Изобретение относится к измерительной технике и может быть использовано для измерения или регулирования крутящего момента в установках со значительными располагаемыми и потребляемыми мощностями, например, на морских судах для измерения крутящего момента на валах гребных винтов, на валах прокатных металлургических станов, на валах несущего ротора вертолета, на валу газоперекачивающего агрегата, на валу редуктора турбо-винтового авиационного двигателя и т.д.
Описанные в технической литературе способы измерения крутящего момента сводятся к измерению фазового сдвига двух напряжений, формируемых двумя генераторами.
В известных устройствах (независимо от применения индукционных или емкостных датчиков) формируются, в конечном итоге, сдвинутые по фазе два напряжения, что и измеряется как сдвиг фаз двух напряжений, пропорциональный действующему крутящему моменту.
Изобретение относится к числу пионерских, так как в нем впервые описывается способ измерения крутящего момента в чисто цифровой форме, начиная от датчиков формируемых сигналы в цифровой форме (в цифровом виде) и кончая видом выходной информации в виде единичного кода. Впервые описывается использование свойств шкал Нониуса на вращающихся валах (деталях), позволяющих трансформировать без потерь незначительный измеряемый угол закрутки вала в значительный угол, на котором происходит совпадение импульсов, что и измеряется в цифровой форме суммой числа импульсов.
Цель изобретения заключается в обеспечении повышенной точности измерения крутящего момента (Mкр), а следовательно в повышенной точности измерения механической мощности, передаваемой валом от источника мощности к потребителю с приборной погрешностью не хуже, чем 0,25% от максимально измеряемого значения, кроме того изобретение направлено на обеспечение системы регулирования изделия цифровой информацией о текущем значении уровня крутящего момента Mкр, например в виде единичного кода.
Изобретение обеспечивает возможность проведения сквозной проверки технического состояния в целом всей системы без применения внешних контрольных систем, а так же при отладке измерителя крутящего момента обеспечивает приборным способом возможность корректировки технологических неточностей и допусков на изготовление деталей и сборку изделия с целью устранения этих неточностей на заключительном этапе его сборки.
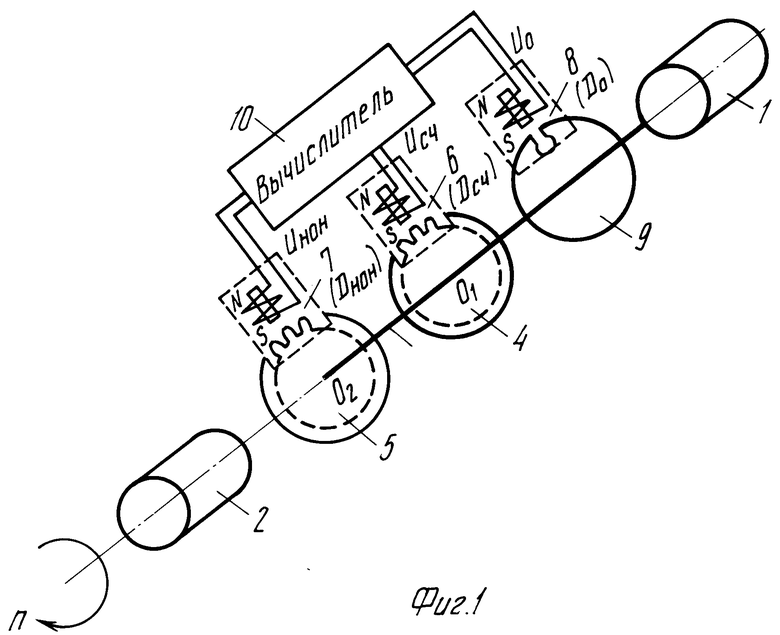
На фиг. 1 приведены взаимосвязанные элементы, обеспечивающие последовательность и условия проведения действий способа измерения угла закрутки вала, где 1 - источник мощности, 2 - потребитель мощности, 3 - вал измерительный (O1 - O2), 4 - счетная шестерня, 5 - нониусная шестерня, 6 - датчик счета (Дсч), 7 - нониусный датчик (Днон), 8 - датчик нулевого импульса (Д0), 9 - индуктор (диск) управления, 10 - вычислитель нониусного цифрового измерителя крутящего момента.
