Изобретение относится к области измерения параметров движения и может быть использовано для автономного определения полного вектора линейной скорости самолетов, ракет, космических аппаратов и других подвижных объектов, движущихся в магнитном поле Земли, или другого небесного тела.
Известен способ определения скорости подвижных объектов, основанный на непрерывном измерении и интегрировании компонент ускорения [1].
Этот способ обладает погрешностью, связанной с накоплением ошибки измерения ускорения.
Известен способ определения скорости подвижных объектов, основанный на эффекте Доплера. При реализации способа с подвижного объекта по направлению к земле посылают радиосигнал и принимают сигнал, рассеиваемый землей в обратном направлении, который смешивается с излучаемым сигналом. Из результирующего разностного сигнала доплеровского сдвига выделяют доплеровский спектр. Этот спектр подают на устройство слежения за частотой, выделяющее средние частоты доплеровского спектра, по которым затем определяют составляющие скорости полета [2].
К недостаткам данного способа относится подверженность влиянию радиопомех, имеющих частоту, равную частоте отраженного сигнала. При движении объекта над водой возникает погрешность, обусловленная морскими течениями и движением поверхности воды под действием ветра.
Кроме того, при таком способе объект является источником радиоизлучения.
Известен способ определения скорости подвижных объектов, в частности летательного аппарата. Способ заключается в измерении полного воздушного давления на выходе приемников, полного давления в основном и резервном пневмотрактах и статического давления окружающей среды и определении скорости летательного аппарата по значениям этих давлений в информационном канале [3].
При данном способе присутствует погрешность, обусловленная движением воздушных масс (ветром). Этот способ непригоден для измерения скорости подвижного объекта, находящегося за пределами атмосферы.
Известен способ определения скорости подвижных объектов, включающий определение составляющей вектора индукции магнитного поля Земли в месте движения объекта, измерение разности потенциалов между концами расположенного на объекте изолированного линейного проводника, а также вычисление составляющей вектора скорости объекта относительно магнитного поля. Согласно данному способу на подвижном объекте располагают линейный изолированный измерительный проводник длиной l в горизонтальном направлении, перпендикулярном движению объекта [4]. При наличии составляющей вектора индукции магнитного поля Земли (м.п.З.) и составляющей вектора скорости объекта относительно м.п.З., перпендикулярных к проводнику, на электроны в проводнике действует сила  , где e - заряд электрона. Под действием этой силы электроны в проводнике смещаются относительно положительных ионов к одному из концов проводника, вследствие чего внутри проводника возникает электрическое поле величиной -
, где e - заряд электрона. Под действием этой силы электроны в проводнике смещаются относительно положительных ионов к одному из концов проводника, вследствие чего внутри проводника возникает электрическое поле величиной - , а на концах проводника появляется разность потенциалов
, а на концах проводника появляется разность потенциалов
где l - вектор, направление которого совпадает с направлением проводника, а модуль равен длине проводника. В данном способе м.п.З. в месте движения объекта считается приближенно известным, например, на основе выполненных заранее измерений или расчетов. По данным о м.п.З. и величине разности потенциалов, измеренной в проводнике, на основании (1) оценивают горизонтальную составляющую скорости полета. Например, пусть в прямоугольной системе координат Oxyz вертикальная составляющая вектора  равна Bz, измерительный проводник ориентирован вдоль оси Oy и имеет длину ly, а измеренная на его концах разность потенциалов равна Uy, тогда согласно (1) горизонтальная скорость полета vx = -Uy/Bzly.
равна Bz, измерительный проводник ориентирован вдоль оси Oy и имеет длину ly, а измеренная на его концах разность потенциалов равна Uy, тогда согласно (1) горизонтальная скорость полета vx = -Uy/Bzly.
Недостатком данного способа является то, что он не обеспечивает высокую точность измерений и не позволяет определить полный вектор  скорости объекта. Наличие горизонтальной составляющей вектора
скорости объекта. Наличие горизонтальной составляющей вектора  в направлении движения объекта и вертикальной составляющей вектора
в направлении движения объекта и вертикальной составляющей вектора  приводит к появлению в измерительном проводнике дополнительной неконтролируемой разности потенциалов, что приводит к ошибке определения горизонтальной составляющей вектора
приводит к появлению в измерительном проводнике дополнительной неконтролируемой разности потенциалов, что приводит к ошибке определения горизонтальной составляющей вектора  , а составляющая вектора
, а составляющая вектора  , направленная вдоль вектора
, направленная вдоль вектора  , согласно (1) вообще не вызывает появления разности потенциалов в измерительном проводнике. Кроме того, в связи с тем, что не проводятся измерения величины магнитного поля в месте нахождения объекта, появляется дополнительная погрешность, обусловленная неточностью определения величины локального магнитного поля. В случае объектов, движущихся в пределах атмосферы, атмосферные электрические поля вызывают появление в измерительном проводнике разности потенциалов, не связанной с движением объекта, что создает помеху измерениям.
