Изобретение относится к области наведения, в частности, к наведению линии визирования прибора наблюдения на источник лазерного излучения в горизонтальной плоскости.
Известен способ управления по отклонению, заключающийся в измерении отклонения действительного значения регулируемой величины от ее заданного настройкой значения и управление исполнительным органом до тех пор, пока отклонение не станет равным заданной величине [1, стр. 13].
Наиболее близким техническим решением является способ наведения оси визирования прибора наблюдения, вращающегося (вместе с люком [2, л. 14, 18]) относительно основания (колпака [2 л. 18]), заключающийся в определении отклонения текущего углового положения линии визирования прибора наблюдения (оси визирования [2, л.18]) относительно нулевого направления, связанного с основанием (направление, соответствующее согласованному положению оси визирования прибора наблюдения с осью линии визирования левого оператора в горизонтальной плоскости [2, л.18]) и повороте прибора наблюдения до тех пор, пока отклонение не станет меньше заданной величины (ошибка, измеренная по электрическому сигналу с синусной обмотки датчика положения люка (ДПЛ) не более 200 мВ [2, л.23]). При этом отклонение определяют как разность между возмущающим воздействием, соответствующим текущему угловому положению линии визирования прибора наблюдения относительно нулевого направления (сигнал с синусной обмотки датчика положения люка [2, л.23]) и нулевым возмущающим воздействием, соответствующим угловому положению линии визирования прибора наблюдения тождественному нулевому направлению (нулевое направление и возмущающее воздействие, соответствующее угловому положению линии визирования, тождественному нулевому направлению задаются выставкой датчика положения люка на объекте [2, л.111]).
Устройство наведения линии визирования прибора наблюдения на нулевое направление, выбранное в качестве прототипа заявляемого устройства, содержит блок задания режима наведения (кнопка 3 "ГПО"), сумматор (фазочувствительный выпрямитель-усилитель ФЧВУ), коммутатор (коммутатор 1), привод прибора наблюдения (элементы блока БГ-29, электродвигатель ЭД-76, редуктор РД-2), механически соединенный с прибором наблюдения (объект), датчик положения линии визирования прибора наблюдения (ДПЛ-2,5 Вт), механически соединенный с основанием и с прибором наблюдения, при этом выход датчика положения линии визирования прибора наблюдения подключен к первому входу сумматора, выход которого через замыкающий контакт коммутатора подключен к входу привода прибора наблюдения, выход блока задания режима наведения подключен к управляющему входу коммутатора.
Указанные способ и устройство обеспечивают наведение линии визирования прибора наблюдения в горизонтальной плоскости на нулевое направление при замыкании контура управления приводом прибора наблюдения. При этом нулевое направление задается настройкой и определяется местом установки прибора наблюдения на основании.
Указанные способ и устройство обеспечивают наведение линии визирования прибора наблюдения только на одно направление. Вероятность совпадения этого направления с направлением на источник лазерного излучения, определяемого, например, устройством управления системой постановки оптических помех, определяется по формуле (1)
где
P - вероятность совпадения направления на источник лазерного излучения с нулевым направлением;
Δθ - разрешающая способность (дискрета определения углового положения) датчика лазерного излучения;
Δϕ - сектор обзора датчика лазерного излучения.
При разрешающей способности в горизонтальной плоскости датчика лазерного излучения, равной 3,75 o и секторе обзора - 90o, вероятность совпадения составляет 0,04, что практически не позволяет навести линию визирования прибора наблюдения на источник излучения.
В настоящее время большое значение имеет задача обнаружения и идентификации объекта, от которого принято лазерное излучение. Источником лазерного излучения может быть, например, лазерный целеуказатель. Так как поле зрения прибора наблюдения может иметь достаточно большой угол обзора, после наведения в нем могут оказаться одновременно несколько объектов. Поэтому для обнаружения и идентификации объекта с источником излучения необходимо с минимальной погрешностью навести на него в горизонтальной плоскости определенную часть прибора наблюдения.
Это особенно важно, если источник излучения замаскирован.