На валу со стороны источника мощности установлен датчик частоты вращения с диском индуктором 9. Диск индуктора имеет одну впадину, что обеспечивает за один оборот вала один начальный импульс И0. Этот импульс И0 разрешает начало действий измерения в одном каждом совершаемом обороте вала, он же сбрасывает (обнуляет) схему вычислителя 10 по завершению полного оборота валом. Впадина на диске индуктора смещена с опережением в угловом направлении вращения вала по отношению к "нулевому" зубу датчика Дсч с учетом направления вращения вала по стрелке n, например, на 1/8 ± 20% шага расстановки нулевого зуба шестерни счета датчика Дсч (фиг. 3).
Датчик Дсч 6 формирует импульсы счета Исч по мере прохождения зубьями шестерни датчика Дсч. Шестерня нониуса 5 датчика Днон 7, установленная на выходном конце вала со стороны потребителя мощности, формирует в датчике нониуса Днон свои импульсы Инон с угловым запаздыванием по направлению вращения вала пропорционально величине закрутки вала.
Нулевые зубья обоих шестерен (они же по счету последние, например 0/68/, 0/69) в угловом направлении совмещены по условиям сборки их по валу.
На холостых оборотах вала при отсутствии крутящего момента (при Мкр = 0) оба нулевые импульсы датчика счета и датчика счета и датчика нониуса совмещены. Остальные импульсы, формируемые по мере поворота вала другими зубьями при проходе осей своих датчиков, не обеспечивают совпадения по углу поворота вала. При этом в вычислителе схема совпадения импульсов, принадлежащих соответственно нулевым зубьям датчиков Дсч, Днон, фиксирует совпадение импульсов и как следствие фиксируется отсутствие закрутки вала с результатом измерения, равным нулю.
Последовательность действий выше описанных взаимосвязанных элементов сводится к следующему.
При вращении вала сформированный начальный импульс - И0 обнуляет схему и разрешает доступ импульсного счета - Исч на схему совпадения в вычислителе.
На эту схему совпадения поступают и импульсы датчика нониуса Днон. При дальнейшем повороте вала схема совпадения вычислителя фиксирует угол поворота вала, на котором произошло совпадение Исч и Инон (угол совпадения ϕсовп ), формируя импульс совпадения Исовп. Импульс совпадения Исовп прекращает отсчет измерительных импульсов, он же служит и разрешением (командой) для выдачи из счетчика замеренного числа импульсов на цифровой индикатор вычислителя. С очередным формированием начального импульса И0 датчика схема вычислителя сбрасывается, а цикл измерения вновь повторяется каждый последующий оборот вала.
Причино-следственная связь средств известных до даты приоритета (шестерни, импульсные датчики, вал, электронные устройства) обусловлена причиной, как таковой, разницей числа зубьев шестерен счета и нониусной на один зуб. Изменение угла закрутки вала изменяет порядковый номер зуба счетной шестерни, следовательно и номер счетного импульса, на котором счетный и нониусный импульсы совпадают. При этом сумма измерительных импульсов от начала счета (от нулевого счетного импульса) при повороте вала до угла совпадения прямопропорциональна измеряемому углу. Электронные узлы отыскивают нулевой зуб, формируют длительность импульсов, фиксируют совпадение импульсов, суммируют измерительные импульсы и, как технический результат, индицируют число прямопропорциональное искомому углу.
Датчик нулевого импульса Д0 по углу поворота первый формирует свой импульс И0, по сравнению с импульсами датчиков Инон. Этот импульс И0 обнуляет схему, поступая в схему управления, в схему управления датчика полезного сигнала СПС, в схему управления счетчика холостого хода СХХ, в декадную схему индикатора.