, согласно (1) вообще не вызывает появления разности потенциалов в измерительном проводнике. Кроме того, в связи с тем, что не проводятся измерения величины магнитного поля в месте нахождения объекта, появляется дополнительная погрешность, обусловленная неточностью определения величины локального магнитного поля. В случае объектов, движущихся в пределах атмосферы, атмосферные электрические поля вызывают появление в измерительном проводнике разности потенциалов, не связанной с движением объекта, что создает помеху измерениям.
Технический результат изобретения - повышение точности определения вектора скорости подвижных объектов.
Указанный результат достигается тем, что в способе определения скорости подвижных объектов, включающем определение составляющей вектора индукции магнитного поля Земли в месте движения объекта, измерение разности потенциалов между концами расположенного на объекте изолированного линейного измерительного проводника, вычисление составляющей вектора скорости объекта относительно магнитного поля, на объекте проводят измерения трех составляющих вектора индукции магнитного поля Земли в прямоугольной системе координат Oxyz, связанной с подвижным объектом, а измерения разностей потенциалов проводят между концами трех измерительных проводников, при этом каждый из них направлен вдоль одной из осей Ox, Oy, Oz, после чего вычисляют компоненты вектора скорости объекта в связанной системе координат согласно выражениям
где vx, vy, vz - компоненты вектора скорости объекта в связанной системе координат;
Bx, By, Bz - компоненты вектора индукции магнитного поля Земли в связанной системе координат;
lx, ly, lz - длины измерительных проводников, ориентированных соответственно вдоль осей Ox, Oy, Oz, связанной системы координат;
Ux, Uy, Uz - разности потенциалов между концами измерительных проводников, ориентированных соответственно вдоль осей Оx, Оy, Оz связанной системы координат,
затем определяют величины углов рыскания, крена и тангажа осей связанной системы координат относительно инерциальной системы координат Oo Xo Yo Zo и по полученным значениям углов и величинам vx, vy, vz вычисляют компоненты vxo, vyo, vzo вектора скорости объекта в инерциальной системе координат.
При этом измерения разности потенциалов целесообразнее проводить между концами трех измерительных проводников, помещенных внутрь замкнутой электропроводной оболочки, проницаемой для магнитного поля. В качестве материала для замкнутой электропроводной оболочки (электростатического экрана), проницаемого для магнитного поля, может быть взят либо чистый металл, магнитная проницаемость которого с высокой степенью точности близка к 1, например алюминий (μ = 1,000023), олово (μ = 1,0000022), медь (μ = 0,9999897), либо сплав в определенной пропорции диамагнитного (μ < 1) и парамагнитного (μ > 1) металлов.
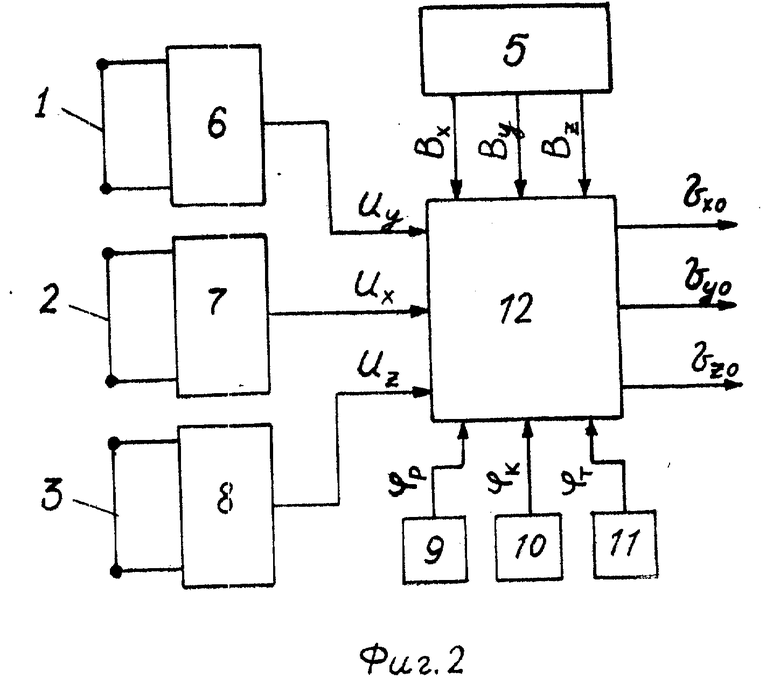
На фиг. 1 показана схема расположения и ориентировка измерительных проводников и осей чувствительности компонент магнитометра; на фиг. 2 - блок-схема измерительного комплекса для определения компонент вектора скорости объекта.
