Изобретение относится к балансировочной технике и может быть использовано для определения и устранения неуравновешенности деталей вращения.
Цель изобретения - повышение точности измерения и устранения неуравновешенности путем проведения измерений за одну установку детали.
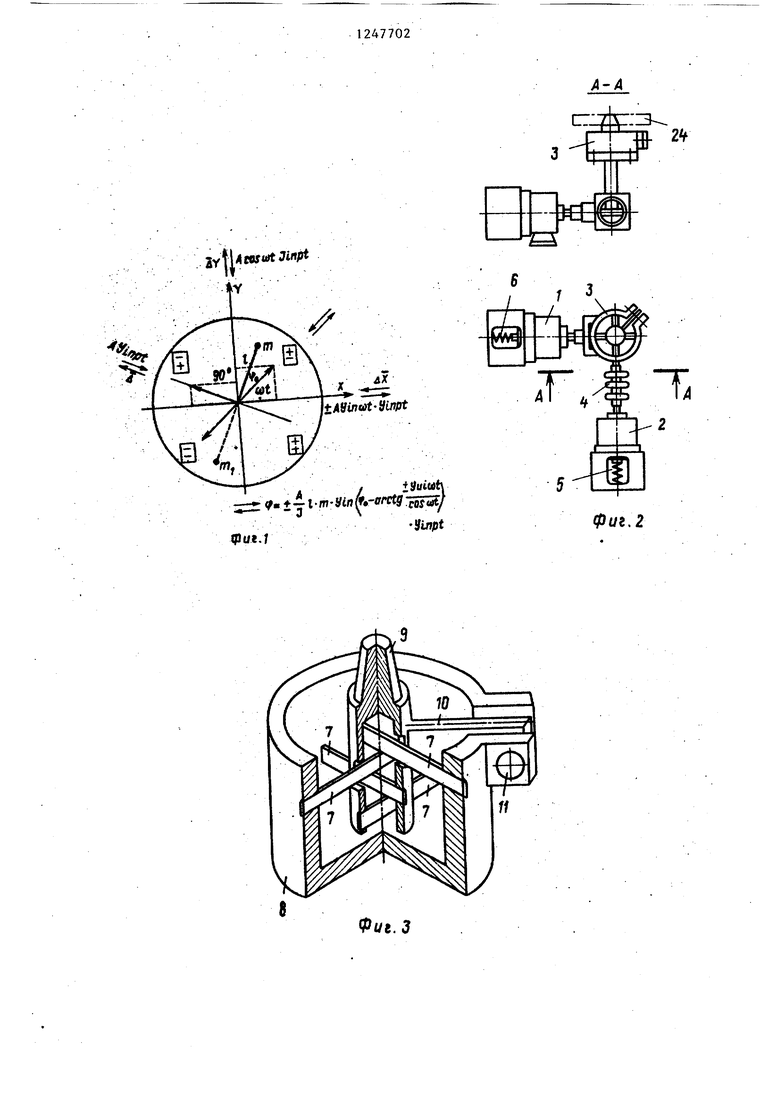
На фиг. I изображена расчетная схема, поясняющая предлагаемьш способ балансировки; на фиг. 2 - схема виброприводов; на ;фиг..3 - конструкция упругой опоры; на фиг, 4 - принципиальная схема управления устройства; на фиг. 5 - принципиальная схема блоков измерения и устранения неуравновешенности.
Устройство, реализующее способ, содержит два вибропривода на основе электродвигателей 1 и 2, один из которых подсоединен к упругой опоре 3 непосредственно, а другой - через сильфон 4. Валы электродвигателей соединены со статором через упругие , элементы 5 и 6, исключающие поворот ротора. Упругая опора 3 вьшолнена в виде перекрестных упругих элементов 7, один конец которых жестко соедине с обоймой 8, другой - с опра вкой 9, на которой закреплен подвижный элемент 10 датчика 11. Блок измерения содержит соединенные последовательно датчик 11 и избирательньй усилитель 12, выход которого соединен с входом блока 13 определения максимума. Блок управления виброприводом содержит два регулируемых источника 14 и 15 постоянного напряжения. Выход первого источника 14 соединен с управляющей обмоткой одного из электродвигателей 1 .. Блок управления виброприводами содержит также мостовой триггер 16, вход которого соединен с выходом второго регулируемого источника 15 постоянного напряжения, а выход - с управляющей обмоткой второго электродвигателя 2, нуль-орган 17, вход которого соединен с выходом мостового триггера 16, а выход - с его управляющим входом, два управляемых фазовращателя 18 и 19, выходы которых соединены с входами регулируемых источников 14 и- 15 постоянного, напряжения, блок 20 преобразования сигнала неуравновешенности, выходы которого соединены с входами управляемых фазовращателей 18 и 19, а вход - с выходом блока 13 определения максимума.