Следующая последовательность по углу поворота вала осуществляется формированием импульса датчика счета Дсч. Этот импульс преобразуется, формируется в ФФ, ФД, приобретая параметры Исч. Импульс счета Исч (первый пришедший после И0) поступает на вход схемы совпадения СС и в схему управления СУ. Схема управления по этому первому (по счету) импульсу счета Исч, открывает доступ измерительным импульсам на вход счетчика холостого хода СХХ. При переполнении заданной (технологической) емкости счетчика СХХ, что задается внешними ключами К1, К2 - Кn в процессе отладки нониусного цифрового измерителя крутящего момента измерительные импульсы поступают на вход счетчика полезного сигнала СПС до момента формирования схемой совпадения СС импульса совпадения Исовп. Этот импульс Исовп схемой управления СУ, удерживается в качестве действующего сигнала до окончания оборота вала, где вновь сформируется нулевой импульс И0.
Преобразованный импульс Инон датчика Днон, нулевого зуба шестерни при Мкр > 0, сдвинут с отставанием по углу поворота вала от импульса Исч пропорционально углу закрутки вала. Вследствие наличия закрутки вала θ импульсы Исч и Инон окажутся совмещенными (совпадут) на большем угле поворота вала. Это совмещение (совпадение) фиксируется схемой совпадения СС, с формированием импульса Исовп. Импульс Исовп, как сказано выше, схемой управления преобразуется в сигнал и уровень которого удерживается до окончания оборота валом до прихода очередного импульса И0.
Импульс совпадения Исовп (и его сигнал) в системе СУ прекращает доступ измерительных импульсов Иизм на вход СХХ и далее на вход СПС.
Сумма измерительных импульсов Иизм в счетчике полезного сигнала СПС и есть фактически результат измерения. Этот же импульс Исовп включает декадную схему индикатора ИНД в режим индикации до завершения оборота валом, где вновь сформированный импульс И0 произведет обнуление схемы и даст разрешение следующему циклу измерения.
При включении и выключении измерительных импульсов Иизм на суммирование в СХХ, СПС, из-за несовпадения команд коммутации в системе управления, возможна потеря одного, двух импульсов счета. Чтобы уменьшить "вес" потерянных импульсов и он был бы незначительным, суммируются (считаются) специально подготовленные импульсы умножителем частоты измерительных импульсов УЧИИ.
Угловая длительность импульсов Исч, Инон задается формирователями угловой длительности ФД1, ФД2, используя фиксированное число импульсов после умножителя частоты следования импульсов умножителя частоты шаговых импульсов - УЧШИ, преобразуя кратковременные начальные импульсы Исч.нач, Инон.нач до угловой длительности действия δу .
Такой прием формирования угловой длительности δу импульсов Исч, Инон позволяет избежать погрешности измерения в широком диапазоне частоты вращения вала. Ключ КП в нажатом положении при холостом ходе (Мкр = 0) позволяет измерить технологическую неточность установки шестерен обоих датчиков Дсч, Днон, возникшую из-за несовмещения нулевых зубьев шестерен и установки датчиков частоты вращения. Эта измеренная технологическая неточность в процессе отладки нониусного цифрового измерителя крутящего момента в виде числа импульсов вводится в счетчик холостого хода СХХ внешними ключами К1, К2 - Кn, а в рабочем режиме измерения при Мкр > 0 не поступает в счетчик полезного сигнала СПС. Ключ КП при работе изделия (когда Мкр > 0) позволяет осуществлять сквозную проверку работоспособности системы. Разница показаний индикатора при обоих положениях ключа КП соответствует набранному значению на ключах К1 - Кn при технологической
отладке нониусного цифрового измерителя крутящего момента.
Выход в систему регулятора изделия предусмотрен в виде единичного кода посылками серий импульсов Иизм каждый совершенный цикл измерений (т.е. каждый совершенный оборот вала), а также и импульсов И0.
Для подтверждения возможности осуществления изобретения приведен пример способа измерения угла закрутки вала, закрученного действием крутящего момента с использованием шкалы Нониуса при непрерывно вращающемся вале на авиационном двигателе.
