Изобретение относится к области автоматики, а именно к измерительной технике и автоматическому регулированию, и может быть использовано для определения коэффициентов передаточных функций динамических объектов сложных структур, например, при проектировании и настройке систем регулирования летательным аппаратом газотурбинным двигателем и т.д.
Известны способы идентификации линейных динамических объектов, основанные на формировании спектральной плотности входного сигнала исследуемого объекта и взаимной спектральной плотности входного и выходного сигналов исследуемого объекта [1].
Основным недостатком известных спектральных методов идентификации является некорректность их применения для идентификации динамических объектов в тех случаях, когда наблюдаемые сигналы наряду со случайными составляющими содержат неслучайные гармонические составляющие, чем обычно характеризуются сигналы, зафиксированные в режиме нормальной эксплуатации. В этом случае сигналы спектральных плотностей характеризуются наличием узких пиков и нулевых провалов, и получение статистических оценок спектральных плотностей по оценкам сигнала корреляционной функции на конечном интервале наблюдений путем непосредственного применения преобразования Фурье не дает желаемых результатов, так как в этом случае дисперсии оценок сигналов спектральных плотностей имеют тот же порядок, что и сами спектральные плотности, что приводит к большим погрешностям [1] . Кроме того, указанные способы весьма критичны к помехам, присутствующим одновременно во входном и выходном сигналах.
Известен также способ [2] определения коэффициентов передаточных функций динамических объектов путем подачи на вход объекта время-степенных пробных сигналов в виде последовательности одиночных импульсов. По этому способу можно определить коэффициенты передаточных функций более высокого порядка.
Однако реализация этого способа требует значительных временных затрат, что связано с экспериментальным определением всех коэффициентов αk время-степенных пробных сигналов αвх = αktk и с необходимостью последовательной настройки модели объекта. Кроме того, на точность определения параметров передаточных функций влияет настройка модели.
Наиболее близким к предлагаемому изобретению является способ определения параметров передаточных функций линейных динамических объектов путем подачи тестового сигнала, стремящегося к установившемуся значению, на вход линейного динамического объекта и интегрирования его выходного сигнала, измерения интервалов времени t1 и t2 от момента подачи тестового сигнала величины A до момента достижения уровней J1 и J2 соответственно и определения постоянной времени
и коэффициента передачи линейного динамического объекта
Этот способ непригоден для определения параметров передаточных функций объектов второго и более высоких порядков.
Задачей, на решение которой направлено заявляемое изобретение, является повышение точности и быстродействия при определении коэффициентов числителя передаточных функций.
Поставленная задача решается тем, что в способе определения параметров передаточных функций линейных динамических объектов путем подачи на вход объекта исследования единичного ступенчатого сигнала и измерения интервала времени от момента подачи тестового сигнала величины A до момента достижения порогового значения, в отличие от прототипа в момент завершения переходного процесса сигнала на выходе объекта y(t) по признаку |yуст-y(t)| ≤ Δд (где yуст - установившееся значение выходного сигнала; Δд - допустимая погрешность завершения свободных колебаний), измеряют длительность переходного процесса T и, учитывая, что изображение выходного сигнала y(t) можно записать в виде
где
m - порядок числителя, формируют специальную функцию Zi(t), представляющую собой интеграл от разности [y(t)-yо(t)]
при этом функция yо(t) выражается через Yуст и свободные колебания объекта
где функция, определяющая свободные колебания объекта, которую определяют на втором интервале времени t=T, когда формируют свободное движение объекта
функция, определяющая свободные колебания объекта, которую определяют на втором интервале времени t=T, когда формируют свободное движение объекта  , для чего с входа объекта при завершении переходного процесса снимают единичный ступенчатый сигнал. Изображение функции Z1(t) можно записать в виде
, для чего с входа объекта при завершении переходного процесса снимают единичный ступенчатый сигнал. Изображение функции Z1(t) можно записать в виде . (4)
. (4)
Из выражения (4) следует, что операция интегрирования понижает на единицу порядки числителей изображений yi(p) и yl(p). Следовательно, установившееся значение функции Z1(t) будет определяться составляющей
Из (5) следует, что коэффициент
а для вычисления bi i=2 oC m вычисляют интеграл Zi(t), в подинтегральном выражении которого вместо y(t) подставляют Z(i-1)(t), а вместо
и определяют bi по формуле
При bi= 0 процесс вычислений завершается. При этом теоретически не существует ограничения на порядок числителя исследуемых объектов и не требуется предварительного значения структуры объекта. Кроме того, время эксперимента равно 2T, что позволяет сэкономить время определения коэффициентов для объектов с высоким порядком числителя.
