Изобретение относится к области гироскопической техники.
Известно, что в бескарданных инерциальных навигационных системах (БИНС) корпус бесконтактного гироскопа установлен непосредственно на объекте и может принимать любое угловое положение в диапазоне 0-360o, которое измеряется системой съема угловой информации (ССУИ).
Известны БИНС, в ССУИ которых используется оптический метод съема информации [1].
Сферический ротор такой БИНС имеет на поверхности контрастный (в смысле светового отражения)рисунок, а ССУИ содержит три пары фотодатчиков, расположенных по осям координатной системы xyz, и электронную схему для обработки сигналов датчиков. В данной БИНС используется ССУИ с время-импульсной модуляцией светового потока.
Однако реализация таких ССУИ затруднена сложностью устранения погрешностей, вызванных нестабильностью скорости вращения ротора.
Наиболее близким к предлагаемому является электростатический гироскоп (ЭСГ) [2] , в котором в ССУИ применена фазо-импульсная модуляция светового потока, позволяющая исключить влияние нестабильности вращения ротора на точность системы списывания углового положения оси ротора. Для этого на поверхность ротора нанесен рисунок, состоящий из непересекающихся поглощающих линий, являющихся дугами большого круга. Линии имеют одинаковую толщину по всей длине и нанесены от 50o северной параллели до 50o южной параллели. Дуги каждой линии пересекаются с экватором под углом 60o, имеют одинаковую ширину и расстояние между соседними линиями одинаково по всей поверхности ротора.
ССУИ с фазо-импульсной модуляцией содержит три идентичных пары оптических датчиков, образующих прямоугольную систему координат. Каждый датчик состоит из последовательно соединенных фотоумножителя и осциллятора, два выхода каждой пары оптических датчиков соединены с двумя входами соответствующего измерителя сдвига фаз (ИСФ), выход которого подключен для обработки информации к ЭВМ. При вращении ротора оптические датчики выдают серию импульсов определенной частоты и фазы. Разность фаз между импульсами каждой пары оптических датчиков является функцией широтного угла и не зависит от скорости вращения ротора. Для увеличения точности работы гироскопа за один оборот ротора количество нанесенных на него оптических линий должно быть как можно больше.
Недостаток известного устройства заключается в том, что при числе оптических линий больше двух появляется неоднозначность информации,т.к. при последовательном наклоне ротора от 0 до 50o разность фаз пары датчиков неоднократно повторяет свои значения и не ясно, в каком углу работает гироскоп. Это может привести к потере правильности снятого угла при включениях питания, кратковременном его пропадании или при единичных сбоях компьютера.
Для исключения неоднозначности необходимо усложнять ССУИ, используя дополнительные грубые каналы отсчета. При этом параллельно с оптическим считыванием информации работает система, считывающая информацию, вызываемую дебалансом ротора. Данные системы по сложности аналогичны оптической ССУИ,что снижает в целом надежность ЭСГ.
Кроме того, сознательное внесение дебаланса в ротор ухудшает его свойства как гироскопа и падает точность работы. Также возникают проблемы, связанные со стыковкой точных и грубых отсчетов, созданных датчиками разной физической природы. При этом имеет место несовпадение их информации при снятии амплитудной характеристики, что вносит опять неоднозначность отсчетов при некоторых углах оси ротора.
Техническим результатом изобретения является повышение точности и надежности работы электростатического гироскопа с оптоэлектрической системой съема угловой информации.
