Изобретение относится к способам агроэкологически безопасной обработки почвы, управления, машинам и технологиям ее использования.
Известны способы обработки почвы и машина для их осуществления, включающие воздействие ведущих рабочих органов и управление направлением движения и нагрузкой (пат. 2226326 и 2232490, М. кл.7 A01B 79/08, 9/00).
Цель изобретения - повышение безопасности и точности вождения на склонах - уравновешивание и сближение боковых сил энергосредства и рабочих органов - преобразование толкающих сил в силы управления.
Это достигается воздействием боковыми силами реверсивных и ведущих рабочих органов на стенки борозда, соблюдением слитности проходов рабочих органов и повышением безопасности работы на склонах. Почву обрабатывают в период, обеспечивающий высокую контрастность (различие) свойств до и после обработки. Удобрения и биомассу запахивают холодоспелой почвой и задерживают проростание сорняков. Траекторию движения формируют копированием двух линий, преобразуют толкающую силу в управляющую и содействуют слитности проходов на склонах.
Машина содержит направляющие колеса для копирования двух линий, ведущие и тормозные реверсивные рабочие органы содействия вождению.
Машина содержит реверсивный рабочий орган с отвалом самоповорота вокруг оси около лемеха и реверсивные самоподающиеся вперед рабочие органы и регуляторы их подачи.
Траекторию движения формируют копированием линии контрастности свойств почвы до и после обработки и двух борозд колесами и рабочими органами без полевых досок. Снег и/или удобрения запахивают при высокой влажности в период морозоспелости и задерживают проростание сорняков. При обработке земли вибрации рабочих органов повышают пропорционально плотности земли. По мере снижения плотности земли вибрации снижают до нуля.
Машина для обработки земли содержит колесо или колеса - заменители полевых досок рабочих органов - копиры борозд.
Машина имеет направляющие колеса и копир линии контрастности свойств земли до и после обработки ее для вождения по линии слитности проходов.
Машина содержит шагающие рабочие органы - движители продольного хода для снижения уплотняющего действия ходовой части на почву.
Рабочие органы воздействуют на колеса, выполняют технологические, динамические (силовые), управляющие (кибернетические) и защитные функции. Это облегчает использование в любой зоне и повышает целеполагающий результат и экономическую эффективность. Преобразование сопротивления рабочих органов и массы в параметр управления, машины для обработки земли в агроробота повышает эффективность использования биоклиматического потенциала земли.