1. Исходные данные для расчета.
Частота вращения вала (обороты двигателя).
nmin = 4000 об/мин; nmax = 9000 об/мин.
Номинальная закрутка вала крутящим моментом θ = 2° (при длине вала l = 350 мм).
Требуемая точность измерения крутящего момента не хуже, чем 0,25% от номинального значения Мкр.
1.1. Датчики частоты вращения - ДЧВ
Выбраны с учетом характеристик и конструктивных особенностей, серийно освоенных в производстве, датчики ДЧВ-2500 (2500 Гц - верх. диапазон по Т.У. ).
1.2. Возбудители датчиков.
По конструктивным и технологическим соображениям, возбудители датчиков эвольвентные шестерни с числом зубьев:
шестерня счета Z1 = 68 зуба
шестерня нониуса Z2 = Z1 + 1 = 69 зуба.
Возбудитель датчика нулевого импульса принят в виде диска с одной впадиной Z0 = 1. Примечание. При необходимости наружный диаметр шестерен Z1 и Z2 отшлифовать на два радиуса по делительным окружностям шестерен.
2. Угловой шаг шестерен.
 .
.
3. Угловая разность шага возбудителей (Дискретный угол).
 .
.
4. Диаграмма угловой расстановки импульсов датчиков Дсч, Днон (фиг. 4) (при Мкр = 0 по повороту вала за один оборот)
Импульсы счета Исч и нониуса Инон при Мкр = 0 совпадают (и совмещаются) передними фронтами в начале и конце каждого оборота.
Длительность импульсов δу (угловая) Исч, Инон равна .
.
5. Совпадение импульсов Исч, Инон при θ > 0 и Мкр > 0.
На предыдущей диаграмме при Мкр = 0 совпадают нулевые импульсы. По мере приращения θ последовательность совпадения импульсов при каждом приращении θ на угол Δу выполняется последовательно на первой паре импульсов Исч1, Инон1, на второй паре и т.д.
Таким образом, угол ϕc совпадения импульсов каждой пары зубьев пропорционален углу закрутки вала.
В угол шага шестерни нониуса  угловая разность шага шестерен Δу укладывается Z1 раз.
угловая разность шага шестерен Δу укладывается Z1 раз.
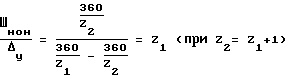 ,
,
т.е. угол Δу= 0,0767° кратно укладывается в шаг Шнон = 5,2174o.
Так как требуемый диапазон измерения закрутки вала равен θ = 2° номер пары совмещенных импульсов Nпси (соответствующий углу закрутки вала) определится как .
.
При этом передние фронты импульсов Исч и Инон не совпали, но эти импульсы с угловой длительностью δу совместились для формирования импульса (и сигнала) совпадения Исовп (фиг. 5).
Проверка. Что "весит" 0,0685 "зуба" в угловых единицах? .
.
Несовпадение передних фронтов импульсов Исч и Инон на X = 0,00526o меньше, чем δу= 0,03835° , что и должно выполняться при цифровом (дискретном) способе обработки информации.
6. Угол совпадения ϕc , при котором прекращается суммирование импульсов счета.
 .
.
При закрутке вала на θ = 2° угловой коэффициент передачи Kпс способа составит .
.
7. Погрешность способа.
Относительная погрешность, отнесенная к номинальному значению θ = 2° составит .
.
8. Формирование постоянной величины угловой длительности импульсов Исч, Инон при изменении оборотов вала.
На фиг. 2 представленная блок-схема, которая предусматривает использование в качестве генератора импульсов преобразованные по форме импульсы Иисх датчика Дсч, частота следования которых отслеживает частоту вращения вала.
Следовательно, и длительность δу импульсов Исч, Инон должна отслеживаться по оборотам вала в той же зависимости (пропорции). Для этой цели в схеме предусмотрены формирователи длительности ФД1, (ФД2) в одинаковом схемном исполнении.
Ниже приведена диаграмма импульсов Исч.нач, Исч, Иучши, δτ , И0, по каналу датчика Дсч. Длительность Исч.нач по времени формирует ФД1 /2/.
