Изобретение относится к оптическим системам наведения управляемых снарядов и может быть использовано в системах управляемого оружия с телеориентацией в луче лазера.
В настоящее время известен способ формирования оптического поля для телеориентирования управляемых объектов, преимущественно управляемых летательных аппаратов [1], включающий излучение оптического потока и заполнение им зоны в окрестностях оптической оси визира путем ее сканирования плоскими лучами, причем лучи отклоняют со взаимным сдвигом по времени вдоль взаимно перпендикулярных координатных осей, перпендикулярных плоскостям лучей, а излучение производят посылками, каждая из которых состоит из двух импульсов, интервал времени между которыми постоянен для каждого из лучей и имеет свое значение для каждого луча, при этом интервалы времени между посылками для каждого из лучей изменяют при отклонении луча от оптической оси визира, а знак отклонения указанных интервалов времени от опорных значений, соответствующих нулевым значениям координат, изменяют при переходе лучом направления, совпадающего с оптической осью визира.
В настоящее время известно устройство для формирования оптического поля для телеориентирования управляемых объектов [1], содержащее установленные соосно визир и прожектор, выполненные в виде как минимум одной пары аналогичных ветвей, каждая из которых содержит схему запуска, а также последовательно установленные инжекционный лазер, отклоняющий оптический элемент и объектив, при этом лазер установлен вблизи фокальной плоскости системы, образуемой объективом и отклоняющим оптическим элементом, излучающие области лазеров установлены перпендикулярно осям измеряемых координат, отклоняющие оптические элементы выполнены в виде цилиндрических линз, закрепленных в общей рамке, установленной на коленчатых валиках с возможностью плоскопараллельного движения по окружности, при этом оси цилиндрических поверхностей линз параллельны излучающим областям лазеров, входы схем запуска соединены с выходами формирователя импульсов, входы которых подсоединены к выходам блока модуляции, входы которого соединены с приводом рамки и первым выходом программного устройства, выходы схем запуска соединены с лазером, второй выход программного устройства соединен с приводом рамки.
Недостатком такого способа является то, что в нем не определены пределы заполняемой оптическим потоком зоны в окрестностях направления, совпадающего с оптической осью визира. При этом в случае, если телеориентирование управляемого объекта производится в условиях, когда расстояние между оптической осью визира и подстилающей поверхностью меньше размера зоны, заполняемой оптическим потоком, возможно возникновение помех в формируемом оптическом поле. Данный недостаток проявляется в известном устройстве, когда при управлении снарядом в большом диапазоне полетных дальностей за счет фиксированной расходимости ветвей прожектора создаются предпосылки отражения нижней части луча наведения от подстилающей поверхности, особенно если наведение осуществляется над водой. При этом отраженное излучение может попадать в приемник управляемого объекта, что вызовет выделение ложных координат, соответствующих нижней части луча наведения, и приведет к срыву управления.
Частично этот недостаток устраняется в наиболее близком по технической сущности к предполагаемому изобретению оптическом прицеле [2], содержащем установленные соосно визир и прожектор, включающий в себя два инжекционных лазера, излучающие области которых расположены перпендикулярно осям измеряемых координат, систему вывода излучения лазеров на единую оптическую ось, последовательно установленные на этой оси оптический сканер в виде вращающейся призмы и панкратический объектив, при этом ось вращения призмы совмещена с оптической осью объектива, а также непрозрачную шторку, установленную на оправу вращающейся призмы, два оптронных датчика, две схемы задержки и формирователь импульсов, при этом шторка выполнена в виде непрозрачного сектора с углом разворота 180°, стороны которого проходят через ось вращения призмы и развернуты относительно плоскости наклона граней призмы на угол α в направлении вращения сканера, а радиус сектора обеспечивает перекрытие осей оптронных датчиков, установленных неподвижно параллельно одной из измеряемых координат, причем в плоскости, перпендикулярной оптической оси прожектора, угол между линиями, соединяющими каждый из датчиков с осью вращения призмы, составляет 90°, при этом выходы первого и второго оптронных датчиков подключены соответственно ко входам первой и второй схем задержки, выходы которых подключены соответственно к первому и второму входам формирователя импульсов, первый и второй выходы которого подключены соответственно к входам первого и второго лазеров, а схемы задержки имеют возможность регулировки времени задержки в диапазоне от 0 до Тα/π, где Т - период вращения призмы; α - угол между плоскостью наклона граней призмы и сторонами непрозрачного сектора, при этом формирователь импульсов содержит опорный генератор, схему ИСКЛЮЧАЮЩЕЕ ИЛИ, счетчик времени, постоянное запоминающее устройство (ПЗУ), преобразователь код - время и коммутатор каналов, первый и второй вход схемы ИСКЛЮЧАЮЩЕЕ ИЛИ, а также первый и второй входы ПЗУ подключены соответственно к первым и вторым входам формирователя импульсов, выход схемы ИСКЛЮЧАЮЩЕЕ ИЛИ подключен к первым входам счетчика времени и коммутатора каналов, выход счетчика времени подключен к третьему входу ПЗУ, выход которого подключен ко входу преобразователя код - время, выход которого подключен ко второму входу коммутатора каналов, первый и второй выходы которого подключены соответственно к первому и второму выходам формирователя импульсов, при этом вторые входы счетчика времени и преобразователя код - время подключены к выходу опорного генератора.