Арифметический блок 21 своими входами соединен с управляющими обмотками электродвигателей 1 и 2, а выходом - с индикатором 22 и блоком 23 устранения неуравновешенности.
Способ реализуется следующим образом.
Балансируемая деталь 24 устанавливается на оправку упругой опоры 3.
Включается питание устройства. Балансируемой детали 24 сообщаются взаимно перпендикулярные колебательные дви- .жения в плоскости, перпендикулярной оси вращения детали. На выходе регулируемых ИСТОЧНИКОВ 14 и 15 постоянного напряжения возникают напряжения
Ц f l+cosu31;
Е
г- 1Г
l+sinui.
где «jJ - частота сканирования, задаваемая блоком 20 преобразования сигнала неуравновешенности;
Е - амплитуда считающего напряжения .
Напряжение, подаваемое на управляющие обмотки электродвигателей 1 и 2 приводов, приводит к изменению амплитуды колебательных движений по закону синуса и косинуса соответственно, что в свою очередь приводит к сканированию суммарного вектора колебательной скорости с частотойcJ.
Угловые колебания детали 24, возникающие при этих движениях, регистрируются датчиком, усиливаются и фильтруются избирательным усилителем 12 и подаются на блок 13 определения максимума. При определенном направлении суммарного вектора колебательных движений угловые колебания балансируемой детали 24 достигают максимума. Этот момент определяется блоком 13 определения максимума, который подает сигнал на блок 20 преобразования сигнала неуравновешенности, который,преобразуя этот сигнал, прекращает изменение фазы напряжения и., и и . Направление колебательнь пс движений фиксируется и в этом положении производится измерение амплитуды и фазы дисбаланса. Для этого сигналы с управляющих обмоток электродвигателей 1 и 2, которые соответствуют амплитудам соответствующих колебательных движений, и сигнал с блока 13 определения максимума подаются на
3,
арифметический блок 2, где вычис- ляется амплитуда и фаза дисбаланса. Полученная информация отображается индикатором 22 и подается на блок 23 устранения неуравновешенности, который по фазе дисбаланса производит правильную установку корректирующей головки, а по амплитуде - степень ее воздействия.
С целью определения неуравновешенности во всех четырех квадрантах рлоскости уравновешивания в устройство введены мостовой триггер 16 и нуль-орган 17, которые изменяют полярность напр яжения с выхода источника 1А в момент установления исчезновения колебаний двигателя 2, что соответствует переходу вектора :колебаний из одного квадранта в следующий. Квадрант, в котором находится вектор дисбаланса, определяется по полярности напряжений с мостового триггера 16 и с блока 13 определения максимума.
Применение предлагаемых способа балансировки и устройства для его осуществления позволяет повысить точность измерения и коррекции дисбаланса таким образом, что измерение производится на максимальном сигнале
и за одну установку, что исключает дополнительные ошибки.
Формула изобретения
1 . Способ балансировки деталей вращения, заключающийся в том, что балансируемой детали сообщают колебательное движение в плоскости, перпендикулярной реи ее вращения, и измеряют амплитуду возникающих угловых олебаний относительно этой оси, о т- ичающийся тем, что, с цеью повышения точности процесса баансировки путем проведения измереий за одну установку детали, де тали сообщают дополнительное движение в
47702.
плоскости, перпендикулярной оси ее вращения в направлении, перпендикулярном основному колебательному движению, изменяют амплитуду одного из
5 движений по закону синуса, а другого - по закону косинуса, и о величине неуравновешенности детали судят по максимуму ее угловых колебаний, а об угловой координате неуравнове10 шенности - по отношению максимальных амплитуд ее угловых колебаний.