Угловая длительность δу импульса счета Исч формируется передним фронтом импульса Исч.нач и заканчивается по мере накопления (заданных) импульсов Иучши, поступающих после умножителя частоты шаговых импульсов в количестве 32 импульсов.
Шаговые импульсы Иучши формируются после умножителя частоты сигналов Дсч, сигнал которого в силу принятого числа зубьев шестерни счета Z1 = 68 близок к гармонической форме и позволяет выполнять действие умножения.
Примем коэффициент умножителя импульсов Исчисх умножителем частоты шаговых импульсов равным K = 212 = 4096, тогда (фиг. 6, диаграмма) число импульсов ∑ Uучши формируемые угловую длительность будет: .
.
В целях схемного решения формирователя ФД1 (ФД2) примем число ∑Uучши= 25= 32 . Такое упрощение внесет дополнительную ошибку в измерение. С учетом этой дополнительной (внесенной) ошибки погрешность измерения составит .
.
9. Сумма измерительных импульсов (емкость счетчика полезного сигнала СПС и счетчика холостого хода СХХ).
Номинальный угол совпадения ϕc при θ = 2° составляет 136o поворота вала (п. 6) и соответствует совпадению на 26 паре зубьев шестерен датчиков Дсч, Днон.
Чтобы уменьшить "вес" потерянного импульса Иизм при несовпадении команд формируемых системой управления СУ, применен умножитель частоты измерительных импульсов УЧШИ. Исходя из этого при ϕc= 136° (совпадает 26-я пара зубьев) коэффициент УЧШИ принимается равным
Kизм = 27 = 128.
При принятом значении Kизм за поворот вала на угол, равный Шсч = 5,2941o сформируется 128 импульсов Иизм, а к моменту совпадения импульсов Исч и Инон на 26-й паре зубьев (ϕc= 136°) шестерен сумма измерительных импульсов составит .
.
Цена "потерянного" импульса Иизм в процентах составит .
.
10. Полная емкость счетчика  полезного сигнала счетчика полезного сигнала СПС принимается с резервом
полезного сигнала счетчика полезного сигнала СПС принимается с резервом .
.
11. Полная емкость счетчика  холостого хода - СХХ принимается равной емкости СПС.
холостого хода - СХХ принимается равной емкости СПС.
12. Погрешность.
Суммарная погрешность измерения при принятых и заданных значениях Z1, Z2, θ составит при арифметическом подсчете методом суммирования составляющих и потери импульса Иизм из-за несовпадения команд СУ.
 .
.
13. Угловая длительность δу (п. 8) импульсов Исч, Инон формируется 32 импульсами Иучши - умножителя частоты шаговых импульсов.
Временная длительность δτ начальных импульсов Исч.нач принимается равной половине времени, потребного на совершение поворота вала на угол δу (фиг. 6).
Период оборота вала при nmax = 9000 об/мин .
.
Период оборота вала при nmin = 4000 об/мин ,
,
временная длительность δτ на этих оборотах вала будет .
.
В целях упрощения схемы ФФ1 (ФФ2, ФФ3) принимается длительность начальных импульсов И0; Исч.нач; Инон.нач одинаковой  .
.
14. Уравнение способа нониусного цифрового измерителя Мкр.
В пункте 5 расчета показано, что в угол шага нониусной шестерни Шнон, разность Δу шагов шестерен счета и нониуса укладывается кратно Z1 раз (68 раз)
Принимая во внимание, что приращение угла закрутки вала θ на величину Δу пропорционально сумме числа измерительных импульсов ∑ Uизм , эквивалентно коэффициенту умножения измерительных импульсов Kизм (п. 9), следует, что сумма измерительных импульсов от начала счета измерения до номера пары зубьев шестерен Nпси, на которой происходит совмещение импульсов Исч, Инон, обеспечивающих формирование импульса совпадения Исовп. выразится как: .
.
В конкретном случае расчета при Z1 = 68, Z2 = 69 и Kизм = 128 .
