Использование: для патрулирования локальных подводных районов и первичного обследования обнаруженных объектов.
Сущность: Необитаемый подводный аппарат (НПА) имеет хорошо обтекаемый веретенообразный корпус с двумя движителями в виде винтов с возможностью управления циклическим и общим шагом. Один из которых представляет из себя маршевый винт, ось которого расположена вдоль строительной горизонтали НПА. Второй движитель действует только при снижении скорости движения до очень малых скоростей или при полном отсутствии горизонтальной скорости НПА и представляет собой винт, ось вращения которого расположена перпендикулярно строительной горизонтали НПА. При движении с крейсерской скоростью этот винт неподвижен и представляет собой х-образную систему горизонтальных управляемых рулей. Подбирая соответствующую геометрию корпуса и лопастей винтов, можно получить низкий уровень шума НПА, что позволит использовать его в качестве разведывательного комплекса или высокоманевренной самонаводящейся мины.
ОПИСАНИЕ ИЗОБРЕТЕНИЯ
Изобретение относится к подводному судостроению.
Известна установка патент RU 2104210 С1, кл. 6 В63G 8/00 (1), содержащая НПА, которая содержит 4 маршевых движителя, смонтированных в каналах, расположенных симметрично и порядно относительно прочных корпусов, один вертикальный движитель, смонтированный ниже центра масс в канале, расположенном по линии пересечения плоскости мидель-шпангоута и диаметральной. Узел крепления кабель-тросса расположен в зоне центра масс НПА. Два движителя лагового хода смонтированы в каналах, расположенных симметрично относительно мидель-шпангоута и примыкающих с противоположных сторон к каналу движителя вертикального хода. Эти каналы размещены между двумя нижними каналами и средними частями прочных корпусов, которые выполнены меньшего диаметра, чем концевые участки корпусов. Легкий корпус имеет форму чечевицы с трехплоскостной симметрией. Все движители размещены в каналах между решетками с лопатками, которые только в каналах движителей лагового хода установлены с возможностью поворота в направляющих. К недостаткам данной установки можно отнести малую энергетическую эффективность вследствие большого числа движителей, неоптимальности формы для малого сопротивления движению и как следствие высокий акустический шум.
Известна установка патент RU 97103353/28, кл. B63G 8/00, 1997. Высокомансвренный автономный необитаемый подводный аппарат, содержащий корпус аппарата и движительную установку, включающую группу из трех или четырех кормовых маршевых реверсивных движителей, расположенных под углом к продольной оси аппарата, и группу носовых подруливающих водометных движителей, расположенных в поперечной плоскости аппарата, отличающийся тем, что в поперечной плоскости корпуса аппарата в качестве подруливающих движителей носовой группы установлены вертикальный и лаговый реверсивные водометные движители со сквозными в корпусе аппарата водоводами, при этом водовод каждого движителя выполнен в виде V-образного канала, состоящего из одного цилиндрического и двух раздельных каналов, причем в цилиндрической части V-образного канала установлен гребной винт, а электродвигатель для привода последнего размещен в корпусе аппарата непосредственно между двумя раздельными каналами и кинематически связан с гребным винтом. Конструкция этого НПА по совокупности существенных признаков и технической сущности наиболее близка к данному изобретению и выбрана поэтому в качестве прототипа. К недостаткам данной установки можно отнести наличие только управляющих сил и отсутствие управляющих моментов от движителей в каналах, что особенно необходимо для маневрирования при отсутствии хода, а также малую энергетическую эффективность вследствие большого числа движителей малого диаметра и высокий акустический шум вследствие высоких оборотов их работы.
В настоящем изобретении НПА имеет хорошо обтекаемый веретенообразный корпус, что позволяет перемещаться под водой с минимальными энергетическими затратами. Два движителя в виде винтов с возможностью управления циклическим и общим шагом обеспечивают НПА управлением. Винт с горизонтальной осью представляет из себя маршевый движитель. Винт с вертикальной осью действует только при снижении скорости движения до очень малых скоростей или при отсутствии горизонтальной скорости НПА. При движении с крейсерской скоростью этот винт неподвижен и представляет собой х-образную систему горизонтальных управляемых рулей. Вследствие этого аппарат, с одной стороны, требует минимальных энергетических затрат для движения в крейсерских режимах и, с другой стороны, остается высоко маневренным средством на малых скоростях движения в случае необходимости первичного обследования обнаруженных объектов. Конструкция корпуса позволяет размещение как исследовательского оборудования, так и боевой части.
