Изобретение относится к области дистанционного управления объектами, в частности летательными аппаратами, и предназначено для формирования оптического поля телеориентирования управляемых объектов.
В настоящее время широко известны системы наведения, использующие принцип телеориентирования управляемых объектов.
Одна из систем охарактеризована в патенте RU 2100745 C1, МПК6 F41G 7/26 от 27.12.1997 г.
Из этого патента известно устройство для формирования оптического поля для телеориентирования управляемых объектов, содержащее установленные соосно визир и прожектор, включающий источники света и оптическую систему, в которой прожектор выполнен в виде, как минимум, одной пары аналогичных ветвей, каждая из которых содержит схему запуска, а также последовательно установленные инжекционный лазер, отключающий оптический элемент и объектив, при этом лазер установлен вблизи фокальной плоскости системы, образуемой объективом и отклоняющим оптическим элементом, излучающие области лазеров установлены перпендикулярно измеряемых координат; отклоняющие оптические элементы выполнены в виде цилиндрических линз, закрепленных на общей рамке, установленной в корпусе на каленчатых валиках с возможностью плоскопараллельного движения по окружности, при этом оси цилиндрических поверхностей линз параллельны излучающим областям лазеров, входя схемы узлов соединены с выходами блоков кодирования, входы которых подсоединены к выходам блока модуляции, входы которых соединены с приводом рамки и первым выходом программного устройства, выходы схем запуска соединены с лазерами, второй выход программного устройства соединены с приводом рамки.
Известное устройство по патенту RU 2100745 C1, МПК6 F41G 7/26 от 27.12.1997 г. принято в качестве прототипа.
Данное устройство для формирования оптического поля для телеориентирования управляемых объектов имеет следующие недостатки:
1. Низкий энергетический патенциал оптического поля из-за последовательного расположения инфекционных лазеров и при отражении-отклонении плоские лучи не поляризуются и не суммируются.
2. Сложность сканирующего устройства с наличием цилиндрических линз, закрепленных на общей рамке, которая закреплена в корпусе на коленчатых валиках с возможностью плоскопараллельного движения по окружности с наличием объективов.
Элемент коленчатого валика, состоящий из двух щек и шейки, расположенной под прямым углом к продольной оси валика, служащий опорой и передающий крутящий момент, требует повышенной точности в изготовлении, работает на изгиб и кручение и дополнительно несет растягивающее усилие и требует повышенной прочности.
3. Кроме этого, возможна и кинематическая погрешность в различии между действительным расчетным положением рамки при плоскопараллельном движении по окружности из-за погрешности сборки, непостоянной по величине и знаку или принимающей значения в зависимости от ряда случайно действующих причин, определяемых величинами зазоров и натягов. При строгом постоянстве передаточного отношения при плоскопараллельном движении рамки по окружности из-за зазоров в сопряжениях коленчатых валиков кинематическая погрешность вызывает нелинейность и нестабильность в работе системы с ухудшением конструктивно-технических показателей. Кроме этого, дискретное переключение излучения может привести к сбою управления летательного аппарата.
Задачей изобретения является повышение энергетического потенциала устройства с постоянным излучением формирования оптического поля телеориентирования управляемых объектов с одновременным упрощением конструкции и улучшением технологичности сканирующего устройства.