В данном прицеле используется панкратический объектив, программное изменение фокального отрезка которого обеспечивает постоянный размер оптического поля на дальности управляемого объекта (уменьшает расходимость луча наведения на выходе прожектора пропорционально дальности до объекта). При этом существенно уменьшается вероятность и длительность попадания отраженного от подстилающей поверхности излучения в приемник управляемого объекта. Однако при использовании оптического прицела на объектах (например, выносных пусковых установках), в которых ось луча наведения находится в непосредственной близости от подстилающей поверхности, полностью исключить возможность попадания переотраженного излучения в приемник управляемого объекта невозможно.
Задачей предполагаемого изобретения является повышение точности выделения координат управляемого объекта за счет исключения возможных отражений луча наведения от подстилающей поверхности.
Поставленная цель достигается тем, что при способе формирования оптического поля для телеориентирования управляемых объектов, преимущественно управляемых летательных аппаратов, включающий излучение оптического потока и заполнение им зоны в окрестностях оптической оси визира путем ее сканирования плоскими лучами, причем лучи отклоняют со взаимным сдвигом по времени вдоль взаимно перпендикулярных координатных осей, перпендикулярных плоскостям лучей, а излучение производят посылками, каждая из которых состоит из двух импульсов, интервал времени между которыми постоянен для каждого из лучей и имеет свое значение для каждого луча, при этом интервалы времени между посылками для каждого из лучей изменяют при отклонении луча от оптической оси визира, а знак отклонения указанных интервалов времени от опорных значений, соответствующих нулевым значениям координат, изменяют при переходе лучом направления, совпадающего с оптической осью визира, для горизонтального плоского луча прекращают производство посылок при его угловом отклонении вниз от направления, совпадающего с оптической осью визира, на величину более  где h - расстояние между оптической осью визира и подстилающей поверхностью, а Д - текущая дальность управляемого объекта.
где h - расстояние между оптической осью визира и подстилающей поверхностью, а Д - текущая дальность управляемого объекта.
Поставленная цель достигается тем, что в оптический прицел системы наведения, содержащий установленные соосно визир и прожектор, включающий в себя два инжекционных лазера, излучающие области которых расположены перпендикулярно осям измеряемых координат, систему вывода излучения лазеров на единую оптическую ось, последовательно установленные на этой оси оптический сканер в виде вращающейся призмы и панкратический объектив, при этом ось вращения призмы совмещена с оптической осью объектива, а также непрозрачную шторку, установленную на оправу вращающейся призмы, два оптронных датчика, две схемы задержки и формирователь импульсов, при этом шторка выполнена в виде непрозрачного сектора с углом разворота 180°, стороны которого проходят через ось вращения призмы и развернуты относительно плоскости наклона граней призмы на угол α в направлении вращения сканера, а радиус сектора обеспечивает