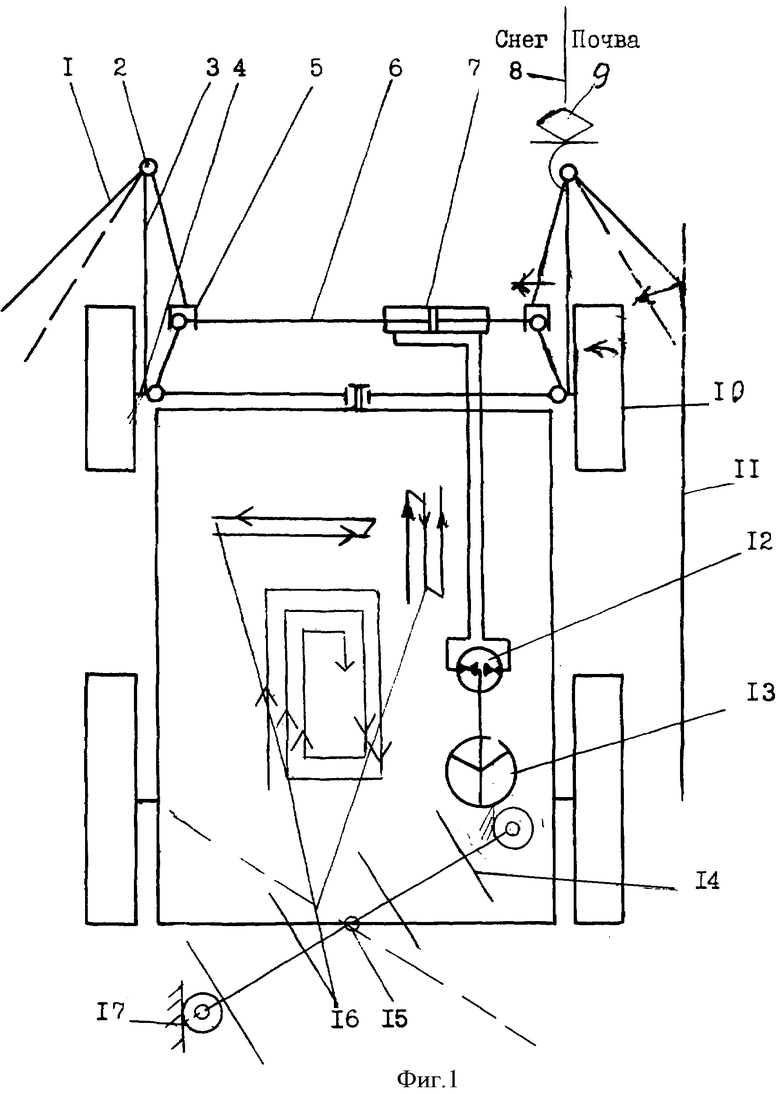
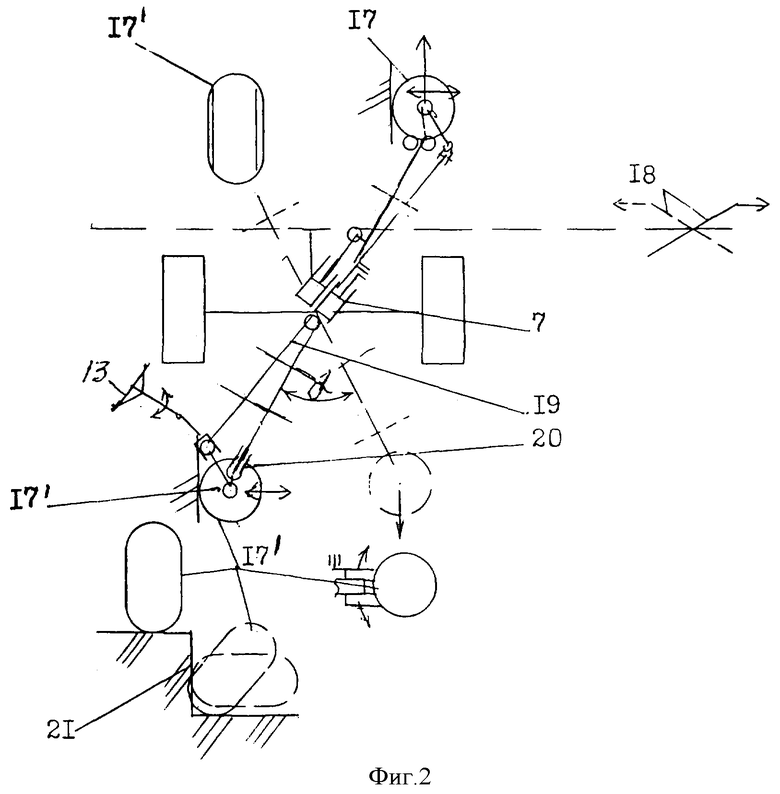
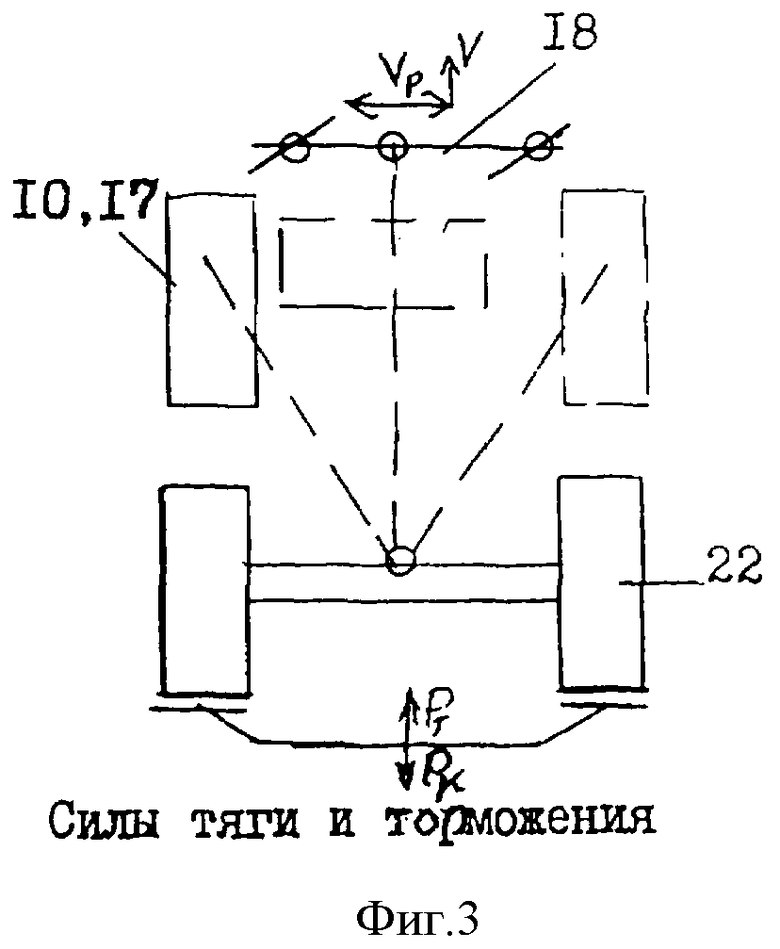
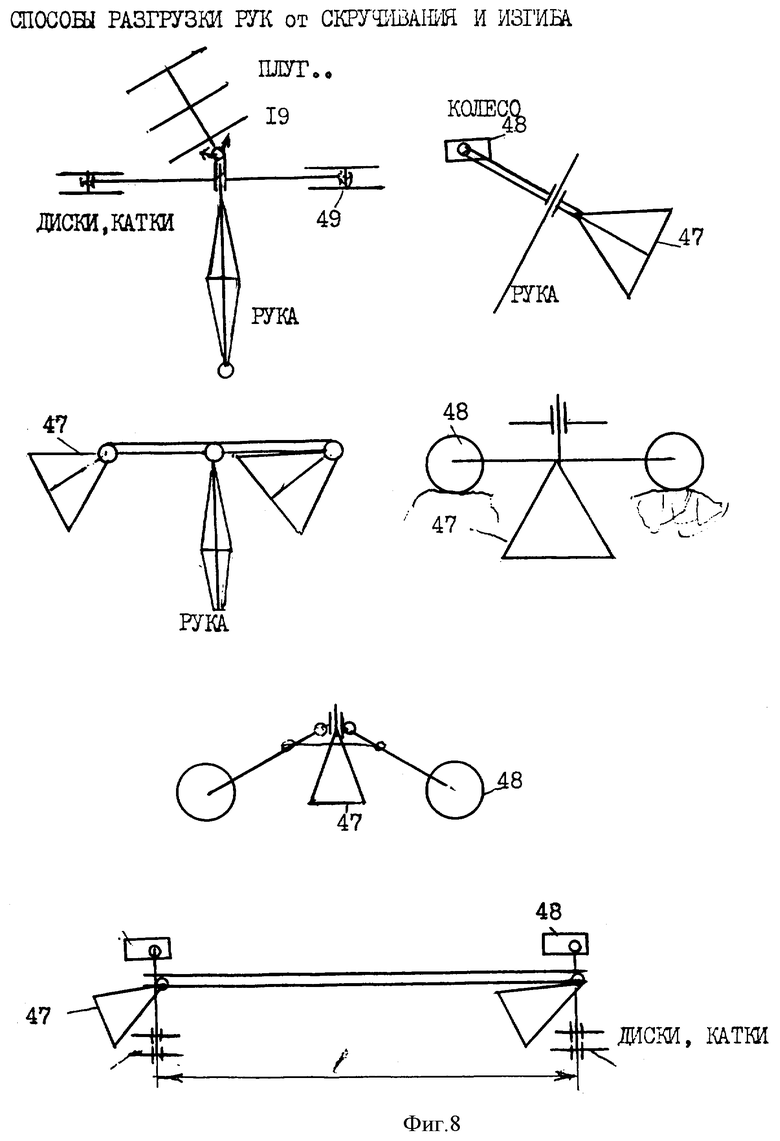
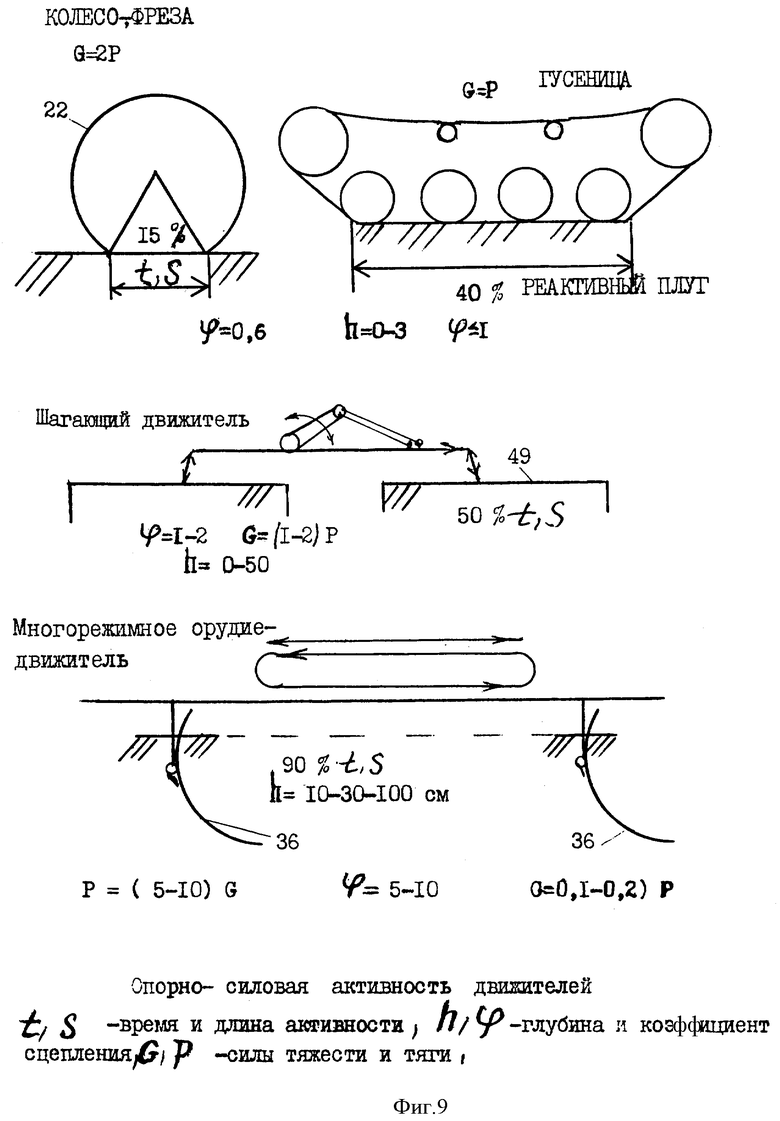
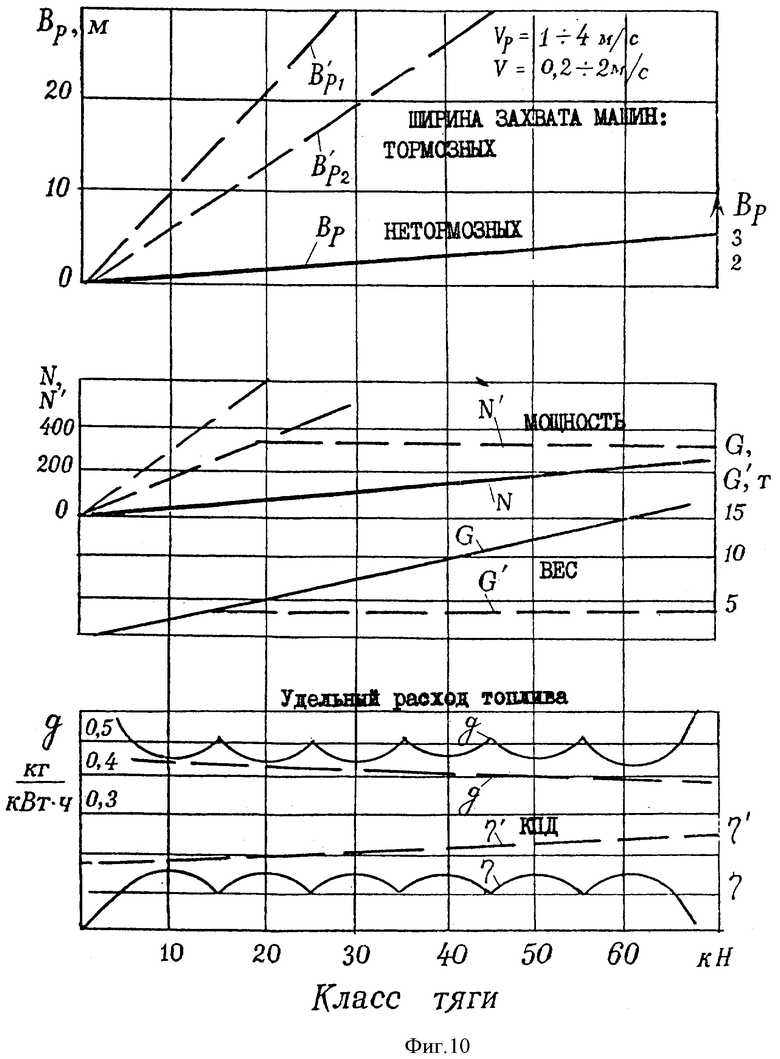
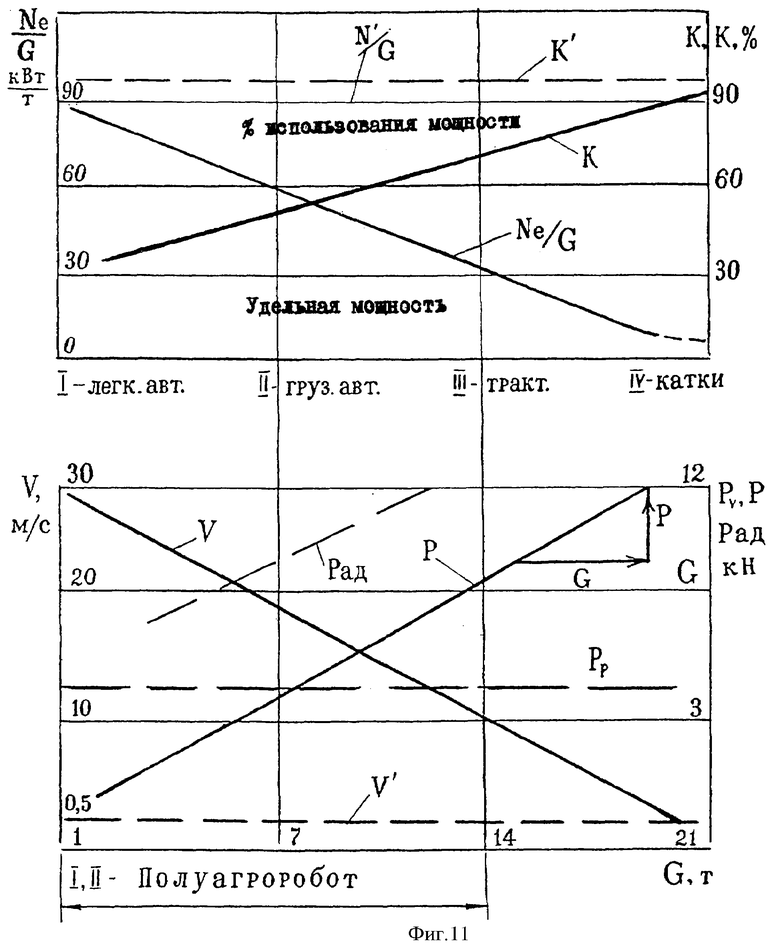
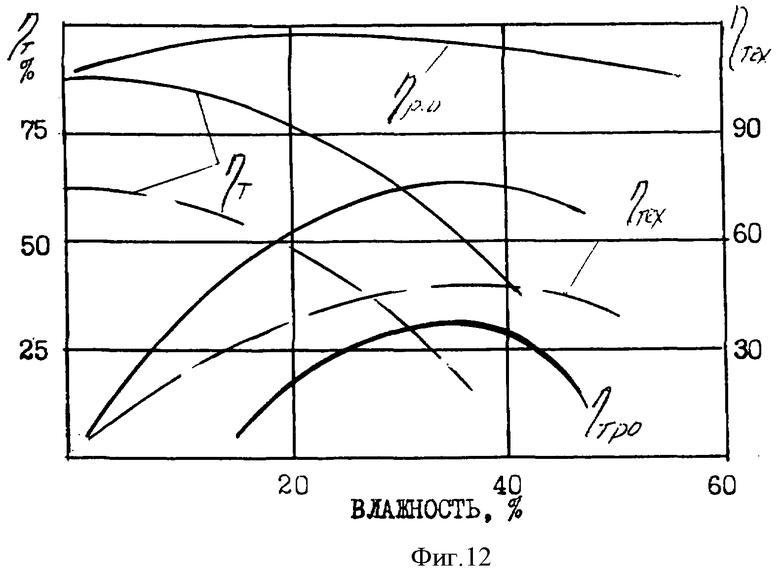
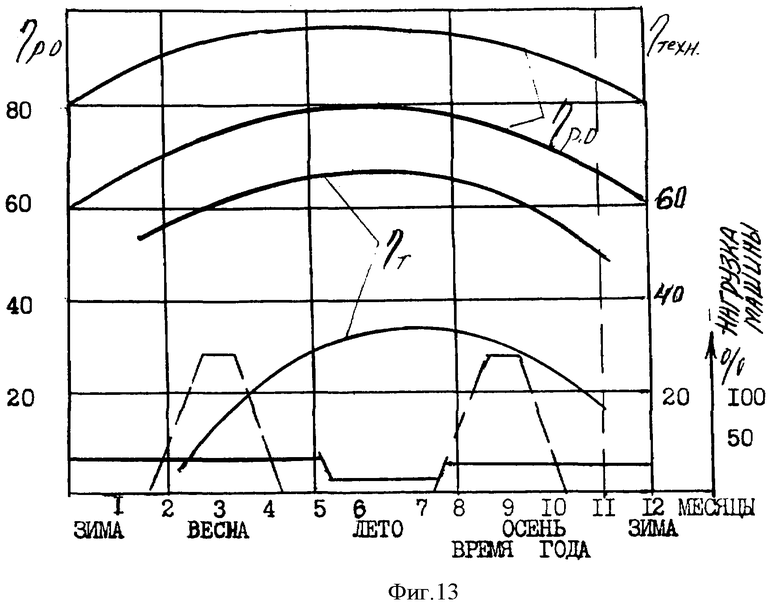
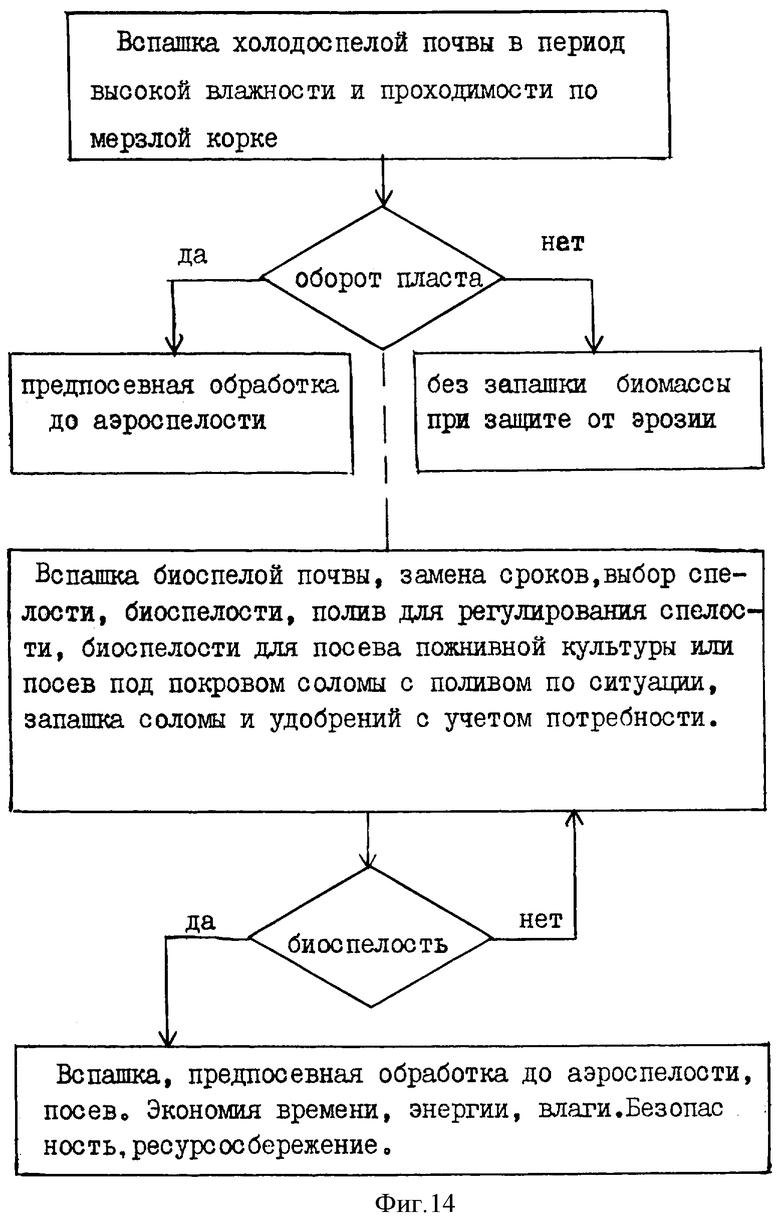
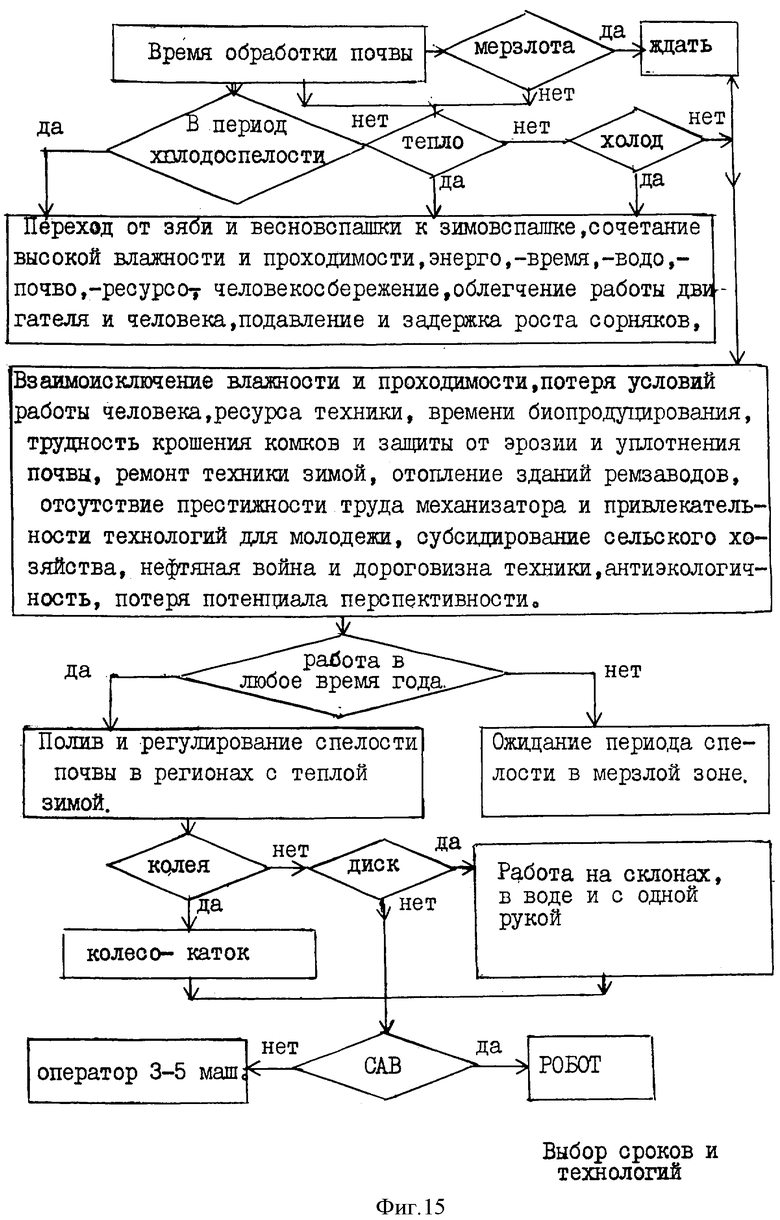
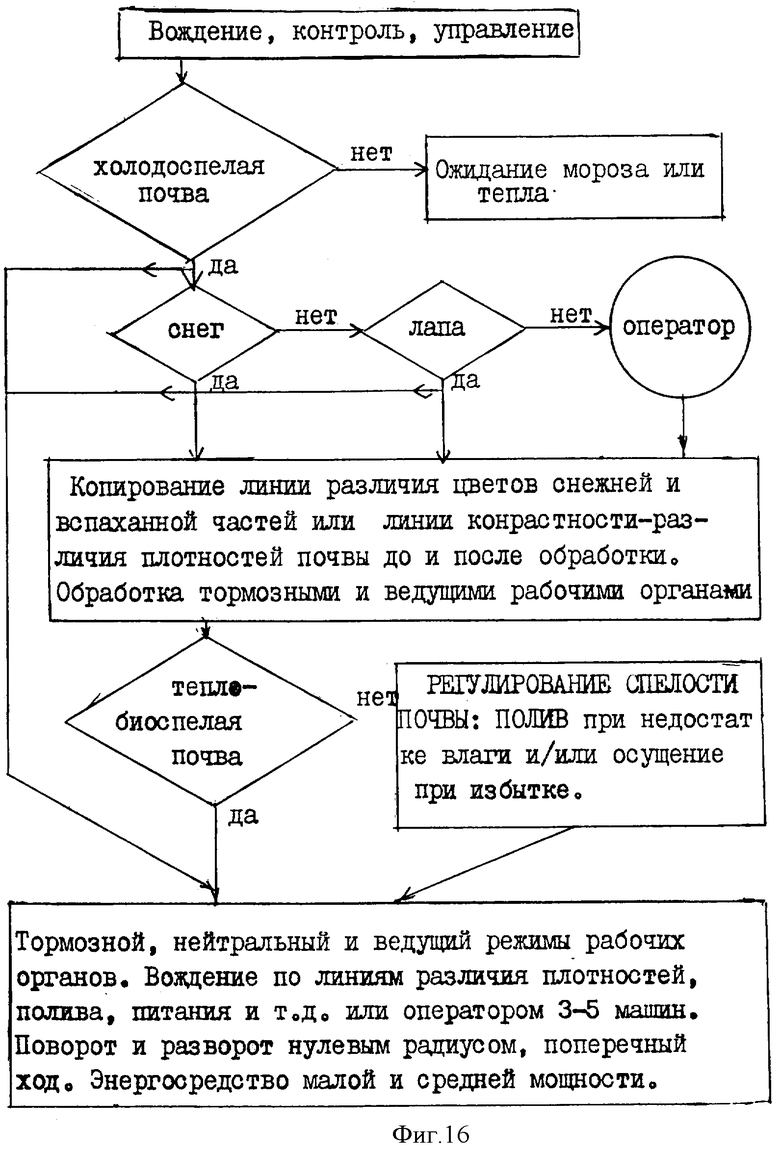
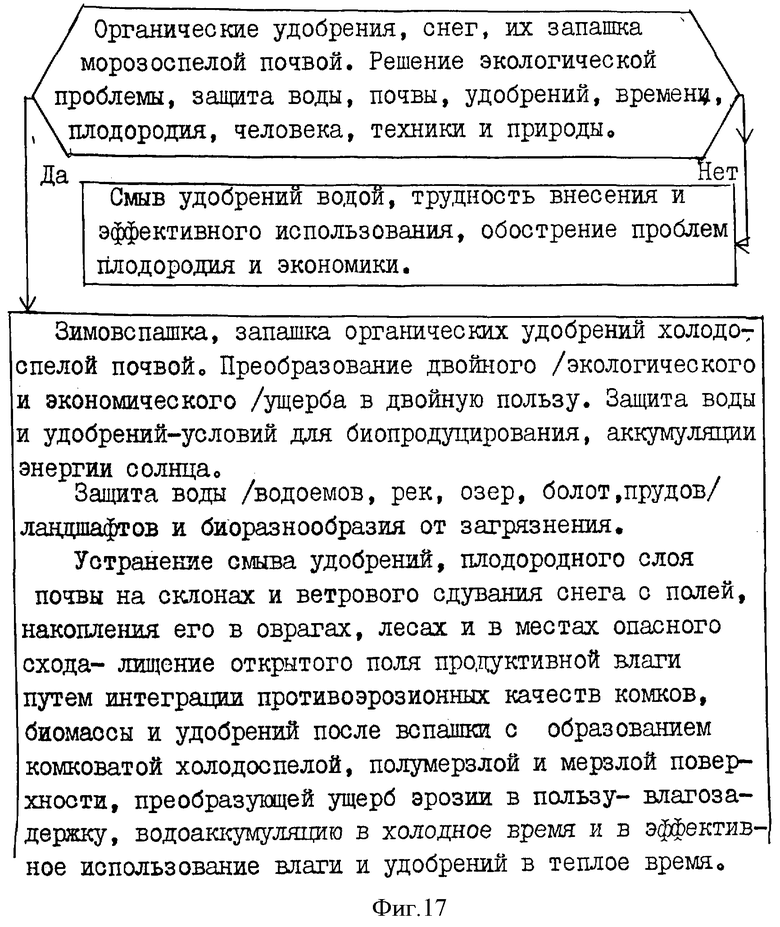
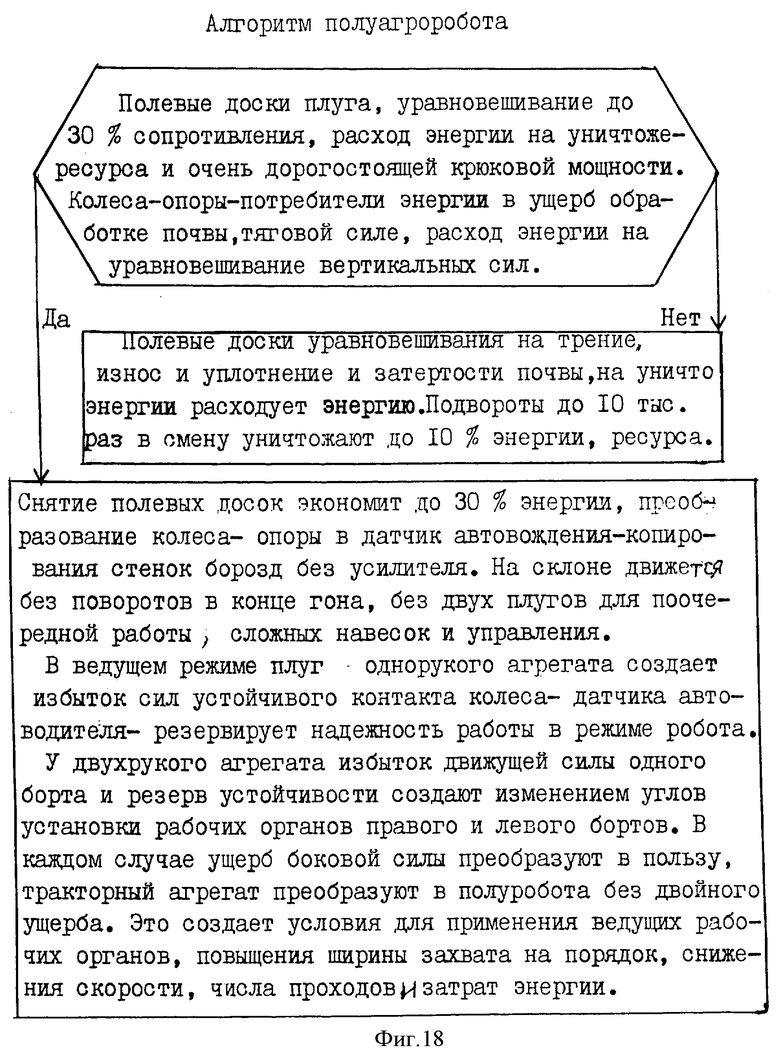
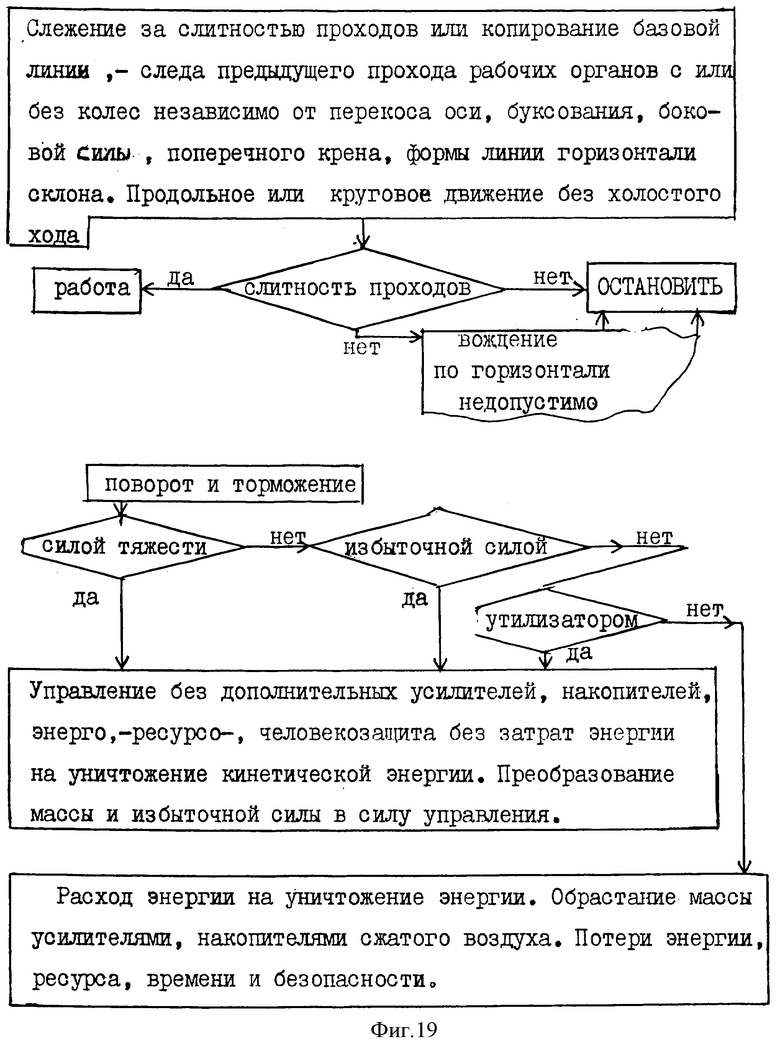
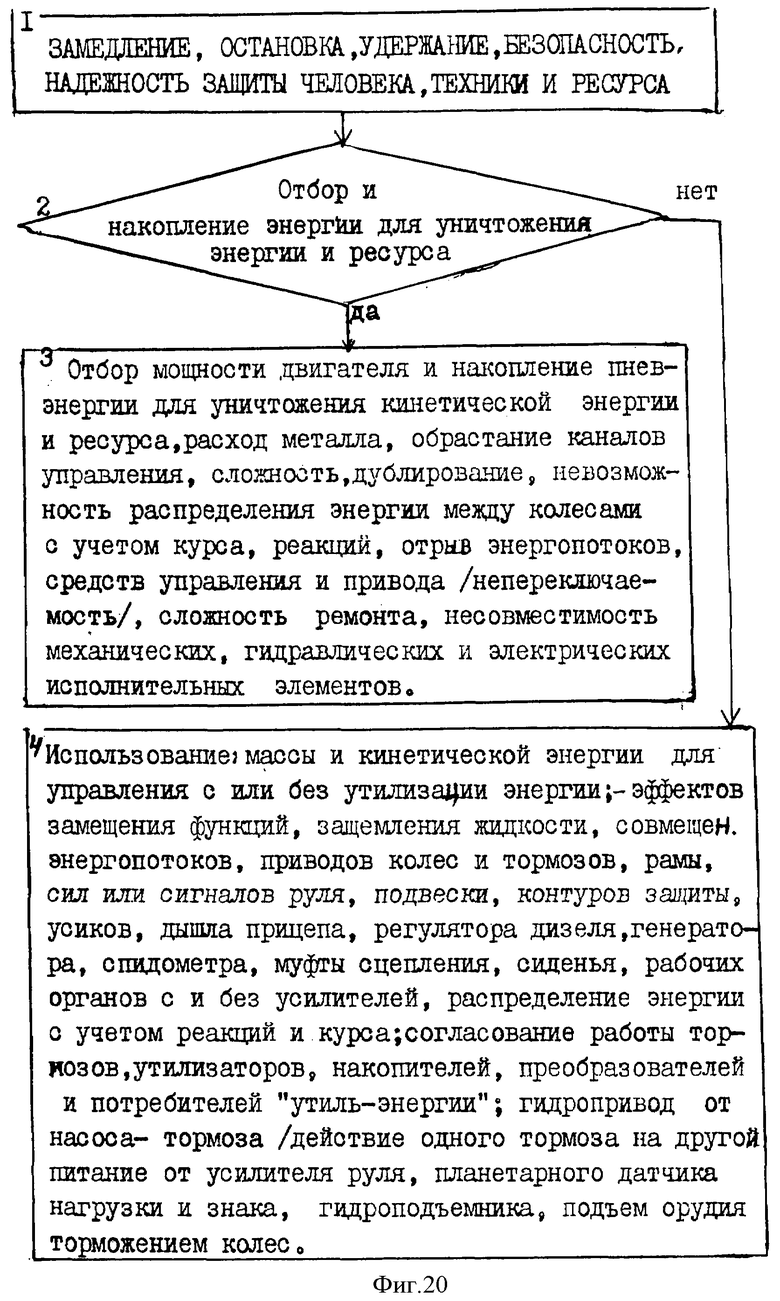
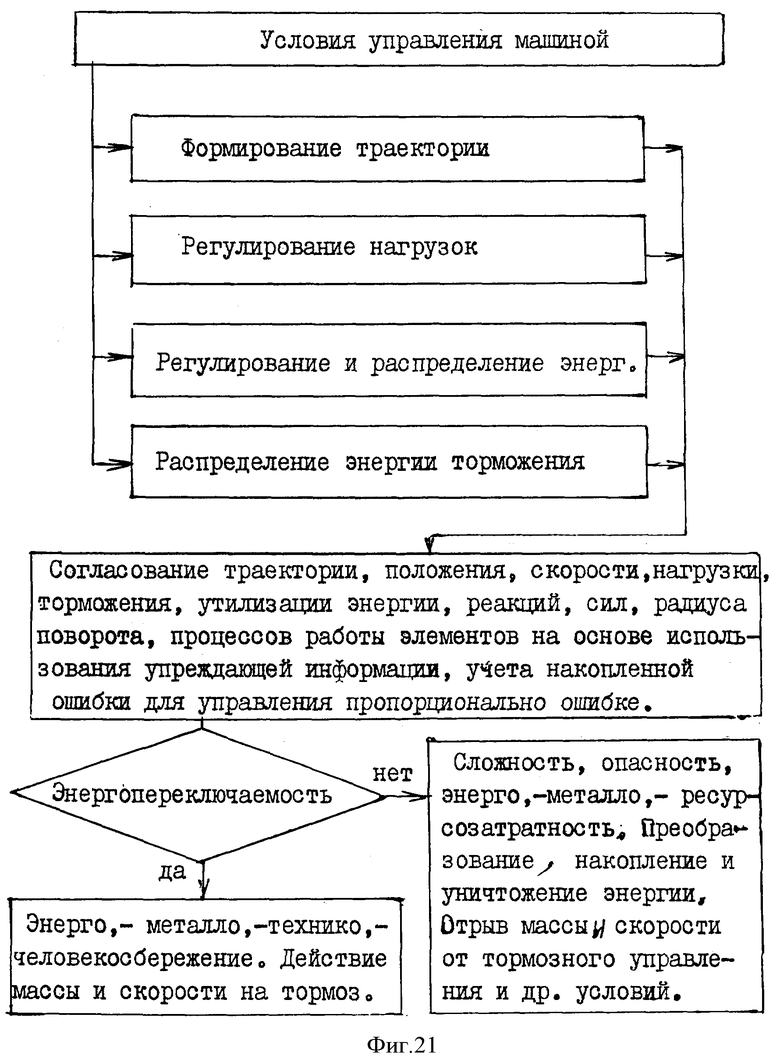
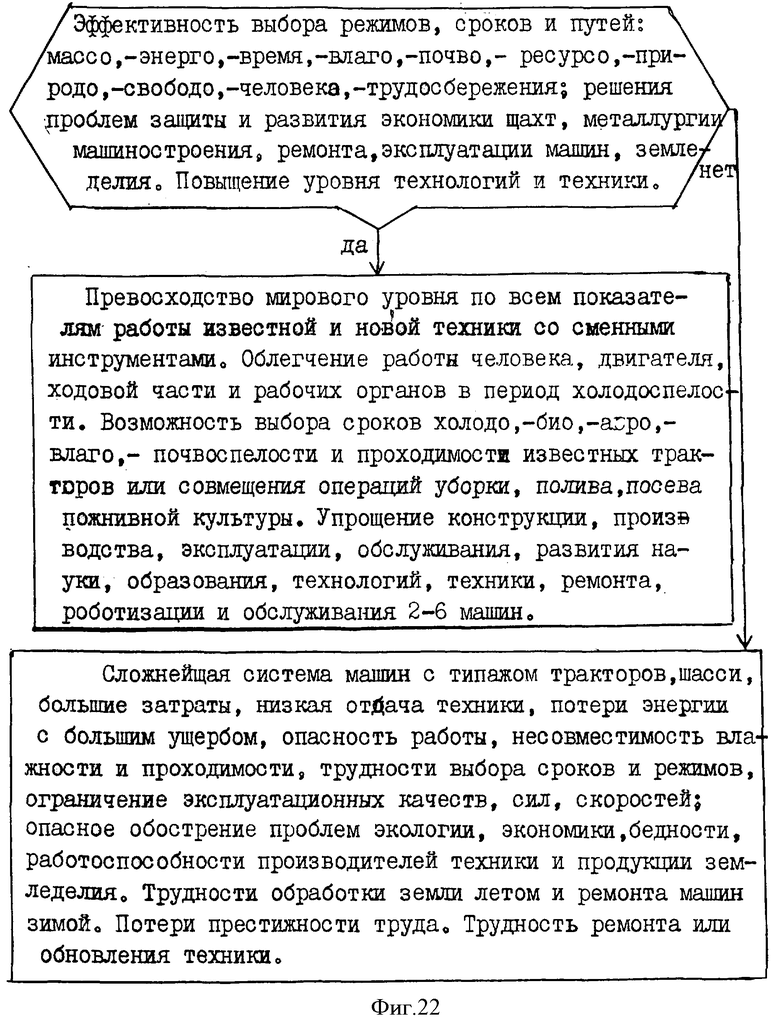
В графической части на фиг.1 изображена схема машины слежения за базовой линией и многоуровневой защиты, на фиг.2 - схема машины слежения за базовой линией - стенками борозд, на фиг.3 - сочетание машины и руки для ведущих рабочих органов, на фиг.4 - схема действия сил, резервирующих надежность вождения, защиты человека, техники и природы, на фиг.5 - варианты рабочих органов - источников движущей силы и силы формирования траектории