Поставленная задача достигается устройством для формирования оптического поля для телеориентирования управляемых объектов, включающим две соосные системы: визирный канал и информационный канал, содержащий две ветви с инжекционным лазером в каждой, а также оптический отклоняющий элемент, объектив, свето- и фотодиоды и установленные в корпус сканирующее устройство с приводом, в него дополнительно в информационный канал установлена панкратическая система, а в каждую ветвь канала установлены перед инжекционным лазером линзы конденсора, отклоняющий оптический элемент выполнен в виде куба-призмы со светочувствительным покрытием по месту скрепления призм, составляющих куб-призму, сканирующее устройство кинематически связано с приводом через редуктор и выполнено в виде диска-прерывателя лазерного излучения с плоскопараллельной пластиной в центре оптической оси информационного канала, установленной в полости колеса редуктора привода, при этом колесо выполнено в виде закрепленной в корпусе редуктора втулки с зубчатым фланцем, на торце которого закреплен диск-прерыватель, выполненный в виде салинона с двумя полуокружностями разного диаметра, центры которых находятся на одной прямой с сопрягающими полуокружности, прямыми линиями, свето- и фотодиоды расположены в зоне сопряжений полуокружностей, а на валу привода размещен модулирующий диск, расположенный между свето- и фотодиодами, причем одна ветвь информационного канала с лазером и линзами конденсора, куб-призма, сканирующее устройство с диском-прерывателем, линзы панкратической системы и линзы объектива образуют оптическую ось информационного канала, а вторая ветвь с лазером и линзами конденсора установлена перпендикулярно кубу-призме.
Предложенное устройство для формирования оптического поля для телеориентирования управляемых объектов позволяет повысить энергетический потенциал оптического поля, упрощает конструкцию сканирующего устройства с улучшением ее технологичности. Это позволяет создать конструктивно простую и компактную наземную аппаратуру.
На фиг.1 представлена оптическая структурная схема устройства для формирования оптического поля для телеориентирования управляемых объектов, включающая две оптические соосные системы, где: 1 - визирный канал, предназначенный для визуального обнаружения, выбора, сопровождения цели оператором при условии прямой оптической видимости и наведения оптической оси информационного канала 2 для управляемых объектов, который включает два излучателя - инжекционных лазера 3 с линзами конденсора 4, 5, 6, куб-призму 7 со светочувствительным покрытием по месту склейки призм, плоскопараллельное сканирующее устройство 8 в центре оптической оси 9 информационного канала с диском-прерывателем лазерного излучения лазеров 3, панкратическую систему с линзами 10, 11, которые перемещаются навстречу друг другу и занимают положение 101, 111 и линзы 12, 13 объектива, при этом один из лазеров 3 с линзами 4, 5, 6 конденсора, куб-призма 7 со светочувствительным покрытием по месту склейки призм, плоскопараллельная пластина сканирующего устройства 8 с диском-прерывателем излучения лазера 3, линзы панкратики 10, 11 и линзы 12, 13 объектива образуют оптическую ось 9 информационного канала 2, а другой лазер 3 с линзами 4, 5, 6 конденсора установлен перпендикулярно кубу-призме 7 и оптической оси 9 и образует вторую ветвь информационного канала 9.
Линзы 10, 11 панкратической системы при перемещении друг к другу формируют требуемое поле управления и после полного рабочего цикла возвращаются в исходное положение.
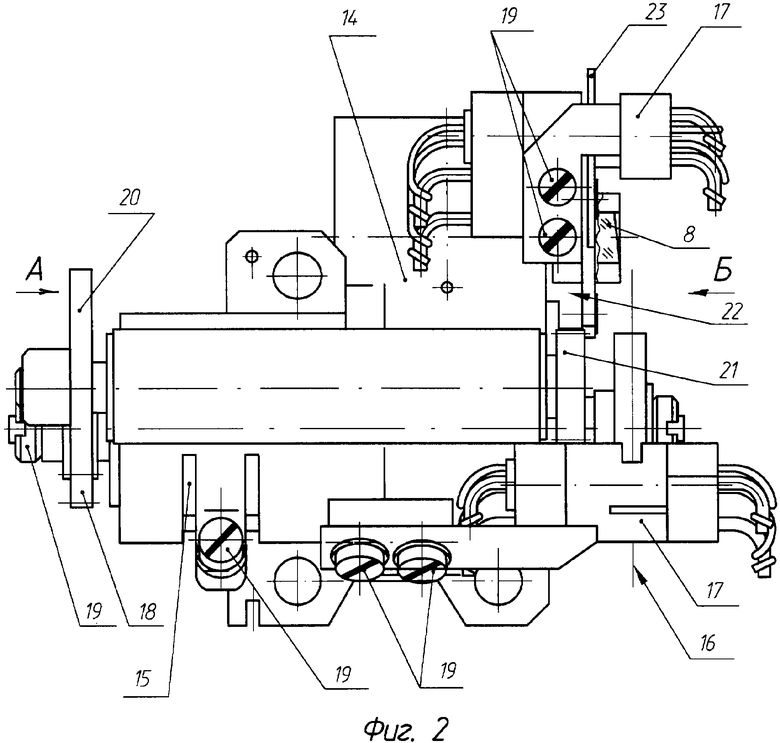