На фиг. 1 и 2: 1, 2, 3 - измерительные проводники; 4 - замкнутая электропроводная оболочка; 5 - трехкомпонентный магнитометр; 6, 7, 8 - измерители разности потенциалов; 9 - датчик угла рыскания; 10 - датчик угла крена; 11 - датчик угла тангажа; 12- бортовой вычислитель; lx, ly, lz - длины измерительных проводников; Kx, Ky, Kz - оси чувствительности компонент магнитометра; Bx, By, Bz - измеренные значения компонент вектора индукции магнитного поля на выходах магнитометра; ϕp, ϕк, ϕт - измеренные значения углов на выходах соответственно датчиков углов рыскания, крена и тангажа; Ux, Uy, Uz - измеренные значения разности потенциалов на выходах измерителей разности потенциалов.
Способ основан на эффекте возникновения разности потенциалов в проводнике, движущемся параллельно самому себе и перпендикулярно магнитному полю. При таком движении проводника на находящиеся в нем электроны действует сила  . Под действием этой силы электроны смещаются относительно положительных ионов кристаллической решетки, за счет чего в проводнике возникает электрическое поле и кулоновские силы начинают препятствовать разделению зарядов. Разделение зарядов в проводнике прекращается, когда наступает равенство сил
. Под действием этой силы электроны смещаются относительно положительных ионов кристаллической решетки, за счет чего в проводнике возникает электрическое поле и кулоновские силы начинают препятствовать разделению зарядов. Разделение зарядов в проводнике прекращается, когда наступает равенство сил
где  - вектор возникающего в проводнике электрического поля.
- вектор возникающего в проводнике электрического поля.
Разложим силы в левой и правой части равенства (2) на составляющие вдоль осей прямоугольной системы координат Oxyz, связанной с подвижным объектом. Тогда для прямолинейного проводника 1 длиной ly, направленного вдоль оси Oy (фиг.1), можно записать
vxBzl + vzBxl = -Eyl (3).
Поскольку при этом разность потенциалов Uy между концами проводника Uy = -Eyly, то из (3) получаем уравнение
Uy = vxBzly + vzBxly (4).
Аналогично для прямолинейных проводников 2 и 3, направленных вдоль осей Ox и Oz и имеющих длину соответственно lx и lz, получаем еще два уравнения
Ux = vyBzlx + vzBylx (5)
Uz = vxBylz + vyBxlz (6)
Решая систему из трех уравнений (4), (5), (6), получаем выражения для компонент вектора скорости объекта в связанной системе координат Oxyz
Выражения (7), (8), (9) получены для покоящейся системы отсчета.
Если выбрать систему отсчета внутри замкнутой электропроводной оболочки 4, движущейся вместе с объектом, то в этой системе отсчета при движении объекта относительно магнитного поля будет наблюдаться электрическое поле, величина которого для объектов, движущихся со скоростью много меньше скорости света с точностью до пренебрежимо малых релятивистских поправок будет равно  . Выражения (7), (8), (9) будут определены и в системе отсчета, расположенной внутри электропроводной оболочки 4.
. Выражения (7), (8), (9) будут определены и в системе отсчета, расположенной внутри электропроводной оболочки 4.
Способ осуществляется следующим образом.
С помощью трехкомпонентного магнитометра 5 ведут непрерывно измерения составляющих Bx, By, Bz вектора индукции м.п.З. в связанной с подвижным объектом прямоугольной системе координат Oxyz. При этом в качестве трехкомпонентного магнитометра могут быть использованы, например, три высокочувствительных компонентных датчика магнитного поля.
Разности потенциалов Ux, Uy, Uz, возникающие в измерительных проводниках 1, 2, 3 при движении объекта относительно м.п.З., измеряют при помощи специальных измерителей потенциалов 6, 7, 8. Одновременно с помощью расположенных на подвижном объекте датчиков углов рыскания 9, крена 10 и тангажа 11 ведут измерения угла рыскания ϕp, угла крена ϕк и угла тангажа ϕт. Указанные углы отсчитываются относительно предварительно заданной инерциальной системы координат Oo Xo Yo Zo.