.
Используя характеристику упругой закрутки вала от приложенного момента кручения, полученную в статических условиях тарировки (т.е. θ = f/Mкр(по числу ∑ Uизм определится действующий крутящий момент во время работы изделия.
Результаты расчета конкретного применения данного способа показывают:
1. Погрешность измерения крутящего момента на номинальном режиме изделия обеспечивается не хуже, чем 0,25% (По расчету 0,1% п. 12).
2. Данный способ обеспечивает выходную информацию для системы регулирования изделия в виде единичного кода (фиг. 2).
3. Способ обеспечивает возможность проведения сквозной проверки технического состояния измерителя в процессе эксплуатации изделия без применения внешних контрольных систем (фиг. 2).
4. При отладочных работах нониусным цифровым измерителем крутящего момента обеспечивается приборным методом возможность корректировки технологических неточностей и допусков на изготовление и сборку узлов измерителя, учитывающих эти неточности набором положения внешних электрических ключей (фиг. 2).
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для измерения характеристик нагруженности вращающегося вала | 1977 |
|
SU748152A1 |
| Способ испытания торсионных валов на усталость и стенд для его осуществления | 1989 |
|
SU1735734A1 |
| СПОСОБ КОНТРОЛЯ ЖЕСТКОСТИ ТОРСИОННОГО ШЛИЦЕВОГО ВАЛА ПРИ СКРУЧИВАНИИ | 2008 |
|
RU2369838C1 |
| СПОСОБ ПРЕОБРАЗОВАНИЯ КИНЕТИЧЕСКОЙ ЭНЕРГИИ СКОРОСТНОГО НАПОРА ВЕТРА И ВЕТРОУСТАНОВКА | 1992 |
|
RU2109981C1 |
| Устройство для измерения угла закручивания вращающегося вала | 1991 |
|
SU1795312A1 |
| УСТРОЙСТВО ДЛЯ ЗАКРУТКИ КОНЦОВ ПРОВОЛОКИ ВОКРУГ ЖГУТА | 1994 |
|
RU2095181C1 |
| ДИФФЕРЕНЦИАЛ С АВТОМАТИЧЕСКОЙ БЛОКИРОВКОЙ КОЛЕС | 1993 |
|
RU2119435C1 |
| БЕСШАТУННЫЙ ДВИГАТЕЛЬ ВНУТРЕННЕГО СГОРАНИЯ | 2010 |
|
RU2441997C1 |
| Способ измерения усилия кривошипного горячештамповочного пресса по крутящему моменту приемного вала | 2024 |
|
RU2837056C1 |
| Устройство для диагностирования зубчатых передач | 1983 |
|
SU1232887A1 |





Сущность изобретения: в способе используются прямоугольные электрические счетные и нониусные импульсы, число которых за один полый оборот вала отличается на один импульс из-за разницы числа зубьев счетной и нониусной шестерен, что и образует электрическую шкалу Нониуса. При пересечении зубьями счетной и нониусной шестерен геометрических осей омпульсных датчиков, оси которых расположены в плоскости, проходящей через геометрическую ось закручиваемого вала, формируются начальные импульсы, которые с помощью формирователей преобразуются в счетные и нониусные импульсы. Датчики и, соответственно шестерни, разнесены по длине закручиваемого вала. При угле закрутки вала равным нулю, нулевой зуб шестерни счета совмещается по профилю с зубом нониусной шестерни, счетный и нониусный импульсы формируются одновременно и совпадение импульсов проходит на новом порядковом номере зуба счетной шестерни, принятого при сборке за нулевой. При увеличении угла закрутки вала импульсы совпадают на другом порядковом номере зуба счетной шестерни. Измертилеьные импульсы формируются умножением частоты следования импульсов датчика счета и суммируются за период поворота вала, начиная с нулевого счетного импульса до факта совпадения очередного импульса счета с нониусным импульсом. При этом сумма измерительных импульсов прямо пропорциональна углу закрутки вала и не зависит от частоты вращения вала. 6 ил.