведен схематичный чертеж варианта узла коммутации в поперечном разрезе.
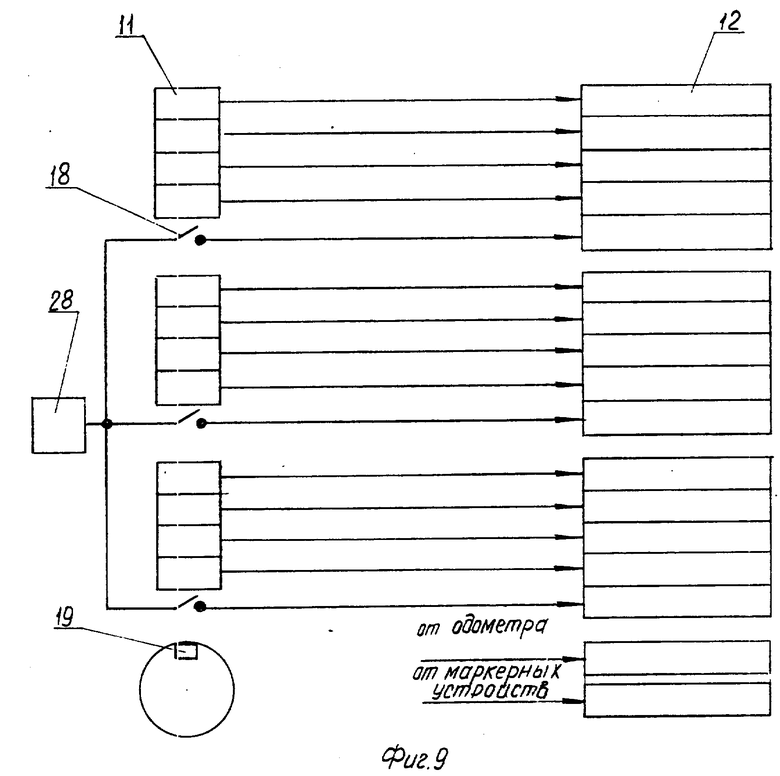
На фиг.9 приведена функциональная схема электрической связи преобразователей и датчиков координат с блоком регистрации.
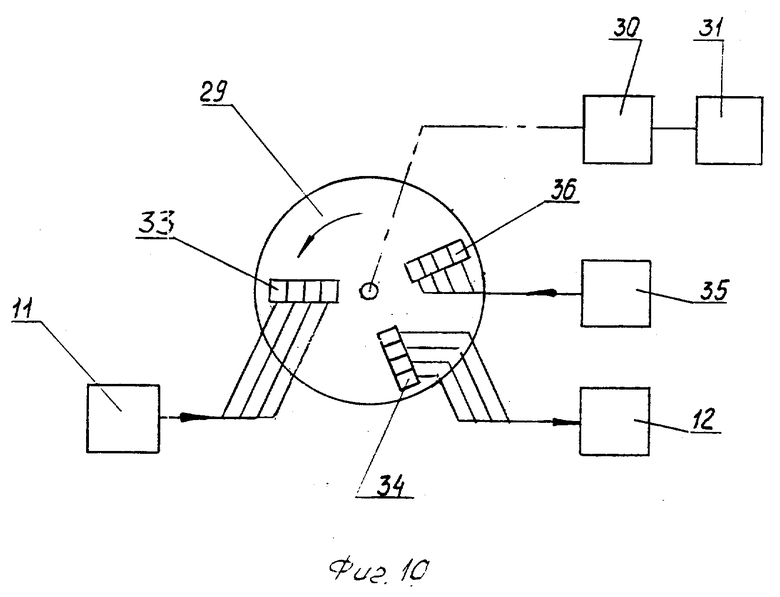
На фиг.10 приведена конструктивная схема узла временной задержки сигналов преобразователей первого ротора.