Это достигается устранением неопределенности в ССУИ путем выработки сигналов опорного (грубого) отсчета оптоэлектронными средствами. Для этого в ЭСГ с оптическим считыванием положения оси ротора, содержащий ротор с нанесенным на него рисунком из 16 полос, наклоненных к экватору, блок подвеса гироскопа, блок раскрутки гироскопа, три пары оптических датчиков, расположенных в корпусе гироскопа по осям прямоугольной системы координат, выходы которых подключены к входам соответствующих трех измерителей сдвига фаз (ИСФ), форма полос на рисунке ротора выполнена так, что ширина 14-ти полос рисунка равна ширине промежутка между полосами и только один из промежутков сужен па сравнению с остальными за счет увеличения ширины прилегающих к нему полос, кроме того, в первом ИСФ вход первого блока фазовой автоподстройки (ФАПЧ) подключен к одному оптическому датчику и к входам первого ждущего мультивибратора и первой схемы И, и выход подключен к опорному входу первого преобразователя фаза-код (ПФК), и через счетчик - к входу первого ПФК, к счетному входу первого счетчика с начальной установкой и к входу обратной связи первого ФАПЧ, вход второго ФАПЧ подключен к другому оптическому датчику и к входам второго ждущего мультивибратора и второй схемы И, а выход соединен с другим входом первого ПФК, с опорным входом второго ПФК и со счетным входом второго счетчика с начальной установкой, входы начальной установки обоих счетчиков соединены с выходами соответствующих схем И,а выходы подключены к входам второго ПФК, выход первого счетчика с начальной установкой соединен с Д-входом триггера и со счетным входом триггера в третьем ИСФ, счетный вход триггера подключен к выходу первого счетчика с начальной установкой второго ИСФ, у которого счетный вход триггера подключен к выходу первого счетчика с начальной установкою третьего ИСФ.
На фиг.1 приведена структурная схема предлагаемого устройства ЭСГ с оптическим считыванием положения оси ротора;на фиг.2 - проекция на плоскость нанесенного на роторе рисунка.
Устройство состоит из ротора 1 с нанесенным на него конкретным рисунком 2, блока 3 подвеса гироскопа, блока 4 раскрутки ротора, трех пар оптических датчиков 5-6,7-8, и 9-10 и трех измерителей 11,12 и 13 сдвига фаз. Каждый из измерителей 11,12 и 13 состоит из аналогичных узлов, показанных на фиг.1 для измерителя 11, а именно блоков фазовой автоподстройки (ФАПЧ) 14 и 15 ; ждущих мультивибраторов 16 и 17 логических схем И 18 и 19, счетчика 20, счетчиков с начальной установкой 21 и 22, преобразователей фаза-код (ПФК)23 и 24, триггера 25.
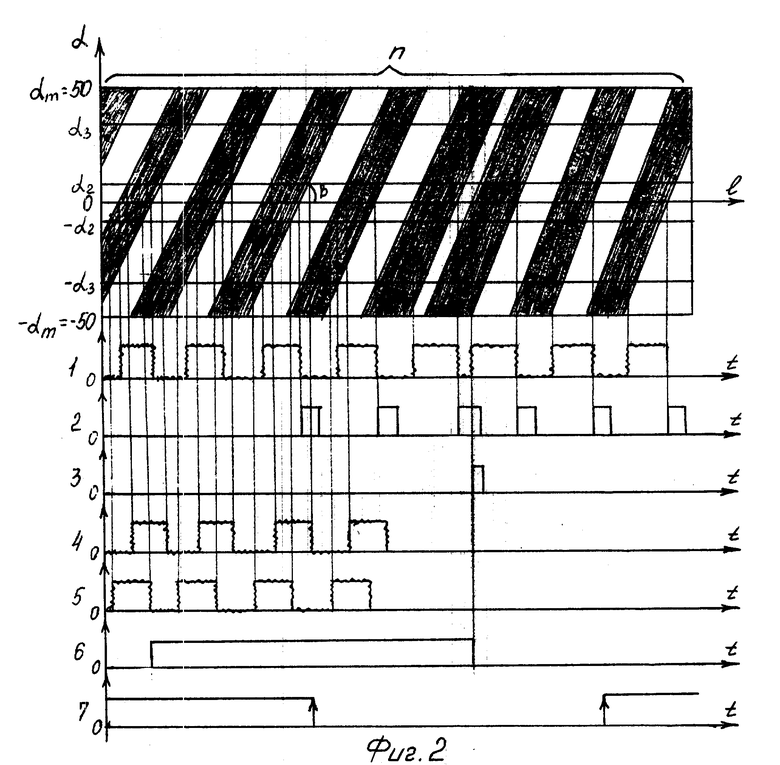
На роторе 1 нанесен рисунок 2, состоящий из п = 16 полос, которые наклонены к экватору, лежащему в плоскости ХОУ, под углом β (фиг.2). Рисунок 2 расположен на поверхности ротора 1 только в диапазоне dm= ±50o от экватора. Расстояние между полосами вдоль экватора равно ширине полосы, только один из 16-ти промежутков между полосами сужен в два раза по сравнению с остальными за счет увеличения ширины прилегающих к нему полос. Шесть оптических датчиков 5,6,7,8,9,10 расположены на корпусе гироскопа 1 по два датчика на каждую из ортогональных осей ХОУ 2. Датчики преобразуют изображение рисунка 2 ротора 1, которое находится против каждого датчика, в электрический сигнал. При вращении ротора 1 этот сигнал представляет периодическую последовательность импульсов с частотой 16 Fр где Fр - частота вращения ротора 1.