Таким образом, по сравнению с ближайшим аналогом данное изобретение обладает новизной, причем совокупность отличительных признаков не следует явным для специалиста образом из источников, соответствующих уровню современной техники. Что касается промышленной применимости, то она доказывается приведенным описанием и применением настоящего изобретения в одном из проектов автора. Следовательно, данное изобретение соответствует всем трем условиям патентоспособности.
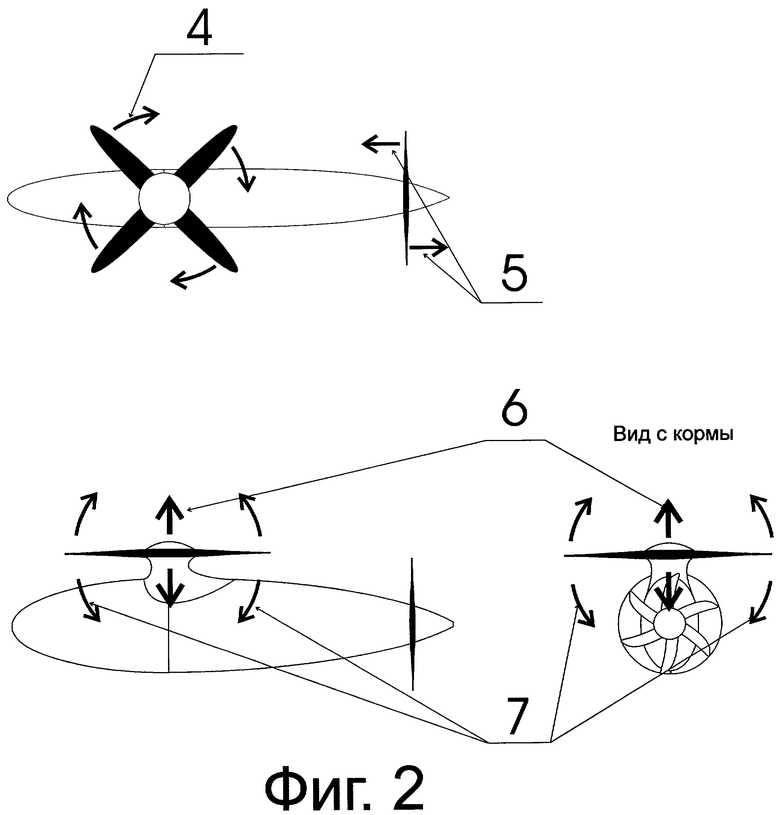
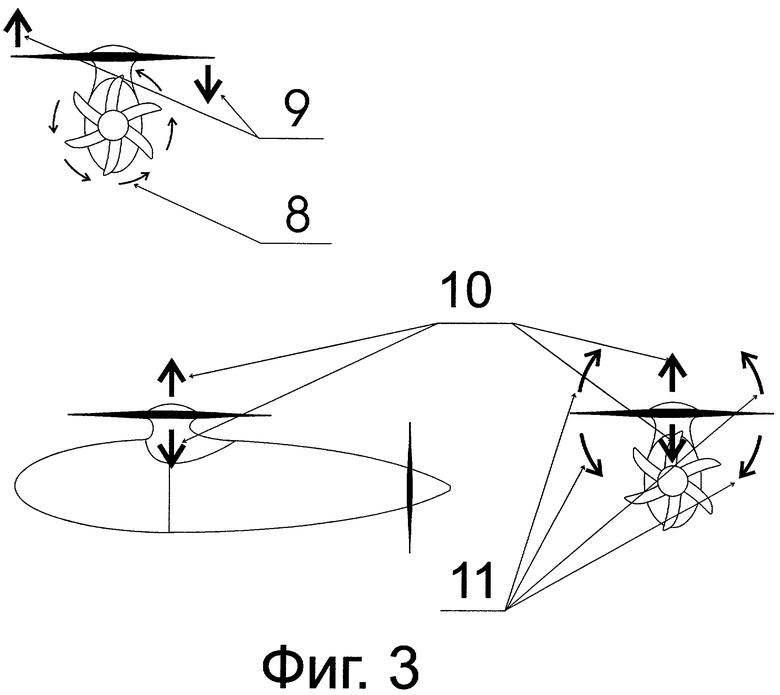
На фиг.1 приведен возможный общий вид НПА. На фиг.2 схема работы движителей НПА на режимах малого и отсутствия хода. На фиг.3 показана схема работы маршевого движителя и системы х-образных горизонтальных рулей в крейсерском режиме.
