Изобретение относится к цифровым устройствам автоматики и вычислительной техники и может найти применение в системах управления, контроля, измерения, вычислительных и других системах различных отраслей техники.
Известны цифровые /конечные/ автоматы.
Конечный автомат представляет собой логический преобразователь с внутренними обратными связями с множеством входов и множеством выходов. На входы подаются входные коды, а с выходов снимаются выходные коды, управляющие объектами управления. Состояние выходов /выходного кода/ определяется состоянием входов /входного кода/, внутренним состоянием логического преобразователя и функцией выходов, задающей состояние выходов в зависимости от состояний входов и внутреннего состояния логического преобразователя.
К недостаткам такого автомата следует отнести невозможность выполнения программно-временного управления объектом управления с множеством исполнительных устройств, так как автомат предусматривает формирование каждой выходной команды только при поступлении команды на вход. Формирование последовательности выходных команд, заданной алгоритмом управления и запускаемой одной пусковой командой, автоматом не выполняется.
Известен также микропрограммный автомат Уилкса, содержащий регистр микрокоманд РМК /блок памяти/, дешифратор, матрицу внешних микрокоманд, матрицу внутренних микрокоманд, матрицу формирования кода следующей микрокоманды и регистр операций (РО). Двоичный код первой микрокоманды в таком автомате подается от регистра операций РО на дешифратор, который преобразует двоичный код в десятичный и передает его на одну из выходных шин матрицы внешних микрокоманд и далее на исполнительное устройство. При исполнении микрокоманды сигнал от исполнительного устройства поступает на матрицу внутренних микрокоманд, передающую сигнал на матрицу формирования кода следующей микрокоманды, которая формирует этот код и передает его на регистр микрокоманд РМК, запоминающий код и передающий его на дешифратор. Далее автомат выполняет следующий цикл таких же операций до полного выполнения алгоритма управления исполнительными устройствами. Матрицы позволяют переключать между собой входные и выходные шины в различных вариантах.
Недостатком такого автомата является то, что длительность команды определяется временем формирования кода следующей команды или моментом поступления информация о выполнении предыдущей команды. Эта особенность не позволяет применять автомат для управления исполнительными устройствами, имеющими различные длительности срабатывания без обратной информационной связи о выполнении команд, т.е. автомат не может выполнять функции программно-временного автомата ПВА.
Предлагаемое техническое решение, содержащее таймер и матрицу временных интервалов, а также ключевые схемы, схемы ИЛИ и схемы проверки логических условий, позволяет реализовать алгоритмы управления, содержащие различное время задержки подачи команд и различные их длительности.
Применение таймера и матрицы временных интервалов с подключением ее к матрице внешних команд и к формирователю кода следующей команды через ключевые схемы, схемы ИЛИ, соединенные со схемами проверки логических условий, в других технических решениях не обнаружено.
Сущность изобретения поясняется чертежом, где приведена схема программного автомата /на 4 разряда двоичного кода команд/.
Программный автомат содержит регистр 1 команд /блок памяти/, к выходам которого подключен дешифратор 2. К выходам дешифратора 2 подключены вертикальные входные шины матрицы 3 внешних команд. Горизонтальные выходные шины этой матрицы, которые могут быть соединены с любой из вертикальных входных ее шин, предназначены для подключения к внешним исполнительным устройствам системы управления. Матрица внешних команд переходит в матрицу 4 внутренних команд, вертикальные входные шины которой являются продолжением вертикальных входных шин матрицы 3 внешних команд. Горизонтальные выходные шины матрицы 4 внутренних команд предназначены для подключения к ним внешних датчиков контроля исполнения команд исполнительными устройствами системы управления. На матрицу 4 внутренних команд наложена матрица временных интервалов 5. Вертикальные входные шины матрицы 5 временных интервалов подключены к выходам таймера 6, к запускающему входу которого /0/ подключена шина первой команды матрицы 3 внешних команд. Горизонтальные выходные шины матрицы 4 внутренних команд подсоединены непосредственно к одному из входов формирователя 9 кодов или к одним из входов двухвходных схем проверки логических условий /срабатывания исполнительных устройств/ 7, к вторым входам которых подсоединены другие соответствующие горизонтальные шины матрицы 4 внутренних команд. Схемы 7 проверки логических условий имеют два выхода. Один из этих выходов соединен непосредственно с одним из входов формирователя 9 кодов или с одним из входов двухвходовых схем 8, к второму входу которых подключена одна из соответствующих задержке времени выходных шин матрицы 5 временных интервалов. Второй выход схемы 7 проверки логических условий подключен к одному из входов двухвходовых или многовходовых схем ИЛИ 10. Выход каждой из схем 8 также подключен к одному из входов формирователя 9 кода следующей команды непосредственно или через схемы ИЛИ 10.