Прибор наблюдения, вращающийся относительно основания, имеет нулевое направление, связанное с основанием, - исходное (первоначальное) направление прибора наблюдения, относительно которого в горизонтальной плоскости определяется угловое положение линии визирования прибора наблюдения. Нулевое направление, в общем случае, может задаваться произвольно, исходя из особенностей объекта, решаемой задачи, конструктивных особенностей прибора наблюдения, основания и т.п.
Угловое положение источника излучения в горизонтальной плоскости определяется относительно базового направления - направления, заданного относительно оптической оси датчика, Так как датчики устанавливаются непосредственно на основании объекта, базовое направление также связано с основанием. Базовое направление, в общем случае, задается произвольно и выбирается исходя из особенностей объекта, решаемой задачи и т.п.
Техническим результатом изобретения является наведение линии визирования прибора наблюдения на источник лазерного излучения в горизонтальной плоскости.
Технический результат достигается тем, что в способе наведения линии визирования прибора наблюдения, на источник лазерного излучения преимущественно прибора, выполненного с возможностью вращения вокруг своей оси относительно основания, включающем определение отклонения текущего углового положения линии визирования прибора наблюдения относительно нулевого направления, связанного с основанием и поворот прибора наблюдения до тех пор, пока отклонение не станет меньше заданной величины, дополнительно определяют угловое положение источника лазерного излучения относительно базового направление, связанного с основанием, рассчитывают величину возмущающего воздействия, пропорциональную этому угловому положению и производят замену нулевого возмущающего воздействия возмущающим воздействием, пропорциональным угловому положению источника лазерного излучения относительно базового направления.
Введение определения углового положения источника лазерного излучения относительно базового направления позволяет определить угловое положение источника излучения в горизонтальной плоскости относительно направления, связанного с основанием.
Задание базового направления относительно основания позволяет рассчитать необходимую величину возмущающего воздействия, пропорциональную угловому положению источника излучения относительно базового направления ( αии , фиг. 3) с учетом угла рассогласования между нулевым и базовым направлением ( Δα - фиг. 2, 3).
После замены нулевого возмущающего воздействия возмущающим воздействием пропорциональным угловому положению источника лазерного излучения относительно базового направления, отклонение, обеспечивающее поворот прибора наблюдения, становится пропорционально текущему угловому положению линии визирования прибора наблюдения относительно направления на источник лазерного излучения.
В результате этой замены поворот прибора наблюдения производится до тех пор, пока отклонение не станет меньше заданной величины, т.е. до тех пор пока линия визирования прибора наблюдения не будет наведена на источник лазерного излучения в горизонтальной плоскости.
Технический результат достигается также тем, что в устройство наведения линии визирования прибора наблюдения на нулевое направление преимущественно прибора, выполненного с возможностью вращения вокруг своей оси относительно основания, содержащее блок задания режима наведения, сумматор, коммутатор, привод прибора наблюдения, механически соединенный с прибором наблюдения, датчик положения линии визирования прибора наблюдения, механически соединенный с основанием и с прибором наблюдения, при этом выход датчика положения линии визирования прибора наблюдения подключен к первому входу сумматора, выход которого через замыкающий контакт коммутатора подключен к входу привода прибора наблюдения, а выход блока задания режима наведения подключен к управляющему входу коммутатора, дополнительно введены второй коммутатор и последовательно соединенные датчик с пространственным кодированием угла прихода лазерного излучения, и блок определения углового положения источника лазерного излучения и задания поворота, аналоговый выход которого подключен к замыкающему контакту второго коммутатора, размыкающий контакт, коммутирующий контакт и управляющий вход которого подключены, соответственно, к общей цепи устройства, второму входу сумматора и ко второму выходу блока определения углового положения источника лазерного излучения и задания поворота, второй вход которого подключен к выходу блока задания режима наведения.
Введение датчика с пространственным кодированием угла прихода лазерного излучения и блока определения углового положения источника лазерного излучения и задания поворота обеспечивает определение углового положения источника лазерного излучения относительно базового направления, связанного с основанием. Блок определения углового положения источника лазерного излучения и задания поворота обеспечивает также расчет и формирование возмущающего воздействия и управление вторым коммутатором. Второй коммутатор обеспечивает замену в контуре управления приводом прибора наблюдения нулевого возмущающего воздействия на возмущающее воздействие, пропорциональное угловому положению источника лазерного излучения относительно базового направления.
