Изобретение относится к машиностроению, машинам, способам их применения, повышения безопасности, адаптивности к условиям работы, расширения функций и режимов давления.
Общеизвестно, тракторы, автомобили и другие машины на колесном ходу. Низкий КПД двигателя, трансмиссии, ходовой системы и механизмов управления повышает экономический и экологический ущерб. Низкая адаптивность к человеку и природе дополняется опасностью действия и/или бездействия человека и машины. Отсутствие потенциала безопасности часто приводит к авариям.
Прототипами являются машины по А.С. №1692320, 1079477, где саморегуляция скорости и отрицательная нагрузка может управлять тормозами. Машина по А.С. 1823355 использует силу инерции для управления тормозами. В машине по А.С. №1687473 скорость ограничивается сигналом спидометра, а по №2036806 силы инерции прицепа преобразуются в силы торможения.
Состояние и уровень машин и способов применения характеризуется запаздываниями и отказами действия. Поэтому они опасны при бездействии водителя и его отсутствии. Дорогостоящие дороги, отказ усилителей, запаздывание последовательно действующих элементов управления повышают их опасность. Суммирование известных элементов, дублирование-сложение масс и стоимостей ущербно, а в поле дополняется энерго-, ресурсо-, природоразрушением. Независимость усилителей от динамических факторов движения и торможения колеса - причина аварий.
Цель изобретения - повышение безопасности: защита человека, машины и природы, устранение эколого-эргономико-экономических ущербов.
Сущность изобретения заключается в том, что машина cодержит средства инициативного действия, движения и быстродействия управления и средства тестирования человека. На оси машины установлен радар. Сани или колеса соединены с грузом /контейнером/ с возможностью изменения наклона в сторону повышения устойчивости и фиксации. Машина содержит рабочие органы, выполненные с возможностью регулирования спелости почвы поливом, средство тушения пожаров, представляющее землемет, выполненный с возможностью снятия верхнего слоя почвы или прокладки борозды для подачи воды. Средство тестирования человека представляет собой датчик слежения за наклоном головы и тела, выполненный в виде «галстука», с электроконтактами, средства сложения за давлением крови, изменением дыхания, средства тестирования человека и машины, интеграции сигналов силы, скорости и состояния человека.
Способ применения (управления) - по одному сигналу борта поворачивают машину, по сигналам двух бортов останавливают. Силы инерции и тяжести преобразуют в силы управления тормозами. При отсутствии инициативы - команды водителя на движение останавливают и подают сигнал. Потенциал безопасности повышают применением упреждающих сигналов механического, звукового, светового /лучевого/ действия на исполнителей команд силами инерции и тяжести без усилителей и затрат энергии - средств запаздывания. Следят за двумя или тремя координатами машины и местности, корректируют траекторию по упреждающей информации силами инерции и тяжести или человеком. Повышают потенциал управляемости быстродействием сил инерции и тяжести, снижают число ошибок и отработок, опасность и энергозатраты. Скорость движения машины регулируют изменением числа ног и схемы их привода. При снижении нагрузки и повышении скорости число сменных ведущих ног снижают. Силы инерции и тяжести преобразуют в силы поворота, при замедлении избыточной силой поворачивают /тормозной поворот/, ноги ведущие впереди догружаются в тяговом режиме, ноги тормозные сзади догружаются при торможении силами инерции и тяжести. В горной зоне колесо-датчик используют в качестве регулятора скорости - утилизатора избыточной энергии на уклоне.
Поля, реки, озера используют в качестве безопасной дороги без дорогостоящих сооружений. Положение груза и форму саней изменяют и борта наклоняют в сторону повышения устойчивости и фиксируют. При бездействии водителя и потере инициативы включают автоторможение, останавливают и удерживают силами тяжести.
Машина следит за человеком: при потере силы, активности, рабочего состояния сама останавливается и удерживается - создает потенциал безопасности.
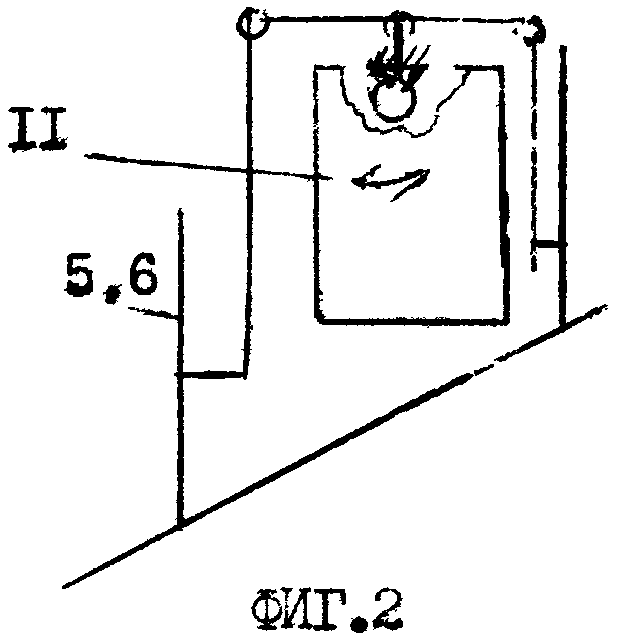
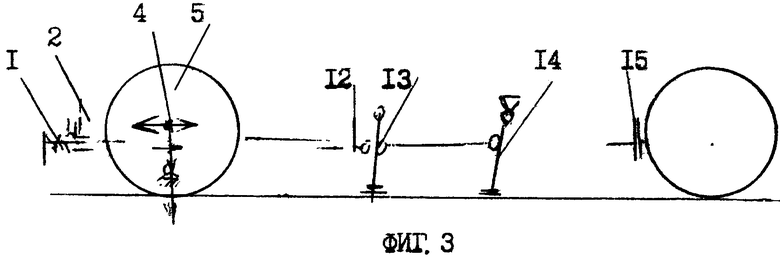
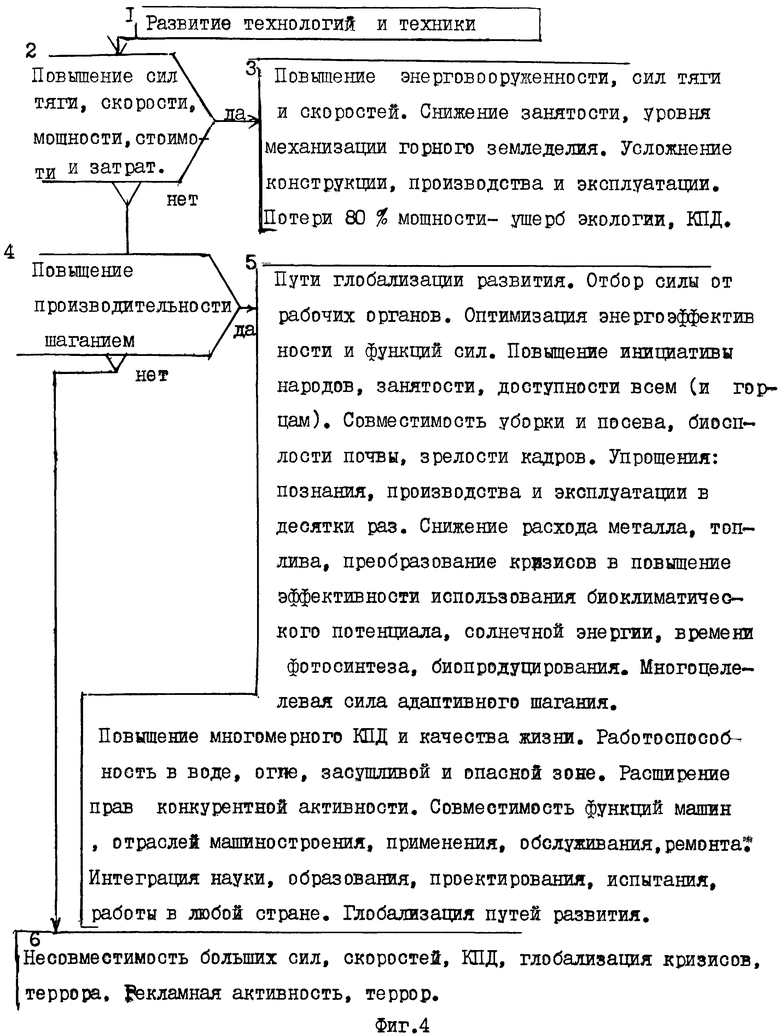
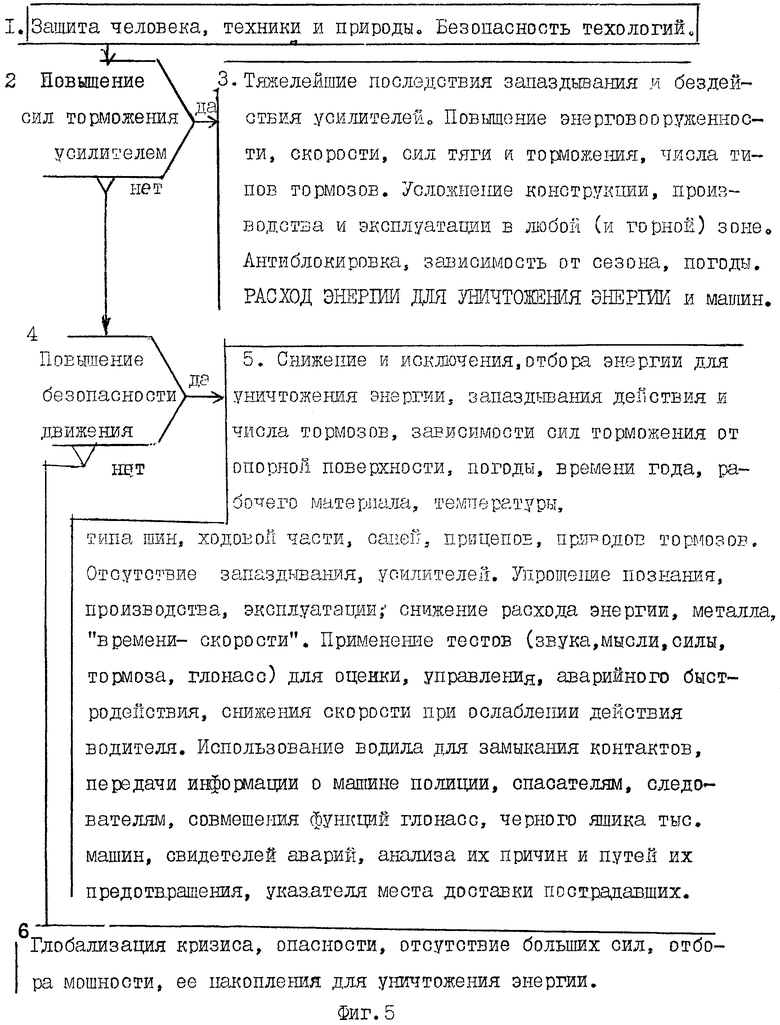
В графической части на фиг.1 изображена схема элементов машины, на фиг.2 - схема наклона и фиксации саней на склоне, на фиг.3 - схема воздействия водила - датчика тормозов на усилители и исполнители тормозов машины и прицепов без усилителей, рабочих материалов (жидкости или сжатого воздуха) и запаздывания с возможностью применения сил инерции и тяжести при замедлении, остановке и удержании силами высокого сцепления с опорной поверхностью, на фиг.4 - алгоритм развития, на фиг.5 - алгоритм защиты.