Схемы 7 проверки логических условий, схемы 8, схемы ИЛИ 10 образуют логический блок автомата 7-8-10. Регистр 11 программ подключен к дешифратору 2 через схемы ИЛИ 12.
Выходы формирователя 9 кода следующей команды подключены поразрядно к входам регистра 1 команды.
Соединение входов и выходов отдельных элементов между собой определяется алгоритмом управления, реализуемым автоматом.
Число разрядов кода регистра 1 команды, регистра 11 программ, дешифратора 2, формирователя 9 кода следующих команд, а также число схем 7 проверки логических условий, число схем 8, схем ИЛИ 10 и число шин матриц также определяются алгоритмом управления. Применение матриц позволяет осуществлять различные комбинации подключений их выходных шин с входными или применять дополнительные устройства ввода кодовой информации, что дает возможность перестраивать автомат на различные алгоритмы управления.
Программный автомат работает следующим образом. По пусковому сигналу R, поданному на один из десятичных входов регистра 11 программ, формируется код первой команды, который передается через схемы ИЛИ 12 на входы дешифратора 2, преобразующего двоичный код в десятичный и передающего его на соответствующую выходную шину матрицы 3 внешних команд, которая передает команду /A1/ на первое внешнее исполнительное устройство. Одновременно от матрицы 4 внутренних команд сигнал передается непосредственно на соответствующий вход формирователя 9 кода /если это предусмотрено алгоритмом/ или на один из входов схемы /P1/ проверки логических условий 7 и запускающий вход /0/ таймера 6. Таймер начинает отсчет времени задержки второй команды. Если на второй вход /P1/ схемы 7 с входной горизонтальной шины /p1/ матрицы 4 внутренних команд придет сигнал о выполнении команды /p1 = 1/, то с выхода "+" сигнал передается непосредственно на формирователь 9 кода или на один из входов схемы 8, на второй вход которой подается сигнал с выхода /1/ таймера 6, соответствующего времени задержки следующей команды, предписанного алгоритмом управления. При совпадении сигналов через соответствующую схему ИЛИ 10 /или непосредственно/ передается сигнал на предписанный алгоритмом управления вход /2/ формирователя 9 кода следующих команд. Код следующей команды передается в параллельной или последовательной форме на регистр 1 команд, который передает его через схему ИЛИ 12 на дешифратор 2. Дешифратор 2 преобразует двоичный код в десятичный и передает сигнал на соответствующую входную вертикальную шину матрицы 3, с которой вторая команда /A2/ передается на горизонтальную шину и на второе исполнительное устройство.
Если на второй вход схемы /P1/ проверки логических условий 7 с входной горизонтальной шины /p1/ матрицы внутренних команд 4 не придет сигнал о выполнении команды /p1 = 0/ /команда не выполнена/, то с выхода "-" непосредственно на формирователь 9 кода или через соответствующую схему ИЛИ 10 передается сигнал на другой предписанный алгоритмом управления вход формирователя 9 кода следующей команды. Формируется код другой команды, который передается на регистр 1 команды. Далее работа автомата осуществляется аналогичным образом до тех пор, пока не будут поданы все команды, предписанные алгоритмом управления /A2...An/, на предусмотренные внешние исполнительные устройства.