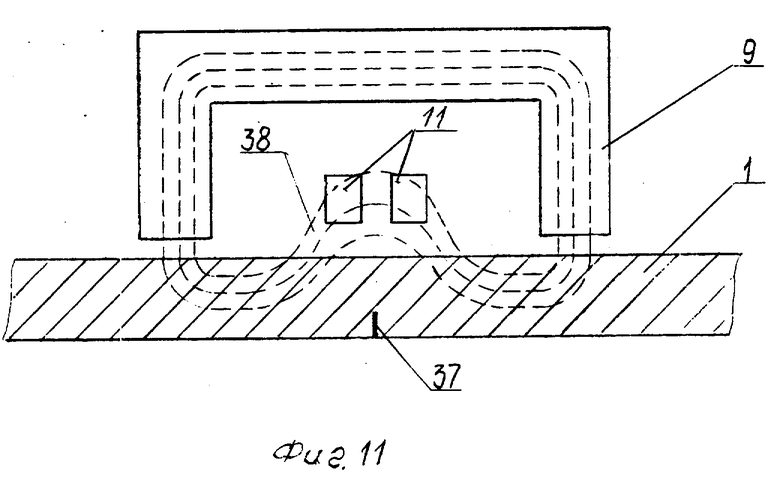
На фиг. 11 приведена схема намагничивания и фиксации поля рассеяния от дефекта на дефектном участке стенки трубопровода.
На фиг. 12 21 приведены примеры записи сигналов от дефектов в блоке регистрации.
В соответствии с изложенным выше устройство содержит расположенные в обследуемом трубопроводе 1 блок-привод 2 продольного перемещения и механически сочлененные с ним посредством карданных шарниров (муфт) 3 цилиндрические секции-основания 4, на которых расположены с возможностью свободного вращения на подшипниках 5 роторы 6. На роторах 6 закреплены на подпружиненных кронштейнах 7 опорно-ходовые колеса 8, имеющие свободу вращения в плоскостях, повернутых на одном роторе на угол a (например, 45o) и на другом роторе на угол -a (-45o) относительно продольно-осевых плоскостей. На роторах 6 закреплены также с заданным шагом по его периметру магниты (электромагниты) 9, установленные на подпружиненных кронштейнах 10 и повернутые на те же углы ±a, что опорно-ходовые колеса 8, так, что полюса магнитов 9 разнесены по направлениям их перемещения. Между полюсами магнитов 9 размещены многозвенные магниточувствительные преобразователи 11.
Как отмечалось, число магнитов 9 с преобразователями 11 на каждом роторе 6 и их длина (в направлении, перпендикулярном возбуждаемому магнитами магнитному потоку) выбраны таким образом, чтобы обеспечивался сплошной контроль всей поверхности стенок трубопровода. Это условие выражается приведенным ранее соотношением, легко выводимом из приведенной на фиг.4 расчетной схемы.
Внутри секций-оснований 4 размещены блок регистрации 12, который выполнен в виде 2-х секций, и блок энергоснабжения 13, также выполненный 2-х секционным.
Устройство может содержать 2-х секционный блок обработки сигналов 14, который может быть расположен либо в роторах 6, либо в секциях-основаниях 4. Устройство может быть снабжено токосъемными узлами 15 и узлами передачи сигналов преобразователей 16, закрепленными на полюсах магнитов 9 дистанционирующими узлами в виде колес 17, а также датчиком угловых координат дефектов в виде узла коммутации, состоящего из ряда герконов 18 и магнитных замыкателей 19.
В другом варианте исполнения (см. фиг.2) секции блока регистрации 12 размещены по одной в роторах 6, а блок энергоснабжения выполнен в виде двух электрогенераторов 20 со статорами, расположенными в секциях-основаниях 4, и якорями 21, расположенными в роторах 6.
В этом устройстве герконы 18 узла коммутации расположены в роторах, а замыкающие магниты 19 на дополнительно введенном барабане 22 (фиг. 5, 6), размещенном соосно секции-основанию с возможностью поворота вокруг своей оси и снабженного маятниковым пригрузом.
