Изобретение относится к области медицинской техники, а именно к хирургическим сшивающим аппаратам.
Известен аппарат для сшивания органов с толстыми стенками, содержащий корпус, магазин в виде полой иглы с направляющей, толкатель и приспособление для выведения иглы.
Недостатком этого устройства является то, что его конструкция не предусматривает предварительного сжатия ткани, а шьющий элемент вводится с помощью иглы, которая излишне травмирует ткани.
Целью изобретения является снижение травмируемости органа, а также механизация процесса наложения обвивного шва и расширение функциональных возможностей аппарата.
Данная цель достигается тем, что аппарат имеет сжимающие губки с механизмом сведения, имеющие неполные винтообразные направляющие канавки, причем аппарат снабжен как минимум одним шьющим элементом, выполненным в виде металлической цилиндрической винтовой пружины, расположенной с механизмом прошивания в как минимум одной винтовой канавке, нарезанной в отверстии корпуса, еще тем, что аппарат снабжен ручным или автоматическим механизмом деформации винтового шьющего элемента, еще тем, что ручной механизм деформации винтового шьющего элемента выполнен в виде установленной на механизме сведения губок с возможностью качания рукоятки привода, подпружиненного к ней клина с возможностью продольного перемещения и деформирующей пластины, подпружиненной к клину, установленных в корпусе аппарата, еще тем, что аппарат снабжен автоматическим механизмом деформации