Водило - датчик 1 (фиг.1) с копирами 2, 3 бортов, рулевое 4 и направляющие 5 колеса или диски, или полозки 6 самохода 7 на воздушной подушке или поплавки, изменяемая по длине ведущая или ведомая тормозная нога 8, диски с приводом 9 для реверсивного перемещения регулятором числа ведущих ног или колес с органом 10 управления для силового действия - инициативы на движение и торможение. Вариант для работы на склонах имеет груз - маятник (фиг.2) 11 (фиг.2) для наклона борта (саней или колес), повышения потенциала устойчивости двигателя, груза и всей машины. Подвеска в виде коромыслового рычага преобразует силу тяжести в силу наклона колеса через рычаги связи.
Педаль 12 (фиг.3), тормоз-усилитель 13 и тормоз-исполнитель 14 машины и тормоз 15 прицепа соединены с возможностью быстродействия использования сил инерции и тяжести для саморегуляции силы и скорости, остановки и удержания машины. Такое действие бортов может регулировать разность скоростей и формировать траекторию. Изменение длины ног 8, дорожного просвета, глубины погружения в воду повышает адаптивность машины к условиям работы. В каждом варианте исключение утечки жидкости и сжатого воздуха повышает безопасность, а работа без запаздывания и затрат энергии на уничтожение кинетической энергии повышает КПД.
Водило 1 и рулевое управление могут поворачивать колесо 5 и ноги 8 совместно с тормозами общего и бортового действия, могут согласовать действия и формировать скорость и разность скоростей, режим работы и траектории движения, а также безопасную остановку. Рулевое 1, ножное 8, тормозное 13 управления могут действовать по сигналам, преобразовать удар в силу управления, отвода сталкивающихся машин. Ноги 8 могут шагать даже по вертикали, создавать силы для качения на колесах, работать в аварийном режиме высокого сцепления, повышать проходимость без помех работе колес при высокой скорости движения. Силовая передача передает силу двигателя ногам и колесам, рабочим органам в зависимости от настройки, шагания ногами, колесами, рабочими органами, с учетом нагрузки включает саморегуляцию нагрузки.
Датчики-источники сил и исполнители команд взаимодействуют и замещают много функций человека и машины. Шагание рабочих органов и машины под землей с возможностью повторения работ создает условия для разгребания завалов, роботизации процессов в шахтах.
Маятник-груз-контейнер, двигатель, кабина силой тяжести могут наклонять колеса или сани. Одно колесо или полозок допускает использование земли для выращивания культур: поле выполняет функции дороги. Шагание по воде, каналу повышает экополезность. Возможность выбора вариантов и режимов движения и управления допускает регулирование числа движителей и исключает циркуляцию в трансмиссии "паразитной" мощности.
При перемещении рабочих органов в заданном направлении потери энергии на управление снижаются. При перемещении органа управления назад снижается скорость, затем происходит торможение. Использование силы торможения для усиления торможения, усилители и исполнители команд действуют без запаздывания, без отказа.
Потенциал работоспособности водителя характеризуется инициативностью, действием: сжатием упругой пружины акселератора, усилием поворота руля при отключении усилителя, готовностью корректировать глонасс или иную систему ориентации. Машина без инициативы водителя замедляет ход, останавливает и удерживает силами торможения от сил инерции и тяжести, включает сигнал об отключении инициативы водителя.
Предотвратить аварию можно установкой на машине часов с настройкой на сигнал конца работы. Подача сигнала в виде устного предупреждения для остановки машины, смены или отдыха водителя восстанавливает потенциал работы человека, исключает аварии машин. Аналогично действует и при возникновении сигналов о давлении, замыкании глаз, наклоне головы, тела, потере силы инициативы /рук на движение/, потере ответа на тестовый разговор, снижении дистанции, радаром, упором, нитью, отклонении от курса, включении поворотника, спидометра, дышла управления поворотом и торможением с учетом курса.
Датчик-дышло рулевого управления и торможения автопоезда связан с колесами и тормозами, может формировать траекторию автопоезда, включает связи с рулем и тормозами от конца к началу без усилителя /компрессора, баллонов, кранов/. Тормозами прицепов можно замедлить, остановить и удержать агрегат без множества систем управления, без дублирования, усложнения конструкции и эксплуатации даже при отказе усилителя и тягача. Прицеп, колесная машина или полозки саней имеют шарнирное соединение бортов и грозовой площадки и гидроцилиндра наклона бортов и фиксатор положения грузов и бортов, мгновенное действие тормозов силой, превосходящей десять сил тяжести тормозом высочайшего сцепления с опорной поверхностью с льдом без известных усилителей, отбора энергии для уничтожения энергии.