Связь между схемами 7 проверки логических условий, схемами 8 и схемами ИЛИ 10, а также между схемами ИЛИ 10 и формирователем 9 кода следующей команды может быть выполнена в виде матриц.
Наличие матриц и таймера позволяет реализовать различные временные программы управления исполнительными устройствами путем соответствующего переключения шин матриц.
Подключение выходов схем 7 проверки логических условий к входам схем И 8, схем ИЛИ 10 и формирователя 9 кода следующей команды соответствует реализуемому автоматом алгоритму управления исполнительными устройствами.
| название | год | авторы | номер документа |
|---|---|---|---|
| СЕЛЕКТОРНЫЙ ПЕРЕКЛЮЧАТЕЛЬ ЭЛЕКТРИЧЕСКИХ ЦЕПЕЙ | 1997 |
|
RU2118044C1 |
| ТАЙМЕР | 1996 |
|
RU2103808C1 |
| ТАЙМЕР | 1996 |
|
RU2100901C1 |
| ЛИНИЯ ЗАДЕРЖКИ | 1996 |
|
RU2100900C1 |
| ЛИНИЯ ЗАДЕРЖКИ | 1996 |
|
RU2117387C1 |
| ЛИНИЯ ЗАДЕРЖКИ | 1996 |
|
RU2103813C1 |
| ФОРМИРОВАТЕЛЬ ГРУППЫ ИМПУЛЬСОВ | 1996 |
|
RU2103807C1 |
| ПЕРЕКЛЮЧАТЕЛЬ УПРАВЛЯЮЩИХ КАНАЛОВ | 1997 |
|
RU2103814C1 |
| РАСПРЕДЕЛИТЕЛЬ ИМПУЛЬСОВ ТОКА | 1996 |
|
RU2124817C1 |
| ТАЙМЕР | 1997 |
|
RU2130692C1 |
Изобретение относится к цифровым устройствам автоматики и вычислительной техники и может найти применение в системах управления, контроля, измерения, вычислительных и других системах различных отраслей техники. Устройство представляет собой программно-временной автомат, реализующий алгоритмы управления с различными временными задержками подачи команд на множество исполнительных устройств. Автомат содержит блок памяти /регистр команд/, дешифратор, матрицу внешних команд, матрицу внутренних команд, матрицу временных интервалов, таймер с множеством временных интервалов, схемы проверки логических условий и ключевые схемы, формирователь кода следующей команды и регистр программ. Наличие матриц позволяет перестраивать автомат на различные алгоритмы управления, что определяет универсальность автомата. 1 ил.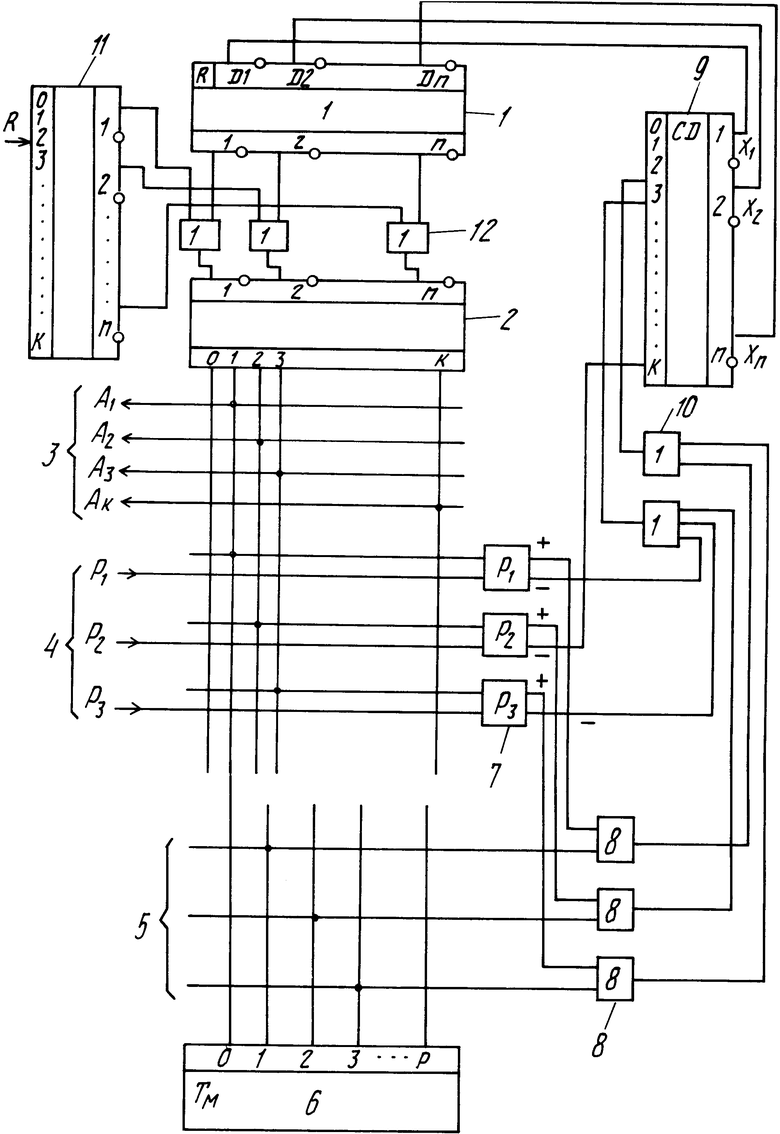
