Изобретение относится к промысловой геофизике и может быть использовано в нефтяной, газовой и горной промышленности при определении угловых параметров пространственной ориентации траектории скважины и скважинных объектов.
Известен способ определения зенитного и визирного углов, включающий измерение сигналов с датчиков угла поворота, установленных на осях вращения одностепенных маятников, которые расположены в корпусе скважинного прибора так, что оси вращения маятников и продольная ось корпуса прибора образуют прямоугольную систему координат; при этом визирный угол определяют как арктангенс отношения тангенсов углов поворота первого и второго маятника, а зенитный угол определяют как арктангенс корня квадратного из суммы квадратов тангенсов углов поворота двух маятников [1].
Кроме того, известен способ определения зенитного и визирного углов, реализованный в устройстве [2], в котором измеряют сигналы с датчиков углов поворота, установленных на осях вращения одностепенных маятников, расположенных в корпусе преобразователя так, что оси вращения маятников ортогональны друг другу и перпендикулярны продольной оси корпуса, а зенитный угол θ и визирный угол ϕ определяют следующим образом:
где
β1 и β2 - измеряемые углы поворота соответственно первого и второго маятников [2].
Недостатки аналогов следующие. Определение зенитного θ и визирного ϕ углов по выражениям (1) осуществляется с низкой точностью, поскольку в них не учитываются параметры инструментальных погрешностей преобразователя, возникающие в техпроцессе изготовления деталей и узлов, а также при окончательной сборке и настройке устройства.
Наиболее близким по технической сущности и достигаемому результату является способ определения зенитного и визирного углов, реализованный в устройстве [3] , включающий установку в корпусе преобразователя двух одностепенных маятников с датчиками углов поворота так, что оси их вращения и продольная ось корпуса образуют в идеальном случае прямоугольную систему координат, измерение сигналов с датчиков углов поворота β1 и β2, функционально связанных с зенитным θ и визирным ϕ углами
и определение искомых углов θ и ϕ следующим образом
Недостатки прототипа. Определение зенитного θ и визирного ϕ углов осуществляется с низкой точностью, поскольку в выражениях (3) углы β1 и β2 имеют идеальную функциональную связь (2) с искомыми углами θ и ϕ, соответствующую ортогональной ориентации осей вращения маятников друг другу и продольной оси корпуса преобразователя и не учитывающую угловые параметры инструментальных погрешностей, а именно - углы отклонения осей вращения маятников от осей ортонормированного базиса, связанного с корпусом преобразователя, одна из осей которого совпадает с продольной осью корпуса преобразователя.
Задачей, на решение которой направлено заявляемое изобретение, является повышение точности измерения зенитного и визирного углов за счет учета априорно измеренных угловых параметров, обусловливающих инструментальные погрешности преобразователя.
Поставленная задача достигается тем, что в способе определения зенитного и визирного углов, реализованном в устройстве [3], включающем установку в корпусе преобразователя двух одностепенных маятников с датчиками углов поворота так, что оси их вращения и продольная ось корпуса образуют в идеальном случае прямоугольную систему координат, измерение сигналов с датчиков углов поворота первого маятника β1 и второго маятника β2, априорно измеряют параметр σ - угол отклонения оси вращения первого маятника от оси OX базиса корпуса в плоскости OXY, параметр ρ - угол отклонения оси вращения первого маятника от оси OX базиса корпуса в плоскости OXZ и параметр γ - угол отклонения оси вращения второго маятника от оси OY базиса корпуса в плоскости OYZ, а зенитный θ и визирный ϕ определяют следующим образом:
Пример конкретного выполнения способа. На фиг. 1 представлена реализация предложенного способа в двухмаятниковом преобразователе зенитного и визирного углов, содержащем корпус преобразователя 1, два одностепенных маятника 2 и 3 с датчиками углов поворота (ДУП) 4 и 5, установленных в осях вращения маятников, управляемый коммутатор (УК) 6, аналого-цифровой преобразователь (АЦП) 7, блок передачи данных (БПД) 8, блок управления (БУ) 9 и ЭВМ 10.
Работа преобразователя заключается в следующем. При отклонении корпуса 1 от вертикали на зенитный угол θ и его повороте вокруг собственной оси относительно плоскости наклона на визирный угол ϕ маятники 2 и 3 под действием их устанавливающих моментов поворачиваются соответственно на углы β1 и β2. При этом сигналы с ДУП4 и ДУП5, пропорциональные углам β1 и β2, через управляемый коммутатор УК6 последовательно поступают на вход АЦП7. После аналого-цифрового преобразователя в АЦП7 коды Q1 и Q2, пропорциональные соответственно измеренным β1 и β2 через блок передачи данных БПД8 подаются в ЭВМ10. БУ9 отрабатывает управляющие команды на УК6, АЦП7 и БПД9, обеспечивающие последовательный опрос сигналов с ДУП4 и ДУП5, их аналого-цифровое преобразование в АЦП7 и передачу кодов Q1 и Q2 через БПД8 И ЭВМ10.
