Изобретение относится к подводному судостроению, а именно: к необитаемым подводным аппаратам (НПА), в частности к управляемым по кабелю самоходным НПА, предназначенным для осмотра при обследовании подводных объектов и локальных районов дна.
Известен НПА (типа КУРВ III, КУРВ IV), имеющий раму, корпус прямоугольной формы, в верхней части которого размещены емкости положительной плавучести (см. Необитаемые подводные аппараты. Под общей ред. Сытина А.В. -М.: Воениздат, 1975, с.21, рис. 1.6). В этих аппаратах в носовой части корпуса смонтированы телеаппаратура и источники света. Аппарат имеет два маршевых движителя и один маневровый, установленный в вертикальной плоскости. Питание механизмов и систем и управление ими осуществляется по закрепленному в верхней части корпуса кабель-тросу. Снизу на раме смонтирован манипулятор. Такая конструкция НПА имеет ряд недостатков, ограничивающих его технологические возможности. К таким недостаткам относятся, в первую очередь, низкие ходовые и маневренные качества, особенно низкая устойчивость на курсе, что характерно для тел малого удлинения с плохообтекаемой формой. Сюда же следует отнести и невозможность полноценного движения лагом, вследствие отсутствия лагового движителя.
Указанные недостатки проявляются в невозможности выполнения таких операций, как осуществление кругового осмотра, необходимого, например, при монтаже морских самоподъемных платформ и т.д. Кроме того, расположение телеаппаратуры только спереди корпуса резко ограничивает информационные возможности НПА, не позволяя осуществлять одновременное наблюдение за внешней обстановкой с разных сторон от НПА. Далее указанное верхнее закрепление кабель-троса приводит к значительным возмущениям от него, что отрицательно влияет на стабильность положения НПА и плавность осмотра объекта.
Некоторые из отмеченных недостатков устранены в НПА, выбранном в качестве прототипа настоящего изобретения (см. заявку Великобритании N 2177352, кл. B 63 G 8/00, 1987). Этот НПА следующего поколения, для которых характерно наличие обтекаемого легкого корпуса сплющенной формы, охватывающего систему прочных корпусов сферической и/или цилиндрической формы, в носовой оконечности которых размещена с возможностью поворота в диаметральной плоскости телекамера, а на корпусе жестко закреплен источник света. Манипулятор закреплен на внешней подвеске в носовой части корпуса. Два маршевых движителя смонтированы в трубах и размещены в кормовой части прочных корпусов. Система маневровых движителей состоит из двух вертикальных движителей и одного лагового, смонтированных в каналах, проходящих через корпуса НПА. Кабель-трос механически закреплен в верхней части НПА между легкими и прочными корпусами. Данный НПА обладает лучшими ходовыми, прочностными и информационными свойствами, обусловленными формой корпусов, схемой движительно-рулевого комплекса и подвижным креплением телекамеры. Однако и этот НПА характеризуется такими серьезными недостатками, как пониженная скорость на заднем ходу и низкая устойчивость по курсу, что является следствием различной тяги маршевых движителей вперед и назад. Далее, большая площадь ватерлинии наряду с высоким сопротивлением в вертикальном направлении требуют мощных вертикальных движителей, которые обеспечивают хорошую поворотливость НПА на месте, но совершенно недостаточную в движении. Это обстоятельство привело к необходимости оснащения НПА горизонтальными рулями, осложнив тем самым конструкцию движительно-рулевого комплекса. Наличие единственной телекамеры ограничивает информационные возможности НПА, а жесткое крепление источника света ухудшает освещенность кадра при конечных положениях телекамеры. Верхнее крепление кабель-троса на корпусах НПА является причиной возмущений, ухудшая показатели стабильности последнего, а кроме того, не гарантирует узел крепления от возможных повреждений при работе так же, как и недостаточная защита рабочих органов маршевых движителей вследствие их открытого положения в насадках. Все вышесказанное снижает технологические возможности и надежность НПА.
Технической задачей, решаемой настоящим изобретением, является создание надежного НПА с повышенными технологическими возможностями. Данная техническая задача решается путем выбора выгодной схемы движительно-рулевого комплекса, а точнее, путем оптимизации распределения мощностей движителей комплекса по маршевому, вертикальному и лаговому направлениям (для всех видов движителей применены одинаковые водометы, а разница в мощности определяется лишь количеством движителей по каждому направлению), в совокупности с рациональной формой корпусов НПА, размещением телекамер, источников света и узла крепления кабель-троса.