движения, на фиг.6 - схемы рабочих органов для расширения функциональных возможностей и их сочетания, на фиг.7 - схемы приводов и рабочих органов самоподачи вперед в конце каждого хода, на фиг.8 - схемы принципов разгрузки механических рук от изгиба и скручивания руки привода, на фиг.9 - сравнение эффективности взаимодействий движителей с землей (почвой), на фиг.10 - сравнение параметров ширины захвата Вр, скорости V, мощности N, удельного расхода топлива и КПД машины с ведущими (со штрихом) и тормозными рабочими органами в пределах основного типажа тракторов, G-G' - силы тяжести, на фиг.11 - схема сравнительной оценки параметров различных машин и полуробота, на фиг.12 - диаграммы-зависимости КПД тракторов и ведущих рабочих органов от влажности, на фиг.13 - графики зависимости КПД, годовой нагрузки от времени года по месяцам и известным технологиям и новым, на фиг.14 - алгоритм определения биоспелости, на фиг.15 - алгоритм выбора периодов и режимов, на фиг.16 - алгоритм выбора способа управления, на фиг.17 - алгоритм сочетания снега, влаги и удобрений, на фиг.18 - алгоритм полуробота, на фиг.19 - алгоритм выбора допустимого контроля слитности, на фиг.20 - выбор формы энергозаграт, на фиг.21 - формы управления, на фиг.22 - оценка эффективности.