Система антиаварийного действия человека и машины имеет варианты слежения за давлением крови и параметрами изменения дыхания применительно к конкретному водителю. Система тестирования водителя за рулем применима к всем водителям и человеку в системе машин. Отказ от известных систем отбора мощности двигателя, накопления /воздуха в баллонах/, средств воздействия человека (кранов) и исполнителей команд с запаздыванием для широкого использования энергии для уничтожения кинетической энергии хорошо компенсируется использованием сил инерции и тяжести без независимого от двигателя антиаварийного действия.
Датчик движения крови реагирует на изменение давления, подает сигнал тревоги и/или остановки при отклонении от нормы перед сном. После этого работа активизируется, давление нормализуется, авария предотвращается. При этом возможна работа машины без аварийного торможения или с остановкой в зависимости от настройки для конкретного человека. Здесь изменение давления может быть упреждающим сигналом, потенциалом безопасного действия водителя.
Закономерная связь давления и скорости - биотехнический вариант. Датчик параметров дыхания /объема, частоты…/ может быть в виде ремня натяжения /ослабления/, настраивается и при приближении сна заменяет контакты или подает сигнал тревоги, или/и торможения. Закономерная связь параметров дыхания человека и безопасности человека и машины требует настройки применительно к водителю.
Тестирование и периодический контроль заключаются в подаче вопроса /голосового сигнала/, получении ответа, или ответного действия, или торможения, являются способом замещения функций самоконтроля водителя технико-технологическим средствами. Этот вариант включает и контроль мышления, умственной активности людей в системе машин и общества.
Множество цепей управления координатами разобщены опасно, нет взаиморегуляции. Это часто приводит к авариям, после которых устанавливают причины. Причины очувствлять, совмещать и упреждающим действием устранять без датчиков, усилителей и исполнителей, путем саморегуляции создать потенциал управляемости и безопасности на основе законов и режимов взаимодействия и устранения автономизации каналов управления и контрольных приборов. Контрольные приборы могут управлять при вводе их сигнала в цепь управления. Нужно их информацию /показания/ преобразовать в действие, исключающее причину и опасность.
Информация о действиях и бездействиях, приведших к авариям, требует познания и взаимодействия, саморегуляции и взаиморегуляции, компенсации. Отсутствие регулирования потенциала саморегуляции - включение человека в множество цепей управления нужно компенсировать взаимодействием этих цепей в режиме саморегуляции, снижением числа усилителей и датчиков путем очувствления и совмещения функций компонентов настройкой режимов.
Снижение числа ошибок при реализации сигналов ГЛОНАСС изменяют сигналы координат, влияния высоты, крена снижением приемника, использованием связей, сопротивлений, силы, управлением курсом, креном, нагрузкой, микрорельефом. Бездействие одного канала управления, связанного с другим, побуждает к компенсации и саморегуляции.
Возможность повторения прорывов-переходов от ручного к конной и тракторной тяге, а сейчас к шагающим рабочим органам решает проблемы использования биоклиматического потенциала всех (И ГОРНОЙ) зон земледелия, адаптивного управления - по сигналам о динамических факторах тяги и торможения, сцепления и качения.
Снижение числа ошибок при реализации сигналов ГЛОНАСС возможно коррекцией высоты, координат, крена, использованием связей сопротивлений, силы, курса, крена. Бездействие одного канала управления требует компенсации действием другого.
Информация о действиях и бездействиях, авариях требует познания законов взаиморегуляции, замещения функций человека, снижения числа датчиков, усилителей путем очувствления и совмещения функций цепей управления и контроля множеством приборов. Совмещение и согласование работы множества каналов управления снижает число аварий, создает потенциал управляемости и безопасности. Саморегуляция многих процессов возможна использованием показаний приборов контроля, введением их сигналов в цепи управления причин аварий. Фиксация информации для расшифровки причин аварий сопряжена с опасным последействием.
Информатика, кризис, дороги связаны с природой, с наукой безопасного жизнеобеспечения, производством и госфункциями.
В любой (и горной) зоне спасти природу от пожаров, наводнений, народ от террора, экономику от кризисов можно применением конкурентоспособных путей, технологий и машин.
Дороги, транспорт, кризис, природа связаны с развитием, созиданием и разрушением. Здесь ошибки искать и исправлять можно по двум параметрам управления: текущему изменению и нормоотклонению, скорости возникновения и исправления их, знаку обратной связи, накоплению, исправлению и затратам. Потенциал саморегуляции можно повысить упрощением управления параметрами, снижением числа датчиков, усилителей, исполнителей, запаздываний их действий, числа ошибок и их отработок. Повысить потенциал безопасности и управляемости можно различными способами-вариантами: - заменой последовательности действий элементов параллельным, снижающим запаздывание; - переходом от определения функциональной зависимости между выходными и входными координатами взаимосвязанных элементов, критериев устойчивости /рауса, Гурвица, Михайлова/, передаточных функций и постоянного времени, запаздывания, не принимая равным нулю, - к применению упреждающей информации, к очувствлению и совмещению функций элементов; - использованием эффектов, признаков и явлений в различных отраслях можно сочетать и преобразовать ущерб в пользу.
Математические (координатность, устойчивость, упреждаемость, быстродействие, совместимость); эксплуатационные (копируемость линий, слитность проходов, безопасность, эффективность); физические и механические (малоэнергозатратность работы, высокая готовность); гидравлические (гибкость, работоспособность без слива жидкости); электрические (информативность, управляемость, безопасность, работизируемость); экологические, биоклиматические (эффективное использование тепла, света, влаги); интеллектуальные (глобализация пути безопасного жизнеобеспечения человечества во всех регионах); - технологические, управляющие, защитные функции можно сочетать и повысить уровень.
Интеграция диагностики, испытаний, работы, слежения за ошибками и их исправлениями также способствует развитию множества отраслей без обострения и обрастания проблем. Многокритериальность оценки и многоотраслевая значимость полезны всем.
Глобализация такого пути комплексного развития предотвращает проблемы адаптации, саморегуляции, роботизации, быстродействия.
Управляемость: чувствительность, усилительность, исполнительность, ограничиваемость обратной связью, запаздываемость - важные качества машин совершенствовать можно прорывным путем очувствления, совмещения функций, саморегуляции потенциала на основе новых законов механики, физики (малоэнергозатратной работы, упреждающей информации, интеграции сил инерции и тяжести, преобразования сопротивлений в силы тяги, поворота, подъема; снижения числа сигналов управления; энерго-, метало-, время-, ресурсозатратности…).
Совместимость операций и повторимость функций, саморегуляция, технологичность масс также упрощают механизмы управления, снижают до 30 раз число проходов но полю.
Копирование базовой линии датчиком высокой чувствительности, высокая частота работы усилителя, исполнителя и обратной связи с запаздыванием, часто выгодно преобразовать в копирование силой, составляющей часть технологического сопротивления.
Замена датчика и всей системы вождения правщиком курса - водилом и соединение руля, тормоза упреждающей работы сил инерции и тяжести при торможении и удержании.
Движущие, управляющие и защитные силы рабочих органов легко совмещаются с технологическими процессами с большой пользой для производства и эксплуатации.
Преобразования колебаний, неустойчивости, затрат энергии и их устранений в технологически более полезные действия, снижение точности изготовления и эксплуатации, повышение потенциала быстродействия и чувствительности противоречат существующим взглядам также, как новые законы физики и механики, без познания которых нельзя развивать технику и технологии.
Смещение векторов сил и сопротивлений создает поворачивающий момент. Рулевое управление управляет этим моментом, технологическими действиями, т.е. сопротивление может регулировать направление движения и нагрузку.
Адаптация и саморегуляция сил движения, поворота, подъема при шагании вдоль и поперек оси составили основы новых технологий обработки земли и других материалов, управления и использования сверхсиловой машины-террасера, очистителя и строителя дорог, машина получает из сопротивления силу для движения в нужном направлении и защиты. Такая сила регулируется, преобразуется, утилизируется, используется для сочетания функций. Она легко адаптируется к внешним условиям, пригодна для обработки спелой и влажной почв и ограничена прочностью металла.
Шагание прицепов, саней, автомобилей посредством дышла реверсивного привода и рулевого действия в режимах разгона, движения, торможения, адаптивного управления и саморегуляции делает агрегат полуроботом применительно к внешним условиям, регулятором грузоподъемности, источником развития технологий и техники высокой проходимости.