винтового шьющего элемента, связанным с механизмом прошивания и выполненным в виде установленной на корпусе с возможностью качания собачки с передней и задней косыми площадками с возможностью взаимодействия с винтом механизма прошивания при его продольном перемещении и установленных в корпусе клина с вилкообразным хвостовиком, связанным с механизмом прошивания, деформирующей пластины, подпружиненной к клину.
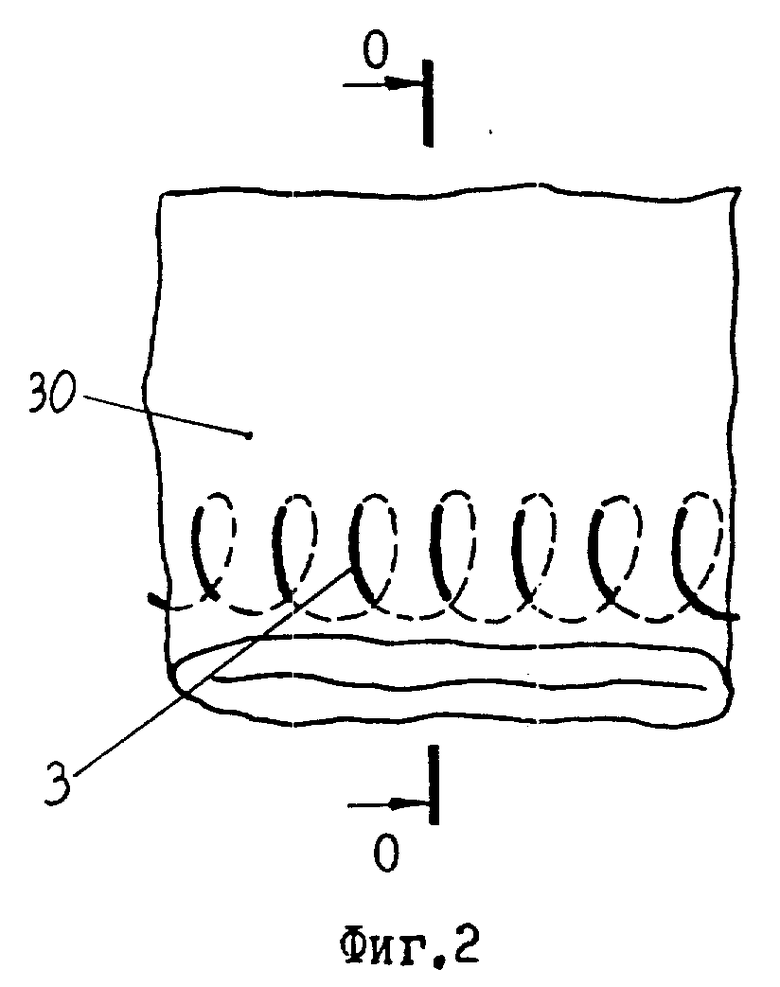
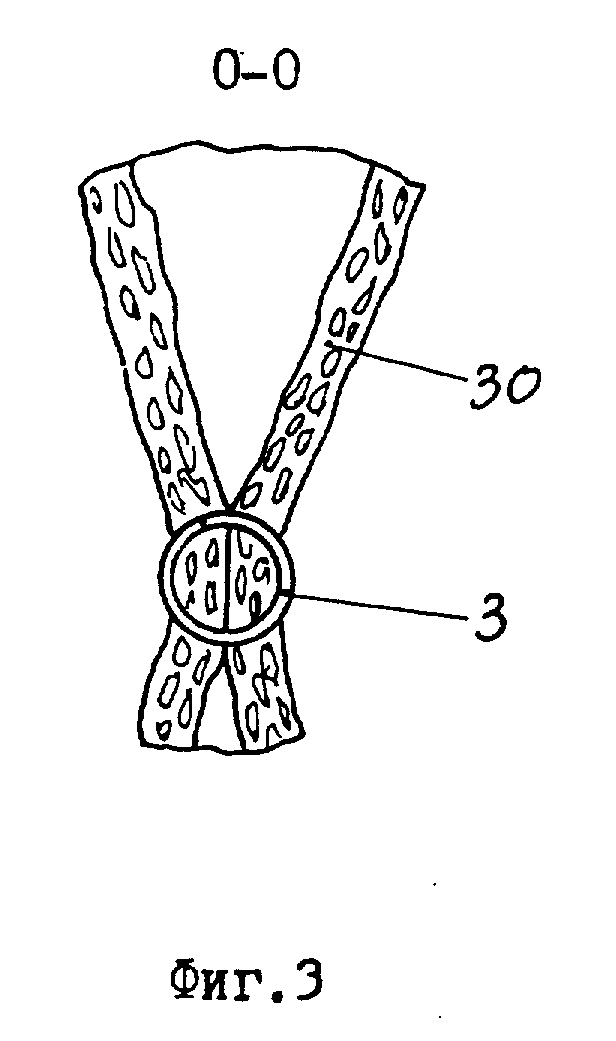
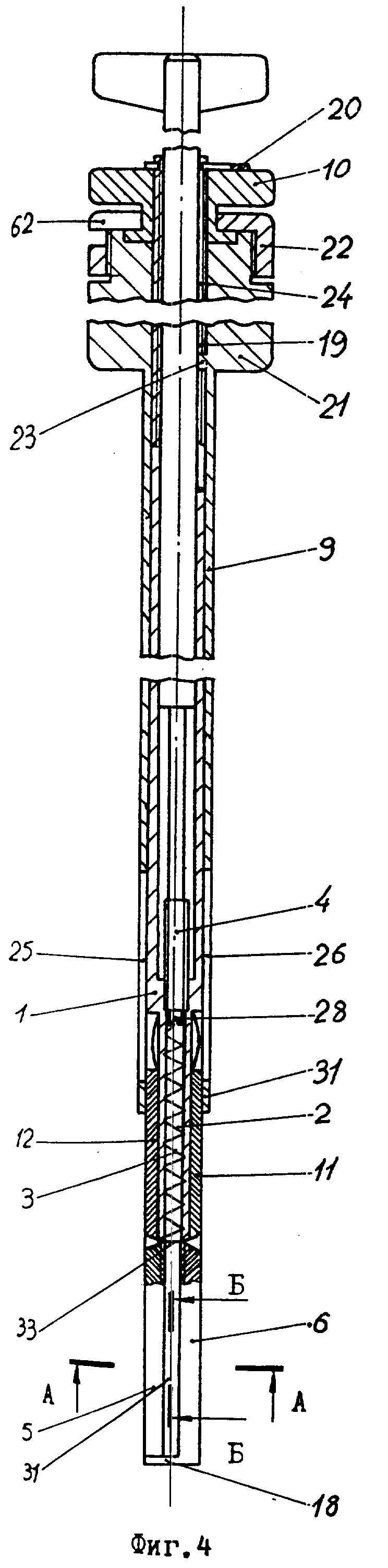
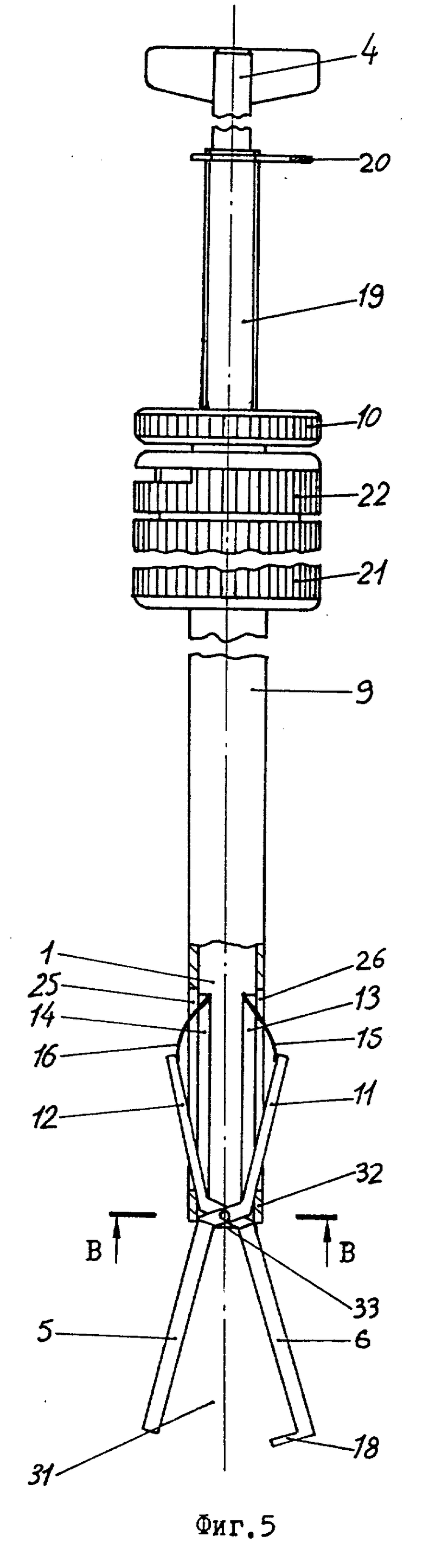
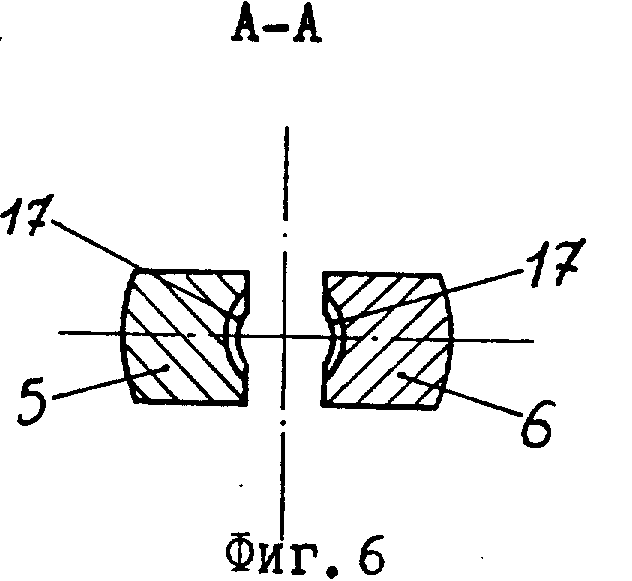
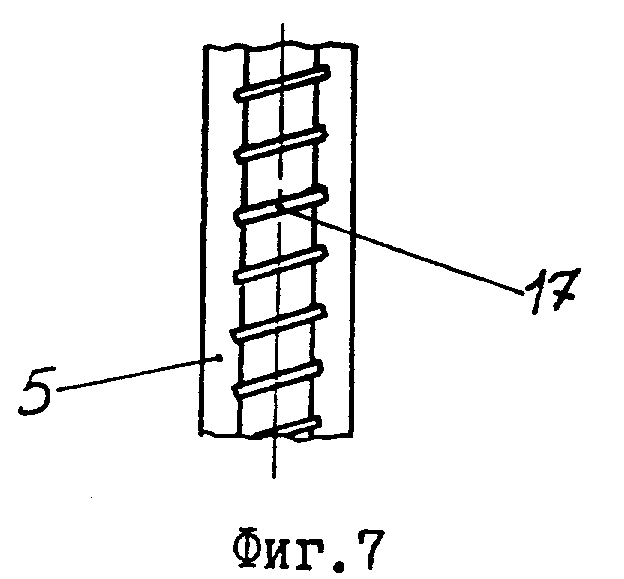
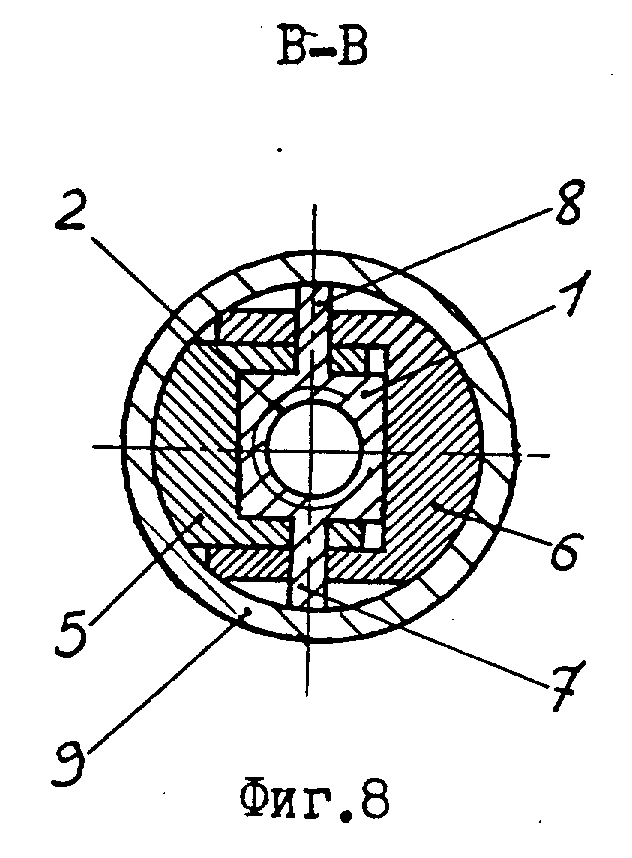
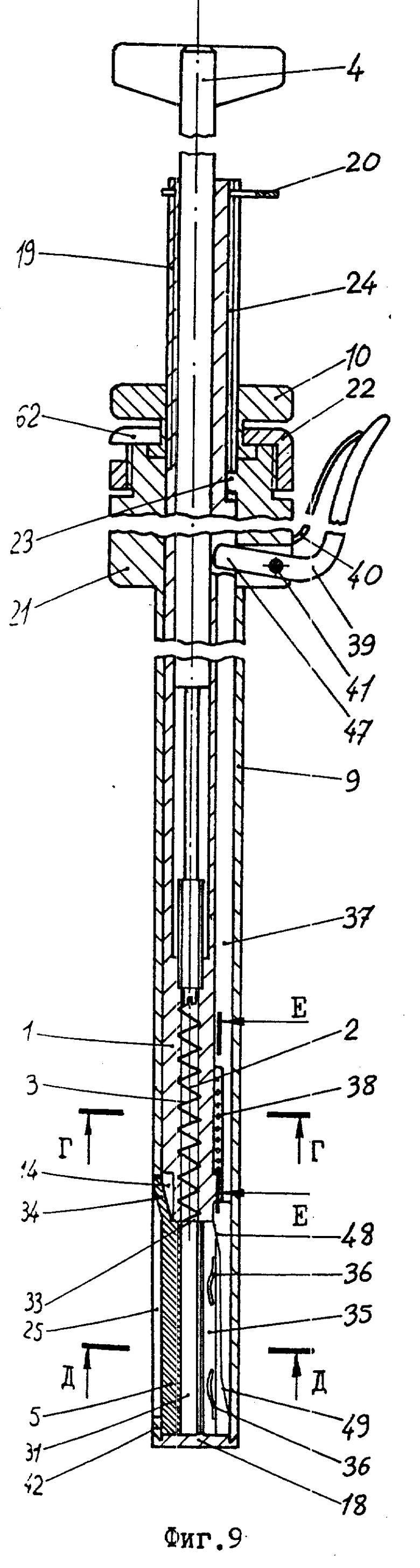