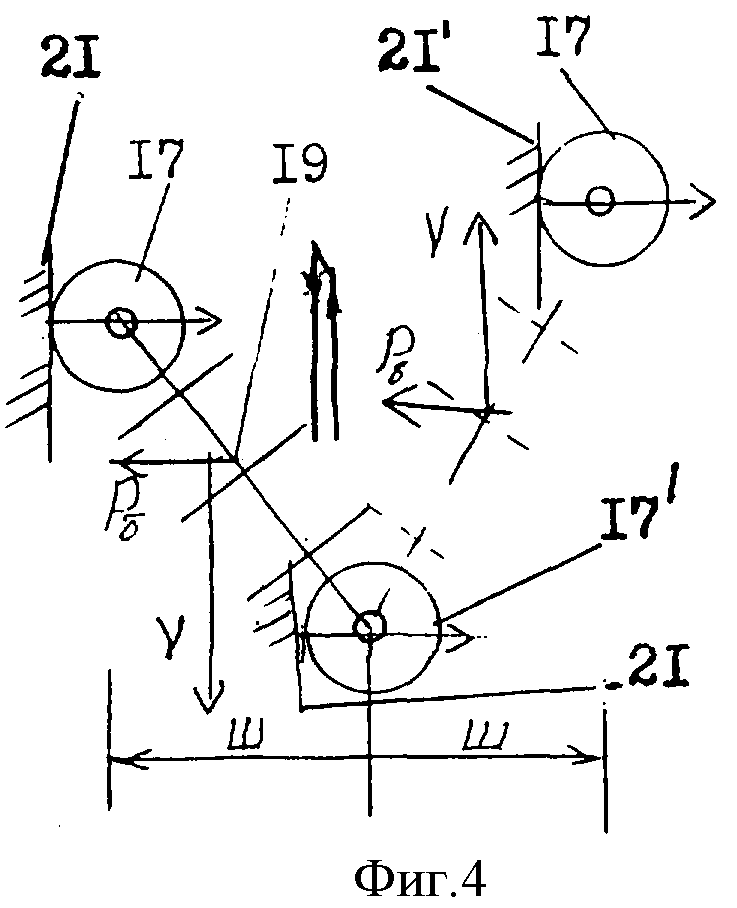
Машина содержит датчик 1 (фиг.1) в виде рычага на оси 2 рычага 3 колеса 4, рычаг 5, тягу 6 штока цилиндра 7 исполнительного элемента системы копирования линии 8 контрастности цветов снежного поля и почвы датчиком 9 и колесом 10 копирования рядка растений 11; насос 12 руля 13, рабочие органы 14 реверсивного хода на оси 15 для копирования линий 16, колеса 17, 17I (фиг.2), рабочие органы руки 18 реверсивного хода на брусе 19 оборотного рабочего органа, шарнир 20 для передачи сил стенкам 21, 21I борозд (базовых линий). В транспортном режиме колеса 22 для тяги и торможения с учетом настройки и боковых сил Рб, как это показано на фиг.3, при реверсивном движении со смещением на ширину III в конце гона.
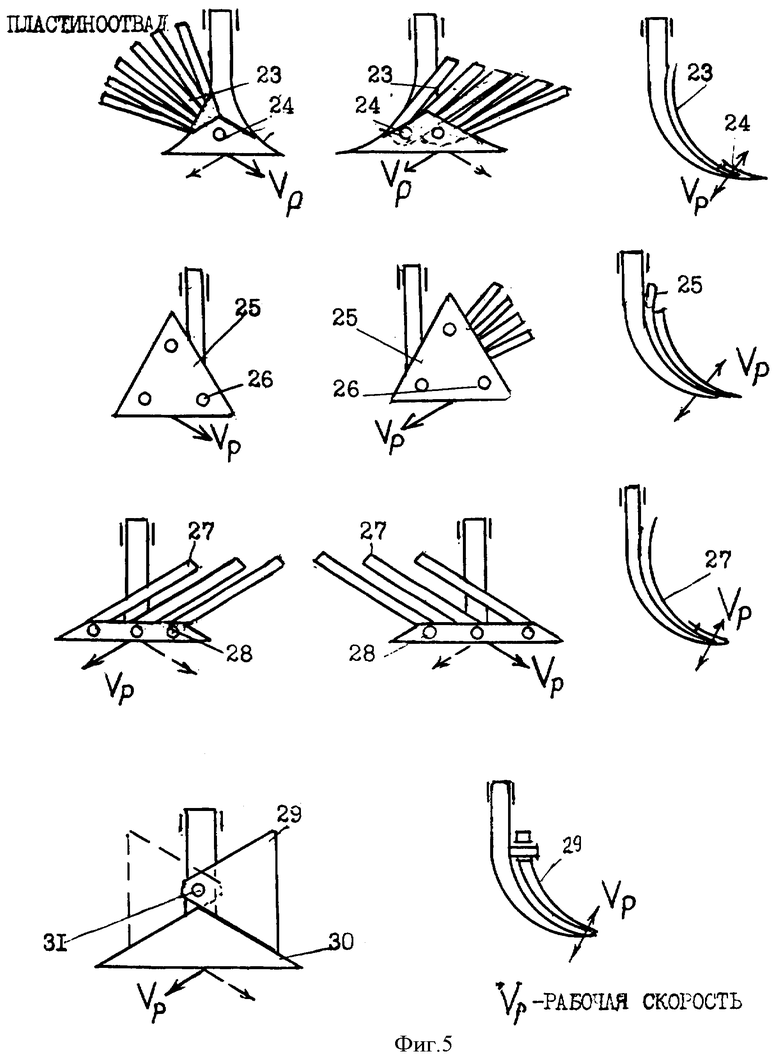
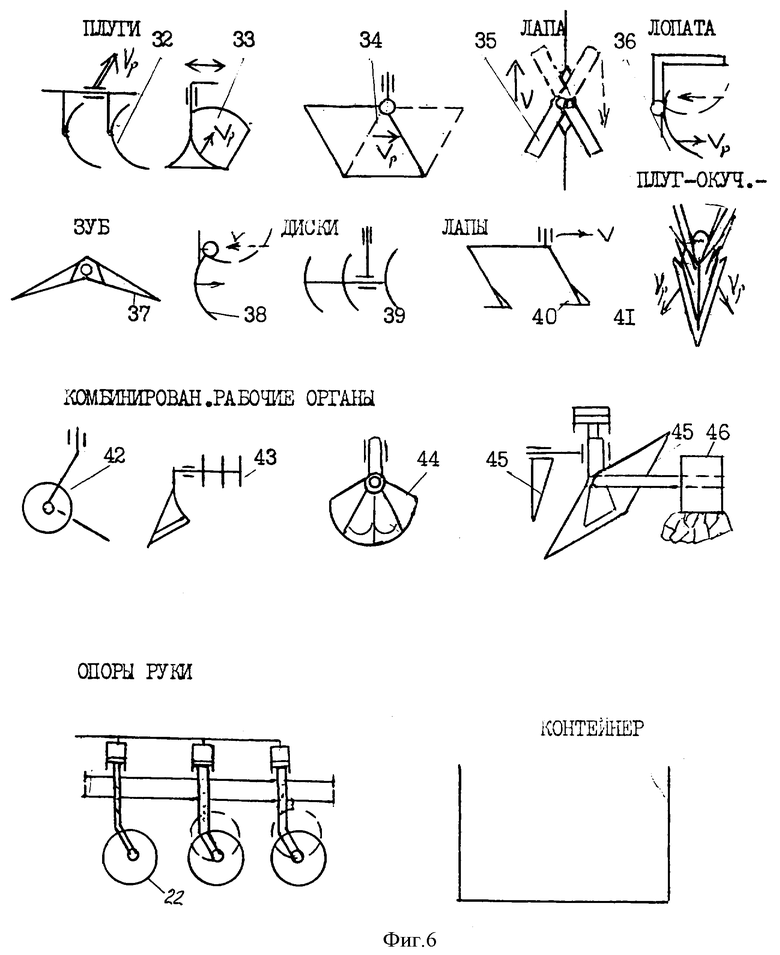
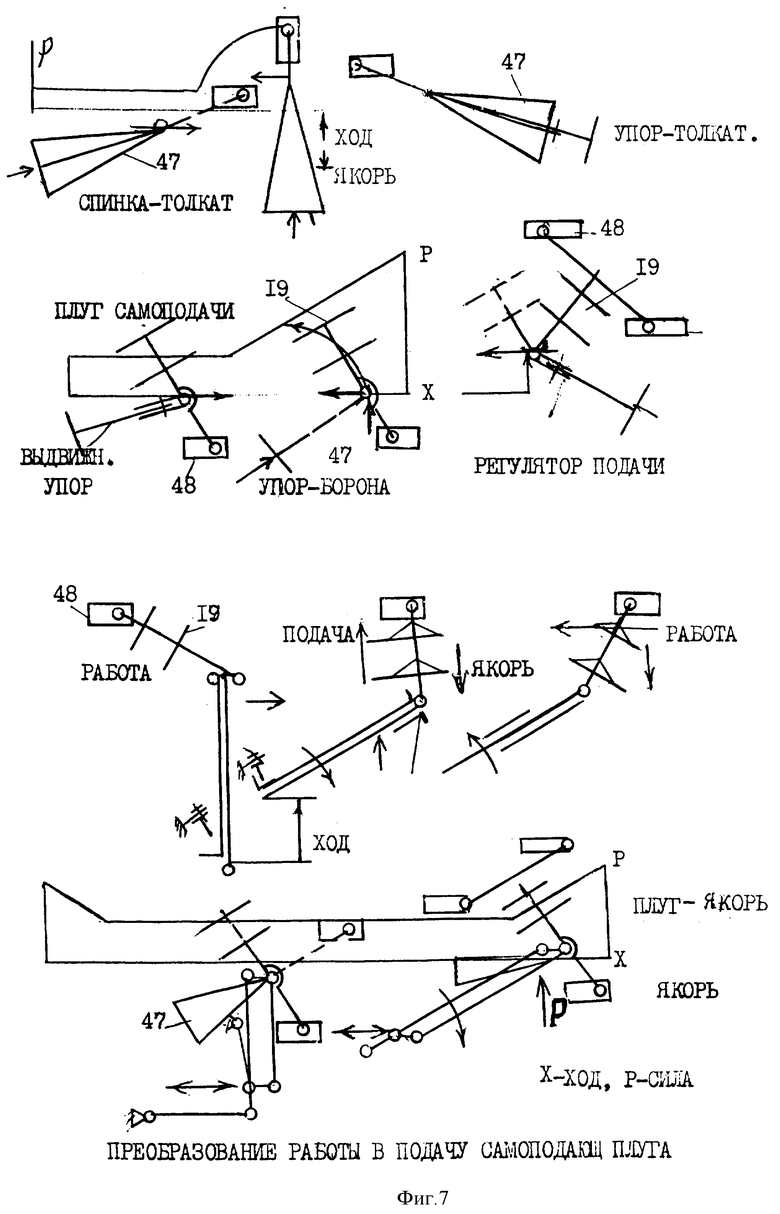
Рабочие органы для выполнения различных работ в реверсивном, тормозном, ведущем, защитном и др. режимах имеют пластины-отвалы 23 на оси 24 или отвалы 25 на осях 26, или пластины 27 на оси 28, отвал 29 над лемехом на оси 31. Рабочие органы 32, 33, 34 для вспашки, лапа 35, лопата 36, зуб 37, граблина 38, диски 39, лапы 40, бороздорез-плуг 41, каток, нож 42, плуг с дисками 43, маятниковыми крыльями 44, зубом 45, катком 46 автономно и в различном сочетании могут выполнять множество работ в земледелии и других отраслях. Рабочие органы 47 (фиг.7) со спинкой сзади (упором) для шагающей подачи вперед в период поворота на каждом конце поперечного хода, катки 48, шагающие движители 49 свехвысокого сцепления с почвой для повышения проходимости при малой массе. Машина может содержать и другие рабочие органы для выполнения соответствующих работ в различных режимах.