Щиток приборов перенести в зону слежения за дорогой или рабочими органами или в течение сигналов (звуки) оправдано. Лучший метод защиты от ошибок - их предотвращение. Снижение зависимости от человека, машины и местности.
Надежность человека падает до нуля при падении головы вниз - опускании подбородка или откидывании головы назад. В каждом случае положение головы включает электроконтакты цепи остановки "галстуком - датчиком" - указателем сна. Такой датчик замыкает контакты, подает сигнал о начале отключения человека и торможения машины. Сила действия головы на датчик - "галстук" достаточна для включения аварийного торможения известными способами и силами инерции и тяжести. Аналогичным сигналом может быть и задержка реакции человека, запаздывание действия машины - адаптации к местности.
Человек чувствует ошибку и вестибулярным аппаратом, как мотоциклист наклоняет сиденье - датчик и машину и фиксирует в положении высокой устойчивости против опрокидывания. Предотвращать ошибки упреждением действия против их возникновения и отработкой без запаздывания можно и нужно и путем исполнения команд без усилителей как звеньев запаздывания и нарушения устойчивости от нежелаемых передаточных функций. Галилео, глонасс, компас - системы навигации дают сигнал об ошибке (факте) там, где допуск в метрах достаточен, допустим. Предотвратить ошибку, повысить точность и слитность проходов на склоне трудно, смешать линию на ширину захвата без нарушения углового положения и слитности проходов, вести по двум координатам навигатора на склонах трудно. Слежение за маркерной линией при шагании включает накопленную ошибку, а за базовой с накоплением числа проходов с учетом ширины захвата ослабляет учет влияния рельефа местности.
Разгон тумана с дорог и аэропортов восходящим потоком горячего воздуха, охлаждение которого в верхнем слое /холодной части/, конденсатообразование приводит к дождю и повышению видимости и созданию потенциала безопасности. Установка одного реактивного двигателя /или нескольких/ в положении создания восходящего потока и дождь за счет охлаждения и конденсации потока полезны для разгона облаков. Направления потока горячих газов на гололедицу осушает дорогу и повышает безопасность. Для снижения затрат энергии можно использовать электротепловентиляторы для осушения дорог и разгона облаков.
Усилители руля, тормозов, подъемников - звенья запаздывания и расхода энергии оторваны от психологии и от других наук.
Время, сила, работа, управление, масса, торможение, потенциал безопасности, саморегуляции совмещаются с величайшей пользой применения. Время, почва, сила и масса в механике и земледелии, посев в период биоспелости или высокой влажности совместимы с уборкой. Усилители с отбором не мощности, а силы минимизируют время действия (отбора силы). Сила тяжести действует всегда и гарантирует безопасность человека, машины и местности. Оптимизация их действий определяет человека, состояние которого зависит от спирта и сна, честная и жесткая оценка недостаточна. В поле полное замещение функций человека достаточно. Потенциал надежности человека включает: частоту и чистоту дыхания от паров спирта, температуру, давление крови, активность, внимание, глубину дыхания, ее влияние на натяжение датчика-ремня, силу датчика-эспандера-руля. Изменение температуры и скорости потока воздуха, обсуждение дорожной обстановки с дублером, диспетчером дороги, предупреждение, напоминание ситуаций, рек, мостов, сел, гостиниц, времени работы и отдыха создает потенциал безопасности человека и управляемости. В тяжелых условиях и в режимах высокой проходимости активность человека возрастает, при работе и повторении работ функции человека замещаются по соображениям безопасности. Шагание катками, зубьями - корчевателями в любом направлении на минном поле или при очистке полей от камней, кратность повторения работ, слитность проходов можно контролировать по видеотелефону. Возможен режим шагания катков их сближением для взаимоторможения и качением. В каждом случае такой агрегат имеет высокую геометрическую проходимость, легко проезжает через траншеи и другие неровности.
Координатность, совместимость управления колесами и санями транспортного хода и рабочими органами при обработке земли и других материалов, возможность выбора и регулирования ширины захвата облегчает применение двух нитей бортов для подачи команды на поворот в конце гона и остановки при контакте с двумя бортовыми или одной осевой вышкой. При встрече правой нити подает команду на поворот вправо, при встрече левой нити защиты подает команду на поворот влево. В каждом случае сигнал реализуется, подавая часть выходного сигнала на вход управления обратным знаком, т.е. по следящему принципу. Эти варианты при контакте двух нитей действуют на два борта, следовательно, команда реализуется тормозами /одна вышка на оси указывает на остановку агрегата в конце гона/. При малой ширине захвата машины и водила под землей и водой нити не требуются, как для широкозахватных агрегатов на просторах полей.
При малой ширине с одним колесом может поворачиваться круто, совершать поперечное движение, копировать борозду, стенку и др. базовую линию.
Радар - указатель дистанции и скорости установлен на машине на оси поворота с возможностью получения упреждающей информации о наличии попутной и встречной машин водителю и машине для воздействия на рулевое управление и тормоза. Такое управление исключает столкновения и уход машины в кювет. При этом упреждающее воздействие на тормоз связано с изменением, поворотом и исключением действий водителя. В каждом случае активизация машин и человека устраняет сон.
Управление тормозами сигналами поворота, превышения скорости (спидометра), дистанции и скорости /радара/, направления между встречной полосой и краем дороги поворотом радара, замена усилителей силами инерции и тяжести, исключение запаздывания и ошибок очередности действия и принципа возникновения, применения дышла прицепа для преобразования сил сжатия в силы торможения задней оси с учетом поворота автоматизирует управление. Выбор вариантов, законов, режимов управления включают новые принципы распределения энергии и повышение точности управления. При аварийном торможении силы инерции и тяжести распределяют пропорционально сцеплению бортов с учетом рулевой потребности и положительной обратной связи без запаздывания и антиблокировочных средств. При утилизации энергии замедления силы торможения бортов и осей распределяют с учетом реакций, курса, очередности действия осей и действия дышла-датчика тормозов и руля. При шагании рабочих органов вдоль оси энергию между бортами распределяют с учетом сопротивлений, курса и повторения действий. При обработке ровной поверхности и движении вдоль склона с или без поперечного перемещения рабочих органов датчик глонасс опускают ниже и приближают к линии поперечного хода рабочих органов, энергию между бортами распределяют с учетом реакций, курса и параллельности линий двухкоординатного управления. Энергию между бортами на транспорте распределяют с учетом реакций, курса, числа координат управления, высоты установки датчика глонасс и крутизны склона.
Получение и применение информации о взаимодействии человека и машины для оптимизации работы повышает безопасность. Автоматическое движение вперед без отката машины назад при трогании с места на подъеме и шагании, использование сил инерции и тяжести без усилителей (насосов, компрессоров, накопителей, кранов, распределителей упрощают конструкцию и эксплуатацию, повышают безопасность.
Галстук-датчик с электроконтактами вестибулярным аппаратом реагирует на наклон головы и/или тела. При регулировании положения головы и тела сигналы исключаются. Начало сна и бездействия вестибулярного аппарата воздействует на тормоз и/или двигатель по известному принципу. Такой сигнал можно подать наклоном сиденья и упругостью связи с органом управления. При равномерном движении такой сигнал о сне достаточен для управления.
Новый принцип управления тормозами высокого сцепления включает увеличение силы давления пропорционально силе сцепления, торможения, положительная обратная связь сил защиты, инерции и тяжести, здесь силы торможения превосходят силы колес и тяжести. Такие замедления действуют после колесного торможения в аварийной ситуации.
К технико-экономическим показателям можно отнести повышение безопасности, создание потенциала безопасности человека, техники.
Тестирует человека, машину и местность и защищают без запаздывания действий, повышают безопасность человека и машины. Машина имеет средства тестирования инициативы человека, силы, команды, мышления, состояния головы, дыхания, давления крови, вождения и торможения водилом, радаром, упреждающим сигналом и при потере инициативы сменные шагающие ноги и/или рабочие органы, для обработки почвы, тушения пожаров, груз-маятник для стабилизации положения.