Блок 3 обеспечивает бесконтактный подвес ротора 1 внутри корпуса гироскопа, а блок 4 обеспечивает первоначальную раскрутку ротора, после чего ротор 1 крутится по инерции с частотой Fр 500 Гц. Раскрутку 2 производят таким образом, чтобы ось вращения ротора 1 совпадала с осью Z корпуса гироскопа. При этом сигналы датчиков 5,6 и 7,8,расположенных в плоскости ХОУ, совпадают между собой по фазе (фиг.2,1), т.к. датчики 5-6 и 7-8 считывают изображение вдоль экватора по линии O-O.
На фиг. 2 показана проекция рисунка 2 ротора 1 на плоскость, в которой длина экватора равна длине окружности на поверхности ротора 1 на широте α 50o. Полосы рисунка 2 при этом имеют вид параллелограммов. Оптические датчики 5-6 и 7-8 просматривают изображение рисунка вдоль линий, параллельных линии экватора O-O.
При изменении положения корпуса ротора 1 относительно начального положения ось 1 ротора 1 не совпадает с осью 2 подвеса. Датчики 5-6, расположенные вдоль одной оси Х, просматривают изображение рисунка 2 вдоль линий α2 и (-α2). При этом сигналы датчиков 5,6 x1x2 не совпадают между собой по фазе (кривые 2,4 и 2,5). Эти сигналы x1x2 поступают на входы измерителя сдвига фаз 11. Внутри измерителя 11 сигналы x1 и x2 поступают на входы схем ФАПЧ 14 и 15, которые преобразуют аналоговые сигналы датчиков 5,6 в импульсные цифровые сигналы, совпадающие по фазе с исходными. Причем, т.к. схемы 14 и 15 ФАПЧ являются эффективными фильтрами нижних частот, то они значительно повышают соотношение сигнал - шум. Это выражается в том, что случайная нестабильность фронтов цифрового сигнала по отношению к периоду повторения значительно меньше, чем соотношение случайной амплитуды шума и амплитуды основной гармоники в исходном сигнале.
На выходе ФАПЧ 15 частота сигнала равна 16 Fр 8 кГц, на выходе счетчика 20 частота сигнала также равна 8 кГц. Последний сигнал является фактически выходом схемы ФАПЧ, счетчик 20 введен для того, чтобы иметь в измерителе 11 высокочастотный сигнал, кратный частоте вращения ротора 1. Счетчик 20 содержит к разрядов, поэтому частота на входе счетчика 20 равна 16•Fр•2к разрядов, поэтому на входе счетчика при к = 10, это составит
214•Fр = 8 мГц.
ПФК 23 производит измерение разности фаз полученных цифровых сигналов. Полученное цифровое значение пропорционально величине угла α2, максимально оно составляет величину 2к=1024. Причем результат появляется с частотой 16 Fр. За один оборот ротора 1 можно затем усреднить 16 результатов измерения, при этом повысится точность измерения за счет усреднения шумов и погрешности нанесения рисунка 2 отдельных полос, но снизится быстрота измерения. Опорным сигналом для ПФК 23, с помощью которого измеряют разницу фаз, является высокочастотный входной сигнал счетчика 20, кратный частоте вращения ротора 1. Поэтому результат измерения не зависит от частоты вращения ротора 1, при увеличении или уменьшении частоты вращения ротора 1 постоянный угол α2 даст на выходе ПФК 23 один и тот же результат.
Чувствительность измерителя 11 выражается через
где ϕ - разница фаз сигналов на входе ПФК 23.
Поэтому для повышения чувствительности необходимо увеличить число полос "п" и уменьшить угол наклона полос β . Однако при этом диапазон изменения разницы фаз составит
при β =69o имеем: Δϕ = ± 615o.