Машина работает и реализует способ обработки земли и управления следующим образом.
Датчик 1 на оси 2 (фиг.1) поворачивает колеса 4 рычагом 5 и без него рулевым управлением 7, 12, 13 копирует линии 8 или 11, формирует траектории 16 известным способом. Рабочие органы 14 на оси 15 настраиваются для реверсивной работы и копирования колесами 17, 17I борозд 21, 21I (фиг.2, 3, 4). Рабочие органы 14 на оси 15 поворачиваются на угол α и настраиваются на реверсивую работу и ровную обработку. Колеса 10 или 17 на поворотном брусе поворачиваются для совместного действия с рабочими органами 18 и поворота нулевым радиусом без участия ведущих колес 22.
При отклонении машины вправо от базовой линии давление колес 17 на стенки 21 снижается, боковая сила Рб возрастает, т.к колеса 10 поворачиваются датчиком с и без усилителя, повышается скорость правого колеса 22 и устроняется отклонение (ошибка). При отклонении влево, наоборот, колеса 17, стенки 21 и колеса 22 поворачивают вправо и устраняют отклонение. В каждом случае часть выходного сигнала обратным знаком подается на вход управления, как принято на всех машинах, и формирует траекторию. В случае контакта датчика 1 с препятствием (деревом, столбом, камнем…) машина отходит (отталкивается) или обходит его.
В варианте одноколесного исполнения (фиг.3) конструкция упрощается и режим робота адаптируется к склонам смещением колеса в сторону нижнего (по склону) колеса. Рука 18 на брусе 19 рабочих органов содействует повороту нулевым радиусом даже на склонах и снижает опасность опрокидывания.
Шаговое движение без тяговых сил колес 22 рабочими органами 47 (фиг.7) силами спинок и упоров-толкателей регулирует подачу. В режиме якоря-упора любой рабочий орган удерживает от отхода назад при шагающем ходе машины вперед. Для разгрузки рук от изгиба и кручения (фиг.8) установлены диски, катки, шпренгеля. Алгоритмы действия и результаты показаны на фиг.9-22.
От свойств и числа рабочих органов, расположения копиров базовых линий зависит время, в течение которого при поступлении на вход сигнала отклонение от целевой траектории примет требуемое значение (запаздывание действий). Известные усилители (не показаны) имеют бак, насос, распределитель и цилиндры.
Разгрузка колес от сил тяги, снижение скорости и числа проходов, повышение числа рабочих органов и ширины захвата на порядок соответственно снижает число проходов и ошибок перекопирования борозд. Копирование базовых линий двух борозд: следов предыдущего и последующего проходов с возможностью преобразования сопротивлений в силу движения и удержания машины - дает слитность проходов, быстродействие. Расположение рабочих органов впереди и на оси направлявших колес повышает точность контроля и управления слитностью проходов в режиме агроробота.
Рабочие органы 14, 18, 23-48 (фиг.5-8), их компоненты и секции вспашки 32-34, рыхления 37, сгребания 38, дискования 39, культивации 40, посева, посадки, нарезки борозд 41, выкопки и т.д. работают в режимах перемещения вдоль и поперек оси и базовой линии, в желаемом сочетании выполняют разные работы, повышают на порядок (фиг.9-13), как это пояснено алгоритмически на фиг.14-22. Переход от одной точки слежения к двум точкам (координатам) гарантирует работоспособность агроробота даже на склонах.
На склонах буксование, сползание вниз, перекос оси машины, увод от упругости и сдвига шин, эффект маятникового поведения динамики, смещение машин задней навески и другие возмущения можно компенсировать только слежением за двумя точками (координатами). Расположение рабочих органов на одной линии с направлющим колесом лучше гарантирует точность контроля (обзорность), управления слитностью проходов рабочих органов. Одна точка слежения может быть точкой даже разворота при буксовании ведущей оси, как это известно из "спортповорота" автомобиля при уводе.
Получить поворачивающий момент от направляющего колеса без дифференциала и ведущих колес рабочими органами 18 выгодно: кинематически снижается радиус поворота до нуля R=BVср/ΔV; ΔV=BVср/R, где В - ширина колеи, Vср - средная скорость, ΔV - разность скоростей. Отработка сигнала об изменении курса до заметного линейного отклонения (опережение управления) снижает число линейных отклонений машины и изменений знака обратной связи при реверсе. При этом допускается любой радиус поворота и разворота в конце гона. Важнейшие параметры механизмов поворота можно и нужно определять с учетом возможности упрощения конструкции и повышения безопасности для человека, техники и природы. Это возможно унификацией, саморегуляцией и содействием направляющего колеса ведущим без торможения до срабатывания дифференциала, без торможения борта, очувствлением и содействием даже рабочих органов в сопротивляющейся среде вне дорог. Слежение за слитностью проходов рабочих органов на склонах, упрощение поворота до его устранения на склоне совершенствует способ и средства управления до идеала.
Машина содержит реверсивные рабочие органы продольного и поперечного хода для обработки почвы в различных (и горной) зонах независимо от крутизны и влажности склона.
Во время работы бороздовые колеса прижимаются к бороздам боковой силой рабочих органов, уравновешиваются боковые силы энергетического и технологического модулей, и на склонах обеспевается слежение за двумя точками - слитностью проходов рабочих органов. При этом ошибка копирования борозды - базовой линии - снижается благодаря большой ширине захвата и слежения за двумя точками. Слежение за рядком растений и линией контрастности цветов и различия плотностей снежной (необработанной) и обработанной почвы также повышает значение экологической и агротехнической спелости (готовности) почвы и эффективности совмещения и повторения работ, технологий и техники - совместимости требований человека, техники, растений, почвы и робота без сложных систем управления. Общим результатом является повышение производительности, экономичности и экологичности.
Кинематико-динамико-управляющие функции машины на склонах (рулевая, креновая, скользящая, сползающая, шинная, уводящая, тормозная), влияние разностей нагрузок, радиусов колес, скоростей, реакций нарушают слитность проходов рабочих органов, всякое управление без запаздывания. Запаздывание пропорционально смещению рабочих органов от направляющих колес и исключает вождение по горизонталям из-за нарушения слитности проходов.
Установка рабочих органов на оси направляющих колес устраняет запаздывание управления (бокового смещения) и упреждение, возникающее при установке рабочих органов впереди оси направляющих колес.
Траекторию движения в теплое и холодное время формируют копированием рабочим органом-датчиком базовой линии контрастности механических свойств и/или плотности почвы до и после обработки с возможностью снижения сопротивления рабочих органов в период морозоспелости (холодоспелости). Сочетают высокую влажность холодоспелой почвы с проходимостью машин в холодное время или аэроспелостью в теплое время.
Движение в режиме робота в любой (и горной) зоне обеспечивают копированием колесом-заменителем полевых досок на поворотной секции реверсивных рабочих органов, преобразуют в силу управления и преобразования машины в робота. На краю поля секцию рабочих органов поворачивают и изменяют направление движения, и рабочие органы прижимают боковой силой колесо-датчик 17 или колеса-датчики к стенке или стенкам 21 борозды или борозд до и после прохода, и боковую силу всех рабочих органов (ведущих, нейтральных и тормозных) преобразуют в резерв и силу автоматического вождения с экономией до 30% мощности технологической и до 10% мощности управления. В привод рабочих органов вводят вибрацию в период холодоспелости и по мере снижения плотности и сопротивления пропорционально снижают вибрацию. Силу инерции или тяжести преобразуют в силу управления или энергопотоки переключают от ходовой части к механизмам управления или торможения и снижают запаздывание и опасность без непрерывного отбора и/или накопления энергии (сжатого воздуха) для уничтожения энергии. Энергопотоки переключают с возможностью подъема рабочих органов торможением ходовой части. За счет снижения скорости управляют курсом, радиусом, тормозами и рабочими органами.
Оборот пласта вниз по склону преобразуют в силу противодействия уводу и сползанию машины и без полевых досок и поворотов, преобразуют машину в робота, преобразуют ущерб в пользу и ведущими рабочими органами устраняют колею и нагрузку колес. Колесо плуга мягко корректирует (при воздействии водителя) курс и при включении привода создает ведущую силу.
Колесом замещают функции рабочего органа, полевых досок копира вертикальной стенки, опоры, направляющего колеса - средства поворота нулевым радиусом, ведущего колеса поперечного хода, тормоза гравитационного для замедления, остановки и удержания машины без отбора мощности, без усилителей и накопителей энергии, без запаздывания и опасности из-за отказа или аварии этих компонентов. Бороздное колесо в поле установлено с возможностью качения по стенке или дну и стенке с возможностью преобразования сопротивления полевых досок в движущую силу в ведущем режиме, в силу управления и преобразования машины в робота применительно к внешним условиям.
Снег и органические удобрения запахивают влажной почвой в морозоспелое время. Семена сорняков с мерзлой коркой запахивают, задерживают их проростание или уничтожают, создают условия для формирования урожая посевной культуры. При любой вспашке механизм навески переводят в трехточечную схему, колесом копирования борозды создают перекос оси и создают эффект повышения скорости правого борта и поворачивающий момент устранения непрерывного увода вправо, эффект повышения избыточной силы ведущих рабочих органов, эффект повышения надежности управления и курсовой устойчивости. При работе с одной рукой привода ведущих органов избыточной силой прижимают колесо к стенке борозды и превращают в робота.
Почвы созреваются без осушения - снижается твердость и липкость, условия для роста сорняков и испарения влаги.
Спелость почвы определяется состоянием влаги, степенью замерзания, внешней температурой и глубиной промерзания, устранением или снижением липкости и выворачивания глыб. Морозоспелую почву можно считать готовой, если глыбы не выворачиваются или очень легко крошатся. Сроки и способ сочетания известных методов вспашки, лущения, боронования и т.д. определяют с учетом зоны, типа почвы, толщины снега, возможности запашки ровным слоем почвы, экономично и более эффективно, чем осушением. Критериями оценки являются энерго-, влаго-, почво-, ресурсо- и времясбережение, защита человека, техники и среды, урожайность и экологическая безопасность.
Ввиду того, что известная спелость осушением теряет влагу, посев и посадка требуют увлажнения и подогрева почвы (биологической спелости); сроки спелости проходят быстро (иногда часами), влажность и осушение (две крайности) затрудняют обработку и дообработку глыб, сочетать влажность до подогрева трудно осенью и весной, сочетают в новом способе физическую спелость с холодо- (морозоспелостью) без потерь влаги и тяговой силы переводом рабочих органов из тормозного режима в нетормозной, продлеванием агротехнических сроков. При этом семена сорняков внизу часто теряют всхожесть, глубина и недостаток тепла и воздуха затрудняют их рост, они появляются позже посевной культуры. Свободная вода в виде снега и льда не стекается быстро вниз, таяние задерживается под покровом почвы, задерживает биологическую спелость нижнего слоя почвы. Холод готовит почву к обработке без осушения, влага кристаллизуется, липкость снижается, проходимость техники повышается, трение снижается, появляется явление трения и жидкой смазки в контакте с рабочими органами.