перекрытие осей оптронных датчиков, установленных неподвижно параллельно одной из измеряемых координат, причем в плоскости, перпендикулярной оптической оси прожектора, угол между линиями, соединяющими каждый из датчиков с осью вращения призмы, составляет 90°, при этом выходы первого и второго оптронных датчиков подключены соответственно ко входам первой и второй схем задержки, выходы которых подключены соответственно к первому и второму входам формирователя импульсов, первый и второй выходы которого подключены соответственно к входам первого и второго лазеров, а схемы задержки имеют возможность регулировки времени задержки в диапазоне от 0 до Тα/π, где Т - период вращения призмы; α - угол между плоскостью наклона граней призмы и сторонами непрозрачного сектора, при этом формирователь импульсов содержит опорный генератор, схему ИСКЛЮЧАЮЩЕЕ ИЛИ, счетчик времени, постоянное запоминающее устройство (ПЗУ), преобразователь код - время и коммутатор каналов, первый и второй вход схемы ИСКЛЮЧАЮЩЕЕ ИЛИ, а также первый и второй входы ПЗУ подключены соответственно к первым и вторым входам формирователя импульсов, выход схемы ИСКЛЮЧАЮЩЕЕ ИЛИ подключен к первым входам счетчика времени и коммутатора каналов, выход счетчика времени подключен к третьему входу ПЗУ, выход которого подключен ко входу преобразователя код - время, выход которого подключен ко второму входу коммутатора каналов, первый и второй выходы которого подключены соответственно к первому и второму выходам формирователя импульсов, при этом вторые входы счетчика времени и преобразователя код - время подключены к выходу опорного генератора, введены дешифратор сигналов и элемент И, причем первый и второй входы дешифратора сигналов соединены соответственно с выходами первой и второй схем задержек, а третий вход дешифратора сигналов соединен с выходом счетчика времени, а выход - с первым входом элемента И, второй вход которого подключен к выходу преобразователя код-время, а выход элемента И соединен со вторым входом коммутатора сигналов.
Введение в способ формирования поля управления новой операции - прекращение производства посылок для горизонтального луча при его отклонении вниз от направления, совпадающего с оптической осью визира, на величину h на текущей дальности управляемого объекта - исключает оптический контакт луча с подстилающей поверхностью и, следовательно, устраняет возможность его отражения.
Таким образом, данный новый признак формулы способа находится в причинно-следственной связи с достигаемым техническим результатом.
Введение в устройство прицела новых элементов - дешифратора сигнала и элемента И, а также новых связей позволяет сформировать импульсы гашения (дешифратором) при указанном в способе отклонении горизонтального луча от оси визирного канала и с помощью этих импульсов прекращать производство посылок (элемент И) при этих углах, то есть реализовывать новую операцию, указанную в формуле способа.
Таким образом, данные новые признаки формулы устройства напрямую связаны с новыми признаками способа и находятся в причинно-следственной связи с достигаемым техническим результатом.
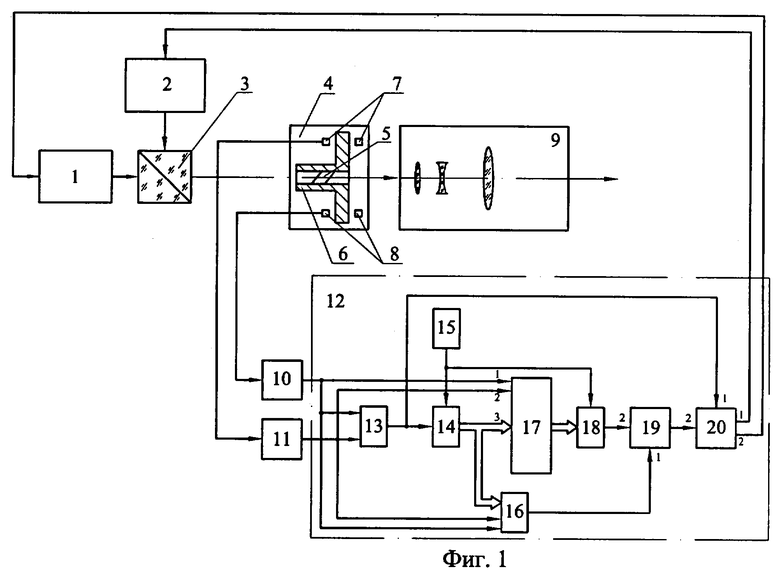
На фиг.1 приведена структурная схема прожектора.