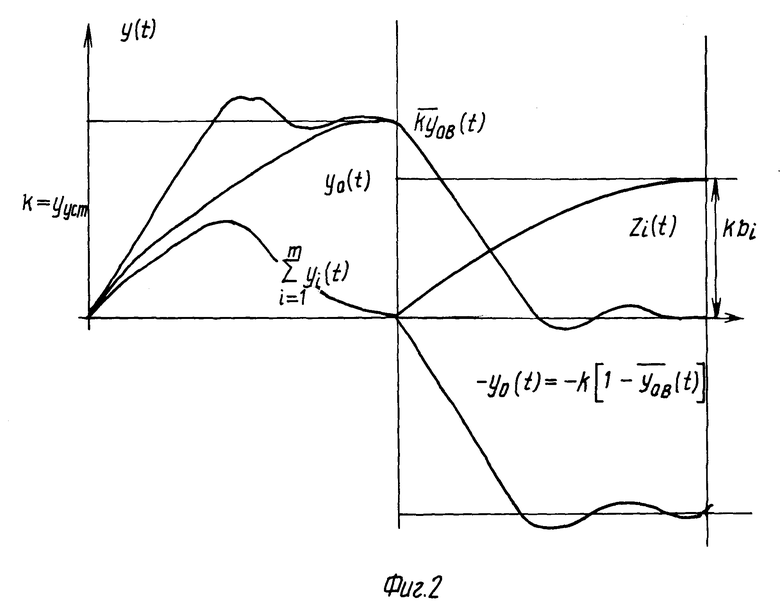
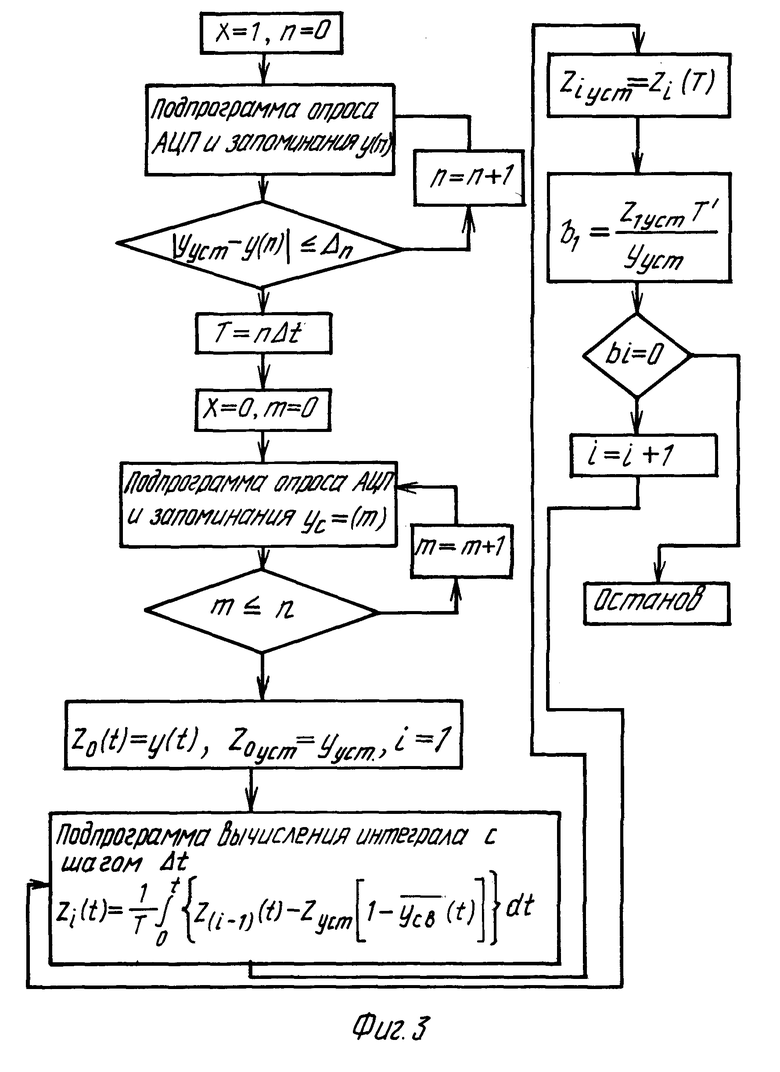
На фиг. 1 приведена структурная схема устройства, реализующего предлагаемый способ; на фиг. 2 - иллюстрация процессов определения коэффициентов полинома числителя; на фиг. 3 - блок-схема программы вычислений коэффициентов полинома числителя, реализуемых ЭВМ.