В результате этой замены, привод прибора наблюдения отрабатывает сигнал отклонения, соответствующий угловому положению линии визирования в горизонтальной плоскости относительно направления на источник лазерного излучения, обеспечивая тем самым наведение в горизонтальной плоскости линии визирования прибора наблюдения на источник лазерного излучения.
На фиг. 1 приведена схема расположения сектора обзора датчика с пространственным кодированием угла прихода лазерного излучения относительно базового и нулевого направления.
На фиг. 1 введены следующие обозначения:
БН - базовое направление датчика лазерного излучения, связанное с основанием;
НН - нулевое направление прибора наблюдения, связанное с основанием;
θ - сектор обзора датчика лазерного излучения;
Δθ - дискрета определения углового положения источника излучения датчиком;
1, 2, . . .....,N - номера направлений на источник лазерного излучения, фиксируемые датчиком с пространственным кодированием угла прихода лазерного излучения.
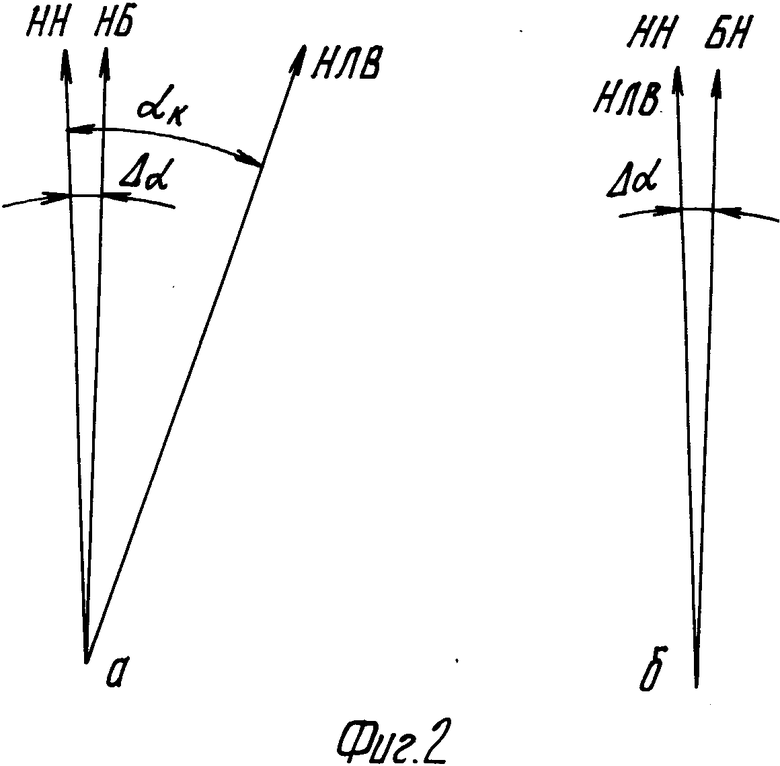
На фиг. 2 приведены схемы расположения линии визирования прибора наблюдения в горизонтальной плоскости относительно нулевого и базового направлений:
а) исходное состояние;
б) после наведения линии визирования прибора наблюдения на нулевое направление.
На фиг. 2 введены следующие обозначения:
αк - угловое положение линии визирования прибора наблюдения относительно нулевого направления;
ВПВ - горизонтальная проекция линии визирования прибора наблюдения.