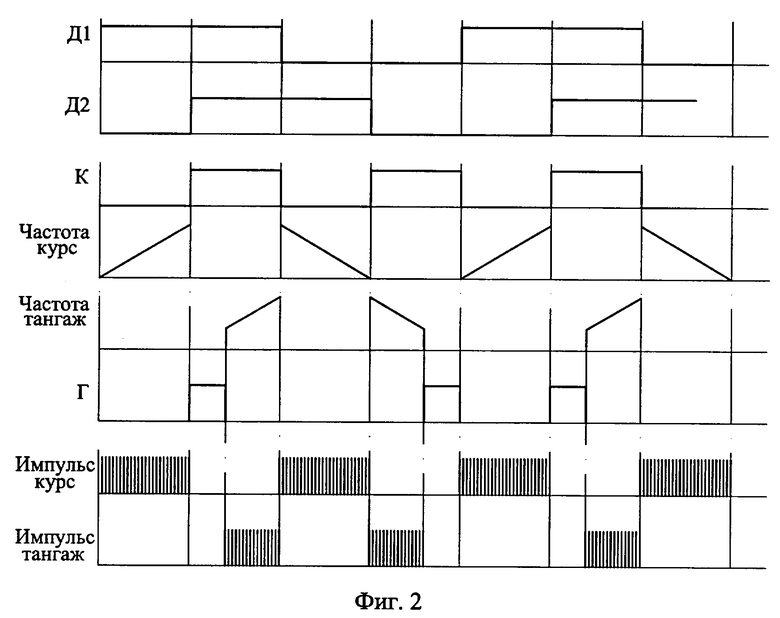
На фиг.2 представлены эпюры сигналов на одном цикле сканирования.
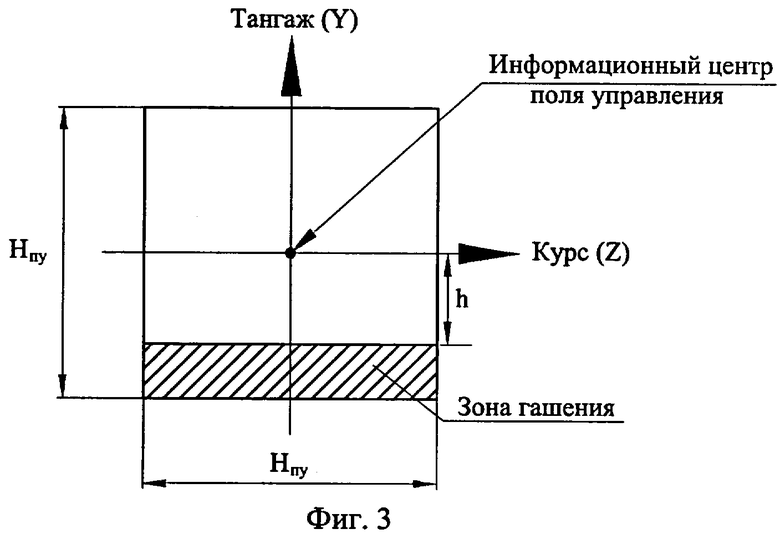
На фиг.3 представлена форма поля управления.
Примером реализации служит прожектор (фиг.1), содержащий два инжекционных лазера 1 и 2, систему вывода излучения лазеров на единую оптическую ось, выполненную в виде поляризационного кубика 3, оптический сканер 4, состоящий из вращающейся призмы 5, на оправу которой установлена шторка, выполненная в виде непрозрачного полудиска 6, двух неподвижных оптронных датчиков 7 и 8, панкратического объектива 9, двух схем задержки 10 и 11 и формирователя импульсов 12, содержащего схему ИСКЛЮЧАЮЩЕЕ ИЛИ 13, счетчик времени 14, опорный генератор 15, дешифратор 16, постоянное запоминающее устройство 17, преобразователь код - время 18, схему И 19 и коммутатор каналов 20.