Устройство содержит формирователь входного сигнала 1, исследуемый объект 2, аналого-цифровой преобразователь 3, ЭВМ 4.
Как видно на фиг. 2 и фиг. 3, при определении коэффициентов bi на первом временном интервале определяется время завершения переходного процесса T и через равные промежутки времени Δt, зависящее от частоты квантования, в память ЭВМ заносятся значения отклика объекта y(t) на воздействие единичного ступенчатого сигнала. На втором интервале времени формируется свободное движение объекта  для чего с входа объекта снимается единичный ступенчатый сигнал. Функция yсв(t) так же, как y(t) заносится в память ЭВМ с той же частотой квантования. Далее осуществляется операция интегрирования, вычисляется интеграл Zi(t) и определяется коэффициент b1
для чего с входа объекта снимается единичный ступенчатый сигнал. Функция yсв(t) так же, как y(t) заносится в память ЭВМ с той же частотой квантования. Далее осуществляется операция интегрирования, вычисляется интеграл Zi(t) и определяется коэффициент b1
Затем вычисляют коэффициент bi i=2 oC m, для чего определяют интеграл Z1(t), в подинтегральном выражении которого вместо y(t) подставляют Z(i-1)(t), а вместо
Рассмотрим реализацию данного способа на примере объекта с передаточной функцией вида
где
τ - постоянная времени;
ξ - коэффициент демпфирования.
Определим b0, b1, b2. Отклик объекта на входное воздействие в виде ступенчатого сигнала X(t)=A • l(t) запишется в следующем виде:
Здесь α = ξ/τ - коэффициент, характеризующий скорость затухания переходного процесса; w0- частота колебаний объекта. Сигнал y(t) имеет 3 составляющие
y(t)=y2(t)+y1(t)+y0(t),
где
Сигналы y2(t), y1(t), y0(t) соответственно отражают составляющие b2p2/A(p), b1p/A(p) и b0/A(p) передаточной функции объекта. Момент завершения переходного процесса T с определенной погрешностью определяется по условию
|yуст-y(t)| ≤ Δд.
Очевидно, что y1(T)=0, y2(T)=0 и y0(T)=Ab0. Тогда y(T)=Ab0. Находим: b0= y(T)/A. Для определения b1 вычисляем интеграл
Сигнал Z1(t) формируется путем интегрирования разности [y(t)-yуст+yсв.(t)] c помощью ЭВМ. Свободное движение было возбуждено в динамическом объекте при начальном условии yсв.(0)=yуст=b0.
По результатам интегрирования имеем: Z1(T)=Ab1/T. Находим: b1=Z1(T)/A. Для определения b2 вычисляем интеграл
где
Тогда
Сигнал Z2(t) формировался путем интегрирования разности [Z1(t)-Z1(T)+Zlcв.(t)] с помощью ЭВМ. Свободное движение было возбуждено в объекте при начальном условии Z1св.(0)= b1/T. По результатам интегрирования имеем Z2(T)=Ab2/T2. Находим b2=Z2(T)T2/A. Найдем b3
где
Тогда
Из этого получаем, что b3=0. Отсюда следует, что порядок числителя m=2.
Таким образом, предлагаемый способ позволяет автоматически определять порядок числителя и вычислять его коэффициенты с большей точностью и быстродействием.