На фиг.2-5 вид А, Б сечение Г-Г представлена конструкция сканирующего устройства излучения лазеров 3 для формирования поля для телеориентирования управляемых объектов, где:
14 - единый корпус, в который установлен электродвигатель 15, кинематически связанный со сканирующим устройством 8 через редуктор. Электродвигатель 15 на валу имеет модулирующий диск 16, служащий стабилизатором скорости двигателя и выдающий кодированную последовательность импульсов, которая поступает на запуск инжекционных лазеров 3 с датчиков свето- и фотодиодов в кронштейнах 17, а противоположно модулирующему диску вал электродвигателя имеет шестерню 18, при этом модулирующий диск 16 и шестерня 18 скреплены с валом электродвигателя крепежным элементом 19. Шестерня 18 контактирует с колесом 20, закрепленным на валу-шестерне 21, которая контактирует с колесом 22 и выполнена в виде втулки с зубчатым фланцем, к торцу которого закреплен диск-прерыватель 23 сканирующего устройства 8, расположенный между свето- и фотодиодами в кронштейнах 17, в который установлена плоскопараллельная пластина сканирующего устройства 8, при этом колесо 22 (его полость) и плоскопараллельная пластина 8 установлены в корпусе 14 соосно оптической оси 9 информационного канала 2, колесо 22 фиксируется в корпусе 14 гайкой 25 (см. фиг.3 вид А и фиг.5 сечение Г-Г). Диск-прерыватель 23 сканирующего устройства 8 выполнен в виде салинона с двумя полуокружностями 26 и 27 разного диаметра, центры которых расположены на одной прямой, а сопряжения полуокружностей прямыми линиями 28, которые взаимодействуют со свето- и фотодиодами, установленными в кронштейнах 17. Сопряжения 28 последовательно включают (выключают) излучение лазеров 3 (см. фиг.4 вид Б).
Вал-шестерня 21 установлена на шарикоподшипниках 29 и распорной втулкой 30 в корпус 14, а колесо 22 сканирующего устройства установлено в шарикоподшипниках 31 с распорными втулками 32, 33. Оптическая ось излучения 9 информационного канала 2 проходит через полость гайки 25, колесо 22 и плоскопараллельную пластину сканирующего устройства 8 (см. фиг.5 сечение Г-Г).
На фиг.6 представлена куб-призма 7 c зеркальным покрытием 34 по месту склейки двух призм 35, образующих призму-куб. Линзы 4, 5, 6 (см. фиг.1) конденсоров формируют увеличенное изображение излучающих "р-п" переходов лазеров на светоделительной грани куб-призмы 7 в виде "креста". А при прохождении через прозрачные тела и отражении от неметаллических поверхностей характер колебаний световых волн изменяется: часть волн естественного света меняет ориентацию и из него выделяются волны, идущие не во всех, а только в некоторых плоскостях. Такой свет называется поляризованным. Если же свет падает на поверхность тела под углом наибольшей поляризации, он поляризуется полностью и тогда из бесчисленного множества плоскостей, в которых распространяется естественный свет, выделяются волны, идущие только в одной плоскости.
На явлении поляризации основано повышение энергетического потенциала для формирования оптического поля для телеориентирования управляемых объектов.
Таким образом, изображенное излучение "креста" с куба-призмы 7 от инжекционных лазеров 3 (см. фиг.1 и фиг.5) проецируется на плоскопараллельную пластину сканирующего устройства 8 через полости колеса 22, гайки 25 и относительно оптической оси 9 системы информационного канала 2 проецируются два взаимно перпендикулярных узких луча, которые осуществляют поэлементное сканирование при вращении пластины поля управления в двух взаимно перпендикулярных направлениях и каждый луч перемещается в направлении, перпендикулярном его длинной стороне.
