Изобретение относится к измерительной технике и может быть использовано для определения неуравновешенности деталей.
Из наиболее близких по техническому решению и достигаемому результату является станок для балансировки роторов, содержащий основание с сейсмически закрепленным подвесом и установленным на нем вертикальным валом, с ротором, установленным в обойму, виброприводом, упруго связанным с валом, блок измерения неуравновешенности, включающий последовательно соединенные датчик неуравновешенности, усилитель, устройство формирования углового положения неуравновешенности, а также генератор опорного сигнала, связанный с виброприводом и вторым входом устройства формирования углового положения неуравновешенности (см. ав.св. СССР N 297890, кл. G 01 M 1/38, 1971). Известное решение принято за прототип.
Техническим результатом настоящего изобретения является повышение точности измерения неуравновешенности.
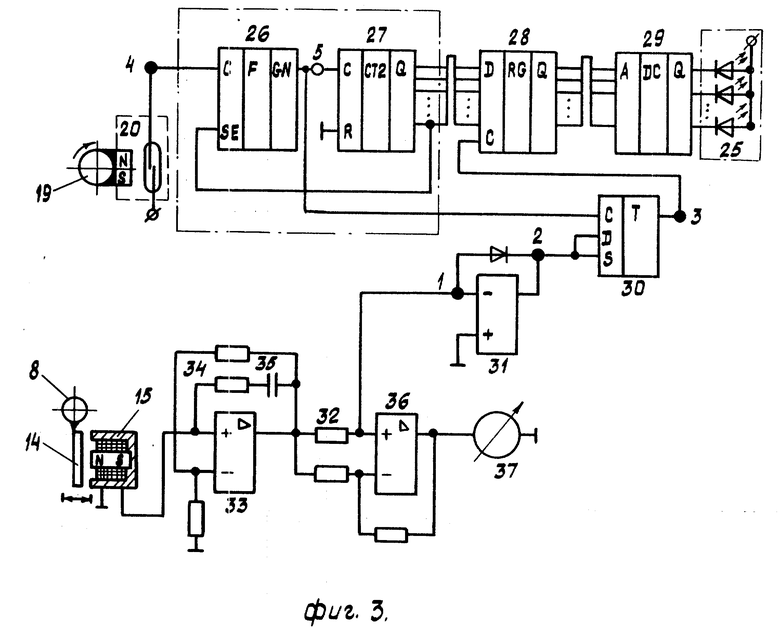
Изобретение поясняется чертежами, где на фиг. 1 представлена конструктивная схема устройства, на фиг. 2 разрез A-A, на фиг. 3 - функциональная схема блока измерения, на фиг. 4 диаграмма работы устройства.
Станок для балансировки роторов включает станину 1, подвешенный сейсмическими пружинами 2 подвес 3, на котором установлена посредством сферического подшипника 4 обойма 5, в которую вставлен, с возможностью осевого поворота на подшипниках 6, 7, вал 8 с балансирующим ротором 9.
Одновременно вал 8 связан с обоймой пружинами 10, 11, 12, 13 для исключения самопроизвольного поворота, и на валу 8 закреплен подвижный элемент 14 датчиков 15, 16, которые установлены на обойме 5. Другой конец обоймы 5 посредством второго сферического подшипника 17 соединен с регулируемым эксцентриком 18, закрепленным на валу привода 19, который установлен на подвесе 3. Регулируемый эксцентрик 18 взаимодействует с импульсным датчиком 20. Для исключения прохождения вибрации от станины к подвесу 3 последний соединен с демпферами 21, 22, а для центровки подвеса 3 введены пружины 23 и 24. По периметру ротора 9 на станине 1 размещены световые индикаторы 25.
Импульсный датчик 20 подключен к входу формирователя 26 импульсов, выполненного, например, на схеме К561ГГ1, выход которого подсоединен к счетному входу двоичного счетчика 27, а выходы его, посредством запоминающего регистра 28, соединены с адресными входами дешифратора 29, к выходам которого подключены световые индикаторы 25, указывающие угловое положение неуравновешенности ротора 9.
Вход записи запоминающего регистра 28 подключен к выходу триггера 30, управляющие входы D, S которого посредством выпрямителя 31 соединены через резистор 32 с выходом усилителя 33, в обратную связь которого включен фильтр на резисторе 34 и конденсаторе 35. Одновременно к выходу усилителя 33 подключен усилитель мощности 36, на выход которого подключен прибор 37 указателя величины неуравновешенности. Для исключения поворота обоймы 5 установлены пружины 38.
Станок для балансировки роторов работает следующим образом.