Это означает, что информация однозначна при Δϕ ≤± 180o. При этом ширина зоны однозначной информации составит
При увеличении угла α от α3 до αm возможно троекратное повторение информации. Всего число зон повторяемой информации составит
Поэтому необходимо определять нахождение угла α в одной из указанных зон с помощью грубого отсчета. Для этого входные сигналы x1 и x2 поступают на входы ждущих мультивибраторов 16,17, которые запускаются задними фронтами импульсов x1 и x2 и генерируют собственные импульсы с длительностью более половины паузы, но меньше длительности паузы между импульсами (см. кривую 2.2). Затем входной сигнал x1 и выходной импульс мультивибратора 16 поступают на схему И 18, на выходе которой всегда наблюдается логический ноль, т. к. один из выходов всегда нулевой, кроме случая, когда против оптического датчика 5 находится узкий промежуток между полосами. В этот момент на входах схемы И 18 две логические единицы (см. кривые 2.1 и 2.2), тогда на выходе схемы И 18 возникает один раз за оборот ротора короткий импульс (см. 2.3).
Сигнал схемы И 18 сбрасывает счетчик 21 в ноль, на счетный вход которого поступают импульсы с частотой следования полос 16 Fp. Счетчик 21 четырехразрядный, поэтому он, отсчитав 16-ть импульсов, переходит в ноль и одновременно, подтверждая это состояние, сбрасывается в ноль новым импульсом схемы 18. Старший разряд счетчика 21 образует выходной сигнал в виде меандра(скважность 2) с частотой Fр, причем его фаза привязана к появлению между против оптического датчика 5 узкого промежутка между полосами.
Аналогично появляется сигнал на выходе схема И 19 в момент появления узкого промежутка между полосами против датчика 6. Однако этот импульс устанавливает счетчик 22 в положение 8. Счетчик 8 при этом подсчитывает прохождение полос от 8 до 15, сбрасывается в ноль, считает далее от 0 до 8 и устанавливается сигналом схемы 19 в положение 8 и так далее. Фаза сигнала старшего разряда счетчика 22 привязана к моменту появления сигнала на выходе схемы 19. Т.к. датчики 5 и 6 расположены по разные стороны ротора, то сдвиг фаз импульсов схем 18 и 19 составляет 180o, поэтому выходные сигналы счетчиков 21 и 22 совпадают по фазам, если оптические датчики 5,6 двигаются вдоль экватора О-О. При наклоне оси ротора относительно датчиков 5,6 в выходных сигналах счетчиков 21 и 22 появляется разность фаз, которая измеряется ПФК 24. Однако чувствительность грубого измерения низка и составит .
.
Диапазон изменения разницы фаз составит
при β 69o имеем Δϕпр= ±38,5o. Результат грубого измерения однозначен. Опорным сигналом для ПФК 24 является сигнал ФАПЧ 15 с частотой 16 Fр, при этом выходной ПФК 24 является 4-разрядным.
Эти разряды являются грубым отсчетом 0хг, они также являются старшими разрядами по отношению к разрядам точного отсчета 0хг. При возрастании угла α более 50o сигналы у датчиков 5 и 6 пропадают, однако, при этом возникают сигналы датчиков 9, 10 оси Z. Поэтому в системе измерения всегда есть две оси с работающими датчиками. Есть моменты времени, когда работают датчики трех осей при: 50o > α > 40o, При α 130o датчики 5 и 6 вновь работают, но их информацию нельзя отличить от информации в углах 50o > α >-50o. Для исключения этой неоднозначности введен триггер 25, на Д-вход которого подан сигнал в виде меандра счетчика 21 канала X, а на С -вход -аналогичный сигнал канала У. У этих сигналов всегда имеется сдвиг фаз 90o (см. кривые 2.6 и 2,7),только при 50o > α > -50o сдвиг фаз положительный, а при 230o> α > 130o сдвиг фаз отрицательный. Передний фронт сигнала канала У записывает в триггер 25 значение в этот момент сигнала канала X, поэтому в первом случае (при малых α) на выходе триггера 25 θxy у имеем логический ноль, а во втором случае - единицу.
Таким образом, цифровые сигналы θxт,θxг и θxу описывают значения угла α в диапазоне от 0 до 360o.
