Способ контроля стрельбы зенитной самоходной установки контрольной парой радиолокаторов (КПР) с отворотом по воздушной цели без поражения летательного аппарата.
Способ относится к контролю стрельбы по воздушной цели без поражения летательного аппарата в ходе тактических учений с боевой стрельбой.
Известен способ контроля стрельбы зенитных артиллерийских комплексов (ЗАК) с азимутальным отворотом по воздушной цели без поражения летательного аппарата [1], который применялся для контроля стрельб 100-, 85-, 57-миллиметровых зенитных орудий, суть которого сводилась к просмотру наблюдателем через трубу зенитную командирскую (ТЗК) и поворачивающееся зеркало разрывающихся снарядов на фоне цели.
Однако этот способ обладает существенными недостатками: на точность выставления оценки влияли погодные условия и субъективные факторы, что сделало его неприемлемым для контроля стрельбы ЗСУ 2С6.
Также известен способ контроля стрельбы ЗАК с зеркальным отворотом (ЗО) по воздушной цели без поражения летательного аппарата применяемыми для ЗСУ-23-4 [2], принцип которого заключается в следующем.
На зеркальной плоскости находятся контрольная пара радиолокаторов (КПР) и стреляющие ЗАК (фиг. 1), работающие в режиме зеркального отворота, т.е. антенна станции сопровождения цели (ССЦ) ЗАК сопровождает воздушную цель (направлена в точку A), а стволы развернуты симметрично относительно зеркальной плоскости и направлены в точку прохождения трассы снарядов (в точку B). Ведущая и ведомая радиолокационные станции (РЛС) КПР работают также в режиме зеркального отворота. Антенна ведущей РЛС сопровождает воздушную цель (направлена в точку A), а антенна ведомой РЛС развернута симметрично зеркальной плоскости и направлена в точку фиктивной воздушной цели для контроля прохождения трассы снарядов при стрельбе. По отклонению трассы снарядов от равносигнального направления антенны ведомой РЛС КПР определяется оценка стреляющим ЗАК.
Недостатком этого способа, ввиду снятия с вооружения ЗСУ-23-4 и приходом на замену ей ЗСУ 2С6, является невозможность его реализации в настоящее время в связи с отсутствием режима работы с ЗО и невозможностью его реализации из-за конструктивных особенностей данного комплекса.
Целью изобретения является приспособление полигонов и учебных секторов стрельбы, оснащенных КПР, для контроля стрельб ЗСУ типа 2С6 в ходе тактических учений.
Для достижения этой цели предложен способ контроля стрельбы с азимутальным отворотом, при котором отворачивают на определенный угол (60 - 72o) стволы ЗСУ 2С6 относительно антенны ССЦ, а также антенну ведомого локатора КПР относительно ведущего.