В прохладное время улучшаются условия работы человека, двигателя и рабочих органов: запыленность снижается, агросроки продлеваются, солнечная энергия используется более продолжительное время, земля после обработки зимой становится чернее, скважистее и поглощает больше тепла, повышается время фотосинтеза, исключается уход урожая под снег, облегчается получение нескольких урожаев в год. Запашка воды и удобрений снижает потери влаги и удобрений, смыв их водой, облегчает засушливое земледелие, зимовспашка становится альтернативой плоскорезной обработке. В теплой зоне спелость регулируется поливом из борозд - базовых линий автовождения.
Снижение нагрузки ходовой части и зависимости движущей силы от влажности почвы облегчает обработку рисового поля, работу в воде, под водой и на склоках.
Метод обработки земли в холодоспелом состоянии в зоне сухого земледелия является спасением от засухи и влагообеспечением растений. Он облегчает использование влаги и тепла весной. Малая нагрузка ходовой части снижает: уплотнение почвы, силы трения и сцепления между частицами, напряжения и деформация почвы. Это больше соответствует требованиям растений, устраняет противоречивость требований растений и техники к почве (повышение влажности не влияет на проходимость).
Обработка влажной почвы (до осушения) несовместима с работой известной техники. Ходовая часть трактора уплотняет влажную почву, оставляет глубокую колею, истирает ее, теряет проходимость до нуля, снижает урожай, увеличивает сопротивление резанию и крошению комков. Для растений требуется низкая плотность и твердость, для ходовых систем, наоборот, высокая. Почву осушать, терять влагу, время, энергию солнца и техники, ресурс и урожай вредно, а после запашки твердого слоя крошить комки многократной дополнительной обработкой, терять агросроки и довести созревание урожая до наступления холодов или увести урожай под снег или/и в южной зоне отказаться от дополнительного урожая вредно. Холодовспашка, т.е обработка, холодоспелой, влажной почвы агротехнически, экономически и технически выгодна, а засушливой зоне остро необходима.
Преобразование влаго-, время- и энерготеряющих, почвоосушающих; биосинтезотормозящих, полусухоземледельческих технологий в высокоэкологично-, время-, водо-, энергосберегающие технологии повышения: эффективности использования влаги, времени, энергии солнца (света и тепла) и топлива; производительности урожая, КПД природы, технологий и техники входит в сферу интересов многих отраслей и стран. Холодоспелость влияет на: влажность, сочетаемость аэробных и анаэробных процессов; пробудимость почвы к жизнедеятельности, биосинтезу, восприятию света и тепла солнца, т.е. работоспособность техники, достаток влаги и времени для роста растений. Преобразовать противодействия факторов в содействие созданию биопродукции при разумном регулировании и управлении жизнедеятельностью почвы, растений и процессом круговорота веществ без отрицательного ограничивающего действия колеса, гармонией КПД природы и техники при реализации высоких агроэкотехнологий выгодно, как это подтверждено практически.
Формирование траекторий 16 (фиг.1) кругового и реверсивного движения возможно усилителем 7, рулем 13, колесами 17 копированием борозд 21 (фиг.1-4) при обороте пласта вправо и влево. Толкающие и боковые Рб силы ведущих и шагающих и тормозных рабочих органов преобразуются в управляющие силы колес. Эти силы и боковые силы тяжести уравновешивают и содействуют вождению и слитности проходов. Копирование двух линий или точек (через две точки можно провести одну линию, через одну - много).
На фиг.10-13 показаны изменения показателей: Вр, Вр I - ширины захвата рабочих органов (фиг.10) при мощности N, N' и веса С, СI, удельного расхода топлива g, g' и КПД η тракторов всех классов тяги; удельной мощности N/G и процессов ее использования в машинах, их скоростей V, VI, сил реакции Рp, зависимости силы тяги Р от веса трактора в режиме полуагроробота.
Ходовая часть, ее способность преобразовать массу агрегата и балласта в силу тяги или торможения определяет проходимость, тяговый класс, управляемость, устойчивость, производительность, плавность хода, потери влаги, энергии ресурса и времени, силу и сопротивление сжатию цепи нагрузки. Поэтому на ходовую часть приходится вся нагрузка от сил тяги и торможения, 40% потерь энергии и ресурса, 90% мощности двигателя, 60-80% массы и проблемы развития технологий и робототехники, адаптации ее к местности (рельефу, влажности), условиям дистанционной работы в огне, воде, зараженной зоне, 100% паразитной мощности и ущерба от распределения энергии между колесами без учета реакций почвы и курса из-за отключения забегающих колес дифференциалом свободного хода или остановки колеса с лучшим сцеплением, опасности блокирования простого дифференциала и потерь проходимости, времени (агросроков) на осушение полей. Энергосредство, трактор, автомобиль, комбайн, дорожная, боевая, землеройная, пожарная, плавающая, подводная автономная и электроприводная техника имеют жесткие ограничения функций и показателей.
Графическое пояснение изменений технологического η и технического ηтех и рабочих органов ηтро, ηт, нетормозных рабочих органов ηро от влажности указывает на потенциал влагосберегаемости. Потенциал использования влажности и времени года (фиг.13) повышается, создаются условия для повышения КПД биоклиматического потенциала - перехода к обработке биоспелой почвы и реализации алгоритмов (фиг.14-22), которые содержат сопутствующие указания и пояснения.
Эффективность использования металла, времени, рабочей площади контакта протектора у колес и катков составляет 10-15%, у гусениц - 40%, рабочих органов реверсивного хода 90-100%. Уплотняющая сила в два раза превосходит тяговую. Противодействие колес и рабочих органов преобразовать в их содействие выгодно, а перевод колес в режим рабочих органов снижает колею до нуля и снимает проблемы экологии и совмещения операций. На вспашке на метр ширины захвата приходится 3-5 тонн массы, а ведущие рабочие органы при ширине захвата 10 м снижают эту удельную массу до 0,2-0,3 тонн/м, т.е. более 20 раз.
Колеса, катки, диски (рабочие органы качения) имеют холостой ход более 80% времени t и длины дуги S (фиг.9).
Увеличение числа опор на транспорте и снижение опорных функций при обработке земли (перевод опор в технологический режим) преобразуют ущерб действия в технологическую пользу, повышает адаптивность и эффективность работы в любой зоне на всех операциях. Фреза имеет высокую активность резания почвы, чем режущий реверсивный инструмент. Энергоемкость и эффективность воздействия на почву по сечениям малого сопротивления крошения комков и ширина захвата фрез на порядок ниже, чем у реверсивных рабочих органов.
Снижение на порядок скорости и нагрузки колес, колебаний рамы, потерь мощности на рассеивание и затрат на множество проходов по полю способствует энерго-, ресурсо-, здоровье-, почвосбережению (снижению массы и стоимости трактора). Снижение тяговых сил колес до нуля возможно путем преобразования тягового сопротивления рабочих органов частично в толкающую силу. Преобразование колес в рабочие органы для крошения комков после вспашки открывает новые возможности развития технологий.
По мере преобразования опорных функций колес в технологически полезную силу крошения комков ослабляют или устраняют зависимости производственных показателей от масс, классов тяги, скоростей, коэффициентов сцепления, тяги и буксования.
Производительность тракторов и машин с тормозными рабочими органами при обработке земли ограничивают силы/массы, затраты энергии, уплотнения почвы (или скорости) числа проходов, затраты энергии и уплотнения почвы. В каждом случае ущерб экономике, экологии и ресурсу пропорционален производительности.
Для поиска путей повышения экономичности нужно оценить расход и КПД агрегатов при обработке земли. На самопередвижение расходуется более 10% энергии (КПД ηf=0,9%); на буксование - 20% (ηб=0,8); на повороты и подвороты при формировании траектории на равнине и на склонах - 10% (ηп=0,9), на гашение колебаний подвеской и шинами - 10% (ηg=0,9), из-за неточности управления энергопотоками (распределение энергии между потребителями) и циркуляции паразитной мощности в трасмиссии - 10% (ηэ=0,9).
Снижение многих потерь, скоростей рабочих органов Vрс - 3-4 м/с до 1 м/с и трактора с 3-4 м/с до 0,1 м/с многократно повышает ресурс, экологичность и экономичность. Требуемая мощность  30>5; 90>15. Ниже 6 раз. Это справедливо при равенстве КПД приводов колес и рабочих органов и устранении тяговых функций колес. Преобразование массы (ущерба) в технологический фактор удваивает полезность, превращает колеса в рабочие органы (катки для крошения комков после вспашки) - регуляторы аэро-, влагоспелости почвы.
30>5; 90>15. Ниже 6 раз. Это справедливо при равенстве КПД приводов колес и рабочих органов и устранении тяговых функций колес. Преобразование массы (ущерба) в технологический фактор удваивает полезность, превращает колеса в рабочие органы (катки для крошения комков после вспашки) - регуляторы аэро-, влагоспелости почвы.
Снижение скорости движения трактора и повышение ширины захвата агрегата в 10 раз перемещением нетормозных рабочих органов с учетом совместимости 2-4 операции в 20-40 раз снижает число проходов трактора по полю. При этом достаток движущей силы рабочих органов (разгрузка колес), снижение массы ходовой части в 2-3 раза повышает ресурс и энергонасыщенность с 25 лс/т до 75 лс/т при той же мощности двигателя за счет экономии металла в тракторостроении. Ведущие рабочие органы снижают число типов машин на 100-200, экономят металл и энергию в почвомашиностроении, защищают человека и природу в земледелии.
На вредное действие расходуем больше энергии и металла, чем на полезное, а более 50% мощности двигателя только причиняет ущерб ресурсу, почве и урожаю. Поэтому стоимость продукции земледелия повышается, требуются субсидии, следовательно, большой моральный и материальный ущерб затрагивает все мировое сообщество.
Машина с ведущими рабочими органами устраняет потери и их ущерб, преобразует тройной ущерб (человеку, ресурсу и природе) в пользу, т.е. повторяет полезное влияние, изменяет знак, превращает недостатки в достоинства: коэффициенты вредного действия (КВД) буксования, массы, качения, сцепления, тяги, уплотнения в полезное действие без побочного ущерба, управляющую нагрузку человека в адаптивность машины к внешним условиям, в возможность контроля, настройки, познания явлений и свойств. Пропорционально скорости движения известных тракторов снижается опасность и напряженность работы, число базовых линий, ошибок управления, поломок и аварий. Это экономит топливо и металл, защищает сырье, шахтеров, рабочих заводов и механизаторов, развивает земледелие в регионах достатка солнечной энергии и опасного избытка воды на Севере, способствует устранению бедности, безработицы, террора, войн - решению проблем социально-политического и научно-практического развития.
Преобразование функций массы - начало нового "света" всех школ механизации земледелия легко реализуется догрузкой и разгрузкой рабочих органов и ведущих колес в различных режимах.
Обработка холодоспелой почвы и сопутствующая защита человека, техники и почвы, преобразование отрицательного влияния теряемой (около 30%) энергии двигателя и еще до 10% для ее отвода (привода насоса и вентилятора системы охлаждения) выгодно снизить и использовать для подогрева кабины зимой и охлаждения летом, создания условий для человека и повышения престижности труда механизаторами качества экологической защиты.
Преобразование боковой силы в фактор повышения курсовой устойчивости (выпрямление траектории), снижение на 10-15 тысяч поворотов в смену и устранение затрат до 20% мощности для регулирования скорости достигается попутно с устранением потерь мощности полевыми досками (при впашке).
Даже гусеница - источник потерь 70% энергии в ходовой части, зимой взаимодействует с водой, снегом, льдом (мало с песком), т.е. режим работы преобразуется в щадящий, и ведущие рабочие органы снижают до нуля или преобразуют функции руля.
При этом недозрелая или перезрелая холодоспелость (глубокое промерзание или липкость) снижает эффективность или благо человека и выгоду, преобразует ее в ущерб. Поэтому изменяют сроки и регулируют процессы по алгоритмам (фиг.14-22), Боковая сила рабочих органов плуга (0,27-0,47) от сопротивления достигает 27-47% крюковой мощности. Она расходуется на трение полевых досок, т.е. уничтожается и причиняет ущерб ресурсу и почве.
На склоне боковая сила сползания требует поворота колес вверх. Это создает дополнительное сопротивление и затраты энергии машины и человека.