Токосъемные узлы 15 и узлы передачи сигналов преобразователей 16 выполнены в виде вращающихся трансформаторов (см. фиг.5), содержащих кольцевые магнитопроводы 23 и 24 с П-образными поперечными сечениями, расположенными соответственно на секциях-основаниях 4 и роторах 6, и кольцевые обмотки 25 и 26.
Блок энергоснабжения 13 может быть выполнен в виде стандартных генераторов 27 с размещением на кронштейнах 7 опорно-ходовых колес 8 и кинематической связью с этими колесами (фиг.8).
Звенья преобразователей 11 подключены к входам соответствующих каналов блока регистрации 12 (фиг.9), который содержит также дополнительные каналы для записи сигналов от датчиков координат, а именно: по одному каналу на каждый преобразователь для записи импульсных сигналов, поступающих от источников напряжения 28 через герконы 18 при "зенитных" положениях каждого преобразователя, а также один общий канал для записи импульсов, поступающих от одометра, и один общий канал для записи сигналов, поступающих от маркерных устройств.
В состав блока обработки сигналов 14 может входить узел временной задержки выходных сигналов преобразователей, расположенных на первом роторе, в виде многоканального магнитографа, содержащего (см. фиг.10) магнитный носитель записи сигналов, например, в виде магнитного диска 29, приводимого во вращение через редуктор 30 сельсином-приемником 31, электрически связанным с сельсином-датчиком 32, кинематически связанным с опорно-ходовым колесом 8 (фиг.6). С магнитным диском 29 взаимодействуют три группы магнитных головок: подключенные к выходам звеньев преобразователей 11 головки записи 33, подключенные к входам каналов блока регистрации 12 головки воспроизведения 34 и подключенные к выходу стирающего генератора 35 головки стирания 36.
Работает предложенное устройство следующим образом.
Будучи помещенным в трубопровод 1 устройство перемещается вместе с перекачиваемым по трубопроводу продуктом (например, природным газом) благодаря блоку-приводу 2 продольного перемещения, выполненному, например, в виде перекрывающего сечение трубопровода поршня с уплотняющими манжетами. Вместе с блоком-приводом 2 по трубопроводу перемещаются механически связанные с ним карданными шарнирами 3 цилиндрические секции-основания 4 с расположенными на них на подшипниках 5 роторами 6. При этом благодаря косому расположению опорно-ходовых колес 8 в подпружиненных кронштейнах 7 роторы 6 вращаются в противоположные стороны (т.е. один из роторов вращается по часовой стрелке, а второй против часовой стрелки). Одновременно расположенные на роторах 6 на подпружиненных кронштейнах 10 магниты 9 с расположенными между их полюсами преобразователями 11 перемещаются по внутренней поверхности трубопровода, описывая скрещивающиеся спиральные траектории. При этом ширина спиральной полосы контроля, осуществляемого каждым преобразователем 11, примерно совпадает с его длиной (и совпадающей с ней длиной полюсов магнитов 9), а намагничивание стенок трубопровода 1 производится по направлениям перемещения магнитов 9 с преобразователями 11, т.е. последовательно вначале под углом +a, а затем под углом -a к образующим трубопровода 1. Предпочтительно значения указанных углов, как указывалось, составляет ±45o.
Число магнитов 9 с преобразователями 11 на каждом роторе 6 и их длина выбраны таким образом, что полюсы контроля каждого преобразователя перекрываются, чем обеспечиваются сплошной контроль всей внутренней поверхности трубопровода 1.
При наличии в стенке трубопровода 1 дефекта 37 в виде локального изменения толщины металла (трещины, коррозионной каверны, царапины и др.) в пересекающем дефектный участок преобразователе 11 образуется сигнал, наводимый магнитным полем рассеяния (38), возникающим над дефектным участком стенки трубопровода 1 при ее намагничивании магнитом 9 (фиг. 11) до состояния технического насыщения. Указанный сигнал с выхода преобразователя 11 поступает (непосредственно или через блок обработки сигналов 14) на вход блока регистрации 12 (см. фиг.9). Одновременно в блок регистрации 12 поступают координатные сигналы от источника напряжения 28 в момент замыкания герконов 18 (при прохождении соответствующим преобразователем "зенитных" положений), а также от непоказанных на чертежах датчиков продольных дефектов (одометров и маркеров).