При отсутствии сигналов с оптических датчиков любой из осей x,y,z имеется в наличие только один из выходных сигналов θxy,θyz,θzx , которого хватает для исключения неоднозначности. При наличии сигналов датчиков во всех осей x, y,z выходные сигналы θxy,θyz,θzx имеют место, дублируя друг друга. Цифровые сигналы получены от датчика одной физической природы (оптического) с применением общих электрических цепей, поэтому они идеально совмещены друг с другом. Имеется при этом возможность увеличить число полос на рисунке ротора, что увеличивает чувствительность измерения угла от ротора. Все это повышает точность ЭСГ, а отсутствие параллельной иной физической природы системы измерения грубого отсчета существенно повышает надежность гироскопа.
Кроме того, электрическая схема устройства позволяет выполнять ее в виде полузаказных микросхем. При этом вся электрическая схема может разместиться в нескольких корпусах, что резко повысит надежность, снизит вес и габариты устройства. В таком виде гироскоп может найти широкое применение в морском транспорте, авиации и космонавтике.
Источники информации:
1. US, патент 3355953, кл. 74.5, 1967.
2. US, патент 3313161, кл. 74.5.6, 1967.4
| название | год | авторы | номер документа |
|---|---|---|---|
| ЭЛЕКТРОСТАТИЧЕСКИЙ ГИРОСКОП С ОПТИЧЕСКИМ СЧИТЫВАНИЕМ ПОЛОЖЕНИЯ ОСИ РОТОРА И СПОСОБ ОПРЕДЕЛЕНИЯ УГЛОВОГО ПОЛОЖЕНИЯ ОСИ РОТОРА | 2013 |
|
RU2531060C1 |
| ЭЛЕКТРОСТАТИЧЕСКИЙ ГИРОСКОП | 1999 |
|
RU2173446C2 |
| СПОСОБ ИЗГОТОВЛЕНИЯ ПОЛОГО РОТОРА ЭЛЕКТРОСТАТИЧЕСКОГО ГИРОСКОПА | 1994 |
|
RU2116622C1 |
| СПОСОБ ИЗГОТОВЛЕНИЯ РОТОРА ЭЛЕКТРОСТАТИЧЕСКОГО ГИРОСКОПА | 2001 |
|
RU2193161C1 |
| МИКРОМЕХАНИЧЕСКИЙ ГИРОСКОП | 2004 |
|
RU2279634C2 |
| СПОСОБ ИЗГОТОВЛЕНИЯ ЧУВСТВИТЕЛЬНОГО ЭЛЕМЕНТА ЭЛЕКТРОСТАТИЧЕСКОГО ГИРОСКОПА | 1999 |
|
RU2153649C1 |
| СПОСОБ ИЗГОТОВЛЕНИЯ РЕЛЬЕФНЫХ РИСУНКОВ НА СФЕРИЧЕСКИХ ПОВЕРХНОСТЯХ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1997 |
|
RU2140623C1 |
| УПРАВЛЯЕМАЯ ПАРАШЮТНАЯ СИСТЕМА | 1996 |
|
RU2111898C1 |
| ЧУВСТВИТЕЛЬНЫЙ ЭЛЕМЕНТ ГИРОСКОПА С ЭЛЕКТРИЧЕСКИМ ПОДВЕСОМ РОТОРА | 1994 |
|
RU2116624C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ НОМИНАЛЬНОЙ ЧАСТОТЫ ВРАЩЕНИЯ РОТОРА ЭЛЕКТРОСТАТИЧЕСКОГО ГИРОСКОПА | 2004 |
|
RU2269745C1 |
Использование: в области гироскопической техники. Сущность изобретения: повышение точности и надежности работы электростатического гироскопа (ЭСГ) с оптоэлектронной системой съема угловой информации достигается устранением неопределенности в системе съема угловой информации путем выработки сигналов опорного (грубого) отсчета оптоэлектронными средствами. Для этого расстояния между контрастными линиями на роторе гироскопа делаются разной ширины, а каждый измеритель сдвига фаз состоит из двух блоков фазовой автоподстройки, двух ждущих мульвибраторов, двух логических схем И, счетчика, двух счетчиков с начальной установкой, двух преобразователей фаза-код и триггера. 2 ил.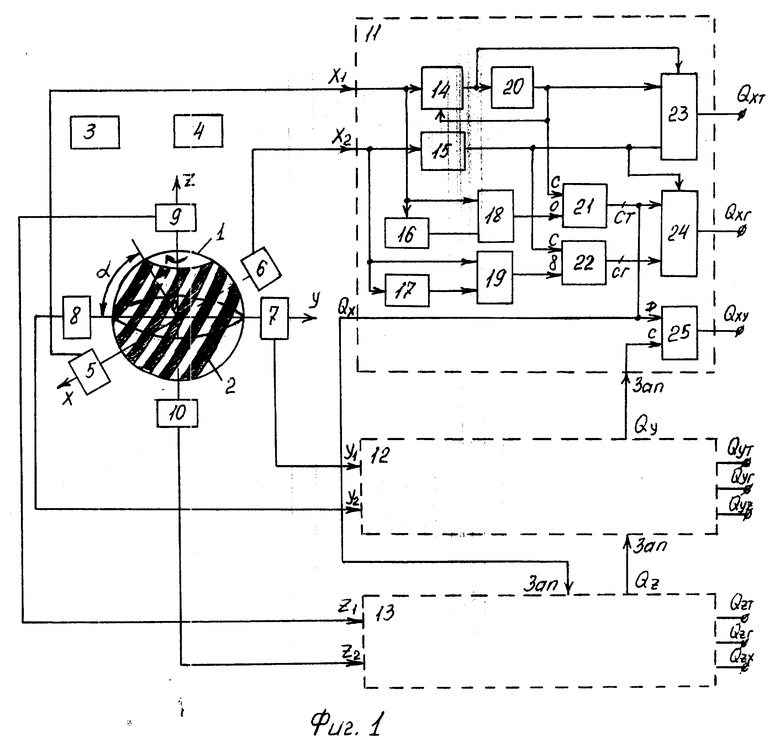