В горной зоне движение агрегата вдоль склона, а рабочих органов и поперек или обработка пропашных культур в двух направлениях решает проблемы точности вождения, экономичности, экологичности, технологичности и безопасности.
Преобразование боковой составляющей силы тяжести и свободы бокового сползания в сопротивление подъему, эффект замены крена и перекоса продольной оси, недопустимого и невозможного вождения по горизонтали реального склона в фактор стабилизации курса, повышение устойчивости и взаимообусловленности науки, техники и общества.
Изменение крутизны склона и буксования, сползания, увода, перекоса оси, поворота колес или равномерное сползание вниз исключает автовождение по сигналам об отклонении от продольного наклона или горизонтали склона. Изменение буксования и крутизны склона блокирует управление по сигналу о нарушении слитности проходов, т.е. все факторы управления по сигналам о крене и отклонении от горизонтали, слитности проходов исключают автовождение и всякое вождение без учета, перекоса оси, буксования и неуравновешенности боковой силы.
Разгрузка колес, бесколейное движение и диско-почво-рули или мини-террасы решают проблемы комплексно путем обеспечения независимости от других факторов, кроме слитности проходов и контрастности свойств до и после обработки. Копирование двух борозд гарантирует управление по двум параметрам (курсу и отклонению), повышение надежности управления без каких-либо датчиков, усилителей и исполнительных средств, без полевых досок, потерь энергии и ресурса.
Новая концепция развития технологий и техники заключается в преобразовании известной системы машин для земледелия различных зон в систему многорежимных реверсивных сменных рабочих органов многоцелевой машины. Ввиду того, что известная ровная вспашка и оборотные плуги имеют право- и левооборачивающие корпуса для поочередной работы и при любом рабочем проходе работают нижние корпуса, верхние совершают холостой ход и в конце участка корпуса поворачиваются вокруг горизонтальной оси на полоборота и рабочие органы меняются местами, масса и энергозатраты велики, режим работы по новому способу преобразуется поворотом рабочих органов и их секции вокруг вертикальной оси, причем угол поворота определяет режим функционирования - влияет на работу до уровня преобразования в режим другой машины, а при перемещении таких рабочих органов относительно энергоисточника преобразуется тормозной режим в ведущий. В каждом случае возможно регулирование сопротивления резерв тяговой силы, значение которой можно регулировать адекватно сопротивлению настройкой ограничителей. Перевод в тормозной режим оправдан в режиме гашения избыточной силы, например на уклоне. При уравновешивании ведущих и тормозных сил широкозахватного орудия поворачивающий момент и отклонения от курса не возникают. Это свойство легко стабилизирует движение и создает условия для управления путем использования поворачивающего момента для удержания от увода агрегата вниз по склону. Многорежимность повышает гибкость адаптивного управления в режиме полуагроробота применительно к внешним условиям. Изменения углов и сил, а также режимов создают условия для использования катков, тракторов, бульдозеров, грейдеров погрузчиков и других средств в качестве носителей рабочих органов для повторения и активизации работ при очень малой массе и нулевой нагрузке колес.
Слежение за двумя и более параметрами формирования траектории, за курсом (углом) и отклонением от базовой линии, а также за текущими их изменениями осуществляется колесами-копирами борозд путем слежения за боковыми силами и моментом от этих сил, уравновешиванием боковых и ведущих сил и поворотного момента. Это устраняет угловое и линейное отклонения без дополнительных усилителей, без запаздывания и затрат энергии и металла, т.е. очувстляет рабочие органы и колеса, повышает технологический, динамический (силовой), рулевой (кибернетический) результат, упрощает конструкцию, обслуживание и использование. Повышение технического результата путем совмещения технологических и управляющих функций очевидно из алгоритмов (фиг.14-22).
Исследования, анализ и расчет путей развития техники (тракторов, мостов, агророботов) для земледелия и других отраслей, оценка затрат металла, энергии, ущерба; требований человека, растений, почвы, а также необходимости обеспечения: доступности, всесезонности, многорежимности, широкозахватности, мобильности, технологичности, гибкости функций, саморегулируемости нагрузок, всепогодности, адаптивности к средствам дистанционного управления, защиты, при реальной работе, преобразуемость ущерба колес в пользу подтвердили целесообразность использования нетормозных режимов действия рабочих органов - преобразователей сопротивления в силу движения и управления легко компактируемого робота.
Производство и применение полуробота - заменителя более 200 типов машин - для многих отраслей создает условия для эффективного использования биоклиматического потенциала для аккумуляции биопродукции и жизнеобеспечения человечества сочетанием традиций и переворота.
Избавиться от ущерба: типажа тракторов и систем громоздких тормозных машин, разобщения целей производителей и пользователей техники, потерь энергии легче преобразованием ущерба в пользу, саморегулированием технологических, динамических и управляющих функций, совмещением их и очувствлением техники, обеспечением превосходства мирового уровня машин и технологий по энерго-, металло-, время-, ресурсо-, человеко-, водо-, воздухо-, морозо-, науко-, соломо-, снего-, слухо-, интеллекто-, свето-, тепло-, посево-, структуро-, почво-, экономико-, ландшафто-, биосбережению. Здесь морозо- или холодоспелость почвы экономит много дней (день иногда год кормит), а регулирование теплобиоспелости и использование биоклиматического потенциала многих стран для получения нескольких урожаев в год решает общечеловеческие проблемы. Это и устранение обрастания и обострения проблем, унификация техники стран рисосеяния, засушливого и горного земледелия и обработки грунтов касается глобализации и единения целей производителей и пользователей техники и продукции земледелия.
Интеграция функций ходовых систем и рабочих машин превращает тяжелый трактор в многофункциональный привод рабочих органов и в 6 раз снижает расход топлива и загрязнение воздуха.
Снижение в 10 раз скорости движения и повышение ширины захвата полезно для машин, почвы, растений и человека. Снижение скорости, числа колес, буксования, расхода топлива расширением функций рабочих органов повышает биологическую полезность машин, устраняет: ущерб от энергопыленасыщения и уплотнения полей, последствий применения тормозных рабочих органов, опасность технологических, динамических и управляющих функций.
Датчик 1 (фиг.1) в виде рычага поворота колеса 10 копирует рядок 11 винограда, ягод, плодов летом и зимой: рычаг касается рядка 11 при уводе вправо и влево, поворачивает колесо 10 в сторону устранения увода (ошибки). При уводе вправо рычаг 1 поворачивается с колесом 10 влево, при повороте влево аналогично поворачивается колесо и рычаг вправо и т.д. повторяет работу.
Копирование колесами 17, 17I борозд 21, 21I: переднего следа - борозды от предыдущего прохода и задней борозды, оставляемой для следующего прохода (фиг.2, 4) широкозахватного агрегата с рабочими органами ведущего поперечного хода, преобразует технологическую силу и сопротивление в управляющую силу копирования следа.
Рабочие органы руки 18 (фиг.2) поперечного хода содействуют повороту машины нулевым радиусом и без привода ведущих колес 22. Направляющее колесо 10 при повороте до 90° также поворачивает машину нулевым радиусом. В этом случае колесо является ведущим и переставляется вправо и влево поворотной рукой для стабилизации опорных реакций при работе на склонах и стабилизатором курса, средством поворота нулевым радиусом. Колеса 22, прицеп и ведущие и шагающие рабочие органы под действие сил торможения и толкания или тяги способствуют обороту пласта, торможению прицепа и трактора передачей этих сил рычагам управления тормозами прицепа. Во всех случаях переход от известных колес копиров к копирам борозд под действием технологических сил ведущих реверсивных рабочих органов в 10 раз снижает скорость, число борозд - базовых линий; число перекопирований борозд. Во столько же раз повышается безопасность автовождения. Преобразование всех рабочих органов в источники силы управления способствует снижению многообразия машин в единообразие роботов с учетом горных зон.
Технико-экономические показатели включают технический результат от использования новизны: устранение необходимости слежения непрерывно за колесами впереди и рабочими органами сзади, за нарушениями слитности проходов и лжедействиями, которые пропорциональны длине агрегата, зависят от механизмов поворота и знака крюковой нагрузки. Слежение за двумя точками (управление по двум координатам) устраняет зависимость от ширины и длины агрегата, крутизны склона, увода, буксования.
Переход к одной широкозахватной машине - агророботу, следящему за двумя сигналами (координатами), - преобразует многомашинные технологии в одномашинную, снижает потребность в множестве проходов и базовых линий для автовождения. Сочетание рабочих органов и колес-датчиков с ведущими рабочими органами снижает число машин, повышает многократно затраты на производство и использование.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ УПРАВЛЕНИЯ МАШИНОЙ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2006 |
|
RU2337851C2 |
| МАШИНА И СПОСОБ ЕЕ ПРИМЕНЕНИЯ | 2011 |
|
RU2474502C2 |
| АГРОМАШИНА | 2004 |
|
RU2342821C2 |
| АГРОМАШИНА И СПОСОБ ЕЕ ИСПОЛЬЗОВАНИЯ | 2003 |
|
RU2264320C2 |
| ДВИГАТЕЛЬ САМОХОДНОЙ МАШИНЫ | 2010 |
|
RU2450135C2 |
| СПОСОБ ВЫПОЛНЕНИЯ СЕЛЬСКОХОЗЯЙСТВЕННЫХ РАБОТ И АГРЕГАТ ДЛЯ ЗЕМЛЕДЕЛИЯ | 1992 |
|
RU2092001C1 |
| СПОСОБ УПРАВЛЕНИЯ АГРЕГАТОМ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1992 |
|
RU2094970C1 |
| СПОСОБ УПРАВЛЕНИЯ ПОЧВООБРАБАТЫВАЮЩИМ АГРЕГАТОМ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1992 |
|
RU2090992C1 |
| СПОСОБ ОБРАБОТКИ ЗЕМЛИ И МАШИНА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2000 |
|
RU2222129C2 |
| МАШИНА ДЛЯ ОБРАБОТКИ ПОЧВЫ | 2001 |
|
RU2232490C2 |
Изобретение относится к способам агроэкологически безопасной обработки почвы, управления, машинам и технологиям ее использования. Машина для обработки земли содержит энергетические и технологические средства и механизмы управления курсом и нагрузкой. Машина также содержит копиры двух базовых линий, рабочие органы, расположены на одной линии с направляющим колесом. При работе на склонах перекос оси машины компенсируется слежением за двумя точками или координатами. Технический результат направлен на повышение безопасности и точности вождения на склонах. 22 ил.
Машина для обработки земли, содержащая энергетические и технологические средства и механизмы управления курсом и нагрузкой, отличающаяся тем, что содержит копиры двух базовых линий, рабочие органы расположены на одной линии с направляющим колесом, при работе на склонах перекос оси машины компенсируется слежением за двумя точками или координатами.
| RU 2005110503 A, 20.10.2006 | |||
| СПОСОБ УПРАВЛЕНИЯ ПОЧВООБРАБАТЫВАЮЩИМ АГРЕГАТОМ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1992 |
|
RU2090992C1 |
| АГРОМАШИНА И СПОСОБ ЕЕ ИСПОЛЬЗОВАНИЯ | 2003 |
|
RU2264320C2 |
| СПОСОБ ОБРАБОТКИ ЗЕМЛИ И МАШИНА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2000 |
|
RU2222129C2 |
| МАШИНА ДЛЯ ОБРАБОТКИ ПОЧВЫ | 2001 |
|
RU2232490C2 |
| СПОСОБ ОБРАБОТКИ ЗЕМЛИ И МАШИНА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2001 |
|
RU2226326C2 |
| СПОСОБ ОБРАБОТКИ ЗЕМЛИ И АГРОМАШИНА | 2003 |
|
RU2265298C2 |
| Способ управления мобильным агророботом | 1986 |
|
SU1393334A1 |
| Способ управления мобильным агрегатом и устройство для его осуществления | 1988 |
|
SU1808233A1 |
| СПОСОБ УПРАВЛЕНИЯ СЕЛЬСКОХОЗЯЙСТВЕННЫМ АГРЕГАТОМ И СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1991 |
|
RU2023360C1 |
| US 2915130 A, 01.12.1959 | |||
| US 6223663 A, 01.05.2001 | |||
| RU 2004126127 A, | |||

