Изобретение относится к области точного приборостроения, более конкретно - к гидроскопическому приборостроению, и может быть использовано при разработке прецизионных динамически настраиваемых гироскопов для систем управления летательных аппаратов.
Динамически настраиваемые гироскопы (ДНГ) с упругим вращающимся подвесом ротора хорошо известны в технической литературе (см, например, Брозгуль Л.И. , Смирнов Е. Л. Вибрационные гироскопы. В сб. "История механики гироскопических систем". М.: Наука, 1975; Обзор "Интерциальные навигационные системы на динамически настраиваемых гироскопах". Вопросы ракетной техники, N 2, 1974). В таких гироскопах ротор-носитель кинематического момента связан с валом привода посредством упругого подвеса, включающего две пары торсионов и промежуточное кардановое кольцо. Упругий подвес обеспечивает свободу угловых перемещений ротора относительно любой оси, лежащей в его экваториальной плоскости. Однако углы прокачки упругого подвеса, как правило, весьма невелики, поскольку при относительно больших углах отклонения ротора напряжения, возникающие при кручении торсионов, превышают предел упругости. Поэтому на практике чувствительный элемент ДНГ обычно снабжают цилиндрическим ограничительным упором (или упорами), жестко связанным с приводным валом. Такой упор не только ограничивает углы кручения торсионов, но и предохраняет вращающийся ротор от касания о неподвижные корпусные детали, например, датчик угла, расположенный в непосредственной близости с ротором.
Динамически настраиваемый гироскоп, содержащий ротор-носитель кинематического момента и приводной вал с ограничительным упором, принят авторами за прототип. Такой гироскоп при сравнительно малых габаритах и весе позволяет получить достаточно высокую точность.
Одним из существенных факторов, ограничивающих точность ДНГ, является низкое аэродинамическое трение. Как показано в работе Р.Крейга (Craig R. Theory of Errors of a Multigimbal Ebstically Supportod Tuned Gyroscope, JEEE Trens an Aerospace and Electronic Systems, May 1972, v. AES-8, N 3),
скорость ухода гироскопа в проекциях на оси чувствительности равна: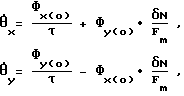 ,
,
где - проекции угловых отклонений ротора ДНГ на оси чувствительности;
- проекции угловых отклонений ротора ДНГ на оси чувствительности;
τ - постоянная времени гироскопа (характеризует уровень вязкого трения);
δN - расстройка ДНГ по скорости (отличие скорости вращения гироскопа от резонансного значения);
Fm - показатель качества гироскопа.
Первые слагаемые в этих выражениях характеризуют уход гироскопа под влиянием демпфирующих моментов, которые возникают главным образом из-за взаимодействия карданового кольца и ротора с окружающим газом. Для снижения демпфирующего эффекта внутреннюю полость, как правило, вакуумируют. Однако стабилизировать малое давление весьма сложно, поскольку некоторые конструкционные материалы (смазка, подшипников, клеи и др.), благодаря своей пористости или присутствию легко разлагающихся компонентов, выделяют газы в вакуум (Розберн Ф. Справочник по вакуумной технике и технологии, пер. с англ. М. , Энергия, 1972 г.). Количество выделяющихся газов определяется рабочей температурой и временем, в течение которого поддерживается эта температура. Поскольку в процессе эксплуатации рабочая температура может быть высокой в течение достаточно длительного времени, стабилизировать давление на требуемом уровне не выше 0,01-0,05 мм рт.ст. оказывается затруднительным.
В реальных конструкциях ДНГ скорость ухода, обусловленная вязким трением, составляет  .
.
Целью настоящего изобретения является устранение указанного недостатка. Предлагается, с целью повышения точности, на внешней цилиндрической поверхности ограничительного упора нарезать спиральную канавку прямоугольного поперечного сечения.
На чертеже показано предлагаемое устройство в разрезе. Ротор 1 гироскопа посредством упругого подвеса связан с приводным валом 2, на котором имеется фланец 3, ограничивающий углы прокатки ротора и выполняющий функции ограничительного упора. На внешней цилиндрической поверхности упора выполнена спиральная канавка 4 поперечного прямоугольного сечения. Вращающийся узел ДНГ установлен в шарикоподшипниковых опорах в корпусе 5, внутренняя поверхность которого образует малый зазор с боковой поверхностью упора, содержащей спиральную канавку.
При вращении упора 3 молекулы газа, попадающие в канавки, получают импульс движения в осевом направлении в соответствии с перемещением гребня между канавками вдоль оси. Таким образом, устанавливается поток газа в осевом направлении, и при определенном направлении вращения упора молекулы остаточного газа "перекачиваются" из полости ротора ДНГ в полость корпуса, лежащую по другую сторону упора. Это явление используется в молекулярных насосах и широко освещено в литературе по вакуумной технике (например, Грошковский Я. Техника высокого вакуума, М.. Мир, 1975 г., стр. 208). Для получения эффективной молекулярной откачки зазор между внешней поверхностью упора и ответной поверхностью корпуса следует делать минимальным.
В реализованном варианте предлагаемой конструкции при диаметре упора 50 мм, скорости вращения  , глубине (и ширине) канавки 2,5 мм и величине зазора 0,035 мм получено отношение давлений в полостях корпуса, разделенных упором, равное 3500. Для этой же конструкции получено давление в полости ротора (на входе насоса) 2,5•10-3 мм рт.ст. при давлении на выходе насоса 2 мм рт.ст.
, глубине (и ширине) канавки 2,5 мм и величине зазора 0,035 мм получено отношение давлений в полостях корпуса, разделенных упором, равное 3500. Для этой же конструкции получено давление в полости ротора (на входе насоса) 2,5•10-3 мм рт.ст. при давлении на выходе насоса 2 мм рт.ст.
Такое давление в полости ротора ДНГ позволяет получить постоянную времени гироскопа порядка 80-100 сек, что соответствует скорости ухода  .
.
Таким образом, реализация предложения позволит уменьшить уход ДНГ приблизительно на  , что в плане современных требований весьма существенно.
, что в плане современных требований весьма существенно.
Использование: в области точного приборостроения и может быть использовано при разработке прецизионных динамически настраиваемых гироскопов для систем управления летательных аппаратов. Сущность изобретения: динамически настраиваемый гироскоп с упругим вращающимся подвесом содержит ротор, приводной вал с ограничительным упором, датчик угла, электродвигатель и корпус, на внешней цилиндрической поверхности ограничительного упора нарезана спиральная канавка прямоугольного поперечного сечения. 1 ил.
Динамически настраиваемый гироскоп с упругим вращающимся подвесом, содержащий ротор, приводной вал с ограничительным упором, датчик угла, электродвигатель и корпус, отличающийся тем, что, с целью повышения точности на внешней цилиндрической поверхности ограничительного упора нарезана спиральная канавка прямоугольного поперечного сечения.
| Инерционные навигационные системы на динамически настраиваемых гироскопах | |||
| Вопросы ракетной техники, N 2, 1974. |