Позиции на фиг.1, 2 и 3 означают: 1 - корпус НПА, 2 - маршевый движитель, 3 - х-образная система горизонтальных рулей, 4 - направление вращения горизонтальных рулей, 5 - направление сил на секторах маршевого винта необходимых для компенсации реактивного момента от вращающейся системы горизонтальных рулей, 6 - возможные направления действия сил от вращающихся горизонтальных рулей, 7 - возможные направления действия моментов от вращающихся горизонтальных рулей, 8 - направление вращения маршевого винта, 9 - направление сил от горизонтальных рулей, необходимых для компенсации реактивного момента от вращающихся маршевого винта, 10 - возможные направления действия сил от горизонтальных рулей, 11 - возможные направления действия моментов от горизонтальных рулей.
НПА управляется следующим образом. При движении с крейсерской скоростью винт с вертикальной осью вращения неподвижен и представляет собой х-образную систему горизонтальных управляемых рулей. При этом на горизонтальных рулях генерируются силы, компенсирующие реактивный момент от маршевого движителя и позволяющие управлять НПА. На режимах малого хода и отсутствия хода реактивный момент от вращающегося винта с вертикальной осью компенсируется маршевым винтом, управляемым в режиме циклического шага, а необходимые для управления по крену и тангажу силы генерируются винтом с вертикальной осью, управляемым изменением циклического шага его лопастей. Изменение глубины при таких скоростях движения осуществляется изменением общего шага винта с вертикальной осью вращения. В зависимости от класса задач такие НПА могут иметь различное водоизмещение, а также геометрические характеристики корпуса и движителей.
| название | год | авторы | номер документа |
|---|---|---|---|
| НЕОБИТАЕМЫЙ ПОДВОДНЫЙ АППАРАТ | 1997 |
|
RU2104210C1 |
| ВЫСОКОМАНЕВРЕННЫЙ АВТОНОМНЫЙ НЕОБИТАЕМЫЙ ПОДВОДНЫЙ АППАРАТ | 1997 |
|
RU2112694C1 |
| Беспилотный винтокрыл | 2023 |
|
RU2831846C1 |
| НЕОБИТАЕМЫЙ ПОДВОДНЫЙ АППАРАТ | 1997 |
|
RU2115586C1 |
| ПОДВОДНОЕ СУДНО ДЛЯ ОБСЛУЖИВАНИЯ ПОДВОДНЫХ ДОБЫЧНЫХ КОМПЛЕКСОВ НА АРКТИЧЕСКОМ ШЕЛЬФЕ И ДРУГИХ ПОДВОДНО-ТЕХНИЧЕСКИХ РАБОТ | 2016 |
|
RU2629625C1 |
| СПОСОБ СПАСЕНИЯ ЛЮДЕЙ ИЗ ОТСЕКОВ ОПРОКИНУВШЕГОСЯ КОРАБЛЯ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2001 |
|
RU2275311C2 |