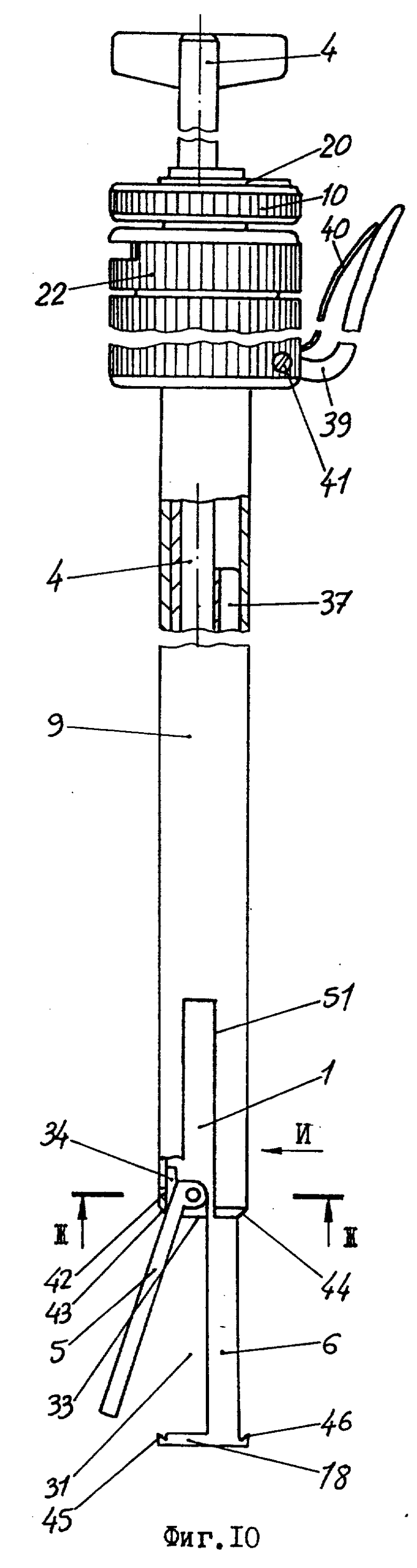
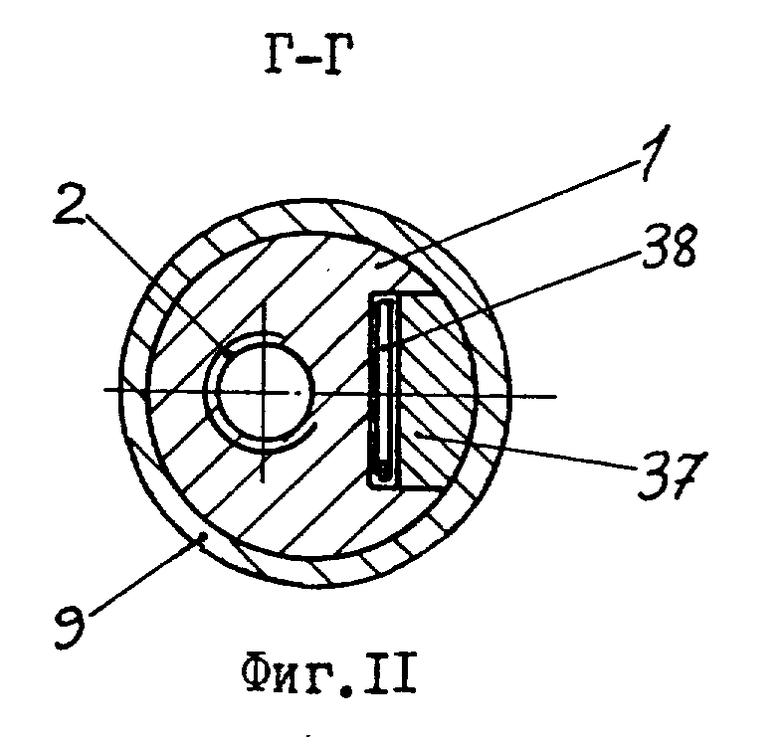
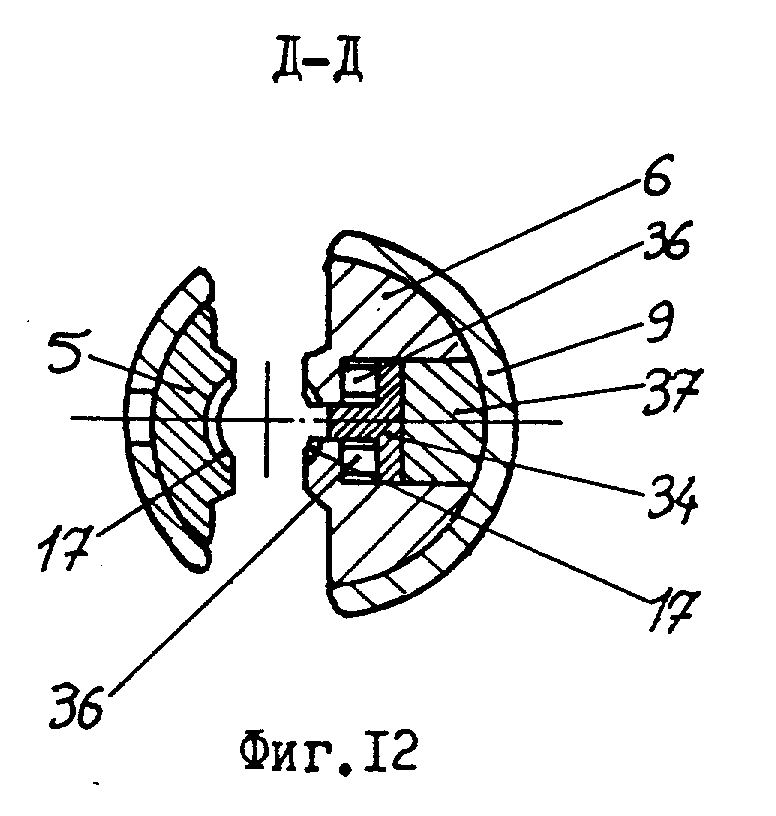
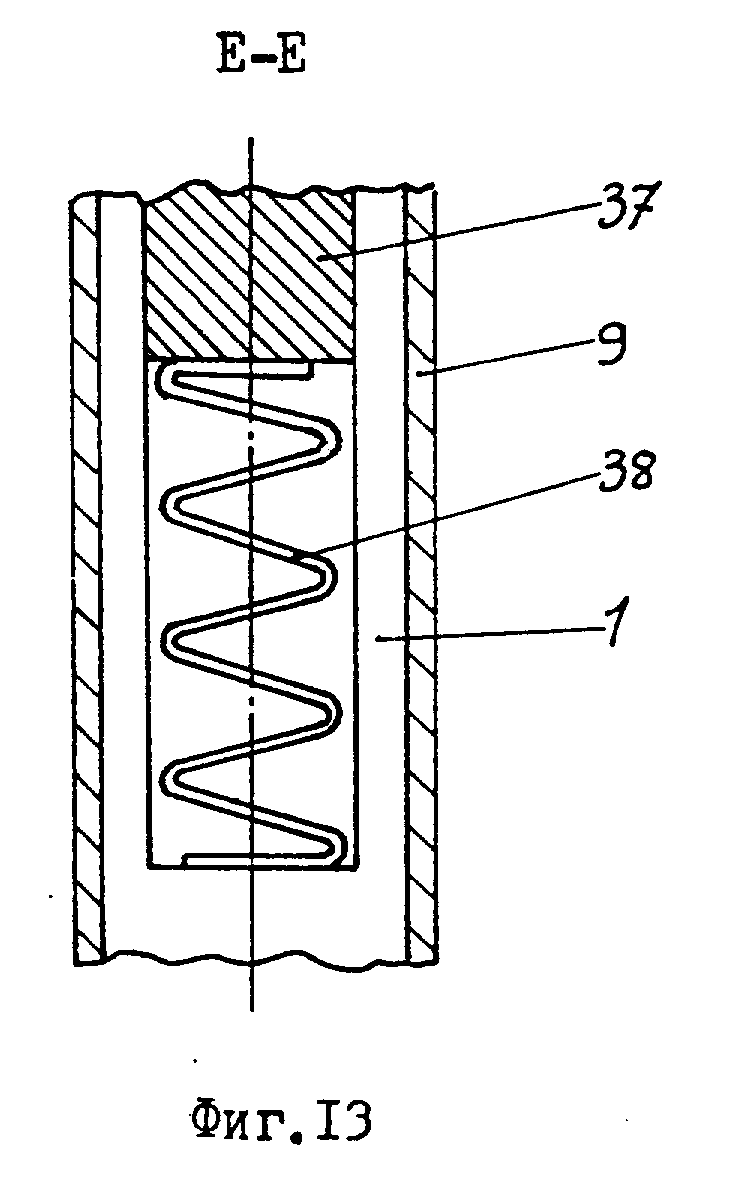
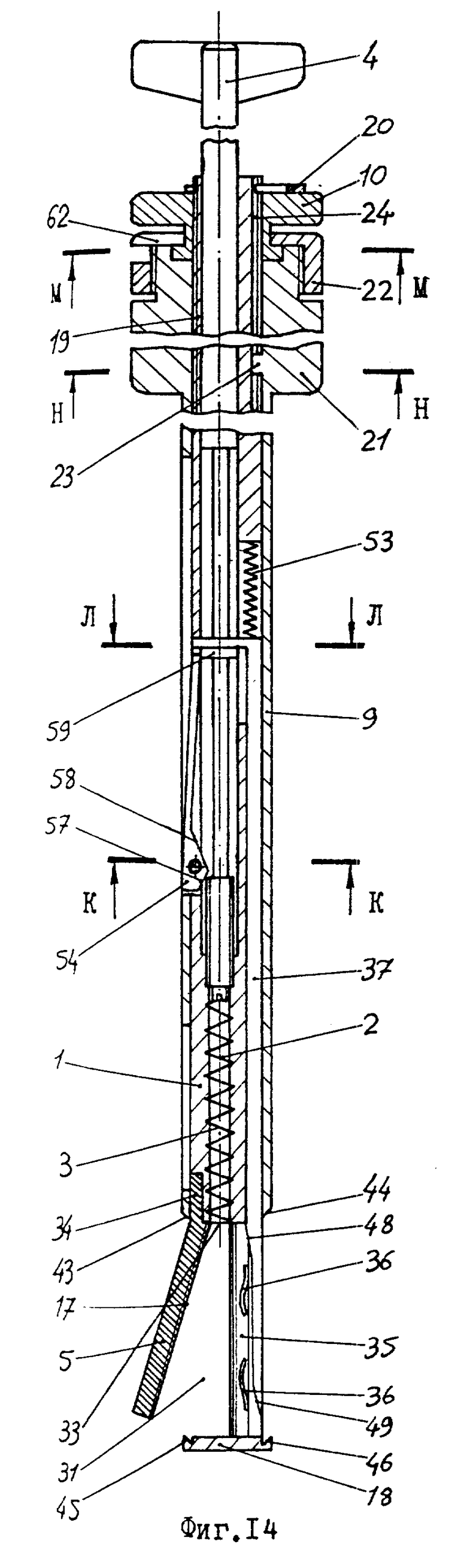
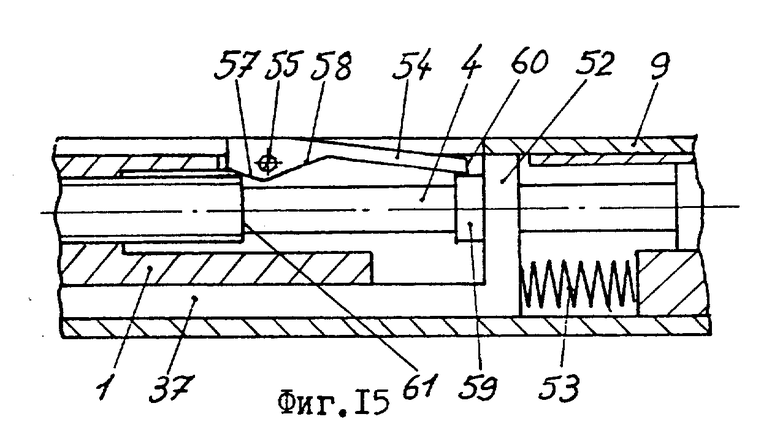
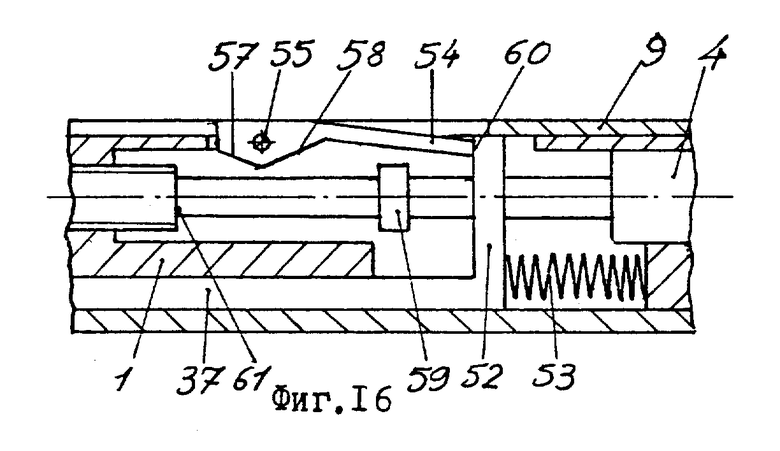
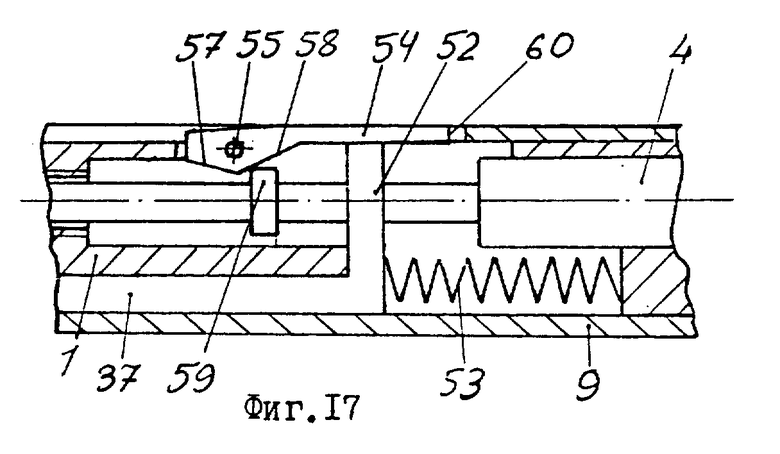
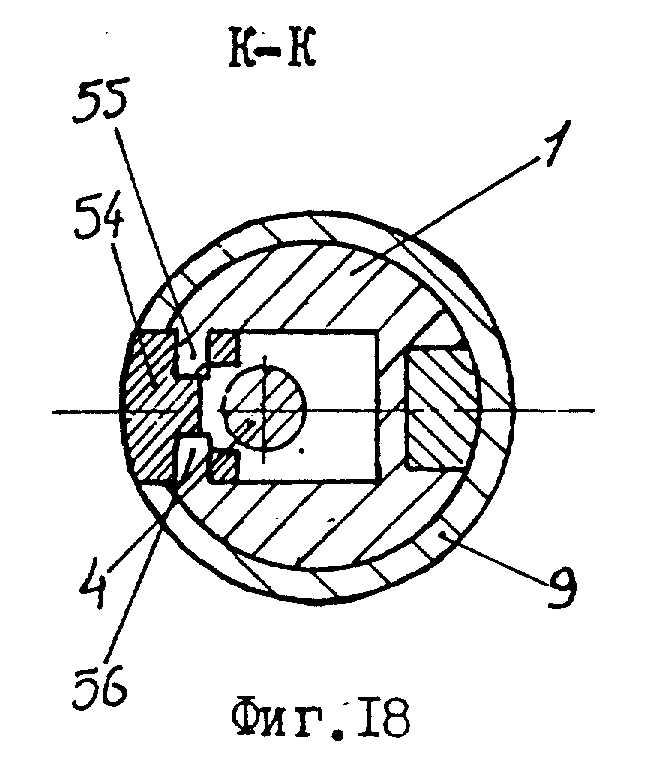
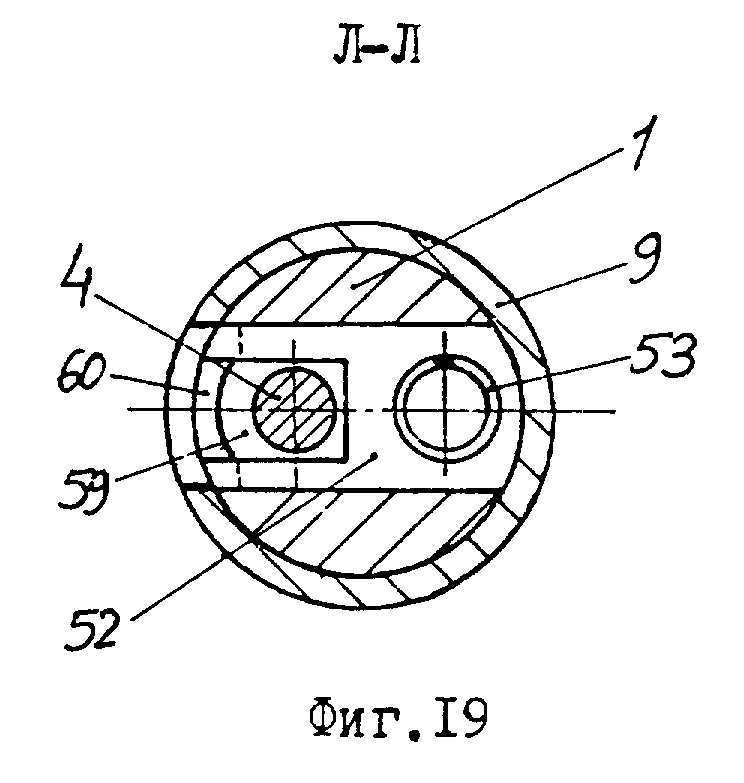
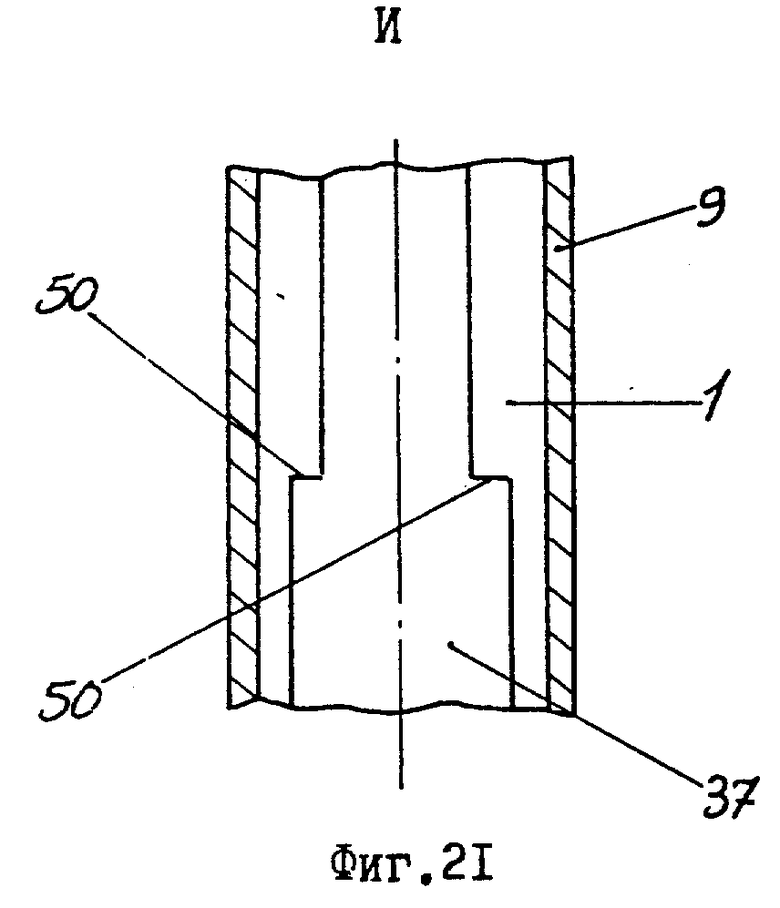
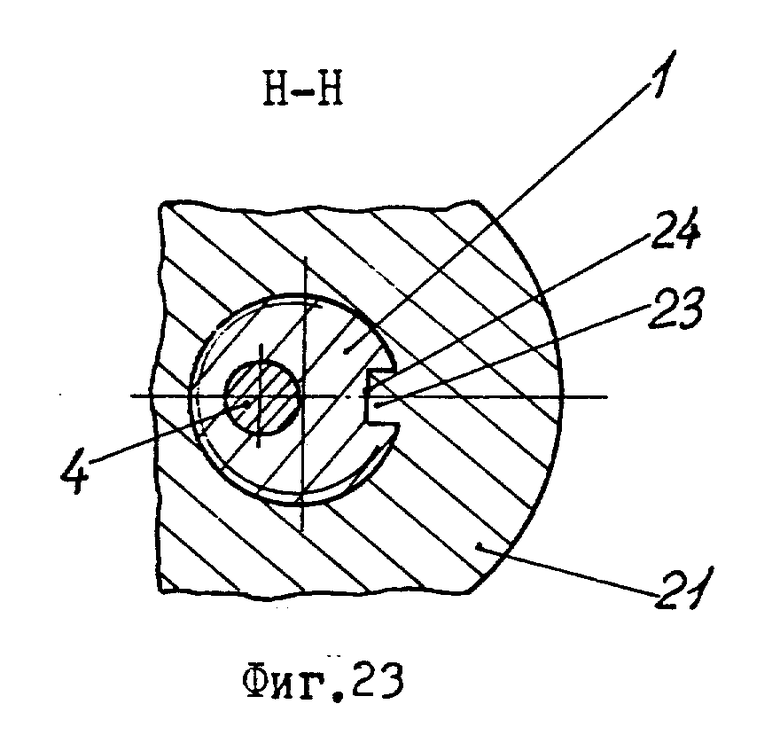
На фиг. 1 изображена схема работы шьющего механизма; на фиг. 2 - расположение шьющего элемента в биологической ткани (вид в плане); на фиг. 3 - разрез O-O на фиг. 2; на фиг. 4 изображен аппарат для наложения механического обвивного шва в закрытом