Счетчик моточасов, спидометр, счетчик часов работы водителя - человекочасов по настройке водителем, будильник дают сигналы для предупреждения и остановки. Настройку и учет часов работы совмещают со спидометром, дают сигнал о пройденном пути. Такой сигнал зависит от скорости и напряженности работы, т.к. после работы на высоких скоростях человек и больше утомлен. Здесь скорость-время V·t сигнал о пути и об утомлении водителя. Снижение коэффициента влияния вращающихся масс до нуля облегчает остановку машины без запаздывания.
Дорогу и человека характеризует колебание. Подпрыгивание и другие измерители плавности хода и их число указывают на напряженность работы машины и водителя. Такой сигнал также можно внести в орган управления и устного предупреждения.
Интеграция и таких сигналов о скорости, времени, ускорений-колебаний и их числа характеризует самоуничтожение машины и человека.
Управляют колесом и санями водилом - датчиком поворота и торможения. Энергию между бортами распределяют с учетом реакций, курса, числа координат управления, высоты установки датчика глонасс и крутизны склона. Дышло-датчик руля и тормозов высокого сцепления прицепов для формирования траектории автопоездов силами инерции и тяжести прицепов. Галстук-датчик с электроконтактами реагирует на наклон головы и тела перед наступлением сна и используют для торможения. Следят за давлением крови и изменением дыхания водителя, выдается сигнал остановки при отклонении от нормы конкретного водителя. Мышление водителя проверяют тестированием, и в случае отклонения от нормы подается сигнал остановки. Все сигналы можно использовать для повышения потенциала безопасности. Это повышает уровень самонастройки и адаптации.
Наука с точки зрения развития методов и средств управления быстродействия или запаздывания и эффективности имеет такие уровни системы человек, техника и природа, как:
- ручное управление с и без усилителей систем вождения, регулирования нагрузки, скорости с запаздыванием исполнения, с множеством поправок, ошибок и повторений до 10 тыс.в смену;
- применение элементов автоматики, однофункциональных действий с отбором мощности и запаздыванием и переданной функцией,
- получение и применение упреждающей информации, принципов очувствления и совмещения функций, сближения и наложения возникновений и отработок ошибок без передаточной Функции,
- двухкоординатное разноуровневое управление и согласование работы систем вождения, выравнивания реакций на склонах, регулирования сил по реакциям, слежения за слитностью проходов, упрощением производства и применения.
- технологическое управление источниками и потребителями энергии без сложных передач автономного действия, средствами саморегуляции, замены вращений масс линейной передачей, шаганием рабочих органов для работы в различных отраслях, с возможностью адаптации к условиям, перехода от КПД тяги, буксования и качения к повышению эффективности использования биоклиматического потенциала, инновации развития мировой экономики, преобразования патентов стран в патенты планеты, безопасного жизнеобеспечения человечества и производства техники из проката высокой готовности деталей. В настоящее время развитие машиностроения, земледелия, экономики, экологии, энергетики, автоуправления и т.д. комплексно решает проблемы и создания потенциала управляемости.
Подробности в алгоритмах (см. Фиг.4 и 5).
Потенциал управляемости, безопасности повышением активности человека и машины, эффективности использования технологических сопротивлений в множестве цепей управления включает повышение потенциала активности человека и машины на основе снижения их нагрузок новым путем автоматизации процессов.
Глонасс и человек требуют предупреждения сна и аварий. Ослабление сознания, расслабление мускулатуры, замедление сосудистой деятельности, снижение кровяного давления, замедление реакции на внешнее воздействие голосом, светом, ослабление зрения, слуха, запаздывание ответа на вопрос теста, задержка действий человека на органы управления (реакций), работы усилителей, исполнителей и обратных связей, передачи сигналов рабочим материалом (воздухом и жидкостью), бездействие систем управления при утечке рабочих материалов, зависимость от двигателя, времени года, внешних условий.
Повышению потенциала безопасности и управляемости, повышению активности человека и машины способствуют:
- движущие силы - части технологических сопротивлений без ограничения ширины захвата, кратности обработки, грузоподъемности, коррекция координат датчика (модема) глонасс по высоте, крену, числу координат - линии слитности проходов или келейности, дистанции вдоль и поперек в рядах и полосах движения,
выбор базовых линий и функций вождения технологических сопротивлений, защиты, сигнализации, потенциала крена, копирования линий питания, полива, различия свойств почвы до и после обработки,
- замещение функций человека водилом - датчиком руля и тормозов на транспорте или рулевые рабочие органы, тормоза замедления, остановки и удержания силами более высокого сцепления,
- работа без усилителей, запаздываний человека и машины,
- независимость работы от двигателя, внешних условий, климата,
- преобразование показаний приборов и ошибок цепей питания силами инерции и тяжести в управление без усилителей и потерь энергии и времени,
- число сигналов и ошибок, саморегуляцию курса и нагрузки колесной формулой регулируют дистанционно и достигают эффективное машино-, металло-, энерго-, ресурсо-, время-, влаго-, свето-, человеко-, грузо-, природосбережение.
Приближение водила, модема глонасс, адаптация к человеку, его силе активности, вестибулярному аппарату, датчику положения головы и тела, давлению крови (сигналу тревоги), частоте и объему дыхания, силе, активности мышления в диалоге, углу поворота радара-датчика лазерного упреждения сигналов о дистанции, скорости по спидометру и сигналу поворота повышает активность и надежность человека.
Взаиморегуляция параметров, потенциала безопасности и управляемости при пожаре и использование сигнала дышла - датчика рулевого управления, автоторможения снижает число приборов, команд, ошибок потенциалом управляемости.
Система быстросменных многофункциональных "ходулей" ног высокого сцепления высочайшей шагающей силы являются рабочими органами обработки земли под и над водой. На минном поле, в огне рабочие органы рук шагают на желаемом удалении от двигателя. Руки и ноги - приводы рабочих органов, шаг которых можно регулировать, могут сколько угодно повторять работу за один проход машины. Повторение работ полезно при уборке камней, клубней, тушении пожаров, разборке завалов, сборе материалов, выполнении землеройных и культурно-технических работ, предупреждении и устранении наводнений.
Ноги вертикального хода в режиме тряски убирают урожай плодов, укладывают в тару. В другом режиме поднимают и удерживают кабину при уборке, ремонте, очистке, строительстве, спасении людей и материалов, проведении боя, ремонте осветителей, уборке веточного корма и плодов, гашении пожаров водой и землей, устранении и предотвращении наводнений. Шагающие ноги и рабочие органы над и под землей, в шахтах облегчают разработку, вывоз руд и пород, разброс и сбор материалов, преобразуют сопротивление в силу движения в нужном направлении, торможения и удержания машины в неподвижном состоянии.
Очувствление, преобразование, совмещение и передача функций - исключение сложнейших ходовых систем и тормозных машин, опасных ошибок управления и запаздываний их действий на склонах, применение биоклиматического потенциала, величайших возможностей развития металлургии, машиностроения и многих отраслей создает условия для безопасного жизнеобеспечения человечества и решения антикризисных задач человеческой цивилизации.
Потенциал такого управления технологической силой составляет двух- и многопараметровое разноуровневое самоуправление, самозащиты, саморегуляции, самокоррекции в переделах настройки человеком и машиной. Это снижает трудности работы на склонах: увода, сползания, буксования, перекоса и "излома" оси в шарнирах соединения осей и рабочих машин, шагание рабочих органов рулевого действия вдоль и поперек оси агрегата создает условия для автоматизации.
Воздействие технологического сопротивления на множество цепей управления облегчает взаимоуправление и компенсацию отказов и неисправностей.