2. Устройство для балансировки деталей вращения, содержащее два вибропривода на основе электродвигате15 лей, блоки измерения и устранения неуравновешенности и блок управления виброприводами, отличающее- с я тем, что, с целью повьш1ения точности путем проведения измерений за
20 одну установку детали, оно снабжено- двумя регулируемыми источниками постоянного напряжения, выход первого из которых соединен с управляющей обмоткой одного из электродвигателей,
25 мостовым триггером, вход которого
соединен с выходом второго регулируемого источника постоянного напряжения,- а выход - с управляющей обмоткой второго электродвигателя, нуль-орга3Q ном, вход которого соединен с выходом мостового триггера, а выход - с его управляющим входом, блоком определения максимума, вход которого соединен с выходом блока измерения, арифметическим блоком, первый и второй входы которого соединены с управляющими обмотками электродвигателей, третий вход - с первым выходом блока определения максимума, а выход - с блоком устранения неуравновешенности, двумя управляемыми(фазовращателями,, выходы которых соединены с входами регулируемых источников постоянного напря- . жения, а входы - с вьгходом блока преобразования сигнала неуравновешеннос35
40
45
ти, вход которого соединен с вьрсодом блока определения максимума.
A-A
ii:qJ3p::3
T- 2
-§

| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ И УСТРОЙСТВО ДЛЯ БАЛАНСИРОВКИ РОТОРОВ | 2010 |
|
RU2426082C1 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ АВТОМАТИЧЕСКОЙ БАЛАНСИРОВКИ РОТОРА | 2008 |
|
RU2426976C2 |
| СТАНОК ДЛЯ БАЛАНСИРОВКИ РОТОРОВ | 1993 |
|
RU2105962C1 |
| Станок для балансировки деталей | 1985 |
|
SU1293506A1 |
| Устройство для статической балансировки подвижной части прибора | 1984 |
|
SU1216691A1 |
| УСТРОЙСТВО ДЛЯ БАЛАНСИРОВКИ РОТОРОВ | 2009 |
|
RU2441211C2 |
| Устройство для автоматической балансировки вращающихся деталей | 1974 |
|
SU548777A1 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ БАЛАНСИРОВКИ РОТОРА | 2004 |
|
RU2270985C1 |
| СПОСОБ БАЛАНСИРОВКИ ШЛИФОВАЛЬНОГО КРУГА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2001 |
|
RU2173629C1 |
| Балансировочный станок | 1983 |
|
SU1144015A1 |

Изобретение относится к балансировочной технике и может быть использовано для определения и устранения неуравновешенности деталей вращения . Цель изобретения - повышение точности измерения и устранение неуравновешенности за счет проведения измерений за одну установку детали. Сущность способа состоит в .том, что с помощью двух взаимно перпенди куляр- ных колебательных движений в плоскости, перпендикулярной оси вращения детали, амплитуда одного из которых меняется по закону синуса, а другого - по закону косинуса, детали со- . общают колебательное движение, направление колебаний которого непре- рьшно изменяется. Это изменение прекращается в момент достижения максимума угловых колебаний детали, по. нему судят об амплитуде дисбаланса. Фаза определяется из отношения амплитуд, составляющих вектор колебаний. 2 с.п. ф-лы, 5 ил.
2y|UeWwtJirtP
Y .
tAyinat-yiniJt
Jpui.r
,/-
(. t- l-m-Virtr - :Ш«У
yinpt
фиг, 2
ut.3
«li:, --.-.
n
Ь
Ipui-S
к taawoy I ц(П питании
Редактор С. Лисина
Составитель А. Пайикленко
Техред О.Гортвай- Корректор С. Шекмар
Заказ 4114/40 Тираж 778Подписное
ВНИИПИ Государственного комитета СССР
по делам изобретений и открытий 113035, Москва., Ж-35, Раушская наб., д. 4/5
Производственно-полиграфическое предприятие, г. Ужгород, ул. Проектная, 4
| Патент ФРГ № 1007522, кл | |||
| Устройство для усиления микрофонного тока с применением самоиндукции | 1920 |
|
SU42A1 |
