Изобретение относится к системе для индикации положений движущихся объектов, которая позволяет совокупности движущихся объектов или станций осуществлять слежение друг за другом и центральной станции или ряду центральных станций осуществлять слежение за положениями индивидуального и/или всех членов этой совокупности.
Системы для определения положения хорошо известны уже в течение долгого времени, например, система DECCA, система LORAN, система VLF OMEGA, NDB, VOR и DME. Для использования на центральных станциях известны различные типы радарных систем, такие как радар первичной информации (PSR) и радар вторичной, обзорной информации (SSR). Система радара SSR содержит наземное устройство опроса и импульсные повторители SSR в движущихся объектах.
В последнее время была создана Американская система (Система глобального позиционирования) и соответствующая Российская система, называемая GLONASS, обе эти системы базируются на сигналах времени, посылаемых со спутников, имеющих известные элементы орбиты. Когда по крайней мере четыре таких спутника находятся выше горизонта, возможно получение локально однозначного положения с очень высокой точностью. Устройство для получения информации о таком положении хорошо известны и коммерчески доступны, что делает излишним приводить здесь их подробное описание, которое было бы больше, чем необходимо для описания настоящего изобретения.
Тот факт, что точное положение может быть получено с помощью оборудования, имеющего умеренную цену, привел к предложению его использования в навигации и для наблюдения за авиацией, перенаселенность которой самолетами стала печально известной в последние годы. Согласно заявке Великобритании GB-A-2 155 720, было предложено включить в ответ авиационного импульсного повторителя на запрос от станции управления не только его обычную информацию идентификации, но также и положение, определяемое станцией GPS движущегося объекта, несущего этот импульсный повторитель.
В патенте США N 4,835,537, включенном здесь в качестве ссылки, предлагается создать систему предотвращения столкновений, в которой самолеты, взлетно-посадочные полосы, фиксированные препятствия и наземные средства передвижения в аэропортах сигнализируют о своих положениях всем участкам движения. Тем самым сигнализация осуществляется в отдельном радиоканале для всех участников движения, с каждым участником движения, определяющим момент, когда этот канал не занят, и начинающим передавать свое сообщение по истечении произвольного времени ожидания. Эта передаваемая мощность удерживается на низком уровне, чтобы она не превышала радиуса уровня контролируемого воздушного пространства.
В настоящее время ответственность за контроль и мониторинг воздушного движения над землей разделяется между рядом Областных Центров Управления (АСС), и Центров Полетной Информации (FIC), каждый из которых ответственен за соответствующие регионы (Регионы Полетной Информации - FIR), в которых осуществляется мониторинг земли и управление воздушным движением, осуществляемым в определенных или во всех частях воздушного пространства, и/или обеспечивается определенное обслуживание самолета, который выполнил план полета. Каждый раз, когда самолет покидает один из этих регионов FIR, центр управления следующим регионам FIR извещается о принятой траектории полета, чтобы этот самолет мог быть обнаружен или идентифицирован. Перед вхождением в этот следующий регион FIR экипажу этого самолета отдается приказ об установлении радиоконтакта с центром управления региона FIR, в который этот самолет собирается войти.
Воздушное движение должно осуществляться по ограниченному ряду воздушных коридоров, часто называемых "авиалиниями" ("airways"), или заданным маршрутом. Эти авиалинии устанавливаются вдоль базирующихся на земле радионавигационных маяков или путем комбинации расположений таких радионавигационных маяков и "фиксированных точек", определяемых расстоянием и направлением к/от наземных маяков. Навигация самолета осуществляется с помощью приемников на борту, которые могут обнаруживать сигналы от наземных радионавигационных маяков, и имеют устройство отображения, которое указывает местоположение самолета относительно наземного маяка. Над поверхностью земли и в близких окрестностях от аэропорта центры управления также осуществляют мониторинг и контроль передвижений самолета с помощью радара. Минимальное боковое разделение между самолетами, летящими на одной высоте в этих контролируемых с помощью радара областях, может варьироваться обычно между 5-10 морскими милями. При окончательном приближении к аэропорту это минимальное радарное разделение между самолетами обычно составляет три морских мили. В областях, не имеющих радарного покрытия, это минимальное разделение для воздушного движения на той же высоте и дорожке обычно составляет десять минут, что в зависимости от скорости самолета составляет расстояние от 80 до 90 морских миль.
Воздушное движение над океанами осуществляется по заданным маршрутам. Учитывая тот факт, что невозможно определить положение самолета с помощью наземных радиомаяков или радара при работе над океаном, это разделение между самолетами должно быть существенно увеличено. Обычно минимальное боковое разделение между самолетами, летящими на одной высоте и на одной дорожке, в случае Севера Атлантики, составляет 60 морских миль.