Две команды управления одновременно функционально равны и аналогичны команде торможения. Во всех вариантах человек может проявить инициативу - упредить сигналы внешнего воздействия. Вестибулярный аппарат человека даже при повороте помогает минимизировать влияние высоты и вертикальности. Чтобы не повышать требования к человеку после поворота в конце гона, нужно ограничить работу в режиме мотоциклиста. Это подтверждает потребность в трехкоординатном управлении. Множество вариантов управления облегчает выбор безопасного режима при отказе фундаментального принципа управления глонасс. Глонасс должен управлять тремя координатами - плоскостью машины. Она параллельна опорной плоскости, если коэффициенты при координатах пропорциональны и равны отношению свободных членов. Параллелизация плоскостей и местности и совмещение их возможно снижением свободного члена до нуля. Смещение плоскостей по координате "У" и управление по упреждающей информации для коррекции хода по координате "X" требует коррекции. Сближение машин по координатам "X, У" исключает снижение координат по вертикали в полете. Наличие помех по координатам "X, У" и в других случаях трехкоординатное управление требует сравнения с картой местности системой глонасс. В режимах поиска координат по направлению без снижения высоты, слитность проходов заменяется их совмещением в начале координаты "X", после чего снижается высота до совмещения плоскостей. Такой принцип модели исключает ошибки двух- и трехкоординатного управления и встречного столкновения подвижных координат около осевой линии дороги. Трехкоординатное управление при покачивании на дороге и изменении крена на склоне зависит от высоты машины и установки приемника сигнала глонасс. Поэтому трехкоординатное управление создает потенциал надежности управления на ровной поверхности, при малой базе.
Поворот колеса или полозка водилом можно сочетать с функциями датчика и исполнителя команд и сигналов. Эти действия можно использовать в качестве управления (команд и сигналов) для ног и колес тягача и прицепов. В каждом случае функции усилителя выполняются без запаздывания. Потенциал работы человека зависит от мышления.
Тест мышления человека включает вопросы текущего действия (дорога прямая? поворот? уклон?…) Такие вопросы привлекают внимание к дороге. Отсутствие ответа требует остановки машины. Состояние характеризует вопросы: утомлен? холодно? жарко? Вопросы требуют ответа "да, нет".
Внимание человека повышается при настройке спидометра, включении сигнала поворота, действующего на скорость в сторону снижения. Инициативная сила сжатия пружины пропорциональна скорости, сигналу радара по курсу и дистанции.
Груз - потенциал устойчивости и вестибулярный аппарат, силы инерции и тяжести - источники двойного управления и действия (исполнения) ногами высокого сцепления и управления. Регулирование числа ведущих ног изменяет скорость. Снижение числа ведущих ног повышает скорость, и наоборот, повышение числа их снижает скорость, повышает движущую силу. Тестируют человека по давлению крови, характеру дыхания. Машина тестирует человека, человек - машину и они вместе - дорогу.
Одноногий шагающий рабочий орган рулевого действия содержит упор содействия шаганию. Переднее расположение рабочего органа для технологической обработки сочетается с ногой-упором-рабочим органом финишной обработки. Это допускает выполнение множества операций за один проход путем активизации крошения комков. Сеять и поливать - регулировать биоспелость для получения раннего или двух урожаев в год.
Шагающие рабочие органы, сколько угодно повторяющие свою работу (рыхление, крошение, прочесывание) сочетают с шагающими рабочими органами финишной и одноразовой обработки. Совмещение разовых и повторных операций на земле сочетают с очувствлением и совмещением функций компонентов - снижением числа однофункциональных элементов (компонентов).
Переход от компонентного действия к действиям систем и механизмов шагания, руления, торможения, защиты, силового, позиционного, повторяющего, финишного, информационного, контрольного, тестового и т.д. действиям снижает число таких каналов, автономного управления, усилителей, их запаздываний, ошибок, отработок, энергозатрат. Это создает условия для само- и взаиморегуляции и адаптации. Поэтому возникает потенциал безопасности, управляемости и устойчивости.
Совмещение функций компонентов, повышение уровня их очувствления, установление новых связей каналов управления и машин с возможностью повышения числа операций, снижения числа типов и систем управления создает основы для сочетания и совмещения функций отраслей знания, производства и общества. Это в масштабе стран и содружеств всех зон стимулирует эффективное использование методов повышения биоклиматического потенциала для безопасного жизнеобеспечения человечества.
Дышло прицепа имеет пружину-датчик и соединение с регулятором передаточного числа и силы торможения прицепов для автоматического управления режимами в тяговом и тормозном режимах.
Очередность действия утилизаторов энергии, тормозов колес и ног высокого сцепления обеспечивает эффективность и безопасность работы. После снижения сил инерции до нуля силы тяжести машины и груза обеспечивают экономичность и безопасность.
Для тушения пожаров в лесу и высотных домах применяют руку на шарнирах для регулирования положения и направления подачи материала в огонь. Для управления рукой используют гидросистему на основе воды. На конце руки можно установить кабину для человека и оборудования для спасения и защиты и подъема машины для шагания по стенам. В положении наклона вперед рука с опорой или без нее тушит огонь на большом удалении. Такое оборудование с вращающейся или поворотной в обе стороны рукой можно поливать поля, опрыскивать. При этом ширина захвата выше длины руки с каждой стороны от линии полива или борозды. Снижение напора и удвоение ширины захвата обеспечивает экономию энергии и металла.
Землемет снимает слой земли с травой, подрезает землю, подает на полотно землемета. Работает землемет аналогично зернопульту, но изменяет направление с учетом направления ветра. Эту работу выполняет и плуг с предплужником. Поток почвы тушит пожар лучше, чем вода и оставляет борозду с или без воды. Почва и вода, борозда облегчают выход животных из огня. Эффективность пожаротушения в десятки раз выше, чем самолетом.
Машина для работы под землей имеет бур для сверления и мини-лопату для разбора завалов и погрузки материалов в тележку-контейнер. Для защиты машина имеет оболочку из двух половин. Диаметр оболочки можно изменять. Это допускает замещение функций машин /Щита/ для проходки в шахтах, при прокладке каналов гидростанций.
Отклонения можно оценить, но ввести их в управление - отработать ошибки лучше. Человек может проследить и прослушать, но техника должна замещать его функции. Борются с последствиями из-за незнания причин. Это справедливо для машины, водителя и средств их взаимоадаптации.
Возврат к производству и применению того, что опасно, свидетельствует о новой ошибке, цена которой многократно выше.
Управляют колесом и санями водилом - датчиком поворота и торможения. Энергию между бортами распределяют с учетом реакций, курса, числа координат управления, высоты установки датчика глонасс и крутизны склона. Дышло-датчик руля и тормозов высокого сцепления прицепов для формирования траектории автопоездов силами инерции и тяжести прицепов. Галстук - датчик с электроконтактами реагирует на наклон головы и тела перед наступлением сна и использует для торможения. Следят за давлением крови и изменением дыхания водителя, выдается сигнал остановки при отклонении от нормы конкретного водителя. Мышление водителя проверяют тестированием и в случае отклонения от нормы подается сигнал остановки. Все сигналы можно использовать для повышения потенциала безопасности. Это повышает уровень самонастройки и адаптации.
Счетчик моточасов, счетчик часов работы водителя - человекочасов по настройке водителем, будильник дает сигналы для предупреждения и остановки. Настройка и учет часов работы совмещают со спидометром, дают сигнал о пройденном пути.
Скорость-время V-t сигнал о пути и об утомлении водителя. Снижением коэффициента влияния вращающихся масс до нуля облегчают остановку машины без запаздывания.
Дорогу и человека характеризует колебание. Подпрыгивание, другие измерители плавности хода и их число указывают на напряженность работы машины и водителя. Такой сигнал вносят в орган управления и устного предупреждения.
Интеграция и таких сигналов о скорости, времени, ускорений колебаний и их числа характеризует самоспасение машины и человека.
Повышение безопасности, удобства, универсальности, технологичности, агротехнических качеств без повышения массы и стоимости (снижением материалоемкости и стоимости) шаганием - очевидно.
Автоматизация и адаптация шагающих технологий и рабочих органов к изменению нагрузки, формированию траектории без догрузки ведущих колес и установки дополнительных ведущих мостов и средств вождения по прямой по одной точке и в горной зоне - спасением всем.
Повышение удобства и безопасности энергетических средств, снижение запыленности, загазованности, шума, колебаний на рабочем месте и затрат на эргономическое развитие и повышает потенциал безопасности работы в горной зоне и на стенке при работе в городе.
Повышение потенциала безопасности зависит от дороги (кюветов, полос защиты, состояния поверхности); человека (инициатив, прав, знаний, чувствительности…); машины (применимости сил инерции, тяжести, толкания, торможения, саморегуляции, самоограничений, наличия связей скорости, нагрузки, мощности, крена, сигналов движения, торможения, поворота, автовождения, средств защиты); науки (защиты физической работы для здоровья человека, перевод машины в режим работы только в поле, использование потенциала нулевой физической работы управления, защиты от контакта с препятствиями, повышение шагающей силы движителей и рабочих органов при обработке почвы, технологической безопасности в различных режимах и отраслях).