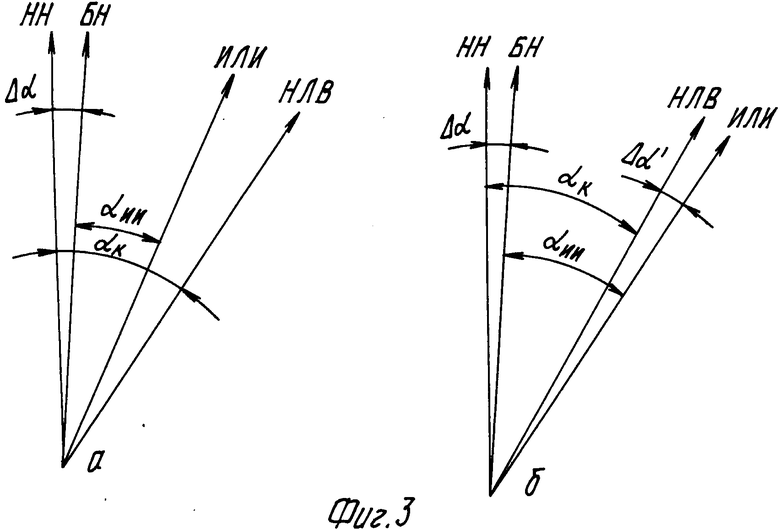
На фиг. 3 приведена схема расположения горизонтальной проекции линии визирования прибора наблюдения относительно направления на источник лазерного излучения.
На фиг. 3 введены следующие обозначения:
ИЛИ - направление на источник лазерного излучения;
Δα - угол рассогласования между нулевым и базовым направлением;
Δα′ - погрешность наведения линии визирования прибора наблюдения на источник лазерного излучения в горизонтальной плоскости.
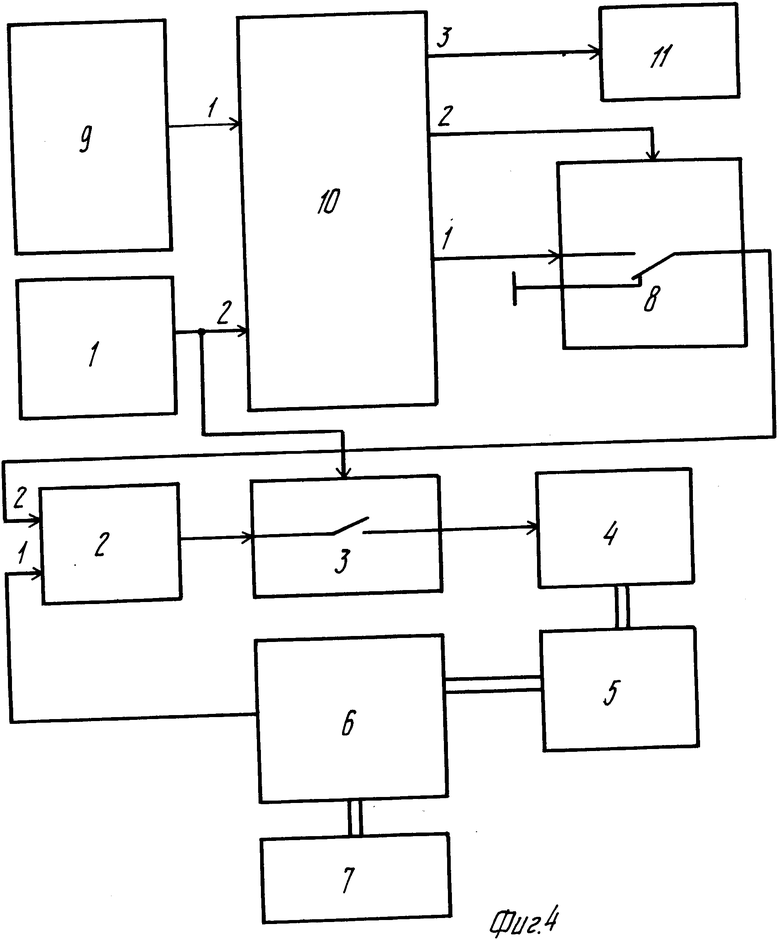
На фиг. 4 приведена блок-схема устройства наведения линии визирования прибора наблюдения на источник лазерного излучения.