Конкретно технический результат, заключающийся в повышении ходовых и гидродинамических качеств НПА, обеспечивается двухрядным расположением четырех маршевых движителей симметрично относительно диаметральной плоскости во введенных каналах по одному сверху и снизу относительно каждого прочного корпуса, причем упомянутые каналы смонтированы на упомянутых корпусах в осевом направлении симметрично относительно плоскости мидель-шпангоута, канала вертикального движителя - по линии пересечения плоскостей мидель-шпангоута и диаметральной, а каналов лаговых движителей - симметрично относительно плоскости мидель-шпангоута по обеим сторонам канала вертикального движителя, между нижним рядом каналов маршевых движителей и средними частями прочных корпусов, которые при этом выполнены цилиндрической формы с диаметром, меньшим, чем диаметр концевых частей корпусов, и расположены эксцентрично относительно упомянутых частей.
Приведенная совокупность признаков обеспечивает компактное взаиморасположение основных объемных элементов НПА - прочных корпусов и движителей, что позволяет скомпоновать их в легком корпусе с приданием последнему формы чечевицы с трехплоскостной симметрией относительно теоретических плоскостей. При этом обеспечиваются оптимальные гидродинамические качества НПА, причем в маршевом и вертикальном направлениях линия действия усилия движителей проходит через центр давления корпуса (в силу симметричности последнего и расположения этих движителей). В лаговом направлении центр давления смещен вниз от плоскости максимальной ватерлинии, поскольку опорные лыжи обладают в данном направлении значительным сопротивлением. Смещение лаговых движителей ниже упомянутой плоскости (благодаря размещению их между нижним рядом маршевых движителей и средними частями прочных корпусов, специально обниженными в этом месте) позволяет свести к минимуму расстояние от центра давления до линии действия усилия лаговых движителей.
Частные отличительные признаки, заключающиеся в установке под углом лопаток решеток каналов лаговых движителей, а также в предварительной угловой ориентации решеток этих каналов, направлены на точную регулировку компенсации несовпадения центра давления НПА и линии действия усилия движителей. В лаговом направлении такое несовпадение является величиной непостоянной, поскольку зависит от формы сменного навесного оборудования. Кроме того, указанные признаки позволяют исключить необходимость применения в НПА подруливающих устройств, упростив тем самым его конструкцию. Следующие частные отличительные признаки - размещение вертикального движителя в канале ниже центра масс НПА, а также крепление в этом канале кабель-троса на уровне размещения центра масс позволяют свести к минимуму возмущения от кабель-троса и надежно защитить последний от повреждения в результате внешних механических воздействий. Остальные частные признаки, касающиеся оснащения прочных корпусов НПА торцевыми полусферическими иллюминаторами, диаметр которых равен диаметру концевых участков, на которых они смонтированы, а также размещение в каждом из упомянутых участков телекамер, установленных на шарнире, вместе с оснащением НПА по меньшей мере двумя шарнирно закрепленными источниками света, расположенными в диаметральной плоскости между упомянутыми участками, обеспечивают получение всесторонней видеоинформации об объекте без разворота НПА, что значительно упрощает и сокращает процесс осмотра объекта. Кроме того, наличие двух телекамер с каждой стороны НПА позволяет получить стереоскопическое изображение, что значительно обогащает получаемую информацию.