Программный автомат, содержащий регистр команд, дешифратор, матрицу внешних команд, матрицу внутренних команд, формирователь кода следующей команды и регистр программ, причем выходы регистра команд и регистра программ соединены с дешифратором, выходы которого соединены с входными шинами матрицы внешних команд, выходные шины которой предназначены для подключения к внешним исполнительным устройствам, входные шины матрицы внутренних команд соединены соответственно с входными шинами матрицы внешних команд, отличающийся тем, что в него дополнительно введены таймер с одним входом и по меньшей мере двумя выходами с различными временными задержками, матрица временных интервалов, схемы проверки логических условий, ключевые схемы и схемы ИЛИ, причем таймер своим входом подключен к первому выходу дешифратора, а выходы таймера подключены соответственно к входным шинам матрицы временных интервалов, содержащей по меньшей мере две выходные шины, каждая из которых подключена к одному из входов соответствующей ключевой схемы, число ключевых схем равно числу выходных шин матрицы временных интервалов, второй вход ключевой схемы подключен к одному из выходов соответствующей схемы проверки логических условий, число которых равно числу входных шин матрицы внутренних команд, вторые выходы одной части схем проверки логических условий подключены к части входов формирователя кода следующей команды, вторые выходы другой части схем проверки логических условий и выходы ключевых схем подключены к другой части входов формирователя кода следующей команды через схемы ИЛИ, выходы формирователя кода следующей команды подключены к входам регистра команд.
| Харазов К.И | |||
| Устройства автоматики с магнитоупраляемыми контактами | |||
| М., Энергоатомиздат, 1990, с | |||
| Ветряный много клапанный двигатель | 1921 |
|
SU220A1 |
| Харазов К.И | |||
| Цифровые программные автоматы | |||
| М., МАИ, 1995, с | |||
| Видоизменение прибора с двумя приемами для рассматривания проекционные увеличенных и удаленных от зрителя стереограмм | 1919 |
|
SU28A1 |
| Лазарев В.Г., Пийль Е.И | |||
| Синтез управляющих автоматов | |||
| М.: Энергия, 1970, с | |||
| Способ гальванического снятия позолоты с серебряных изделий без заметного изменения их формы | 1923 |
|
SU12A1 |