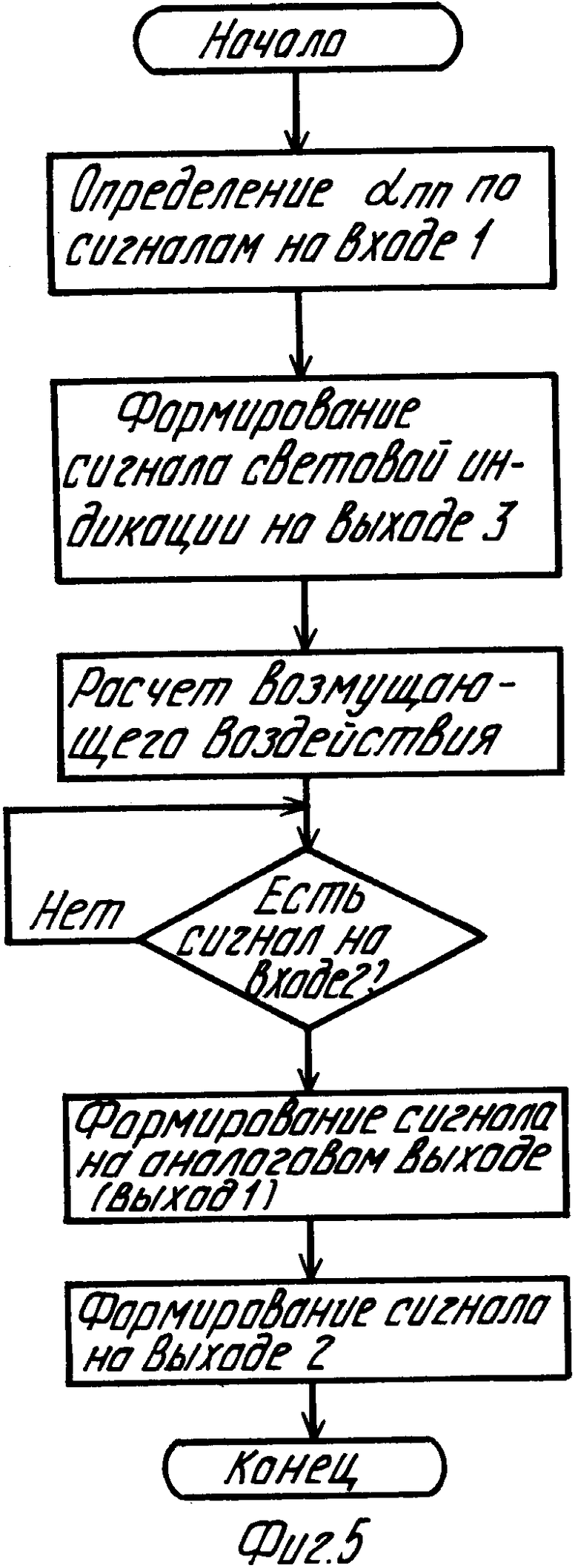
На фиг. 5 приведена блок-схема алгоритма работы блока определения углового положения источника лазерного излучения и задания поворота.
Пример осуществления способа.
Способ может быть реализован, например, на объекте, имеющим вращающийся относительно основания прибор наблюдения типа ПНК-4с с контуром управления замкнутым по углу, датчик с пространственным кодированием угла прихода лазерного излучения на двух точных головках типа ТШУ-I-II, расположенный на основании и блок определения углового положения источника лазерного излучения и задания поворота. Датчик имеет сектор обзора ±45o относительно базового направления, связанного с основанием. Базовое направление соответствует общей границе секторов обзора двух точных головок и совпадает с нулевым направлением с учетом погрешности задания на объекте нулевого и базового направления ( Δα - см.фиг.2 и фиг.3).
Дискрета определения направления на источник лазерного излучения 3,75 град, что соответствует двадцати четырем определяемым направлениям (см.фиг. 1). Каждому номеру направления соответствует двоичный код на выходе датчика.
При отсутствии лазерного излучения и замыкании контура управления приводом прибора наблюдения, поворот последнего осуществляется за счет отклонения, величина которого определяется как разность между возмущающим воздействием, соответствующим текущему угловому положению в горизонтальной плоскости линии визирования прибора наблюдения относительно нулевого направления и нулевым возмущающим воздействием, соответствующим угловому положению линии визирования, тождественному нулевому направлению. Поворот прибора наблюдения осуществляется до тех пор, пока отклонение не станет меньше заданной величины, при этом направление линии визирования прибора наблюдения в горизонтальной плоскости будет соответствовать нулевому направлению.