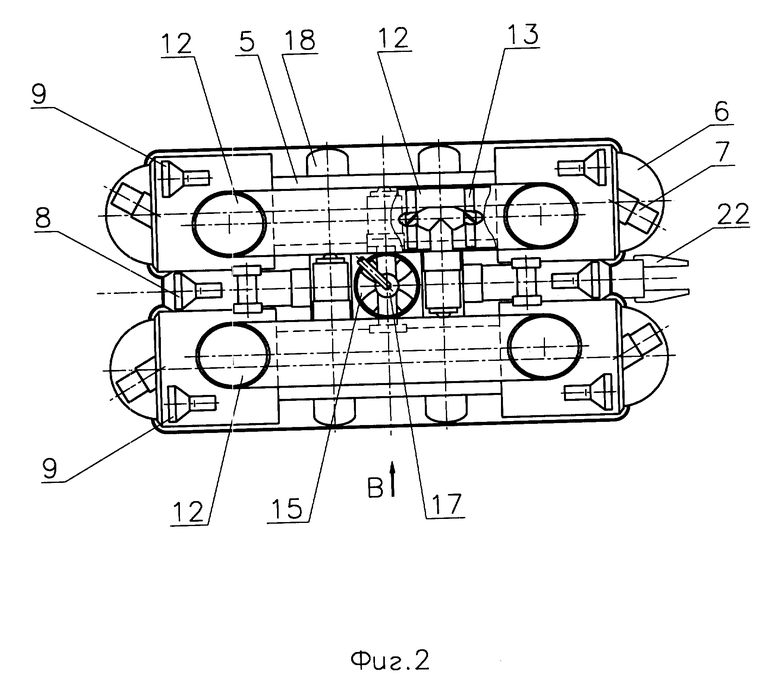
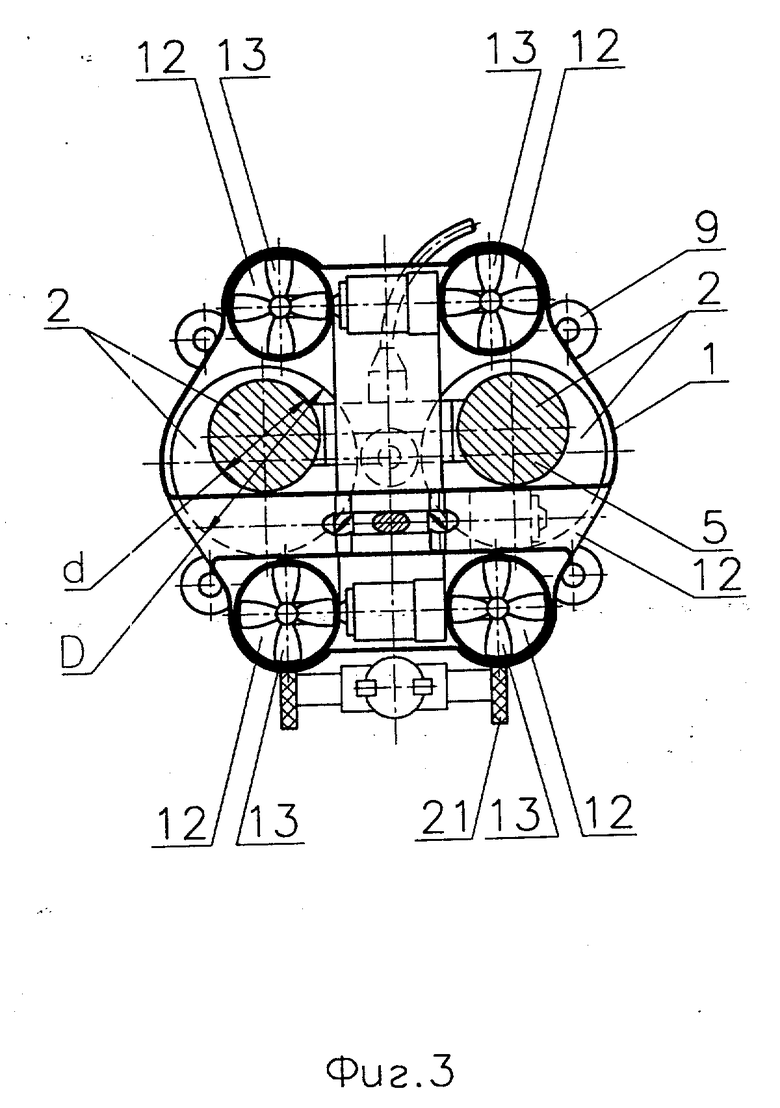
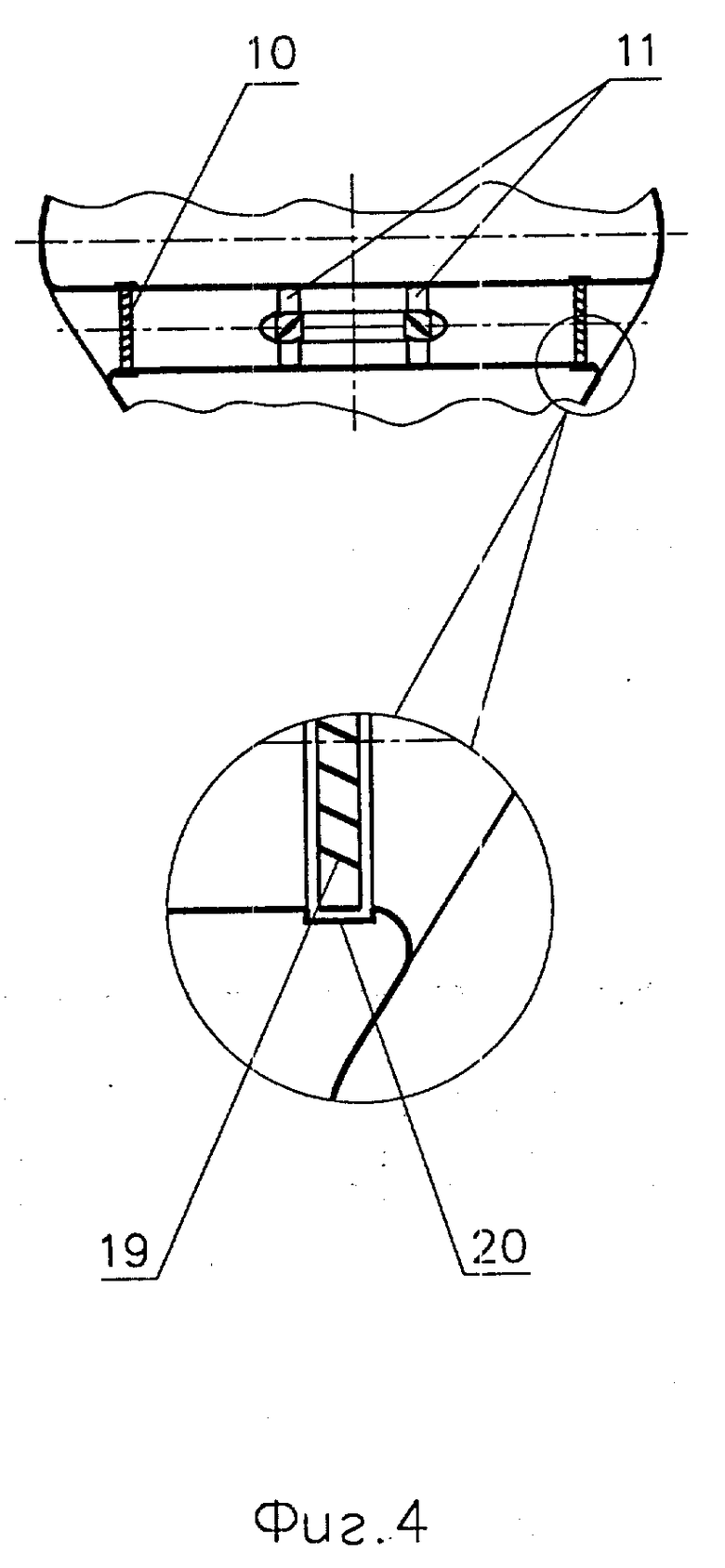
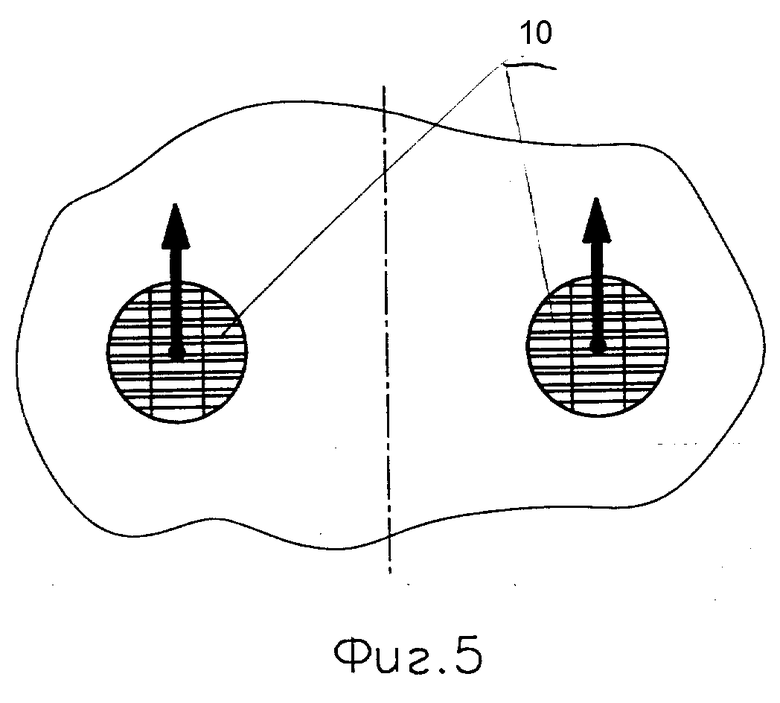
На фиг. 1 представлен продольный разрез НПА (по диаметральной плоскости); на фиг. 2 - вид НПА сверху; на фиг. 3 - поперечный разрез НПА; на фиг. 4 - разрез А-А на фиг. 3; на фиг. 5-7 - вид В на фиг. 2 при различном угловом положении направляющих решеток в каналах лаговых движителей.