Электростатический гироскоп с оптическим считыванием положения оси ротора, содержащий ротор, блок подвеса гироскопа, блок раскрутки гироскопа, три пары оптических датчиков, расположенных в корпусе гироскопа по осям прямоугольной системы координат, выходы которых подключены к входам соответствующих трех измерителей сдвига фаз, отличающийся тем, что на роторе нанесен рисунок из 16 полос, наклоненных к экватору, ширина 14 полос равна ширине промежутка между полосами и только один из промежутков сужен по сравнению с остальными за счет увеличения ширины прилегающих к нему полос, кроме того, каждый измеритель сдвига фаз состоит из двух блоков фазовой автоподстройки, двух ждущих мультивибраторов, двух логических схем И, счетчика, двух счетчиков с начальной установкой, двух преобразователей фаза - код и триггера, причем в первом измерителе сдвига фаз вход первого блока фазовой автоподстройки подключен к одному оптическому датчику и входам первого ждущего мультивибратора и первой схемы И, а выход подключен к опорному входу первого преобразователя фаза код и через счетчик к входу первого преобразователя фаза код, счетному входу первого счетчика с начальной установкой и входу обратной связи первого блока фазовой автоподстройки, вход второго блока фазовой автоподстройки подключен к другому оптическому датчику и входам второго ждущего мультивибратора и второй схемы И, а выход соединен с другим входом первого преобразователя фаза код, опорным входом второго преобразователя фаза код и со счетным входом второго счетчика с начальной установкой, входы начальной установки обоих счетчиков соединены с выходами соответствующих схем И, а выходы подключены к входам второго преобразователя фаза код, выход первого счетчика с начальной установкой соединен с D-входом триггера и счетным входом триггера в третьем измерителе сдвига фаз, счетный вход триггера подключен к выходу первого счетчика с начальной установкой второго измерителя сдвига фаз, у которого счетный вход триггера подключен к выходу первого счетчика с начальной установкой третьего измерителя сдвига фаз.
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| US, патент, 3355953, кл | |||
| Приспособление в центрифугах для регулирования количества жидкости или газа, оставляемых в обрабатываемом в формах материале, в особенности при пробеливании рафинада | 0 |
|
SU74A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| US, патент, 3313161, кл | |||
| Приспособление в центрифугах для регулирования количества жидкости или газа, оставляемых в обрабатываемом в формах материале, в особенности при пробеливании рафинада | 0 |
|
SU74A1 |