состоянии; на фиг. 5 - аппарат в раскрытом состоянии; на фиг. 6 - разрез А-А на фиг. 4; на фиг. 7 - разрез Б-Б на фиг. 4; на фиг. 8 - разрез В-В на фиг. 5; на фиг. 9 изображен аппарат для наложения механического обвивного шва с ручной деформацией шьющего элемента в закрытом состоянии; на фиг. 10 - аппарат в раскрытом состоянии; на фиг. 11 - разрез Г-Г на фиг. 9; на фиг. 12 - разрез Д-Д на фиг. 9; на фиг. 13 - разрез Е-Е на фиг. 9; на фиг. 14 изображен аппарат для наложения механического обвивного шва с автоматическим механизмом деформации шьющего элемента в раскрытом состоянии; на фиг. 15 - состояние механизма автоматической деформации шьющего элемента перед прошиванием; на фиг. 16 - состояние механизма автоматической деформации шьющего элемента в начале прошивания; на фиг. 17 - состояние механизма автоматической деформации шьющего элемента в конце прошивания; на фиг. 18 - разрез К-К на фиг. 14; на фиг. 19 - разрез Л-Л на фиг. 14; на фиг. 20 - разрез Ж-Ж на фиг. 10; на фиг. 21 - вид И на фиг. 10; на фиг. 22 - размрез М-М на фиг. 14; на фиг. 23 - разрез Н-Н на фиг. 14.
Аппарат для наложения механического обвивного шва содержит корпус 1 в виде трубки, в котором выполнена винтовая канавка 2, в которой располагается винтовой шьющий элемент 3, выполненный в виде металлической цилиндрической пружины, и механизм прошивания в виде винта 4, две сжимающие губки 5 и 6, шарнирно укрепленные на корпусе 1 осями 7 и 8, и механизм их сведения 9 в виде трубки с гайкой 10.