НПА, выполненный согласно изобретению, содержит легкий корпус 1 в форме чечевицы, имеющий трехплоскостную симметрию, т.е. симметричных относительно основных плоскостей: максимальной ватерлинии, мидель-шпангоута и диаметральной. Корпус 1 охватывает два одинаковых прочных корпуса 2, расположенных побортно (по катамаранной схеме) симметрично относительно диаметральной плоскости (фиг. 2). Прочные корпуса 2 (фиг. 1) состоят из носовых и кормовых концевых сфероцилиндрических участков 3 и 4 соответственно и средней цилиндрической части 5. Для удобства компоновки средняя часть 5 имеет диаметр d (фиг. 1, 3) меньший, чем диаметр D концевых участков 3 и 4 (т.е. d < D). При этом геометрическая ось части 5 параллельна геометрической оси участков 3 и 4 и лежит выше последней на расстоянии h. Участки 3 и 4 снабжены полусферическими иллюминаторами 6 (фиг. 1, 2), с диаметром Dк предпочтительно равным диаметру D участков 3 и 4. За иллюминаторами 6 находятся четыре (по одной в каждом отсеке участков 3 и 4) телекамеры 7, установленные с возможностью угловых перемещений в вертикальной плоскости и плоскости максимальной ватерлинии. Такое перемещение может быть осуществлено путем установки камер 7, например, на универсальном шарнире (не показано). Между прочными корпусами 2 смонтированы два поворотных источника света 8, установленные аналогично камерам 7. Кроме того, в зоне каждого из концевых участков 3 и 4 установлено по два неподвижных источников света 9 для освещения бокового и переднего пространства. Движительно-рулевой комплекс НПА состоит из семи идентичных движителей, расположенных в соответствующих каналах между решетками 10 (фиг. 4). Все движители представляют собой одинаковые полнонапорные водометы с двумя винтами 11 противоположного направления, а каналы выполнены в виде прямоточных труб, образованных в легком корпусе 1 (фиг. 1). Так, четыре канала 12 (фиг. 2, 3) маршевых движителей расположены попарно симметрично относительно каждого прочного корпуса 2, образуя верхний 13 (фиг. 3) и нижний 14 ряды упомянутых движителей, примыкающие соответственно сверху и снизу к прочным корпусам 2. Каналы 12 упомянутых движителей в осевом направлении размещены симметрично относительно плоскости мидель-шпангоута (фиг. 1, 2). Канал 15 вертикального движителя 16 выполнен по линии пересечения плоскости мидель-шпангоута и диаметральной плоскости, причем собственно движитель 16 (водомет) смонтирован в канале 15 ниже центра масс (точка О на фиг. 1), а узел 17 крепления кабель-троса расположен на упомянутом центре масс НПА (точнее - максимально приближен к центру масс, т.к. последний может незначительно изменять свое положение вследствие различной массы сменного оборудования, в то время как узел 17 закреплен в постоянной точке). Каналы 18 двух лаговых движителей расположены симметрично относительно плоскости мидель-шпангоута, примыкая с обеих сторон к каналу 15 вертикального движителя. При этом каналы 18 размещены между каналами 12 нижнего ряда 14 (фиг. 3) маршевых движителей и средними цилиндрическими частями 5 прочных корпусов 2 и также примыкают к упомянутым элементам. Вертикальный и маршевые движители размещены в соответствующих каналах, как это уже указывалось, между решетками с прямыми лопатками (не показаны), а в каналах 18 лаговых движителей установлены решетки 10 (фиг. 4) с наклонными лопатками 19. Упомянутые лопатки могут быть закреплены на подвижном кольце, установленном с возможностью угловых установочных перемещений в канале в круговых направляющих 20, благодаря чему решетки 10 могут занимать заранее определенное положение (фиг. 5-7). Снизу на прочных корпусах 2 закреплены две опорных лыжи 21 (фиг. 1), на которых смонтирован сменный манипулятор 22.