Сигналы с выходов компонент магнитометра, характеризующие составляющие Bx, By, Bz локального вектора  индукции м.п.З., сигналы с выходов измерителей разности потенциалов 6, 7, 8, характеризующие разности потенциалов между концами измерительных проводников 1, 2, 3, сигналы с выходов датчиков 9, 10, 11, характеризующие величины углов рыскания ϕp, крена ϕк и тангажа ϕт, подают на входы бортового вычислителя 12, где вначале из выражений (7), (8), (9) вычисляют составляющие vx, vy, vz вектора скорости объекта в связанной системе координат Oxyz, а затем по измеренным величинам ϕp, ϕк, ϕт и определенным величинам vx, vy, vz вычисляют составляющие vxo, vyo, vzo вектора скорости объекта в инерциальной системе координат Oo Xo Yo Zo.
индукции м.п.З., сигналы с выходов измерителей разности потенциалов 6, 7, 8, характеризующие разности потенциалов между концами измерительных проводников 1, 2, 3, сигналы с выходов датчиков 9, 10, 11, характеризующие величины углов рыскания ϕp, крена ϕк и тангажа ϕт, подают на входы бортового вычислителя 12, где вначале из выражений (7), (8), (9) вычисляют составляющие vx, vy, vz вектора скорости объекта в связанной системе координат Oxyz, а затем по измеренным величинам ϕp, ϕк, ϕт и определенным величинам vx, vy, vz вычисляют составляющие vxo, vyo, vzo вектора скорости объекта в инерциальной системе координат Oo Xo Yo Zo.
Измерение трех составляющих вектора индукции магнитного поля Земли и измерение разностей потенциалов между концами трех измерительных проводников приводит к тому, что в системе уравнений (4, 5, 6) число неизвестных становится равным числу уравнений, что позволяет определить составляющие вектора скорости объекта vy и vz, перпендикулярные направлению полета, которые могут быть обусловлены, например, боковым ветром или восходящими потоками воздуха. Кроме того, это повышает точность определения скорости полета vx за счет использования более точного выражения (7).
Определение компонент вектора скорости объекта в инерциальной системе координат позволяет решать задачи инерциальной навигации.
Измерение разностей потенциалов между концами трех измерительных проводников 1 - 3, помещенных внутрь замкнутой электропроводной оболочки 4, проницаемой для магнитного поля, приводит к тому, что электрические поля от внешних по отношению к оболочке источников, например от грозовых облаков, не вызывают появления в измерительных проводниках разности потенциалов и поэтому не создают помеху измерениям. В то же время, благодаря тому что электропроводная оболочка 4 выполнена из материала, проницаемого для магнитного поля, например из материала с магнитной проницаемостью μ = 1, м.п.З. без ослабления и искажения проходит внутрь оболочки 4 и ее наличие не сказывается на величинах разностей потенциалов между концами измерительных проводников 1 - 3, возникающих при движении объекта.
По сравнению с известными использование предлагаемого способа позволит повысить достоверность и точность определения вектора скорости подвижных объектов в несколько раз, что в свою очередь ведет к повышению точности решения навигационных и баллистических задач.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ УГЛОВ ПРОСТРАНСТВЕННОЙ ОРИЕНТАЦИИ ПОДВИЖНОГО ОБЪЕКТА | 2014 |
|
RU2555496C1 |
| Способ коррекции бесплатформенной инерциальной навигационной системы | 2016 |
|
RU2635820C1 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ УГЛОВОГО ПОЛОЖЕНИЯ ПОДВИЖНОГО ОБЪЕКТА | 2005 |
|
RU2285931C1 |
| Бесплатформенная инерциальная курсовертикаль | 2016 |
|
RU2643201C2 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ УГЛОВОГО ПОЛОЖЕНИЯ ПОДВИЖНОГО ОБЪЕКТА (ВАРИАНТЫ) | 2004 |