Энергоснабжение блока регистрации 12 и других энергопотребляющих узлов устройства осуществляется от блока энергоснабжения 13, варианты выполнения которого описаны выше и работа которых не нуждается в особых пояснениях.
После проведения контроля определенного участка трубопровода и извлечения из него устройства проводится воспроизведение и расшифровка информации о дефектах и их местоположении, зафиксированная в блоке регистрации 12.
При этом благодаря применению равнонаправленного намагничивания одних и тех же участков трубопровода обнаруживаются разноориентированными, в том числе поперечные и продольные дефекты, а также обеспечивается получение информации не только о наличии дефектов, но также и о виде обнаруживаемых дефектов и их ориентации, а также об их продольных и угловных координатах.
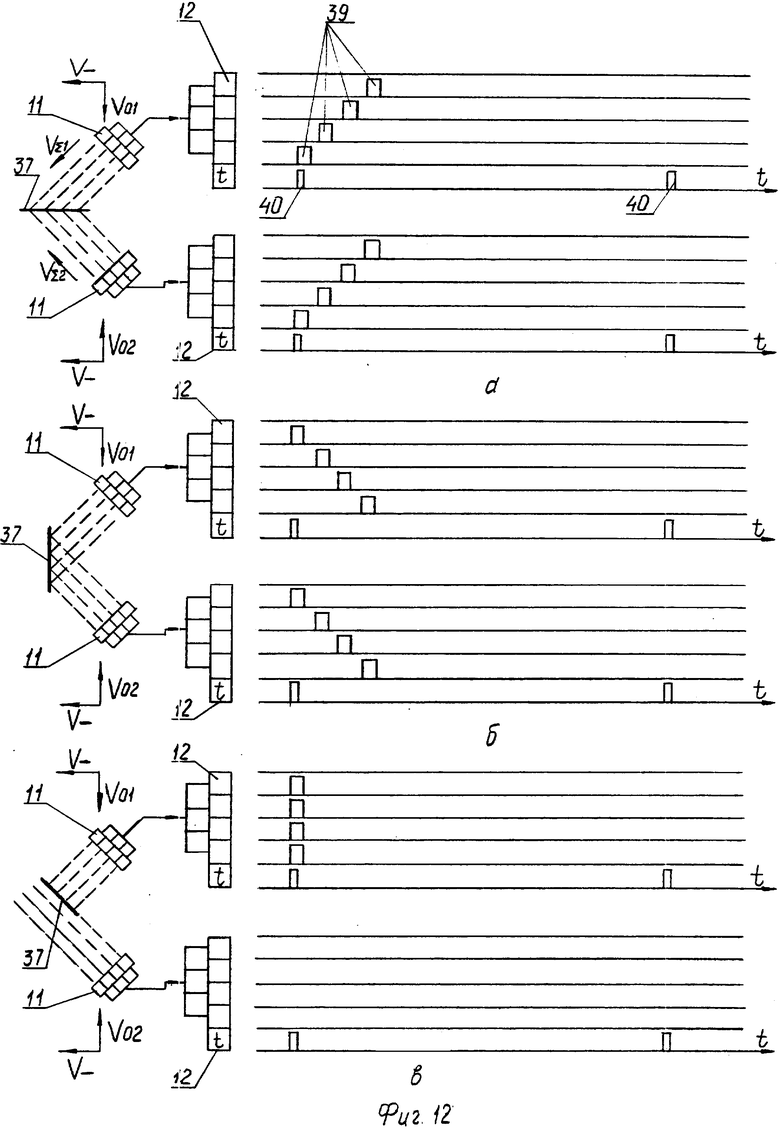
Это достигается благодаря зависимости временной последовательности поступления сигналов с выходов звеньев преобразователей от вида и ориентации дефектов. В самом деле, из-за линейного расположения звеньев в преобразователях по линиям, перпендикулярным направлениям их перемещения, а также благодаря скрещивающимся траекториям их перемещения, распределение сигналов 39 от дефектов по оси времени будет таким:
при линейно-протяженном дефекте (типа трещин, царапин и т.п.), расположенном вдоль образующей трубопровода, сигналы 39 будут поступать вначале от звеньев, расположенных близко к задним торцам роторов, а затем от звеньев, расположенных близко к передним торцам роторов (фиг. 12а);
при таком же дефекте, расположенном поперек образующей трубопроводе, последовательность поступления сигналов от звеньев будет обратной, т.е. вначале будут поступать сигналы от звеньев, расположенных ближе к передним торцам роторов, а затем от звеньев, расположенных близко к задним торцам роторов (фиг.12б);
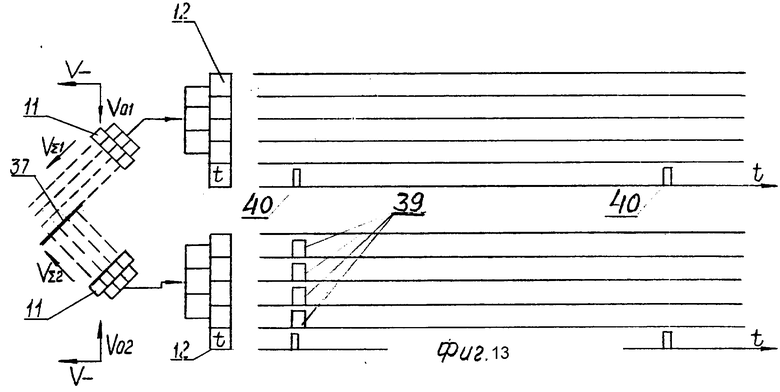
при таком дефекте, расположенном под углами ±a, совпадающими с углами расположения преобразователей относительно образующих трубопровода, сигналы от звеньев преобразователя на одном из роторов будут поступать примерно одновременно, в то время как с преобразователей, расположенных на другом роторе, они будут отсутствовать (фиг.12в, 13).
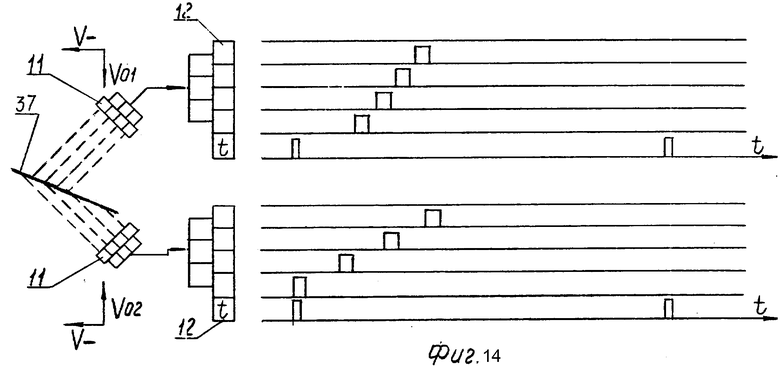
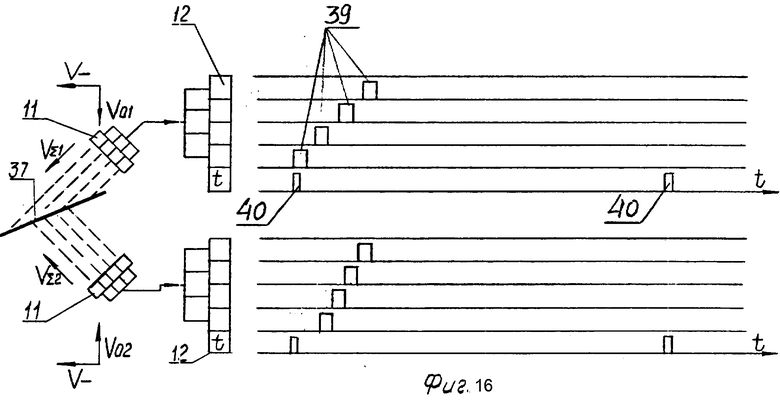
При таких же дефектах, расположенных под другими углами к образующим трубопровода, последовательности поступления сигналов со звеньев преобразователей будут промежуточными по сравнению с приведенными выше (фиг.14, 15, 16, 17).