При реализации этого способа возникает проблема учета поправок на параллакс по трем координатам, которые вычисляются на основании приведенных в описании формул (1, 2, 3 и 4) и зависят от координат цели и расстояния между КПР и стреляющей ЗСУ.
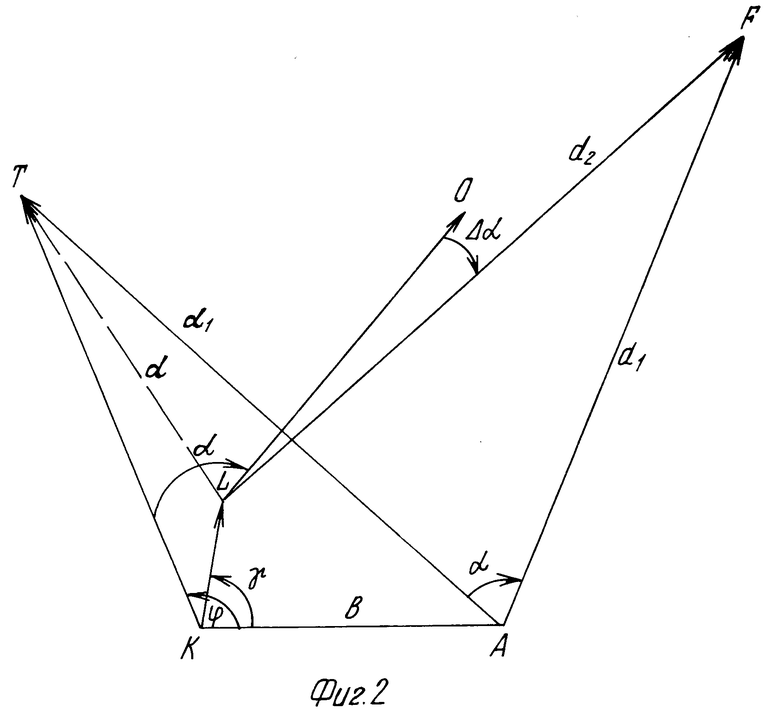
Принцип контроля стрельб с азимутальным отворотом заключается в том, что на некотором расстоянии, называемом базой и определяемом правилами техники безопасности в пределах 50 - 250 м, расположены КПР и ЗСУ 2С6. Стволы ЗСУ 2С6 отвернуты в горизонтальной плоскости относительно ССЦ на постоянный угол α . Ведомая РЛС КПР отвернута относительной ведущей на этот же угол (фиг. 2). Из фиг. 2 видно, а также проведенные расчеты показатели, что контроль результатов стрельбы при стрельбе с азимутальным отворотом по воздушной цели без поражения летательного аппарата с помощью имеющихся в зенитных артиллерийских учебных центрах (секторах стрельбы) войск ПВО СВ контрольных пар радиолокаторов требует учета поправок параллакса при наведении ведомого локатора КПР в точку фиктивной воздушной цели по трем координатам. На фиг. 2 изображена векторная диаграмма, иллюстрирующая ситуацию контроля стрельбы зенитных автоматов ЗПРК 2С6 с азимутальным отворотом в горизонтальной плоскости с использованием КПР.
На диаграмме приняты следующие обозначения:
F - проекция точки фиктивной цели на горизонтальную плоскость;
L - точка расположения антенны ведомой РЛС КПР;
K - точка расположения антенны ведущей РЛС КПР;
A - точка расположения стреляющей ЗСУ;
T - проекция реальной цели на горизонтальную плоскость;
O - проекция точки наведения ведомой РЛС КПР на горизонтальную плоскость без учета поправок на параллакс;
α - угол постоянного рассогласования по азимуту между антенной ССЦ и стволами зенитных автоматов (продольной осью башни) ЗСУ, а также между электрическими осями антенн ведущей и ведомой РЛС КПР;
ϕ - угол между линией КПР - ЗСУ и направлением ведущей РЛС КПР на проекцию цели на горизонтальную плоскость;
b - расстояние между КПР и ЗСУ;
c - расстояние между антеннами ведущей и ведомой РЛС КПР;
d - горизонтальная дальность до цели от ведущей РЛС КПР;
d1 - горизонтальная дальность до точки фиктивной цели от ЗСУ;
d2 - горизонтальная дальность до точки фиктивной цели от ведомой РЛС КПР;
Δd - поправка в наведение по горизонтальной дальности ведомой РЛС КПР на точку фиктивной цели;
Δα - азимутальная поправка в наведение ведомой РЛС КПР на точку фиктивной цели;
γ - угол между линией КПР - ЗСУ и линией соединяющей антенны ведущей и ведомой РЛС КПР.