Такое развитие исключает опасности человека (сна, болезней); машины (отбора и накопления энергии для уничтожения энергии и ресурса, запаздываний усилителей и опасности ходовых систем); местности (отсутствия информации, знаков, сигналов, условий защиты). Обод шины содержит наждачную крошку для повышения трения и сцепления. Перемещение колеса утилизирует энергию колебания от привода и неровностей, обеспечивает работу управления "сила-время" при малом или нулевом перемещении и деформации обода.
Многофункциональный шагающий рабочий орган содержит упор-якорь содействия шаганию в нужном направлении любой силой. Расположение рабочего органа для технологий обработки сочетается с ногой-упором-якорем рабочим органом финишной обработки. Это допускает шагание разными рабочими органами при выполнении нескольких операций за один проход. Множество функций облегчает снижение числа типов рабочих органов шагания вдоль и поперек оси. Это допускает повышение активности выполнения и повторения одной работы (крошения комков, рыхления) при однократной работе сошника, сочетать это с поливом, регулированием спелости, использованием потенциала местности и времени для получения раннего и/или дополнительного урожая кормов, овощей.
Повышение производительности, уровня механизации и роботизации и стоимости известным способом снижает занятость людей созиданием, приводит к безработице, глобализации кризиса. Это сопряжено с разобщением интересов и целей крайне дорогими затратами в различных отраслях и тяжелейшими условиями жизни в горной зоне, где мощная техника неработоспособна и экономически недопустима. Такое противоречие интересов и целей можно и нужно преобразовать в совместимость повышения производительности и занятости без повышения стоимости техники и технологий.
Снижение стоимости производства и эксплуатации техники до уровня, доступного всем и каждому, возможно, если эти проблемы решаются крайне ПРОСТО, например снижением затрат энергии в 5-6 раз, расхода металла и стоимости в десятки раз.
Несовместимость повышения производительности труда и энерговооруженности человека и занятости в их совместимость с созиданием исключает безработицу и террор. Преобразовать зло в добро (совместимость) можно и нужно использованием комплекса шагающих рабочих органов и инструментов для обработки земли и других материалов при высокой производительности техники и низкой стоимости производства, эксплуатации, ремонта и утилизации. Такая закономерность справедлива и для подготовки водителя, так как снижение числа типов машин и технологий облегчает познание, повышение квалификации и обеспечение доступности техники даже бедной части населения. Это облегчает замещение гуманитарной помощи /продуктов/ средствами их производства и получения нескольких урожаев в год. Это повышает эффективность использования биоклиматического потенциала. Потенциал продуктов и средств их производства создает условия для поиска путей дальнейшего повышения производительности труда - созидания (исключения разрушения и террора), перехода от кризисов к познанию и коррекции жизни (от зла к добру), экологическому, устойчивому, антикризисному развитию человечества - использованию природного разнообразия всех зон.
Преобразование координаты глонасс в линию (добавление координаты), замена полевых досок плугов копирами стенок борозды, линий питания и полива, снижение увода машин и буксования, потерь энергии и ресурса способствуют повышению реальной производительности и активности человека, познанию человеком критериев оценки труда не в гектарах, а в показателях качества жизни.
Возможность регулирования спелости, биоспелости в зрелости повышает продуцируемость солнечной энергии, фотосинтезом, КПД земли и тепла. Это замещает бедствия, наводнения, засухи регулированием показателей жизнеобеспечения растений, почвы, человека, созданием потенциала безопасного жизнеобеспечения.
Применительно к горной зоне такой принцип энергоэффективности облегчает регулирование климата и выбор условий и культур.
Совмещение функций энергопотоков, средств управления снижает число органов управления и ошибок, повышает динамический фактор тяги, торможения и обработки земли. Здесь снижение скорости легко компенсируется превосходством во столько раз силы, во сколько раз нужно, повышением проходимости, безопасности плавности хода, металло-, энерго-, время-, человеко-, технико-, природо-, ресурсосберегаемости. Динамический фактор аварийного торможения силой тяжести и сцепления превращается в тождество сил защиты. Очувствление, активизация человека его тестированием доступны всем и каждому, если на вопросы отвечать просто, например, твои руки устали? Тебе плохо? Ты переехал железную дорогу? Таких примеров привести можно много.
Упреждение получения и применения информации на столько, на сколько запаздывает исполнение, преобразует передаточную функцию в передаточное число. Очувствление машины на столько, на сколько совместимы функции или исключена опасность действий. Усилители усиливают и запаздывают управление. Силы инерции приводят к колоссальному разрушению машин и уничтожению людей. Такие силы замещают функции усилителей - звенья запаздывания.
Линейная электромашина допускает изменение шага полюсов, частоту тела или импульсов без изменения направления.
Пульсирующий ток одного направления смягчает характеристику, облегчает зарядку аккумуляторов, питание потребителей и сварку.
Малую скорость поршня легко можно преобразовать в большую частоту вращения вала установкой между штоками поршней и рейками шестерен малого размера. Это упрощает и валопривод. Снижение вращающихся масс, сил инерции и тяжести - опасности полезно в поле и на транспорте.
Принцип совмещения функций датчиков, усилителей, исполнителей, колес, тормозов, рабочих органов, средств защиты и использования навигационных технологий упрощает конструкцию и эксплуатацию, открывает величайшие возможности для решения проблем до их обострения и обрастания.
При поиске и отработке ошибок без множества усилителей, регуляторов - источников запаздываний, передаточных функций, критериев устойчивости преобразуют в передаточные числа или отношения, получают и используют принцип получения и применения упреждающей информации на основе совмещения функций и очувствления компонентов, изменения технологий, сроков, действий с возможностью снижения затрат энергии и времени. Это идентифицирует проблемы и решения, повышает эффективность использования биоклиматического потенциала и безопасности работы.
Переход из области регулирования скорости, сил тяги и тяжести в область (режим) защиты и управления положительной обратной связью решает комплекс проблем саморегуляции и учета кратности выполнения технологических процессов.
Модель такого управления - дифференциальные уравнения различных объектов указывает на их идентичность, на повышение порядка, линеаризацию приращений параметров, выбор условий однозначности, начала, граничности с окружающей средой (краевых задач), детерминизацию, сведение задачи к вероятностной, поиску коэффициентов взаимной корреляции и функции связей, входов и выходов. Это затрудняет поиск, входы и выходы сводятся к расходу и потере энергии, потенциала, очень дорогого регулирования.
Анализ сил и сопротивлений позволяет оценить управляемость на многих уровнях совмещения функций и минимизировать структуру.
Тест торможением телом водителя в режиме антисон реагирует на замедление наклоном вперед при потере активности /"клевками"/, выключением сознания, расслаблением мускулатуры, замедлением сердечной деятельности, дыхания, снижением кровяного давления, снижением реакции на внешнее воздействие голосом, светом, телом, наклоном вперед при торможении, ослаблением слуха характеризуют активность человека. Использование водителя и водила машины для управления и передачи информации о машине и водителе в органы остановки, спасения и следствия, совмещения функций глонасс, черного ящика тыс.машин, свидетелей аварий облегчает анализ и поиск путей предотвращения опасностей.
Бесконечное безусилительное управление силой тяжести совершает работу управления при нулевой скорости. Это дает эффект малоэнергозатратности и безопасности.
Защита человека, техники и природы, безопасность технологий зависят от сил торможения усиления усилителем расхода энергии для уничтожения кинетической энергии, числа типов тормозов и антиблокировочных средств. Такое усложнение конструкции и эксплуатации сопряжено с опасностью для человека, техники (фиг.). Повышение безопасности сопряжено со снижением отбора мощности, устранением усилителей, запаздываний их действия, упрощением производства, познания, эксплуатации.