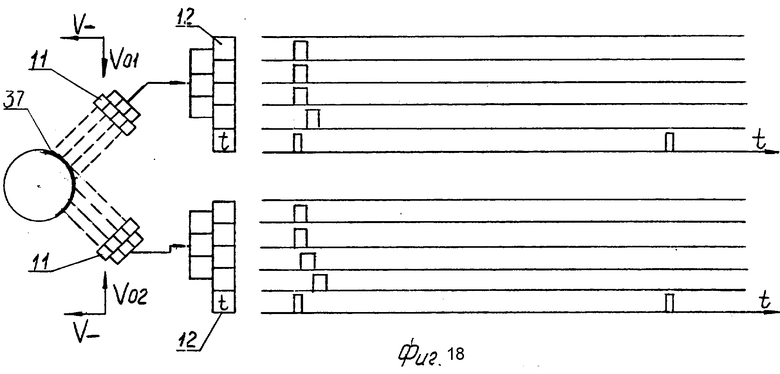
при площадно-протяжном дефекте типа множественной коррозии сигналы от нескольких звеньев преобразователей будут поступать примерно одновременно как на одном, так и на другом роторе (фиг.18);
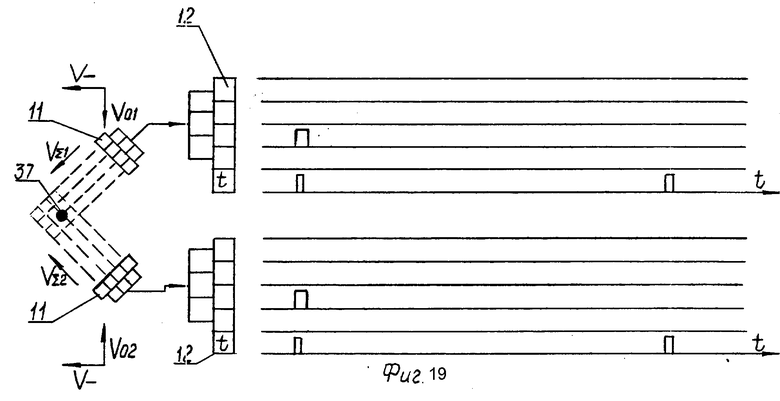
наконец, при площадно-сосредоточенным дефекте сигналы будут поступать с одиночных преобразователей, расположенных на обоих роторах (фиг.19).
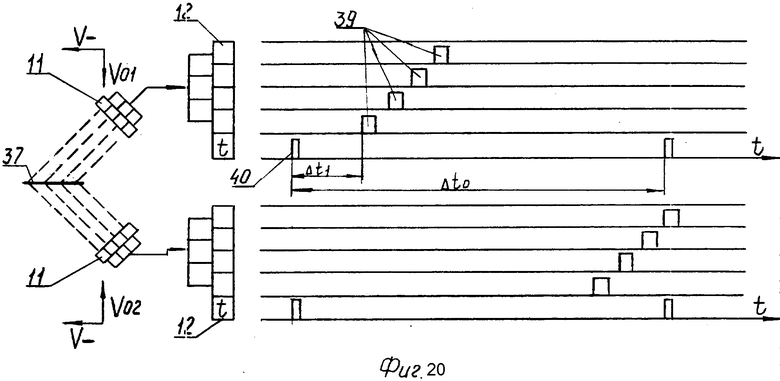
Кроме того, от дефектов 29 в блоке регистрации записываются сигналы 40, маркирующие моменты "зенитных" положений преобразователей 11. Это позволяет оценивать угловые координаты положения дефектов путем сопоставления временных интервалов между сигналами 39 и 40 с интервалами между последовательными сигналами 40, соответствующими 360o. Например, при конкретном значении временного интервала между сигналами 40 (фиг.20) Dt0= 1c и значении интервала между сигналом 39 и ближайшим предыдущим сигналом 40 Δt1= 0,2c можно считать, что обнаруженный дефект находится в угловой зоне поперечного периметра трубопровода, расположенной на угловом удалении
от "зенитной" образующей трубопровода (по направлению вращения соответствующего ротора).