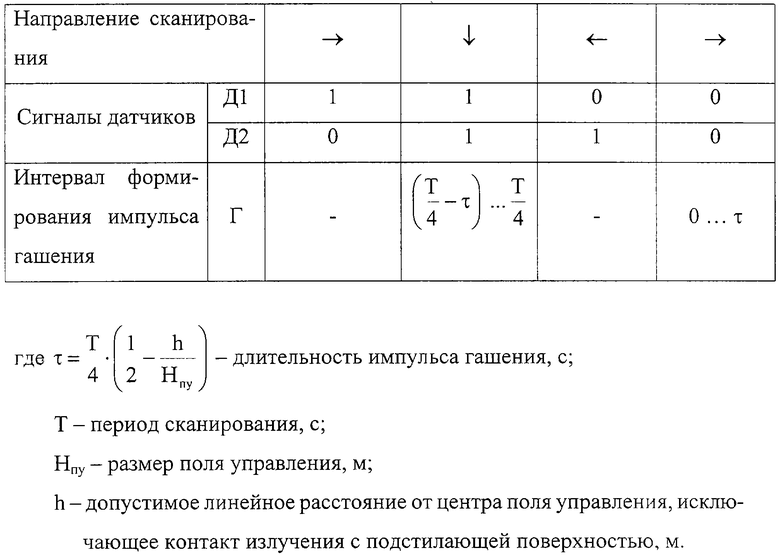
Представленный прожектор работает следующим образом. Вращающаяся призма 5 совершает нутационное сканирование плоскими лучами лазеров 1 и 2 по формируемому полю, радиус которого на дальности управляемого снаряда поддерживается постоянным за счет изменения фокусного расстояния панкратического объектива 9. При этом в ходе вращения призмы 5 полудиск 6 производит последовательное прерывание в оптронных датчиках 7 и 8, сигналы на выходах которых после прохождения схем задержки 10 и 11 соответственно Д1 и Д2 представлены на фиг.2. Комбинация сигналов Д1 и Д2 определяет направление сканирования каждого плоского луча по формируемому полю. Данные сигналы поступают на вход формирователя импульсов 12, где поступают на адресные входы ПЗУ 17 и входы схемы ИСКЛЮЧАЮЩЕЕ ИЛИ 13, на выходе которой формируется сигнал "К" (см. фиг.2), состояние "1" которого соответствует работе канала ТАНГАЖ (сканирование по вертикальной координате), а состояние "0" - работе канала КУРС (сканирование по горизонтальной координате). От момента каждой смены состояния сигнала "К" счетчик времени 14 синхронно с частотой опорного генератора 15 формирует на своем выходе код, пропорциональный текущему времени, который подается на соответствующие адресные входы ПЗУ 17. В зависимости от состояния адресных входов ПЗУ 17 формирует на своем выходе код, в соответствии с которым преобразователь код - время 18 формирует парные импульсы, временной интервал между импульсами в паре при этом соответствует текущему каналу сканирования, а частота повторения посылок линейно меняется во времени, начиная с момента возникновения соответствующей комбинации сигналов Д1 и Д2 (смены состояния сигнала "К").Одновременно с этим код с выхода счетчика времени 14 и сигналы Д1 и Д2 с входов формирователя импульсов 12 поступают на входы дешифратора 16, на выходе которого формируются импульсы гашения излучения в канале ТАНГАЖА, сканирующего по вертикальной оси - сигнал "Г" (фиг.2), например, в соответствии с данными таблицы. При наличии сигнала гашения, поступающего на схему И 19, обеспечивается прерывание поступления импульсов на вход коммутатора каналов 20 и соответственно на вход лазера 2, обеспечивающего кодирование поля по вертикальной оси. При этом в канале КУРС гашение отсутствует и излучение формируется полностью в течение каждого такта горизонтального сканирования (сигнал "К"=0).
Таким образом, при сканировании по вертикали лазерное поле управления будет формироваться только на величину h ниже его информационного центра. Величина h выбирается исходя из высоты оси луча наведения над подстилающей поверхностью (типа носителя, на котором устанавливается оптический прицел). Типовое значение для выносных пусковых установок с оптическими прицелами для наведения управляемого снаряда может составлять порядка 1 м.
Это позволяет исключить возможные отражения излучения прожектора в канале ТАНГАЖ от подстилающей поверхности, что значительно повышает точность выделения координат управляемого объекта (особенно при наведении над водной поверхностью), что является задачей предлагаемого технического решения.
Источники информации:
1. Патент РФ №2100745, МКИ F 41 G 7/26 от 02.07.1996 г.