Работы с НПА, выполненным согласно изобретению, во многом зависят от осматриваемого объекта и могут быть произведены, например, следующим образом. Перед спуском на воду аппарат подготавливают к работе в конкретных условиях: устанавливают требуемые манипулятор 22, телекамеры 7 и источники света 8 и 9, выбирая последние по мощности, углу освещения и спектру излучаемого света. Оценив сопротивление сменных наружных элементов НПА, определяют положение центра давления при лаговом перемещении и исходя из этого производят угловую установку решеток 10 в круговых направляющих 20 каналов 18 лаговых движителей таким образом, чтобы максимально приблизить линию действия усилия этих движителей к центру давления и тем самым приблизить траекторию лагового хода НПА к горизонтальной прямой линии. При этом носовая и кормовая решетки 10 должны быть расположены симметрично, т.е. повернуты на одинаковый угол, но в противоположных направлениях. Затем обладающий некоторой положительной плавучестью аппарат спускают на воду и включением маршевых и лаговых движителей выводят в район производства осмотровых работ. Погружение (или подъем) НПА производится в обычном режиме - включением вертикального движителя, имеющего сравнительно низкую мощность по отношению к маршевым движителям, или в экстренном режиме - включением маршевых движителей (имеющих значительно большую суммарную мощность) с дифферентом. Глубина погружения контролируется навигационными приборами, размещенными в прочных корпусах. Необходимое при осмотре маневрирование осуществляют путем комбинации работы различных движителей: маршевых (порядно или побортно) и лаговых с вращением в одну или разные стороны, а при необходимости и вертикального.
| название | год | авторы | номер документа |
|---|---|---|---|
| НЕОБИТАЕМЫЙ ПОДВОДНЫЙ АППАРАТ | 1997 |
|
RU2115586C1 |
| НЕОБИТАЕМЫЙ ПОДВОДНЫЙ АППАРАТ | 2008 |
|
RU2434780C2 |
| ПОДВОДНОЕ СУДНО ДЛЯ ОБСЛУЖИВАНИЯ ПОДВОДНЫХ ДОБЫЧНЫХ КОМПЛЕКСОВ НА АРКТИЧЕСКОМ ШЕЛЬФЕ И ДРУГИХ ПОДВОДНО-ТЕХНИЧЕСКИХ РАБОТ | 2016 |
|
RU2629625C1 |
| Подводный поисковый аппарат | 2023 |
|
RU2805898C1 |
| МАЛОГАБАРИТНЫЙ ТЕЛЕУПРАВЛЯЕМЫЙ ПОДВОДНЫЙ АППАРАТ | 2008 |
|
RU2387570C1 |
| Спускоподъёмное устройство безэкипажного катера для необитаемого подводного аппарата | 2020 |
|
RU2757036C1 |
| СПОСОБ СПАСЕНИЯ ЛЮДЕЙ ИЗ ОТСЕКОВ ОПРОКИНУВШЕГОСЯ КОРАБЛЯ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2001 |
|
RU2275311C2 |
| Малогабаритный телеуправляемый подводный аппарат | 2021 |
|
RU2775894C1 |
| РАСШИРИТЕЛЬ | 1998 |
|
RU2134765C1 |
| Комплекс для осуществления подводных работ | 2022 |
|
RU2785237C1 |
Изобретение относится к подводному судостроению. Необитаемый подводный аппарат (НПА) предназначен для осмотра при обследовании подводных объектов и локальных районов дна. НПА содержит 4 маршевых движителя, смонтированных в каналах, расположенных симметрично и порядно относительно прочных корпусов, один вертикальный движитель, смонтированный ниже центра масс в канале, расположенном по линии пересечения плоскости мидель-шпангоута и диаметральной. Узел крепления кабель-тросса расположен в зоне центра масс НПА. Два движителя лагового хода смонтированы в каналах, расположенных симметрично относительно мидель-шпангоута и примыкающих с противоположных сторон к каналу движителя вертикального хода. Эти каналы размещены между двумя нижними каналами и средними частями прочных корпусов, которые выполнены меньшего диаметра, чем концевые участки корпусов. Легкий корпус имеет форму чечевицы с трехплоскостной симметрией. Все движители размещены в каналах между решетками с лопатками, которые только в каналах движителей лагового хода установлены с возможностью поворота в направляющих. Концевые участки прочного корпуса снабжены полусферическими иллюминаторами, за которыми на универсальных шарнирах расположены телекамеры. Снаружи размещены поворотные и жестко закрепленные источники света. 7 з.п. ф-лы, 7 ил.
| GB, заявка, 2177352, кл | |||
| Способ приготовления сернистого красителя защитного цвета | 1915 |
|
SU63A1 |