Согласно такому критерию все сигналограммы на фиг. 12 19, очевидно, относятся к случаю расположения соответствующих дефектов в "зенитном" положении (т.к. Δt1≈ i ), а также к случаю, когда дефекты пересекаются звеньями только одного преобразователя (на каждом роторе).
В более общем случае дефекты могут пересекаться звеньями нескольких смежных преобразователей. При этом характер временных последовательностей сигналов на выходе звеньев в зависимости от вида и расположения дефектов будет аналогичным приведенным на фиг. 12а 20 с той разницей, что сигналы будут приходить с выходом звеньев смежных преобразователей и соответственно фиксироваться в каналах записи смежных групп блока регистрации (фиг.21).
В этом случае временной сдвиг Δt1 сигналов 39 от дефектов относительно маркерных сигналов 40 будет одинаковым в обеих группах каналов записи, а относительный временной сдвиг Δtn маркерных сигналов 40 в указанных группах каналов записи будет определяться угловым шагом между смежными преобразователями, который, в свою очередь, зависит от числа магнитов с преобразователями "n" на каждом роторе:
Как указывалось, в устройство может быть введен узел временной задержки сигналов от преобразователей, расположенных на первом роторе, обеспечивающий временное совмещение сигналов, поступающих от преобразователей, расположенных на обоих роторах, при их записи в секциях блока регистрации. Это облегчает процесс расшифровки результатов контроля и снижает вероятность ошибок.
Таким образом, предложенное устройство действительно обеспечивает повышение дефектоскопической эффективности внутритрубных магнитных дефектоскопов, т.к. позволяет обнаружить разноориентированные (в т.ч. как поперечные, так и продольные) дефекты в стенках трубопроводов а также определять вид и ориентацию дефектов.
Кроме того, предложенное устройство позволяет повысить проходимость внутритрубных дефектоскопов через сужения, а также определить не только продольные, но и угловые координаты обнаруживаемых дефектов, а также протяженность дефектов по направлениям, совпадающим с линиями расположения звеньев в преобразователях. Указанная протяженность определяется приближенно как суммарная протяженность звеньев преобразователей, на выходе которых появились сигналы от дефектов. Очевидно, что погрешность такого определения протяженности дефектов находится в обратно пропорциональной зависимости от числа звеньев в преобразователях.
Применение предложенного устройства позволит получить значительный технико-экономический эффект за счет обнаружения большего количества дефектов при внутритрубных обследованиях состояния стенок трубопроводов и получения подробной информации о виде протяженности, ориентации и местоположении обнаруживаемых дефектов.