При приеме лазерного излучения по информации от датчиков с пространственным кодированием угла прихода лазерного излучения определяют угловое положение источника излучения в системе координат относительно базового направления связанного с основанием, а затем рассчитывают величину возмущающего воздействия, соответствующую этому угловому положению с учетом величины между нулевым и базовым направлением. Если датчик лазерного излучения установлен на объекте таким образом, что базовое направление совпадает или параллельно нулевому направлению, то значение принимают равным нулю. После этого замыкают контур управления приводом прибора наблюдения и одновременно производят замену нулевого возмущающего воздействия возмущающим воздействием соответствующим расчетному значению.
В результате этой замены отклонение, обеспечивающее поворот прибора наблюдения, становится пропорционально текущему угловому положению линии визирования прибора наблюдения относительно направления на источник излучения. Знак отклонения обеспечивает поворот прибора наблюдения в кратчайшем направлении на источник излучения.
Поворот прибора наблюдения продолжается до тех пор, пока отклонение не станет меньше заданной величины, при этом линия визирования будет наведена в горизонтальной плоскости на источник лазерного излучения (см.фиг.3) с учетом погрешности наведения Δα , которая зависит в основном от величины Δα , и от дискреты датчика лазерного излучения Δα′ .
Устройство наведения линии визирования прибора наблюдения на источник лазерного излучения преимущественно прибора, выполненного с возможностью вращения вокруг своей оси относительно основания содержит блок 1 задания режима наведения, сумматор 2, коммутатор 3, привод 4 прибора наблюдения, механически соединенный с прибором 5 наблюдения, датчик 6 положения линии визирования прибора 5, механически соединенный с основанием 7 и с прибором 5, при этом выход датчика 6 подключен к первому входу сумматора 2, выход которого через замыкающий контакт коммутатора 3 подключен к входу привода 4, при этом выход блока 1 подключен к управляющему входу коммутатора 3. Кроме того, устройство наведения линии визирования прибора наблюдения на источник лазерного излучения содержит второй коммутатор 8 и последовательно соединенные датчик 9 с пространственным кодированием угла прихода лазерного излучения, блок 10 определения углового положения источника лазерного излучения и задания поворота, аналоговый выход которого подключен к замыкающему контакту коммутатора 8, размыкающий контакт, коммутирующий контакт и управляющий вход которого подключены, соответственно, к общей цепи устройства, второму входу сумматора и ко второму выходу блока 10, второй вход которого подключен к выходу блока 1.
Кроме того, устройство наведения линии визирования прибора наблюдения содержит табло 11 световое, подключенное к третьему выходу блока 10.
Устройство наведения линии визирования прибора наблюдения на источник лазерного излучения работает следующим образом.
В исходном состоянии коммутатор 3 разомкнут, что обеспечивает разомкнутое состояние контура управления приводом 4, состоящего из прибора 5, датчика 6, сумматора 2, коммутатора 3 и привода 4. При осуществлении режима наведения линии визирования прибора 5 на нулевое направление (при отсутствии информации от датчика 9) по команде оператора сигнал с блока 1 обеспечивает переключение коммутатора 3, который замыкает по углу контур управления приводом 4.
Сигнал отклонения формируется на выходе сумматора 2, как разность между сигналом с датчика 6, соответствующего текущему угловому положению горизонтальной плоскости линии визирования прибора 5, и сигналом уровнем не более 200 мВ, соответствующим угловому положению линии визирования прибора 5, тождественному нулевому направлению.
В результате прибор 5 поворачивается относительно основания 7 под действием сигнала отклонения до тех пор, пока этот сигнал на выходе сумматора 2 не станет меньше заданной величины, при этом направление в горизонтальной плоскости линии визирования прибора 5 будет соответствовать нулевому направлению.