2. Патент РФ №2150073, МКИ F 41 G 7/26 от 07.06.1999 г.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ФОРМИРОВАНИЯ ОПТИЧЕСКОГО ПОЛЯ ДЛЯ ТЕЛЕОРИЕНТИРОВАНИЯ УПРАВЛЯЕМЫХ ОБЪЕКТОВ, ОПТИЧЕСКИЙ ПРИЦЕЛ СИСТЕМЫ НАВЕДЕНИЯ УПРАВЛЯЕМОГО СНАРЯДА И ФОРМИРОВАТЕЛЬ ИМПУЛЬСОВ | 2006 |
|
RU2313055C1 |
| ОПТИЧЕСКИЙ ПРИЦЕЛ СИСТЕМЫ НАВЕДЕНИЯ УПРАВЛЯЕМОГО СНАРЯДА | 1999 |
|
RU2150073C1 |
| ОПТИЧЕСКИЙ ПРИЦЕЛ СИСТЕМЫ НАВЕДЕНИЯ УПРАВЛЯЕМОГО СНАРЯДА | 2004 |
|
RU2280224C1 |
| ОПТИЧЕСКИЙ ПРИЦЕЛ СИСТЕМЫ НАВЕДЕНИЯ УПРАВЛЯЕМОГО СНАРЯДА | 2002 |
|
RU2234661C1 |
| ОПТИЧЕСКИЙ ПРИЦЕЛ СИСТЕМЫ НАВЕДЕНИЯ УПРАВЛЯЕМОГО СНАРЯДА | 2003 |
|
RU2260764C2 |
| ОПТИЧЕСКИЙ ПРИЦЕЛ СИСТЕМЫ НАВЕДЕНИЯ УПРАВЛЯЕМОГО СНАРЯДА | 2003 |
|
RU2260763C2 |
| Оптический прицел системы наведения управляемого снаряда (варианты) | 2016 |
|
RU2623687C1 |
| ОПТИЧЕСКИЙ ПРИЦЕЛ СИСТЕМЫ НАВЕДЕНИЯ УПРАВЛЯЕМОГО СНАРЯДА | 2004 |
|
RU2257524C1 |
| Оптический прицел системы наведения управляемого объекта (варианты) | 2023 |
|
RU2825201C1 |
| Устройство формирования оптического поля для телеориентирования управляемых объектов | 2019 |
|
RU2704675C1 |
Изобретение относится к оптическим системам наведения управляемых снарядов и может быть использовано в системах управляемого оружия с телеориентацией в луче лазера. Техническим результатом изобретения является повышение точности выделения координат управляемого объекта при формировании оптического поля управления за счет исключения отражений луча наведения от подстилающей поверхности. Согласно изобретению, формирование оптического поля осуществляется заполнением зоны в окрестности оси оптическим потоком, причем заполнение производят путем ее сканирования плоскими (ножевидными) лучами, отклоняемыми со взаимным сдвигом по времени вдоль взаимно перпендикулярных координатных осей, перпендикулярных плоскостям лучей, а излучение производят посылками, каждая из которых состоит из двух импульсов, интервал времени между которыми постоянен для каждого из лучей и имеет свое значение для каждого луча, при этом интервалы времени между посылками для каждого из лучей изменяют при отклонении луча от оптической оси визира, а знак отклонения указанных интервалов времени от опорных значений, соответствующих нулевым значениям координат, изменяют при переходе лучом направления, совпадающего с оптической осью визира, а для горизонтального плоского луча прекращают производство посылок при его угловом отклонении вниз от направления, совпадающего с оптической осью визира, на величину более α=arctg(h/Д), где h - расстояние между оптической осью визира и подстилающей поверхностью, а Д - текущая дальность управляемого объекта. При этом в формирователь импульсов оптического прицела, содержащий опорный генератор, схему ИСКЛЮЧАЮЩЕЕ ИЛИ, счетчик времени, постоянное запоминающее устройство, преобразователь код - время и коммутатор каналов, дополнительно введены дешифратор и схема И, при этом первый и второй входы дешифратора подключены к первому и второму входам формирователя импульсов, третий вход дешифратора соединен с выходом счетчика импульсов, выход дешифратора подключен к первому входу схемы И, второй вход которой подключен к выходу преобразователя код - время, а выход - ко входу коммутатора каналов. 2 с.п.ф-лы, 3 ил., 1 табл.
| ОПТИЧЕСКИЙ ПРИЦЕЛ СИСТЕМЫ НАВЕДЕНИЯ УПРАВЛЯЕМОГО СНАРЯДА | 1999 |
|
RU2150073C1 |
| СПОСОБ ФОРМИРОВАНИЯ ОПТИЧЕСКОГО ПОЛЯ ДЛЯ ТЕЛЕОРИЕНТИРОВАНИЯ УПРАВЛЯЕМЫХ ОБЪЕКТОВ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1996 |
|
RU2100745C1 |
| US 4111385, 05.09.1978 | |||
| СПОСОБ ОБРАБОТКИ ПРИЗАБОЙНОЙ ЗОНЫ СКВАЖИНЫ | 1998 |
|
RU2135761C1 |
| Станция орбитальная заправочная криогенная | 2019 |
|
RU2729748C1 |