На фиг.7 и 8 приведена схема сканирования лучей информационных сигналов пластиной сканирующего устройства 8 в направлении, перпендикулярном его длинной стороне относительно оптической оси 9,
где:
36 - информационное поле управления;
37 - изображение "р-п" перехода лазера в плоскости информационного поля управления объектом;
38 - направление сканирования лучей.
На фиг.9-10 представлена кодовая последовательность импульсов лазерного излучения,
где: ТК; ТТ - литерные интервалы по "Z" и "Y"; tК; tТ - временные интервалы по "Z" и "Y";
39 - лазерное излучение по курсу "Z";
40 - лазерное излучение по тангажу "У".
На фиг.11 представлены положения диска-прерывателя 23 сканирующего устройства для кодовой последовательности импульсов лазерного излучения, где сканирующее устройство 8 с диском-прерывателем 23 излучения лазеров с плоскопараллельной пластиной в свето- и фотодиоды 17, которые формируют информационное поле управления 41 с окружностью сканирования 42.
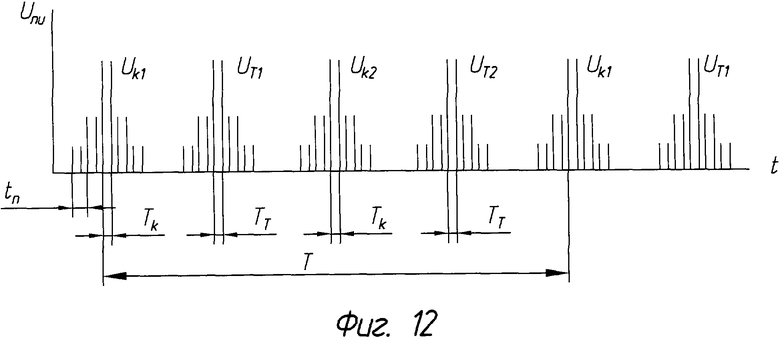
На фиг.12 представлена циклограмма системы развертывающей, где:
Unu - сигналы на выходе приемника излучения;
Uk1; Uk2 - курсовые пачки импульсов;
UТ1; UТ2 - тангажные пачки импульсов;
Тk; ТТ - литерные интервалы соответственно курсовых и тангажных посылок;
tn - временный интервал между парами импульсов в посылках;
Т - период цикла сканирования.
На фиг.13 представлено сканирующее устройство с платой согласования излучения по курсу и тангажу, где работа устройства осуществляется следующим образом.
Оператор при помощи визира 1 наводит информационный канал 2 в нужное направление, после чего воздействует на схему запуска и через нее вырабатывает сигнал, который поступает в программное устройство, которое вырабатывает сигнал на запуск электродвигателя 15, а модулирующий диск 16 со свето- и фотодиодами 17 по достижении стабилизации оборотов двигателя, через блок управления вырабатывает импульсы, которые определяют положение диска-прерывателя 23 с плоскопараллельной пластиной.
По сигналам модулирующего диска 16 блока кодирования в блоке управления вырабатываются сигналы на выходе запуска лазеров 3, которые усиливаются до амплитуд, необходимых для их запуска и через конденсоры две ветки излучателей, проектирующие излучения "р-п" переходы лазеров в виде полосок, направляют последовательно на куб-призму 7 в виде "креста" и направляют на плоскопараллельную пластину, которую сканируют - вращают совместно с диском-прерывателем 23, который, вращаясь, взаимодействует прямыми участками 28 со свето- и фотодиодами 17 и вырабатывает сигнал для блока управления на последовательное включение (отключение) лазерного излучения - происходит сканирование лучей.
Плоскопараллельная пластина вращается вокруг оптической оси 9 системы, описывает окружность 42 с радиусом, равным этому смещению.