Сжимающие губки 5 и 6 имеют хвостовики 11 и 12, входящие в пазы 13 и 14 корпуса 1 и подпружиненные пластинчатыми пружинами 15 и 16, а также неполные винтообразные направляющие канавки 17, являющиеся продолжением винтовой канавки 2 и направляющими винтового шьющего элемента 3. Винтовые параметры винта 4, винтового шьющего элемента 3, винтовой канавки 2 корпуса 1 и неполных винтообразных направляющих канавок 17 сжимающих губок 5 и 6 одинаковы. Сжимающая губка 6 имеет ограничитель ткани 18. Корпус 1 имеет на своем заднем участке резьбу 19, с которой связана гайка 10 механизма сведения 9. Также на трубчатом корпусе закреплена стопорная шайба 20 для ограничения хода механизма сведения 9 и для разборки аппарата.
Механизм сведения 9 выполнен с цилиндрической рукояткой 21 и гайкой 22 для удержания гайки 10 на рукоятке 21 имеется штифт 23, который входит в паз 24 на корпусе 1 с возможностью продольного перемещения в нее и служит для удержания механизма сведения 9 от поворота относительно корпуса 1. В передней части механизма имеются прорези 25 и 26 для выхода хвостовиков 11 и 12 сжимающих губок 5 и 6.
Винтовой шьющий элемент 3 имеет заостренный передний конец 27 и отогнутый хвостовик 28, связанный с винтом 4 посредством паза 29 для передачи вращения от винта 4 на винтовой шьющий элемент 3.
Аппарат работает следующим образом.
Из аппарата вывинчивается винт 4 механизм прошивания. В его паз 29 вставляется хвостовик 28 винтового шьющего элемента 3 и они вместе с винтом вставляются в корпус 1 аппарата. Затем вращением винта 4 винтовой шьющий элемент 3 ввинчивается вместе с винтом 4 в винтовые канавки 2 корпуса 1 до появления переднего конца 27 винтового шьющего элемента 3 из отверстия со стороны торца 33 корпуса 1. При этом винт 4 также ввинчивается в канавку 2.
Вращением шайки 10 механизм сведения 9 перемещают в сторону сжимающих губок 5 и 6. При этом прорези 25 и 26 становятся напротив хвостовиков 11 и 12. Под действием пружин 15 и 16 хвостовики 11 и 12 выходят из пазов 13 и 14 корпуса 1 и вместе с ними расходятся сжимающие губки 5 и 6. Прошиваемый орган помещается в пространстве 31 между сжимающимися губками 5 и 6.
Затем вращением гайки 10 в обратном направлении механизм сведения 9 перемещают в обратную сторону. Его конец 32 наезжает на хвостовики 11 и 12 и, преодолевая усилия пружин 15 и 16, утапливает их в пазы 13 и 14 и заставляет сходиться сжимающие губки 5 и 6, которые сжимают прошиваемый орган. С одного конца сжимающих губок ткань ограничивается ограничителем 18, с другого - торцом 33 корпуса 1.
Механизм сведения 9 отводится назад до упора в стопорную шайбу 20. Сжатую биологическую ткань прошивают винтовым шьющим элементом 3, вращая винт 4. Вращение винта 4 передается винтовому шьющему элементу 3 через паз 29, и он ввинчивается в ткань, прошивая ее по всей толщине на всей длине шва.
Во время прошивания винтовой шьющий элемент 3 своими витками проходит по неполным винтообразным направляющим канавкам 17 сжимающих губок 5 и 6, которые не дают ему уйти в сторону.
После полного ввинчивания винтового шьющего элемента вращением гайки 10 разводят сжимающие губки 5 и 6 и вынимают прошитый орган.
При прошивании винтовой шьющий элемент не деформируется. Он остается такой же формы и с такими же геометрическими параметрами, какие были до прошивания. Поэтому аппарат не обладает механизмом регулировки зазора прошивания. Расстояние между сжимающими губками 5 и 6 при прошивании всегда постоянно.
Возможно в трубчатом корпусе аппарата разместить два и более винтовых шьющих элемента в одном отверстии корпуса. Винтовые шьющие элементы могут иметь одинаковое направление винта и быть смещенными вдоль оси трубчатого корпуса, например, на полшага и располагаться в отдельных канавках. Прошивание производится одним винтом. Такие шьющие элементы могут иметь разное направление витков, находиться друг в друге (иметь разные диаметры) и приводиться в действие разными винтами. Эти способы дают более герметичный шов, так как ткань зажимается между противоположно расположенными витками винтовых шьющих элементов.
Для достижения большей герметичности и гемостатичности возможно произвести деформацию витков винтового шьющего элемента 3.
Это возможно осуществить вручную или автоматически.
Аппарат с ручным механизмом деформации винтового шьющего элемента имеет основные узлы и детали, аналогичные предыдущему аппарату, а также то же их цифровое обозначение.
Он имеет одну качающуюся сжимающую губку 5 на осях 7 и 8 с отогнутым хвостовиком 34 и неподвижную сжимающую губку 6, соединенную с корпусом 1. Кроме того, аппарат снабжен ручным механизмом деформации винтового шьющего элемента, состоящим из деформирующей пластины 35, которая утоплена в пазу сжимающей губки 6 пружинами 36, клина 37 с возвратной пружиной 38 и рукоятки 39, укрепленной на цилиндрической рукоятке 21 осью 40 с пружиной 41.
Аппарат работает следующим образом.
Заряженный, как и в предыдущем случае, аппарат вводится в операционную зону.
Раскрытие сжимающих губок производится вращением гайки 10 таким образом, что механизм сведения 9 отводится назад. Своей перемычкой 42 трубчатая часть механизма сведения 9 надавливает на отогнутый хвостовик сжимающей губки 5 и утапливает ее в паз 14 корпуса 1. Сжимающая губка 5, вращаясь вокруг осей 7 и 8, отводится в сторону. Механизм сведения 9 отводится до упора в стопорную шайбу 20. После помещения прошиваемого органа в пространство 31 между сжимающими губками 5 и 6 гайку 10 вращают в обратном направлении. Механизм сведения 9 подается вперед и, нажимая на сжимающую губку 5 своей перемычкой 42, закрывает ее. Механизм сведения 9 подводится вперед до упора в ограничитель ткани 18. Своими скосами 43 и 44 механизм сведения 9 входит в косые пазы 45 и 46 ограничителя ткани 18, надежно фиксируя сжимающую губку 5.
После полного прошивания ткани винтовым шьющим элементом 3 производится его деформация. Рукоятка 39 прижимается к рукоятке 21. Рычаг 47 воздействует на торец клина 37, который, перемещаясь вперед, своими косыми площадками 48 и 49 подает деформирующую пластину 35, которая выходит из сжимающей губки 6 в сторону сжимающей губки 5 по всей длине шва и, надавливая на витки винтового шьющего элемента, деформирует их. Деформированный винтовой шьющий элемент плотнее сжимает прошитую ткань.