Источники информации
1. Пугачев В.С. Теория случайных функций и ее применение к задачам автоматического управления, М. 1957, с. 395-403, 592-587.
2. Авторское свидетельство СССР N 696416 МКл. G 05 B 23/00, 1979.
3. Авторское свидетельство СССР N 661511 МКл. G 05 B 23/00, 1979 (прототип).
Изобретение относится к области автоматики, а именно к измерительной технике и автоматическому регулированию, и может быть использовано при определении коэффициентов числителя передаточных функций динамических объектов сложных структур, например, при проектировании и настройке систем регулирования летательным аппаратом, газотурбинным двигателем и т.д. Техническим результатом является повышение точности и быстродействия при определении коэффициентов числителя передаточной функции. Технический результат достигается за счет того, что в момент завершения переходного процесса сигнала на выходе объекта y( t) по признаку |yуст-y(t)| ≤ Δд измеряют длительность переходного процесса Т и формируют специальную функцию Zi(t). На втором интервале времени t = T формируют свободное движение объекта  для чего с входа объекта при завершении переходного процесса снимают единичный ступенчатый сигнал и определяют коэффициент
для чего с входа объекта при завершении переходного процесса снимают единичный ступенчатый сигнал и определяют коэффициент
а для вычисления bi(i = 2 oC m) вычисляют интеграл Zi(t) и определяют bi по формуле . 3 ил.
. 3 ил.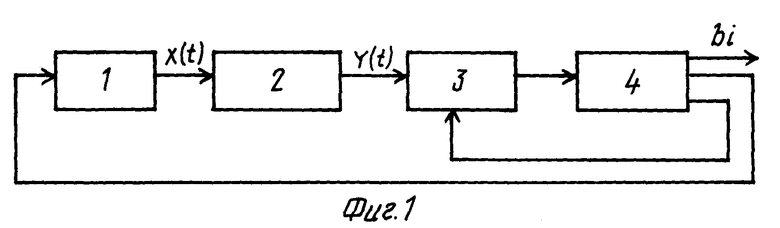
Способ определения коэффициентов передаточных функций линейных динамических объектов путем подачи на вход объекта исследования единичного ступенчатого сигнала и измерения интервала времени от момента подачи тестового сигнала величины A до момента достижения порогового значения, отличающийся тем, что в момент завершения переходного процесса сигнала на выходе объекта y(t) по признаку  (где yуст - установившееся значение выходного сигнала, Δд - допустимая погрешность завершения свободных колебаний) измеряют длительность переходного процесса T и, учитывая, что изображение выходного сигнала y(t) можно записать в виде
(где yуст - установившееся значение выходного сигнала, Δд - допустимая погрешность завершения свободных колебаний) измеряют длительность переходного процесса T и, учитывая, что изображение выходного сигнала y(t) можно записать в виде
где
m - порядок числителя, формируют специальную функцию Zi(t), представляющую собой интеграл от разности [Y(t)-Yo(t)]
при этом функция yo(t) выражается через yуст и свободные колебания объекта
где  функция, определяющая свободные колебания объекта, которую определяют на втором интервале времени t =T, когда формируют свободное движение объекта
функция, определяющая свободные колебания объекта, которую определяют на втором интервале времени t =T, когда формируют свободное движение объекта  для чего со входа объекта при завершении переходного процесса снимают единичный ступенчатый сигнал и определяют коэффициент
для чего со входа объекта при завершении переходного процесса снимают единичный ступенчатый сигнал и определяют коэффициент
где Z1уст = Z1 (T), а для вычисления bi(i = 2oCm) вычисляют интервал Zi(t), в подинтегральном выражении которого вместо y(t) представляют Zi-1(t), а вместо
и определяют bi по формуле л
л
| Способ определения параметров передаточных функций линейных динамических объектов | 1977 |
|
SU661511A1 |
| Способ определения коэффициентов передаточных функций систем регулирования | 1975 |
|
SU696416A1 |
| Способ определения параметров передаточной функции линейного динамического звена и устройство для его осуществления | 1986 |
|
SU1377826A1 |
| Пугачев В.С | |||
| Теория случайных функций и ее применение к задачам автоматического управления | |||
| - М.: Физматиз, 1957, с.395-403, 592-597. | |||