В идеальном случае оси вращения маятников 2 и 3 совпадают с осями OX и OY базиса корпуса 1 OXYZ. При этом углы поворота β1 и β1 маятников 2 и 3 связаны с определяемыми зенитным θ и визирным ϕ углами следующими соотношениями:
Однако при конструировании, изготовлении деталей и сборке преобразователя реальная пространственная ориентация осей вращения маятников 2 и 3 характеризуется отклонением от осей OX и OY следующими параметрами:
1) σ - угол отклонения оси вращения первого маятника 2 от оси OX базиса корпуса 1 в плоскости OXY;
2) ρ - угол отклонения оси вращения первого маятника 2 от оси OX базиса корпуса 1 в плоскости OXZ;
3) γ - угол отклонения оси вращения второго маятника 3 от оси OY базиса корпуса 1 в плоскости OYZ.
Наличие угловых параметров σ, ρ и γ приводит к появлению инструментальных погрешностей измерения, поскольку углы поворота β1 и β2 маятников 2 и 3 будут связаны с определяемыми зенитным θ и визирным ϕ углами следующим образом:
или при малых углах σ, ρ и γ
Поэтому для повышения точности определения зенитного θ и визирного ϕ углов априорно измеряют численные значения угловых параметров σ ,ρ и γ и в качестве констант, характерных для конкретного конструктивного исполнения преобразователя, вводят в ЭВМ10, которая осуществляет определение искомых углов θ и ϕ по измеренным β1 и β2 с учетом параметров σ, ρ и γ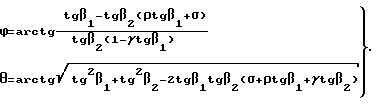
Угловые параметры σ, ρ и γ определяют следующим образом. Осуществляют наклон корпуса 1 на зенитный угол θ, равный 45o, и вращают вокруг продольной оси до достижения нулевого сигнала с ДУП5, т.е. β2 = 0. При таком пространственном положении корпуса 1 будут выполнены условия tgθ = tg45o = 1 и ϕ1 = 90o(cosϕ1 = 0, sinϕ1 =1), что соответствует измеренным значениям β11 и β21
Затем осуществляют поворот в отрицательном направлении вокруг своей оси на 90o. При этом значение визирного угла будет равно нулю, т.е. ϕ2 = 0(cosϕ2 = 1,sinϕ2 = 0), и измеренные в данной точке значения углов поворота маятников определятся следующим образом:
откуда угловые параметры последовательно определяют по измеренным значениям β12, β11 и β22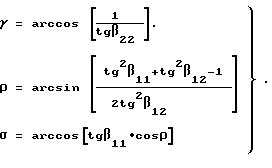
Итак, заявляемое изобретение позволяет повысить точность определения зенитного θ и визирного ϕ углов путем априорного экспериментального определения угловых параметров σ, ρ и γ, обуславливающих инструментальные погрешности, и их дальнейшего учета в качестве констант при обработке результатов измерений углов поворота маятников β1 и β2.
Источники информации
1. Миловзоров Г. В. Электромеханические преобразователи наклона в системах управления подвижными объектами // Электромеханические и электромагнитные элементы систем управления: Межвуз. научн. сборник N 1 - Уфа, 1983, с. 43 - 47.
2. Авторское свидетельство СССР N 933968, кл. E 21 B 47/022, 1981.
3. Авторское свидетельство СССР N 1298363, кл. E 21 B 47/02, 1987 (прототип).
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ОПРЕДЕЛЕНИЯ ЗЕНИТНЫХ И ВИЗИРНЫХ УГЛОВ | 1997 |
|
RU2121574C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ЗЕНИТНОГО И ВИЗИРНОГО УГЛОВ | 1997 |
|
RU2121575C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ АЗИМУТА, ЗЕНИТНОГО УГЛА И УГЛА МАГНИТНОГО НАКЛОНЕНИЯ | 1997 |
|
RU2131029C1 |
| СПОСОБ КАЛИБРОВКИ ИНКЛИНОМЕТРИЧЕСКИХ СИСТЕМ | 2015 |
|
RU2611567C1 |
| ИНКЛИНОМЕТР | 1995 |
|
RU2111454C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ КОМПЛЕКСА УГЛОВЫХ ПАРАМЕТРОВ ПРОСТРАНСТВЕННОЙ ОРИЕНТАЦИИ БУРОВОГО ИНСТРУМЕНТА | 2015 |