Излучение лазеров (курсовое и тангажное) кодируется импульсами с поочередно меняющимися частотами повторения (в соответствии с установленной литерностью). При этом каждому направлению сканирования в режиме 1/4 периода сканирования (справа налево, снизу-вверх) соответствует своя частота повторения импульсов излучения.
Информация о положении аппарата в луче содержится во временном интервале между моментами положения луча соответствующего канала (курса или тангажа) при взаимно противоположных направлениях его сканирования по полю управления.
Сканирующие лучи (по каналам курса и тангажа) при перемещении в поле управления поочередно засвечивают (при совмещении луча приемника управляемого аппарата с лучом системы). Приемник аппарата преобразует полученную информацию в электрический сигнал, представляющий собой четыре пачки импульсов с различными частотами повторения в каждой из них.
Электронная аппаратура управляемого аппарата по частоте повторения импульсов селектирует принятую информацию по курсу и тангажу, а также определяет направление сканирования, в процессе которого поступила каждая из пачек импульсов.
По длительности между пачками, соответствующими определенному каналу и направлению сканирования, определяется линейное отклонение управляемого объекта от центра поля управления, соответствующего линии визирования.
Полученная информация после соответствующей обработки поступает на исполнительные органы летательного аппарата.
Таким образом, предложенное техническое решение для форматирования оптического поля для телеориентирования управляемых объектов позволяет повысить энергетический потенциал системы, упростить конструкцию, улучшить технологичность и имеет явное преимущество перед известными устройствами формирования оптического поля управления для управляемых летательных аппаратов как по своим эксплуатационным, так и по конструктивно-технологическим показателям.
| название | год | авторы | номер документа |
|---|---|---|---|
| ПРИЦЕЛ-ПРИБОР НАВЕДЕНИЯ И СПОСОБ ЮСТИРОВКИ ПАРАЛЛЕЛЬНОСТИ ОПТИЧЕСКИХ ОСЕЙ ИНФОРМАЦИОННОГО И ВИЗИРНОГО КАНАЛОВ | 2003 |
|
RU2249782C2 |
| СПОСОБ ФОРМИРОВАНИЯ ОПТИЧЕСКОГО ПОЛЯ ДЛЯ ТЕЛЕОРИЕНТИРОВАНИЯ УПРАВЛЯЕМЫХ ОБЪЕКТОВ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1996 |
|
RU2100745C1 |
| СПОСОБ ФОРМИРОВАНИЯ ОПТИЧЕСКОГО ПОЛЯ ДЛЯ ТЕЛЕОРИЕНТИРОВАНИЯ УПРАВЛЯЕМЫХ ОБЪЕКТОВ И ОПТИЧЕСКИЙ ПРИЦЕЛ ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2002 |
|
RU2228505C2 |
| ОПТИЧЕСКАЯ СКАНИРУЮЩАЯ СИСТЕМА | 2009 |
|
RU2422864C1 |
| ПРИЦЕЛ-ПРИБОР НАВЕДЕНИЯ | 2000 |
|
RU2188380C2 |
| ОПТИЧЕСКИЙ ПРИЦЕЛ СИСТЕМЫ НАВЕДЕНИЯ УПРАВЛЯЕМОГО СНАРЯДА | 1999 |
|
RU2150073C1 |
| ПРИЦЕЛ-ПРИБОР НАВЕДЕНИЯ И СПОСОБ ЮСТИРОВКИ ПАРАЛЛЕЛЬНОСТИ ОПТИЧЕСКИХ ОСЕЙ ИНФОРМАЦИОННОГО И ВИЗИРНОГО КАНАЛОВ | 2003 |
|
RU2255292C1 |
| Устройство формирования оптического поля для телеориентирования управляемых объектов | 2019 |
|
RU2704675C1 |
| СПОСОБ ФОРМИРОВАНИЯ ОПТИЧЕСКОГО ПОЛЯ ДЛЯ ТЕЛЕОРИЕНТИРОВАНИЯ УПРАВЛЯЕМЫХ ОБЪЕКТОВ, ОПТИЧЕСКИЙ ПРИЦЕЛ СИСТЕМЫ НАВЕДЕНИЯ УПРАВЛЯЕМОГО СНАРЯДА И ФОРМИРОВАТЕЛЬ ИМПУЛЬСОВ | 2006 |
|
RU2313055C1 |
| Оптический прицел системы наведения управляемого объекта (варианты) | 2023 |
|
RU2825201C1 |