Поправка в наведение ведомой РЛС КПР по азимуту представляется в виде
Учитывая, что  соответствующие векторы представляются в комплексной форме
соответствующие векторы представляются в комплексной форме
тогда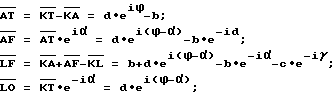
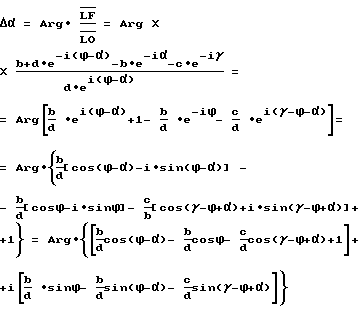
Выражение для расчета поправки в наведение ведомой РЛС по азимуту имеет вид
Горизонтальная дальность наведения ведомой РЛС на точку фиктивной цели (фиг. 2) изображена вектором  и равна модулю этого вектора
и равна модулю этого вектора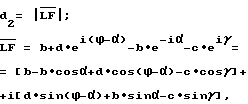
учитывая, что c<<d получают
после преобразования
откуда
Выражение для расчета поправки в наведение ведомой РЛС КПР в точку фиктивной цели по углу места выводится с использованием следующих данных:
высота точки фиктивной цели равна высоте реальной цели;
горизонтальная дальность от КПР до точки фиктивной цели равна d2 (фиг. 2);
горизонтальная дальность от КПР до реальной цели равна d2 (фиг. 2);
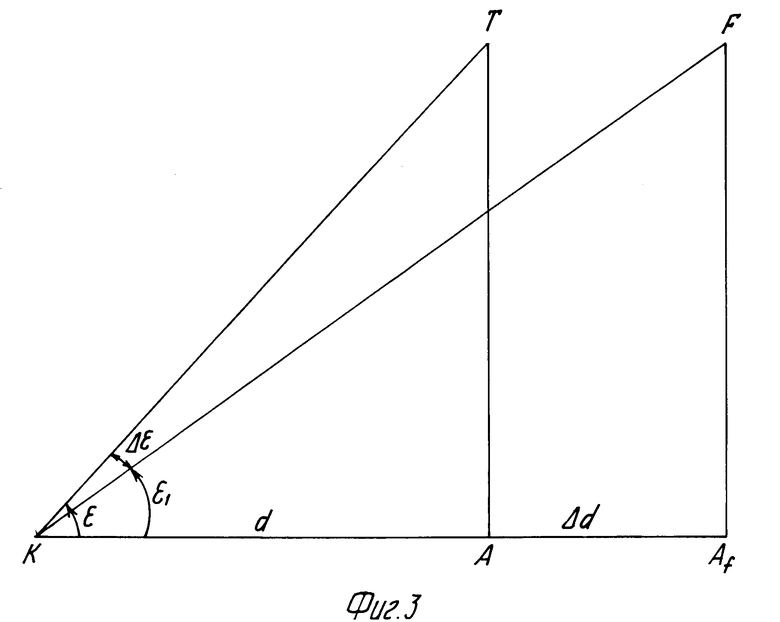
угол места реальной цепи, измеренный ведущей РЛС КПР, равен ε (фиг. 3).
На фиг. 3 приняты следующие обозначения:
T - положение реальной цели;
F - положение точки фиктивной цели;
K - положение КПР;
A, Af - проекции реальной и точки фиктивной целей на горизонтальную плоскость;
ε - угол места реальной цели;
ε1 - угол места точки фиктивной цели;
Δε - поправка в наведение ведомой РЛС КПР в точку фиктивной цели.
Выражая высоты реальной и точки фиктивной целей через координаты, измеренные ведущей и установленной для ведомой РЛС КПР, получают следующие уравнения: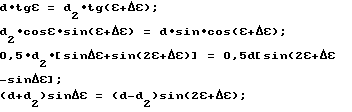
учитывают что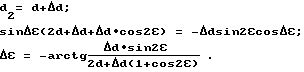
Таким образом, алгоритм вычисления поправок и наведение ведомой РЛС КПР в точку фиктивной цели описывают выражениями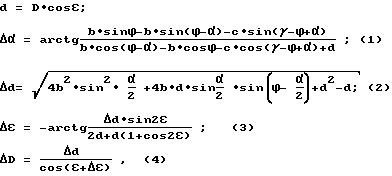
где
D - наклонная дальность до реальной цели, измеренная ведущей РЛС КПР;
ΔD - поправка в наведении дальномера ведомой РЛС КПР в точку фиктивной цели.
Для того чтобы снаряд, выпущенный из ствола автомата контролируемой ЗСУ, попал в луч ведомой РЛС, его доварачивают по азимуту и углу места и корректируют по дальности на величины поправок.
Использованные источники:
1. ЗСУ-23-4М. Инструкция по эксплуатации 2А6М.00 ИЭ Часть 1 - М.: Воениздат, 1980, 77 с.
2. Правила стрельбы и боевой работы на зенитных артиллерийских комплексах войск ПВО СВ часть 6. Взвод зенитных самоходных установок ЗСУ-23-4. -М.: Воениздат, 1975, 214 с.
3. Руководство по службе учебных центров сухопутных войск. - М.: МО СССР, 1977, 169 с.
4. Воднеев В. Т. и др. Основные математические формулы. - Мн.: Высшая школа, 1980. 336 с.