|
RU2610957C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ УГЛОВ НАПРАВЛЕНИЯ СКВАЖИНЫ | 2001 |
|
RU2198291C1 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ УГЛОВ ИСКРИВЛЕНИЯ СКВАЖИНЫ И ПОЛОЖЕНИЯ ОТКЛОНИТЕЛЯ ПРИ БУРЕНИИ | 2001 |
|
RU2184845C1 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ УГЛОВ ИСКРИВЛЕНИЯ СКВАЖИНЫ | 2000 |
|
RU2166084C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ЗЕНИТНОГО И ВИЗИРНОГО УГЛОВ СКВАЖИНЫ | 1991 |
|
RU2017950C1 |
Способ определения зенитного и визирного углов используется в промысловой геофизике в нефтяной, газовой и горной промышленности при определении угловых параметров пространственной ориентации траектории скважины и скважинных объектов. Измеряют сигналы датчиков углов поворота двух одностепенных маятников преобразователя. Продольная ось вращения корпуса преобразователя и оси вращения датчиков образуют прямоугольную систему координат. Априорно измеряют параметр σ - угол отклонения оси вращения первого маятника от оси OХ базиса корпуса преобразователя в плоскости ОХY, параметр ρ - угол отклонения оси вращения первого маятника от оси ОХ базиса корпуса в плоскости ОХZ и параметр γ -угол отклонения второго маятника от оси OY базиса корпуса в плоскости ОYZ , а зенитный θ и визитный ϕ углы определяют по измеренным значениям углов поворота первого маятника β1 и второго маятника β2 и измеренным значениям σ, ρ и γ из математического выражения. Способ позволяет повысить точность определения зенитного и визирного углов путем учета угловых параметров, характеризующих инструментальные погрешности. 1 ил.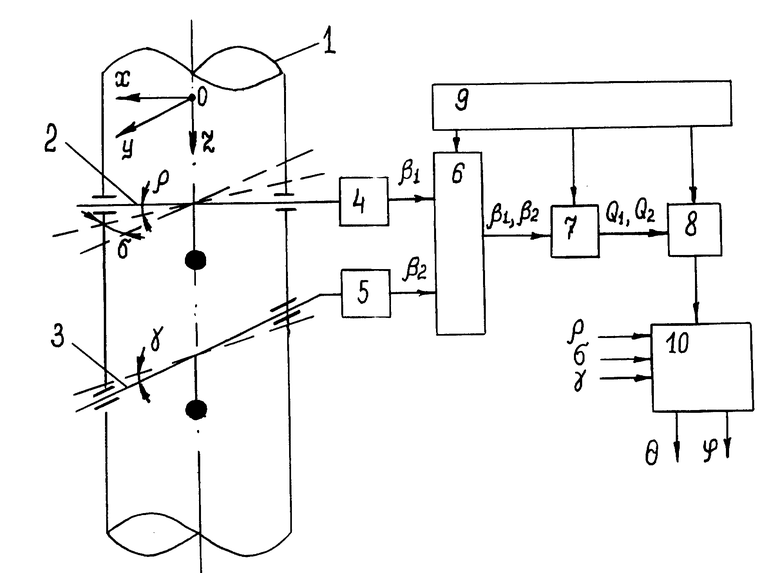
Способ определения зенитного и визирного углов, включающий установку в корпусе преобразователя двух одностепенных маятников с датчиками углов поворота так, что оси их вращения и продольная ось корпуса преобразователя в идеальном случае образуют прямоугольную систему координат, измерение сигналов с датчиков углов поворота и определение зенитного и визирного углов по измеренным сигналам, отличающийся тем, что априорно измеряют параметр σ - угол отклонения оси вращения первого маятника от оси OX базиса корпуса в плоскости OXY, параметр ρ - угол отклонения оси вращения первого маятника от оси OX базиса корпуса в плоскости OXZ и параметр γ - угол отклонения оси вращения второго маятника от оси OY базиса корпуса в плоскости OYZ, а зенитный θ и визирный ϕ углы определяют по измеренным значениям углов поворота первого маятника β1 второго маятника β2 и значениям параметров σ1, ρ, γ следующим образом: м
м
| Преобразователь зенитного и визирного углов | 1985 |
|
SU1298363A1 |
| Преобразователь наклона скважины и угла установки отклонителя бурового инструмента | 1986 |
|
SU1328497A2 |
| Способ определения азимута искривления траектории скважины | 1988 |
|
SU1555470A1 |
| Способ определения пространственного положения скважинного снаряда | 1989 |
|
SU1701901A1 |
| RU 2004786 C1, 15.12.93 | |||
| СПОСОБ ОПРЕДЕЛЕНИЯ АЗИМУТА СКВАЖИНЫ В ПОСЛЕДОВАТЕЛЬНЫХ ТОЧКАХ И ГИРОСКОПИЧЕСКИЙ ИНКЛИНОМЕТР | 1991 |
|
RU2030574C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ОРИЕНТАЦИИ ОБЪЕКТА В ТОЧКЕ ОСТАНОВА | 1993 |
|
RU2062872C1 |
| US 4163324 A, 08.07.79 | |||
| US 4682421 A, 28.07.87 | |||
| US 4709486 A, 12.01.87 | |||
| US 4999920 A, 05.12.91 | |||
| САМОЛЕТ С ПЛОСКИМ ХВОСТОВЫМ ОПЕРЕНИЕМ | 2002 |
|
RU2220072C1 |
| УСТРОЙСТВО ДЛЯ КРЕПЛЕНИЯ ВИБРАТОРА НА ШПАЛАХ | 0 |
|
SU315743A1 |