При приеме датчиком 9 лазерного излучения кодовый сигнал, соответствующий номеру направления па источник лазерного излучения относительно базового направления (см. фиг. 1) поступает в блок 10. Здесь производится (см.фиг.5) определение углового положения источника лазерного излучения относительно базового направления ( Δα - см.фиг.3) и производится расчет возмущающего воздействия - значения напряжения, соответствующего углу Δθ . Одновременно блок 10 формирует сигнал на табло 11 о факте приема лазерного излучения и направлении на источник излучения.
При необходимости наведения линии визирования прибора 5 на источник лазерного излучения по команде оператора сигнал блока 1 поступает в блок 10 и обеспечивает с помощью коммутатора 3 замыкание по углу контура управления приводом 4 на время действия сигнала с блока 1.
Блок 10 по этому сигналу формирует на выходе 2 сигнала управления коммутатором 8, а на аналоговом выходе 1 сигнал пропорциональный углу αии . В результате на второй вход сумматора 2 вместо сигнала уровнем, соответствующим нулевому направлению, поступает сигнал, пропорциональный углу αии , а на выходе сумматора 2 формируется сигнал, пропорциональный разности углов αии . Привод 4 отрабатывает этот сигнал, обеспечивая поворот прибора 5 относительно основания 7 в направлении на источник лазерного излучения до тех пор, пока сигнал отклонения на выходе сумматора 2 не станет меньше заданной величины. При этом линия визирования прибора 5 будет наведена в горизонтальной плоскости на источник лазерного излучения с учетом погрешности наведения αии .
Блок 1 может быть выполнен на кнопочном переключателе типа ПкН2- 1Т.
Коммутатор 3 может быть выполнен на реле типа РЭС-55.
В качестве привода 4 может быть использован привод типа 1ЭЦ29.
В качестве прибора 5 наблюдения может быть использован прибор наблюдения типа ПНК-4с.
В качестве датчика 6 может быть использован вращающийся трансформатор 2,5 Вт, входящий в состав системы 1ЭЦ29, статор которого механически соединен с основанием 7, а ротор механически соединен с прибором 5.
Коммутатор 8 может быть на реле типа РЭС-55.
В качестве датчика 9 могут быть использованы две точные головки типа ТШУ-I-II.
Блок 10 представляет собой микропроцессорную систему, реализованную по типовому модульному принципу и имеющую магистральную структуру связи межу устройствами системы [8. черт.67], при этом устройство вывода, выход которого является аналоговым выходом блока 9, представляет собой цифро-аналоговой преобразователь на микросхеме 572ПВ1, подключенный к магистрали микропроцессорной системы.
Световое табло 11 может быть выполнено на единичных индикаторах типа ЗЛ341Б.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ НАВЕДЕНИЯ ЛИНИИ ВИЗИРОВАНИЯ ПРИБОРА НАБЛЮДЕНИЯ НА ИСТОЧНИК ЛАЗЕРНОГО ИЗЛУЧЕНИЯ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1994 |
|
RU2082069C1 |