Эксцентриком 18 смещают ось обоймы 5 относительно оси вращения вала привода 19 на расстояние 0,5 1,5 мм. Устанавливают и закрепляют на валу 8 балансируемый ротор 9. Включают питание блока измерения и привод 19. Обойма 5, в которой установлен вал 8 с ротором, совершает круговое колебание относительно сферического подшипника 4. При наличии неуравновешенности ротор 9 вместе с валом 8 свершают осевые колебания, амплитуда и фаза которых пропорциональны величине и угловому положению дисбаланса. Осевые колебания вала 8 измеряются двумя дифференциально включенными датчиками 15 и 16. На выходе датчиков 15 и 16 формируется сигнал синусоидальной формы, который усиливается усилителем 33 и через усилитель мощности 36 подается на прибор 37, указывающий величину неуравновешенности. Одновременно сигнал с усилителя 33 подается на выпрямитель 31, фиксирующий момент отсчета фазы этого сигнала. Сформированным импульсом триггер 30 устанавливается в "0", разрешая запись угла неуравновешенности в запоминающий регистр 28. Код формируется путем счета количества импульсов счетчиком 27 с выхода фазоуправляемого генератора формирователя 26 с момента привода импульса с выхода датчика 20. Импульсный датчик 20 выдает импульс за один оборот вала привода 19. При этом количество генерируемых формирователем 26 импульсов устанавливается кратным в пределах одного оборота вала привода 19 и равно, например, 360o/5o 72, где 360o число градусов в окружности, а 5o точность определения углового положения неуравновешенности. Импульсом с выхода импульсного датчика 20 триггер 30 устанавливается в положение 1. В регистре 28 напоминается число импульсов в двоичном коде, пропорциональное фазовому смещению сигнала с выхода датчиков неуравновешенности 15, 16 относительно сигнала импульсного датчика 20, которое равно угловому положению неуравновешенности ротора относительно измерительной оси импульсного датчика 20, размещенного на подвесе 3. Код углового положения неуравновешенности с выхода запоминающего регистра 28 поступает на входы дешифратора 29, и он включает один из световых индикаторов 25 указателя углового положения неуравновешенности, который указывает "легкое" ("тяжелое") место на роторе 9. Таким образом однозначно определяется величина и угловое положение неуравновешенности.
Для подавления реактивных колебаний подвеса 3 от привода 19 применены демпферы 21, 22, а для исключения поворота обоймы 5 она соединена пружинами 39 с подвесом 3.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ И УСТРОЙСТВО ДЛЯ БАЛАНСИРОВКИ РОТОРА | 2004 |
|
RU2270985C1 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ БАЛАНСИРОВКИ РОТОРОВ | 2010 |
|
RU2426082C1 |
| СТАНОК ДЛЯ БАЛАНСИРОВКИ РОТОРОВ | 2005 |
|
RU2299409C1 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ АВТОМАТИЧЕСКОЙ БАЛАНСИРОВКИ РОТОРА | 2008 |
|
RU2426976C2 |
| Способ балансировки деталей вращения и устройство для его осуществления | 1984 |
|
SU1247702A1 |
| Ротационный вискозиметр | 1986 |
|
SU1326951A1 |
| Устройство для определения вектора дисбаланса | 1990 |
|
SU1755081A1 |
| Ротационный электровискозиметр | 1984 |
|
SU1276957A1 |
| ИЗМЕРИТЕЛЬНОЕ УСТРОЙСТВО ДЛЯ БАЛАНСИРОВОЧНЫХ СТАНКОВ | 1973 |
|
SU373561A1 |
| Устройство для автоматической балансировки роторов гироскопов | 1982 |
|
SU1055980A1 |


Использование: в измерительной технике и может быть использовано для определения неуравновешенности тел вращения. Сущность изобретения: устройство содержит станину с подвесом, на которой установлен вал с балансируемым ротором, привод и блок измерения, включающий последовательно соединенные датчик неуравновешенности, усилитель, устройство формирования углового положения неуравновешенности, указатель величины неуравновешенности. Вал установлен в обойму, один конец которой посредством сферического подшипника соединен с приводом, а другой ее конец посредством второго подшипника соединен с эксцентриком, который закреплен на валу. Импульсный датчик, взаимодействующий с эксцентриком, подключен к входу формирователя импульсов, выход которого подключен к счетному входу двоичного счетчика, выходы которого посредством запоминающего регистра связаны с дешифратором, к выходам которого подключены световые индикаторы указателя углового положения неуравновешенности, а вход записи запоминающего регистра подключен к выходу триггера, счетный вход его соединен с выходом формирователя импульсов, а управляющие входы подсоединены к выходу усилителя. 3 з.п. ф-лы, 4 ил.
| БАЛАНСИРОВОЧНЫЙ СТАНОК | 0 |
|
SU297890A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