|
RU2257546C1 |
| НАВИГАЦИОННЫЙ КОМПЛЕКС | 2005 |
|
RU2279039C1 |
| СПОСОБ И УСТРОЙСТВО КОНТРОЛЯ ИНЕРЦИАЛЬНОЙ НАВИГАЦИОННОЙ СИСТЕМЫ | 2012 |
|
RU2502050C1 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ УГЛОВОГО ПОЛОЖЕНИЯ ПОДВИЖНОГО ОБЪЕКТА | 2005 |
|
RU2278356C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ УГЛОВ ПРОСТРАНСТВЕННОЙ ОРИЕНТАЦИИ ЛЕТАТЕЛЬНОГО АППАРАТА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2015 |
|
RU2594631C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ МАГНИТНОЙ ДЕВИАЦИИ НА ПОДВИЖНОМ ОБЪЕКТЕ | 2022 |
|
RU2796372C1 |
Использование: в области измерения параметров движения для автономного определения полного вектора линейной скорости самолетов, ракет, космических аппаратов и других подвижных объектов, движущихся в магнитном поле Земли, или другого небесного тела. Сущность изобретения: способ включает определение составляющей вектора индукции магнитного поля Земли в месте движения объекта, измерение разности потенциалов между концами расположенного на объекте изолированного линейного измерительного проводника, вычисление составляющей вектора скорости объекта относительно магнитного поля. На объекте проводят измерение трех составляющих вектора индукции магнитного поля Земли в прямоугольной системе координат Оxyz, связанной с подвижным объектом, а измерения разностей потенциалов проводят между концами трех измерительных проводников, при этом каждый из проводников направлен вдоль одной из осей Ox, Oy, Oz, после чего вычисляют компоненты Vx, Vy, Vz вектора скорости объекта в связанной системе координат. Затем определяют величины углов рыскания, крена и тангажа осей связанной системы координат относительно инерциальной системы координат Oo Xo Yo Zo и по полученным значениям углов и величинам Vx, Vy, Vz вычисляют компоненты Vxo, Vyo, Vzo вектора скорости объекта в инерциальной системе координат. Измерения разностей потенциалов лучше проводить между концами трех измерительных проводников, помещенных внутрь замкнутой электропроводной оболочки, проницаемой для магнитного поля. 1 з.п. ф-лы, 2 ил.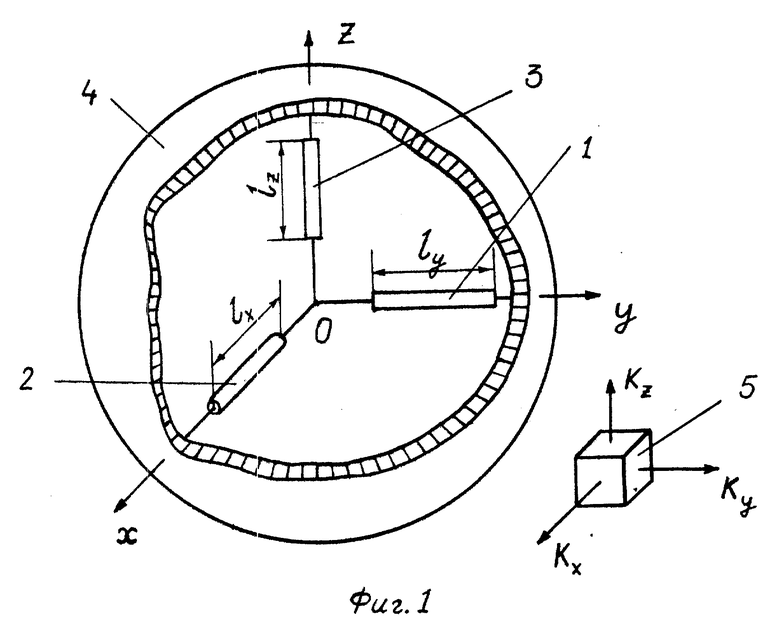
где vx, vy, vz компоненты вектора скорости объекта в связанной системе координат;
Вх, Ву, Вz компоненты вектора индукции магнитного поля Земли в связанной системе координат;
lx, Ly, Lz длины измерительных проводников, ориентированных соответственно вдоль осей Ох, Оу, Оz связанной системы координат;
Ux, Uy, Uz разности потенциалов между концами измерительных проводников, ориентированных соответственно вдоль осей Ох, Оу, Оz связанной системы координат,
затем определяют величины углов рыскания, крена и тангажа осей связанной системы координат относительно инерциальной системы координат Оо Хо Yо Zо и по полученным значениям углов и величинам vx, vy, vz вычисляют компоненты vx o, vy o, vz o вектора скорости объекта в инерциальной системе координат.
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Феодосьев В.И | |||
| Основы техники ракетного полета | |||
| - М.: Наука, 1981, с.378-391 | |||
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Самолетные навигационные системы | |||
| /Перевод с английского под ред | |||
| В.Ю | |||
| Полякова | |||
| - М.: Воениздат, 1973, с.183-243 | |||
| Переносная печь для варки пищи и отопления в окопах, походных помещениях и т.п. | 1921 |
|
SU3A1 |
| RU, патент, 2014617, кл | |||
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Очаг для массовой варки пищи, выпечки хлеба и кипячения воды | 1921 |
|
SU4A1 |
| Фейнман Р | |||
| и др | |||
| Фейнмановские лекции по физике | |||
| Электродинамика | |||
| - М.: Мир, 1977, т.6, с.279 и 280. | |||