Описание и пояснение на фигурах 4, 5 гарантирует достижение целей изобретения.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ УПРАВЛЕНИЯ МАШИНОЙ (ВАРИАНТЫ) | 2010 |
|
RU2489581C2 |
| СПОСОБ УПРАВЛЕНИЯ МАШИНОЙ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2006 |
|
RU2337851C2 |
| ДВИГАТЕЛЬ САМОХОДНОЙ МАШИНЫ | 2010 |
|
RU2450135C2 |
| МАШИНА | 2011 |
|
RU2499720C2 |
| МАШИНА (ВАРИАНТЫ) | 2009 |
|
RU2472951C2 |
| СПОСОБЫ ОБРАБОТКИ ПОЧВЫ И УПРАВЛЕНИЯ И МАШИНА ДЛЯ ИХ РЕАЛИЗАЦИИ | 2007 |
|
RU2370007C2 |
| СПОСОБ БЕЗОПАСНОГО ДВИЖЕНИЯ И МАШИНА ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2010 |
|
RU2491384C2 |
| СИСТЕМА УПРАВЛЕНИЯ АГРЕГАТОМ НА ПЕРЕСЕЧЕННОЙ МЕСТНОСТИ | 1988 |
|
RU2100219C1 |
| СПОСОБ УПРАВЛЕНИЯ И ОЦЕНКИ ПАРАМЕТРОВ МОБИЛЬНОГО АГРЕГАТА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1992 |
|
RU2090027C1 |
| УСТРОЙСТВО УПРАВЛЕНИЯ ТОРМОЗАМИ ТРАНСПОРТНОГО СРЕДСТВА С ПНЕВМАТИЧЕСКОЙ ПОДВЕСКОЙ | 1991 |
|
RU2022822C1 |
Изобретения относятся к транспортному машиностроению. Машина содержит двигатель, средства контроля и управления. Средства контроля зависят от наклона человека и машины. Машина содержит рабочие органы, обеспечивающие повышение безопасности работы в различных условиях. Способ управления машиной включает регулирование курса, скорости и наклона рамы. По одному сигналу борта поворачивают машину. По сигналам двух бортов останавливают машину. Силы инерции и тяжести преобразуют в силы управления тормозами. При отсутствии инициативы - команды водителя на движение останавливают и подают сигнал. Достигается повышение безопасности. 2 н. и 9 з.п. ф-лы, 5 ил.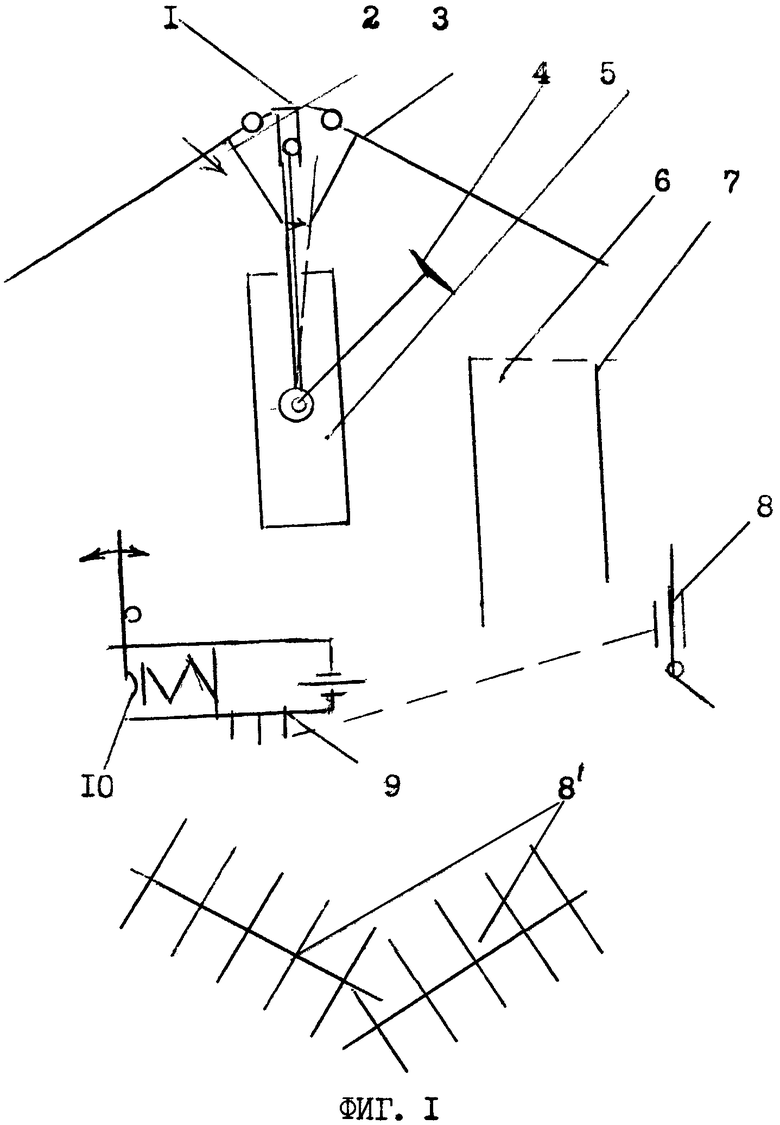
1. Машина, содержащая двигатель, средства контроля и управления, отличающаяся тем, что содержит рабочие органы, обеспечивающие повышение безопасности работы в различных условиях, а средства контроля зависят от наклона человека и машины.
2. Машина по п.1, отличающаяся тем, что она содержит радар, установленный на оси поворота машины.
3. Машина по п.1, отличающаяся тем, что средство контроля наклона машины представляет собой сани или колеса, соединенные с грузом (контейнером) с возможностью изменения наклона и фиксации положения машины в сторону повышения устойчивости.
4. Машина по п.1, отличающаяся тем, что содержит средство тушения пожаров, представляющее собой землемет, выполненный с возможностью снятия верхнего слоя почвы или прокладки борозды для подачи воды, а рабочие органы выполнены с возможностью регулирования спелости почвы поливом.
5. Машина по п.1, отличающаяся тем, что средство контроля наклона (тестирования) человека представляет собой датчик слежения за наклоном головы и тела, выполненный в виде "галстука" с электроконтактами, средства слежения за давлением крови и изменения дыхания.
6. Способ управления машиной, включающий регулирование курса, скорости, наклона рамы, отличающийся тем, что по одному сигналу борта поворачивают машину, по сигналам двух бортов останавливают машину, силы инерции и тяжести преобразуют в силы управления тормозами, при отсутствии инициативы - команды водителя на движение останавливают и подают сигнал.
7. Способ по п.6, отличающийся тем, что потенциал безопасности повышают применением упреждающих сигналов механического, звукового, светового (лучевого) действия на исполнители команд силами инерции и тяжести без усилителей и затрат энергии - средств запаздывания.
8. Способ по п.6, отличающийся тем, что скорость движения машины регулируют изменением числа ведущих рабочих органов (шагающих ног), при снижении нагрузки и повышении скорости число ведущих рабочих органов (шагающих ног) уменьшают.
9. Способ по п.6, отличающийся тем, что колесо-датчик используют в качестве регулятора скорости, положение груза используют для наклона в сторону повышения устойчивости и фиксируют.
10. Способ по п.6, отличающийся тем, что для движения могут быть использованы поля, реки и озера.
11. Способ по п.6, отличающийся тем, что при бездействии силы и мышления водителя машину останавливают и удерживают силой тяжести.
| СЕЛЬСКОХОЗЯЙСТВЕННЫЙ КОЛЕСНЫЙ ТРАКТОР | 1999 |
|
RU2162625C2 |
| SU 13682222 A1, 23.01.1988 | |||
| US 2007260385 A1, 08.11.2007 | |||
| Саморазгружающаяся баржа для бесклеточной перевозки круглого леса | 1952 |
|
SU99438A1 |
| СПОСОБ УПРАВЛЕНИЯ ПОВОРОТОМ ВОЕННОЙ ГУСЕНИЧНОЙ МАШИНЫ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1987 |
|
RU2109650C1 |
| СПОСОБ И УСТРОЙСТВО УПРАВЛЕНИЯ ЧУВСТВИТЕЛЬНОЙ К СТИЛЮ ВОЖДЕНИЯ ПОДСИСТЕМОЙ ТРАНСПОРТНОГО СРЕДСТВА | 2007 |
|
RU2398694C2 |
| CN 201587334 U, 22.09.2010. | |||