Изобретение относится к области дистанционного управления объектами, в частности летательными аппаратами, и предназначено для формирования оптического поля телеориентирования управляемых объектов. Устройство включает визирный канал и соосный ему информационный канал, содержащий две ветви с инжекционным лазером в каждой, а также оптический отклоняющий элемент, объектив, свето- и фотодиоды и сканирующее устройство с приводом. Информационный канал снабжен панкратической системой, а каждая из его ветвей - линзами конденсора, установленными перед инжекционным лазером. Отклоняющий оптический элемент выполнен в виде куба-призмы со светочувствительным покрытием по месту скрепления составляющих его призм. Техническим результатом является повышение энергетического потенциала устройства с постоянным излучением формирования оптического поля телеориентирования управляемых объектов с одновременным упрощением конструкции и улучшением технологичности сканирующего устройства. 13 ил.
Устройство для формирования оптического поля для телеориентирования управляемых объектов, включающее визирный канал и соосный ему информационный канал, содержащий две ветви с инжекционным лазером в каждой, а также оптический отклоняющий элемент, объектив, свето- и фотодиоды и установленное в корпусе сканирующее устройство с приводом, отличающееся тем, что информационный канал снабжен панкратической системой, а каждая из его ветвей - линзами конденсора, установленными перед инжекционным лазером, отклоняющий оптический элемент выполнен в виде куба-призмы со светочувствительным покрытием по месту скрепления составляющих его призм, сканирующее устройство кинематически связано с приводом через редуктор и выполнено в виде диска-прерывателя лазерного излучения с плоскопараллельной пластиной в центре оптической оси информационного канала, установленной в полости колеса редуктора привода сканирующего устройства, при этом колесо выполнено в виде закрепленной в корпусе редуктора втулки с зубчатым фланцем, на торце которого закреплен диск-прерыватель, выполненный в виде салинона с двумя полуокружностями разного диаметра, центры которых находятся на одной прямой с прямыми линиями, сопрягающими полуокружности, свето- и фотодиоды расположены в зоне сопряжений полуокружностей, а на валу привода сканирующего устройства между свето- и фотодиодами размещен модулирующий диск, причем одна ветвь информационного канала с лазером и линзами конденсора, кубом-призмой, сканирующим устройством с диском-прерывателем, линзами панкратической системы и линзами объектива образуют оптическую ось информационного канала, а вторая ветвь с лазером и линзами конденсора установлена перпендикулярно кубу-призме.
| СПОСОБ ФОРМИРОВАНИЯ ОПТИЧЕСКОГО ПОЛЯ ДЛЯ ТЕЛЕОРИЕНТИРОВАНИЯ УПРАВЛЯЕМЫХ ОБЪЕКТОВ И ОПТИЧЕСКИЙ ПРИЦЕЛ ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2002 |
|
RU2228505C2 |
| СПОСОБ ФОРМИРОВАНИЯ ОПТИЧЕСКОГО ПОЛЯ ДЛЯ ТЕЛЕОРИЕНТИРОВАНИЯ УПРАВЛЯЕМЫХ ОБЪЕКТОВ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1996 |
|
RU2100745C1 |
| ОПТИЧЕСКИЙ ПРИЦЕЛ СИСТЕМЫ НАВЕДЕНИЯ УПРАВЛЯЕМОГО СНАРЯДА | 1999 |
|
RU2150073C1 |
| СПОСОБ ОБРАБОТКИ ПРИЗАБОЙНОЙ ЗОНЫ СКВАЖИНЫ | 1998 |
|
RU2135761C1 |
| Станция орбитальная заправочная криогенная | 2019 |
|
RU2729748C1 |