| СПОСОБ НАВЕДЕНИЯ ЛИНИИ ВИЗИРОВАНИЯ ПРИЕМОПЕРЕДАТЧИКОВ АТМОСФЕРНОЙ ОПТИЧЕСКОЙ ЛИНИИ СВЯЗИ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2020 |
|
RU2774839C2 |
| УСТРОЙСТВО ДЛЯ ЗАПУСКА РАКЕТЫ С ВЕРТОЛЕТА | 1995 |
|
RU2087831C1 |
| СПОСОБ НАВЕДЕНИЯ | 1997 |
|
RU2118784C1 |
| СПОСОБ ФОРМИРОВАНИЯ КОМАНД УПРАВЛЕНИЯ ВРАЩАЮЩЕЙСЯ РАКЕТОЙ, НАВОДЯЩЕЙСЯ ПО ЛУЧУ, И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1997 |
|
RU2114372C1 |
| УСТРОЙСТВО ОПРЕДЕЛЕНИЯ ОРИЕНТАЦИИ ОСИ ВИЗИРА | 2001 |
|
RU2227924C2 |
| СИСТЕМА УПРАВЛЕНИЯ ТЕЛЕВИЗИОННЫМ ВИДЕОСПЕКТРАЛЬНЫМ КОМПЛЕКСОМ КОСМИЧЕСКОГО АППАРАТА | 1992 |
|
RU2068801C1 |
| СЛЕДЯЩАЯ ОПТИКО-ЭЛЕКТРОННАЯ СИСТЕМА | 2001 |
|
RU2211462C2 |
| ОПТИКО-ЭЛЕКТРОННАЯ СИСТЕМА ПОИСКА И СОПРОВОЖДЕНИЯ | 2001 |
|
RU2212687C2 |
| СПОСОБ ЮСТИРОВКИ НАШЛЕМНОЙ СИСТЕМЫ ВИЗИРОВАНИЯ | 2002 |
|
RU2251720C2 |
Изобретение относится к области наведения, в частности к наведению вертикальной плоскости визирования прибора наблюдения на источник лазерного излучения. Техническим результатом является наведение вертикальной плоскости визирования прибора наблюдения на источник лазерного излучения. Существо изобретения заключается в определении отклонения текущего углового положения вертикальной плоскости визирования прибора наблюдения относительно нулевого направления, являющегося полярной осью связанной с платформой первой плоскостной полярной системы координат, полюс которой совпадает с осью вращения прибора наблюдения, и повороте прибора наблюдения до тех пор, пока отклонение не станет меньше заданной величины, при этом отклонение определяют как разность между возмущающим воздействием, соответствующим текущему угловому положению вертикальной плоскости визирования прибора наблюдения относительно нулевого направления и нулевым возмущающим воздействием, соответствующим угловому положению вертикальной плоскости визирования тождественному нулевому направлению, кроме того дополнительно определяют угловое положение источника лазерного излучения относительно базового направления датчика лазерного излучения, являющегося полярной осью, связанной с платформой второй плоскостной полярной системы координат, полюс которой принимают совпадающим с полюсом первой системы координат, рассчитывают величину возмущающего воздействия, соответствующую угловому положению источника лазерного излучения во второй системе координат и производят замену нулевого возмущающего воздействия, возмущающим воздействием пропорциональным расчетному значению. 2 с. и 1 з.п.ф-лы, 5 ил. ЫB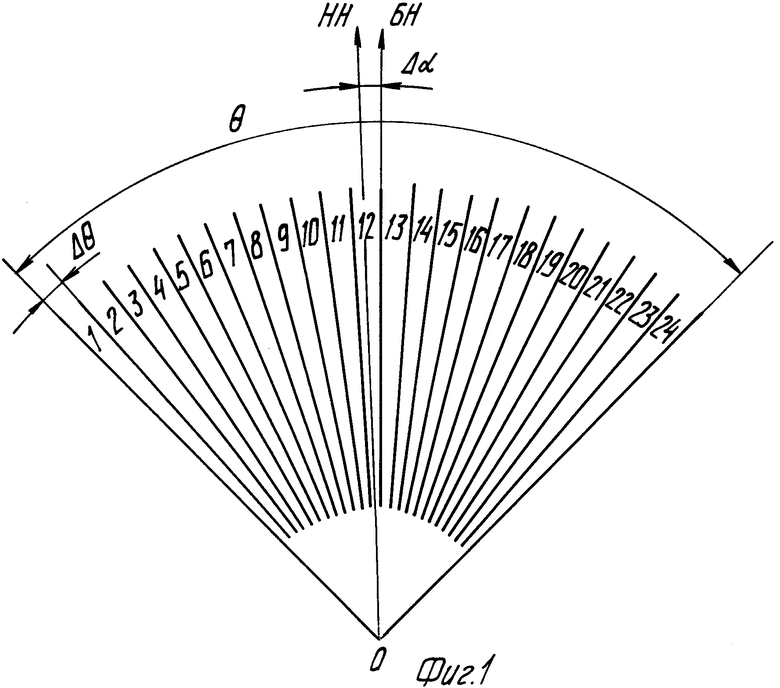
| В.В.Корнеев и др | |||
| Электроавтоматика и электрооборудование танков | |||
| Ч | |||
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Электроавтоматика | |||
| - М.: Издание военной академии бронетанковых войск, 1964 | |||
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Разработка СКБ "Ротор", 1985. | |||