Кроме того, повышенная проходимость устройства позволяет осуществлять обследования трубопроводов разных диаметров одним типоразмером дефектоскопа, что сокращает их потребное количество.
| название | год | авторы | номер документа |
|---|---|---|---|
| ДЕФЕКТОСКОП-СНАРЯД ДЛЯ ВНУТРИТРУБНЫХ ОБСЛЕДОВАНИЙ ТРУБОПРОВОДОВ | 1994 |
|
RU2102738C1 |
| ДЕФЕКТОСКОП-СНАРЯД ДЛЯ ВНУТРИТРУБНОГО ОБСЛЕДОВАНИЯ ТРУБОПРОВОДОВ | 1993 |
|
RU2069288C1 |
| ВНУТРИТРУБНЫЙ СНАРЯД-ДЕФЕКТОСКОП С РЕЗЕРВИРОВАННЫМИ ДАТЧИКАМИ ДЕФЕКТОВ И ОДОМЕТРАМИ | 2009 |
|
RU2406082C1 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ РАССТОЯНИЯ, ПРОЙДЕННОГО ВНУТРИТРУБНЫМ СНАРЯДОМ-ДЕФЕКТОСКОПОМ С ОДОМЕТРАМИ | 2006 |
|
RU2316782C1 |
| СПОСОБ МАГНИТНОЙ ДЕФЕКТОСКОПИИ И УСТРОЙСТВО ДЛЯ ОСУЩЕСТВЛЕНИЯ ЭТОГО СПОСОБА | 1997 |
|
RU2133032C1 |
| ВНУТРИТРУБНЫЙ СНАРЯД-ДЕФЕКТОСКОП С ОДОМЕТРАМИ | 2005 |
|
RU2306479C2 |
| УСТРОЙСТВО ДЛЯ КОНТРОЛЯ СТЕНОК ТРУБОПРОВОДОВ | 2011 |
|
RU2453835C1 |
| ВНУТРИТРУБНЫЙ СНАРЯД-ДЕФЕКТОСКОП С КОЛЕСНЫМИ ОДОМЕТРАМИ | 2007 |
|
RU2334980C1 |
| Магистральный проходной магнитный дефектоскоп | 2023 |
|
RU2820508C1 |
| ВНУТРИТРУБНЫЙ СНАРЯД-ДЕФЕКТОСКОП С ИЗМЕНЯЕМОЙ СКОРОСТЬЮ ДВИЖЕНИЯ | 2008 |
|
RU2361198C1 |



Использование: изобретение относится к средствам неразрушающего контроля стенок трубопроводов, осуществляемого путем их намагничивания и фиксации магнитных потоков рассеяния от дефектов. Сущность: устройство, состоящее из помещаемых в обследуемый трубопровод механически связанных привода продольного перемещения, блока энергоснабжения, блока регистрации, дефектоскопического блока, привода вращения и датчиков координат дефектов, отличается тем, что размещают магниты и многозвенные преобразователи в дефектоскопическом блоке на двух соосных трубопроводу роторах, приводимых во вращение в противоположных направлениях. При этом магниты установлены на роторах так, что их полюса разнесены по направлениям их перемещения по спиральным траекториям относительно трубопровода, а преобразователи установлены между полюсами магнитов так, что их звенья расположены в ряд по линиям, перпендикулярным направлениям их перемещения. Привод вращения роторов выполнен так, что скорость их вращения синхронизирована со скоростью продольного перемещения устройства по трубопроводу. В частности, эти скорости могут быть одинаковыми, при этом полюса магнитов разнесены по направлениям, образующим угол +45o на одном роторе и угол -45o на другом роторе относительно образующих трубопровода. Привод вращения роторов может быть образован приводом продольного перемещения устройства и косо установленными на роторах опорно-ходовыми колесами. 26 з.п.ф-лы, 21 ил.
где l длина полюсов магнитов и преобразователей, м;
K безразмерных коэффициент запаса;
D диаметр контролируемого трубопровода, м;
n число магнитов с преобразователями (на каждом роторе); угол между направлением перемещения магнитов с преобразователями и образующей трубопровода, град;
угол между направлением перемещения магнитов с преобразователями и образующей трубопровода, град;
Vo и V_ - соответственно окружная и продольная скорости перемещения магнитов с преобразователями, м/с.
| ТВЕРДЫЕ ПРЕПАРАТИВНЫЕ ФОРМЫ ОСПЕМИФЕНА | 2005 |
|
RU2423113C2 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