| ПОДВОДНЫЙ АППАРАТ В.С.ГРИГОРЧУКА | 1998 |
|
RU2131376C1 |
| АВТОНОМНЫЙ НЕОБИТАЕМЫЙ ПОДВОДНЫЙ АППАРАТ | 2020 |
|
RU2746094C1 |
| СПОСОБ И УСТРОЙСТВО ОСВЕЩЕНИЯ ПОДВОДНОЙ ОБСТАНОВКИ | 2017 |
|
RU2655592C1 |
| ЛЕТАТЕЛЬНЫЙ АППАРАТ С ВЕРТИКАЛЬНЫМ ВЗЛЕТОМ И ПОСАДКОЙ И/ИЛИ С ВЕРТИКАЛЬНЫМ ВЗЛЕТОМ И ПОСАДКОЙ С УКОРОЧЕННЫМ ПРОБЕГОМ | 2021 |
|
RU2764311C1 |
Изобретение относится к подводному судостроению. Необитаемый подводный аппарат (НПА) предназначен для патрулирования локальных подводных районов и первичного обследования обнаруженных объектов. НПА содержит два движителя, один из которых представляет из себя маршевый винт с возможностью изменения общего и циклического шага, ось которого расположена вдоль строительной горизонтали НПА. Второй движитель действует только при снижении скорости движения до очень малых скоростей или при полной остановке НПА и представляет собой винт с возможностью изменения общего и циклического шага, ось вращения которого расположена перпендикулярно строительной горизонтали НПА. При движении с крейсерской скоростью этот винт неподвижен и представляет собой х-образную систему горизонтальных управляемых рулей. Достигается высокая маневренность аппарата на малых скоростях движения, снижается уровень шума. 3 ил.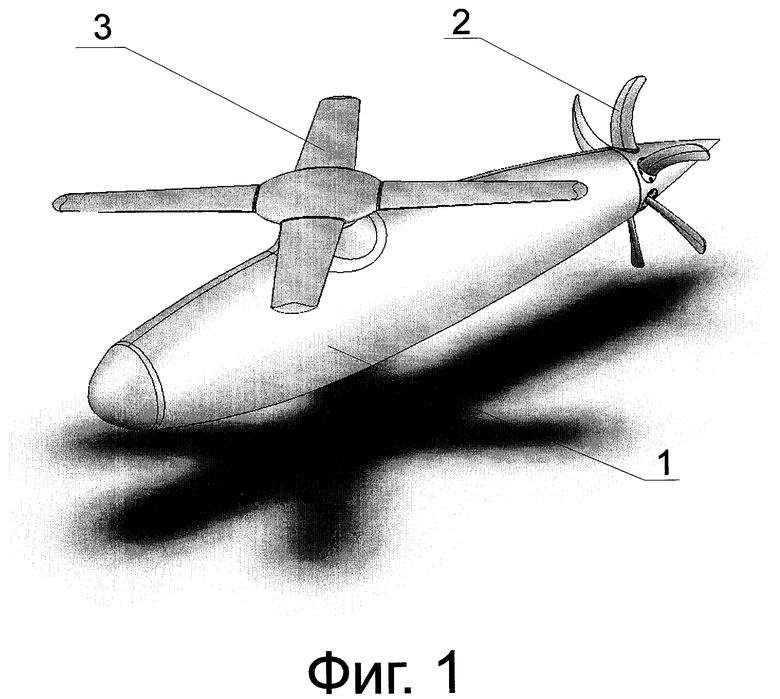
Необитаемый подводный аппарат с двумя движителями в виде винтов с возможностью управления циклическим и общим шагом, один из которых представляет из себя маршевый винт, ось которого расположена вдоль строительной горизонтали необитаемого подводного аппарата, второй движитель действует только при снижении скорости движения до очень малого или отсутствия хода необитаемого подводного аппарата и представляет собой винт, ось вращения которого расположена перпендикулярно строительной горизонтали необитаемого подводного аппарата, при движении с крейсерской скоростью этот винт неподвижен и представляет собой х-образную систему горизонтальных управляемых рулей.
| ВЫСОКОМАНЕВРЕННЫЙ АВТОНОМНЫЙ НЕОБИТАЕМЫЙ ПОДВОДНЫЙ АППАРАТ | 1997 |
|
RU2112694C1 |
| ПОДВОДНЫЙ АППАРАТ В.С.ГРИГОРЧУКА | 1998 |
|
RU2131376C1 |
| US 4577583 А, 25.03.1986 | |||
| Ю.А.Боженов и др | |||
| Самоходные необитаемые подводные аппараты | |||
| - Ленинград: СУДОСТРОЕНИЕ, 1986, с.10, 12. | |||