Изобретение относится к контролю стрельбы отвернутым способом по воздушным целям на тактических учениях. Сущность изобретения: проведение стрельбы зенитными автоматами ЗСУ типа 2С6 с азимутальным отворотом по воздушной цели без поражения летательного аппарата предполагает наличие постоянного рассогласования между осью антенны ССЦ и стволами зенитных автоматов (продольной осью башни) на постоянный угол α. Контроль результатов таких стрелью с помощью имеющихся в зенитных артиллерийских учебных центрах (секторах стрельбы) войск ПВО СВ контрольных пар радиолокаторов (КПР) требует учета поправок на параллакс при наведении ведомой радиолокационной станции (РСЛ) на точку фиктивной цели по трем координатам: азимуту, углу места и дальности, что не требовалось при зеркальном отвороте. 3 ил.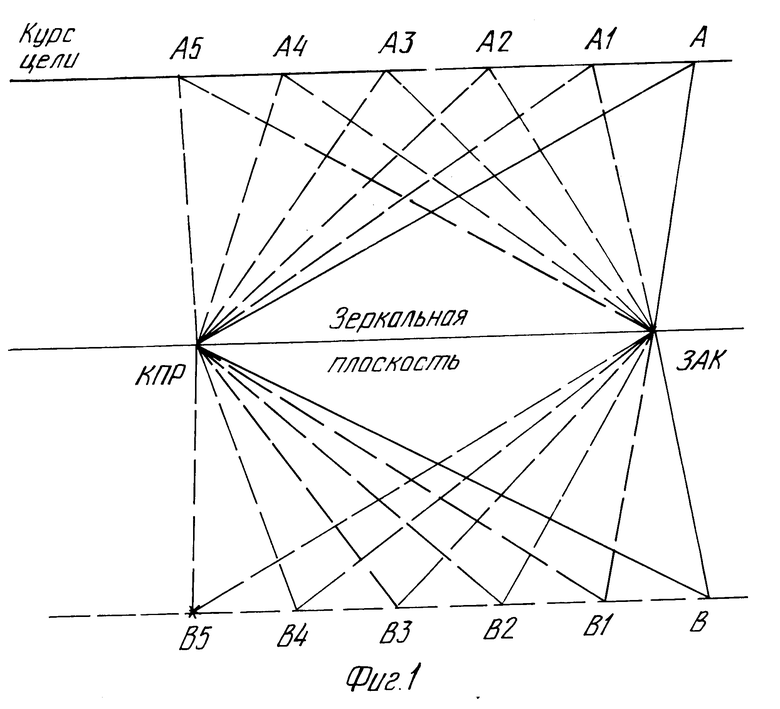
Способ контроля стрельбы зенитной самоходной установки контрольной парой радиолокаторов с отворотом по воздушной цели без поражения летательного аппарата, отличающийся тем, что стволы зенитной самоходной установки относительно антенны станции сопровождения цели и антенну ведомого локатора контрольной пары радиолокаторов относительно ведущего отворачивают в азимутальной плоскости, определяют поправки на параллакс в соответствии со следующими зависимостями:

где Δα - поправка в наведении ведомого локатора по азимуту;
Δε - поправка в наведении ведомой радиолокационной станции по углу места;
ΔD - поправка в наведении ведомой радиолокационной станции по дальности;
b - расстояние между контрольной парой радиолокаторов и зенитной самоходной установкой;
с - расстояние между антеннами ведущей и ведомой радиолокационными станциями контрольной пары радиолокаторов;
d - горизонтальная дальность до цели от ведущей радиолокационной станции контрольной пары радиолокаторов;
ϕ - угол между линией контрольная пара радиолокаторов - зенитная самоходная установка и направлением ведущей радиолокационной станции контрольной пары радиолокаторов на проекцию цели на горизонтальную плоскость,
α - угол постоянного рассогласования по азимуту между антенной станции сопровождения цели и стволами зенитных автоматов зенитной самоходной установки, а также между электрическими осями антенн ведущей и ведомой радиолокационными станциями контрольной пары радиолокаторов;
γ - угол между линией контрольная пара радиолокаторов - зенитная самоходная установка и линией, соединяющей антенны ведущей и ведомой радиолокационных станций контрольной пары радиолокаторов;
Δd - поправка в наведении по горизонтальной дальности ведомой радиолокационной станции контрольной пары радиолокаторов на точку фиктивной цели;
ε - угол места реальной цели,
и с учетом поправок автоматически доворачивают антенну в направлении цели.
| Правила стрельбы и боевой работы на зенитных артиллерийских комплексах войск ПВО СВ, часть 6 | |||
| Прибор для равномерного смешения зерна и одновременного отбирания нескольких одинаковых по объему проб | 1921 |
|
SU23A1 |
| - М.: Воениздат, 1975, с | |||
| Способ обработки грубых шерстей на различных аппаратах для мериносовой шерсти | 1920 |
|
SU113A1 |