После отпускания рукоятки 39 пружина 40 возвращает ее в исходное положение, пружина 38 возвращает клин 37 назад, а пружина 36 утапливает деформирующую пластину 35 в паз сжимающей губки 6.
Рукоятка 39 с рычагом 47 перемещается вместе с механизмом сведения 9, так как установлена на нем, а клин 37 установлен в корпусе 1. Таким образом, рычаг 47 взаимодействует с клином 37 только тогда, когда механизм сведения 9 находится в крайнем переднем положении.
От смещения назад клин 37 удерживается выступами 50 на корпусе 1. Прорезь 51 в передней части механизма сведения 9 необходима для того, чтобы прошиваемый орган, располагающийся между сжимающими губками 5 и 6, не мешал перемещению вперед этого конца.
Процесс деформации винтового шьющего элемента может быть автоматизирован.
Аппарат с автоматическим механизмом деформации винтового шьющего элемента имеет основные детали и узлы такие же, как и в предыдущей конструкции, и с теми же обозначениями. Автоматический механизм деформации винтового шьющего элемента состоит из деформирующей пластины 35, клина 37 с вилкообразным хвостовиком 52, охватывающим стержень винта 4 механизма прошивания, деформирующей пружины 53 и рычага 54, укрепленного на корпусе 1 осями 55 и 56 с возможностью качания вокруг них. Рычаг 54 имеет переднюю 57 и заднюю 58 косые площадки. Винт 4 механизма прошивания имеет фланец 59.
Аппарат работает следующим образом.
Сведение и разведение сжимающих губок производится так же, как и в предыдущем устройстве. Автоматический механизм деформации винтового шьющего элемента связан с винтом 4 механизма прошивания.
В исходном положении (фиг. 15) вилка 52 клина 37 опирается на фланец 59 винта 4 под действием пружины 53.
При вращении винта 4 и его перемещении вперед клин под действием деформирующей пружины 53 перемещается вперед и опирается на конец 60 рычага 54, который опущен вниз (фиг. 16). Винт 4 продолжает перемещаться вперед уже без клина 37 до конца прошивания. В конце прошивания винт 4 фланцем 59 надавливает на заднюю косую площадку 58 рычага 54 и приподнимает его конец 60 (фиг. 17). Клин 37 под действием деформирующей пружины 53 перемещается вперед и своими косыми площадками 48 и 49 выталкивает деформирующую пластину 35 в сторону губки 5 для сжатия тканей. Пластина 35 деформирует витки шьющего элемента.
При вывинчивании винта 4 из корпуса 1 фланец 59, преодолевая сопротивление пружины 53, отводит клин 37 назад. Когда отвод закончен, винт 4 задним торцом винтового участка 61 надавливает на переднюю косую площадку 57 рычага 54 и опускает его передний конец 60 в исходное положение до прошивания.
Для разборки аппаратов достаточно вывентить винт 4 и снять стопорную шайбу 20. Вращением гайки 10 снимается назад механизм сведения 9 и вынимаются детали механизмов деформации винтового шьющего элемента. Гайка 22 необходима для отсоединения гайки 10 от рукоятки 21. Для разделения гайки 10 и гайки 22 в гайке 22 выполнен паз 62.
Аппараты для наложения механического обвивного шва могут иметь малые габариты рабочей части и позволять накладывать механический обвивной шов на органы при ушивании их при эндоскопических операциях или при операциях в узких глубоких ранах, а так же при сшивании края паринхиматозного органа.
| название | год | авторы | номер документа |
|---|---|---|---|
| ХИРУРГИЧЕСКИЙ СШИВАЮЩИЙ АППАРАТ ДЛЯ НАЛОЖЕНИЯ ЛИНЕЙНЫХ ШВОВ НА ПОЛЫЕ ОРГАНЫ | 1993 |
|
RU2088159C1 |
| ХИРУРГИЧЕСКИЙ СШИВАЮЩИЙ АППАРАТ ДЛЯ ЭНДОСКОПИЧЕСКИХ ОПЕРАЦИЙ | 1993 |
|
RU2110221C1 |
| СШИВАЮЩЕЕ УСТРОЙСТВО ДЛЯ НАЛОЖЕНИЯ МЕХАНИЧЕСКОГО ОБВИВНОГО ШВА | 2007 |
|
RU2328228C1 |
| МНОГОРАЗОВЫЙ ИНСТРУМЕНТ ДЛЯ НАЛОЖЕНИЯ КОЖНЫХ ШВОВ С ВЕРТИКАЛЬНОЙ КАТУШКОЙ | 2017 |
|
RU2699171C1 |
| Хирургический аппарат для наложения линейных швов | 1984 |
|
SU1327883A1 |
| Хирургический сшивающий аппарат для наложения линейных швов | 1979 |
|
SU886899A1 |
| СШИВАЮЩАЯ МАШИНКА (ВАРИАНТЫ) | 1993 |
|
RU2119771C1 |
| ХИРУРГИЧЕСКИЙ АППАРАТ ДЛЯ УШИВАН ОРГАНОВ | 1972 |
|
SU354852A1 |
| АППАРАТ ДЛЯ НАЛОЖЕНИЯ ПОГРУЖНЫХ ШВОВ П-ОБРАЗНЫМИ | 1965 |
|
SU176037A1 |
| АППАРАТ ДЛЯ НАЛОЖЕНИЯ МЕХАНИЧЕСКИХ ШВОВ НА ПИЩЕВАРИТЕЛЬНОМ ТРАКТЕ | 1967 |
|
SU200723A1 |


Хирургический сшивающий аппарат для наложения механического обвивающего шва относится к медицинской технике. В трубчатом корпусе 1 выполнена как минимум одна нарезанная в отверстии винтовая канавка 2. В роторе 5 располагается как минимум один винтовой деформируемый шьющий элемент 3 в виде металлической цилиндрической пружины. Сжимающие губки 5, 6 имеют неполные винтообразные направляющие канавки 17 и механизм сведения, а механизм прошивания с цилиндрической винтовой пружиной расположен в винтовой канавке 2. Во время прошивания винтовой шьющий элемент 3 своими винтами проходит по неполным винтообразным направляющим канавкам 17 сжимающих губок 5, 6, которые не дают ему уйти в сторону, обеспечивая герметичность и гемостатичность шва. Для достижения еще большей герметичности и гемостатичности можно провести деформацию витков винтового шьющего элемента 3. 3 з.п.ф-лы, 23 ил.
| DE, 2801096 В2 (Vsesojuzngi nautchno-issle dovatelskij i ispytatelngi institut medicinskoj techniki), 06.12.79, a 61 b 17/04 | |||
| SU, 923530 (Солтанов Б.С | |||
| и др.), 30.04.82, A 61 B 17/04 | |||
| SU, 1034728 А (Белобров Ю.П | |||
| и др.), 15.08.83, a 61 B 17/06. |