В настоящее время число авиалиний и маршрутов ограничено, и самолет должен быть привязан к так называемым "слотам" ("интервалам"), которые распределены между авиационными компаниями или между индивидуальными самолетами, и очень часто заблаговременно. Задержись самолет по любым причинам на несколько минут на земле и пропусти свой "слот", это может вызвать дополнительные задержки на несколько часов, прежде чем этот самолет сможет получить новый свободный "слот".
Специальное управление полетом или устройства управления полетом установлены во многих областях мира. Необходимость в этих устройствах управления полетом и в процедурах распределения "слотов" вызывается недостатком вместимости в системах авиалиний на протяжении полетных маршрутов, и загруженностью аэропортов.
В аэропортах эта вместимость ограничивается рядом факторов. В основном, число взлетно-посадочных полос, рулежных дорожек и пропускных пунктов аэропортов, метеорологические условия, аппаратура навигации и приземления, процедуры управления воздушным движением и т.п., все это является важными элементами, которые по отдельности или все вместе влияют на эту вместимость. В ситуациях плохой видимости эти проблемы вместимости увеличиваются, главным образом благодаря неспособности современной технологии обеспечить управление воздушным движением с предоставлением возможности отображать и контролировать движения самолета и наземных транспортных средств. Времена занятости взлетно-посадочных полос также возрастают, когда самолет вынужден передвигаться на пониженных скоростях из-за трудности навигации на земле и плохой видимости. Это также снижает вместимость аэропорта.
Число инцидентов и несчастных случаев, вызванных потенциальными или реальными столкновениями самолетов с самолетами на земле и самолетов с наземными транспортными средствами за последние десятилетия возросло. Число таких серьезных инцидентов, произошедших в США, составляет величину порядка 5-7 на 100000 взлетов и посадок. Ряд фатальных инцидентов происходит уже на протяжении многих лет.
Система, которая обеспечила бы возможность управлению воздушным движением отображать и контролировать операции самолета на земле, также как и движения по земле наземных транспортных средств, в которой каждый член этой системы передавал бы информацию о своем положении и идентификации и представлял бы ее управлению воздушным движением для отображения ее, например, на дисплее, а также обеспечивал бы эту же информацию для пилотов, и которая могла бы использоваться для управления движением самолета, имела бы существенную важность с точки зрения повышения вместимости аэропортов и надежности.
Ожидается, что эти проблемы вместимости и надежности станут еще острее, так как, согласно прогнозам, воздушное движение будет продолжать увеличиваться с относительно высокой скорость. Удвоение существующего числа воздушных пассажиров (приблизительно 1,2 биллиона) и почти пропорциональный прирост числа операций самолетов, как ожидается, произойдет через ближайшие 10-12 лет.
Согласно заявлению представителя Немецкого Института аэрокосмических исследований, "если бы мы могли получить одно дополнительное приземление в час во Франкфурте, в течение года это составило бы 10 миллионов немецких марок на экономии в задержках". ("Нью сайентист" 16 ноября 1991 г., стр. 23).
Было создано несколько международных рабочих групп для рассмотрения существующей ситуации и для выработки рекомендаций о действиях, которые следует предпринять, чтобы повысить вместимость систем управления воздушным движением, а также надежность на земле. Несколько рабочих групп проводят свою работу под эгидой "Международной организации гражданской авиации" - ICAO. В нескольких странах, особенно в США, прикладываются существенные усилия для решения проблем безопасности, связанных с наземными операциями в аэропортах.
Таким образом, официально признается, что существует недостаток вместимости и что будет получена существенная экономия средств, если системы, которые могут обеспечить повышенную способность контроля и отображения воздушного движения, смогут повысить как безопасность, так и вместимость.
Главная цель изобретения - получить системы для контроля за совокупность подвижных объектов в том, что касается их мест расположений, с каждым членом совокупности, посылающим информацию о его положении в общий радиоканал, и которая допускает существование даже очень больших совокупностей объектов, предупреждая столкновения объектов и допуская центральное управление. Предполагаемыми совокупностями объектов могут быть самолеты, наземные транспортные средства и морские суда. Для того, чтобы такая система работала оптимально, необходимо исключать столкновения не только чисто физического характера, но также и столкновения коммуникационной природы, оба значения действительных столкновений предполагают, что более чем один участник передает одновременно так, что они мешают друг другу, и что невозможность передавать вызвана переполнением общего коммуникационного канала.
Специально частью этой цели изобретения для авиации является получение системы, которая могла бы быть использована самолетом где угодно, без исключения. Естественно, что риск столкновения будет больше там, где движение более плотное, но случайные скопления самолетов могут образоваться практически в любом месте земного шара.
Другой целью изобретения является создание лучшей возможности распределения самолетов для повышения вместимости воздушного пространства за счет исключения необходимости в структуре радиомаяков через распределенную локализацию, с каждым самолетом, имеющим свое собственное средство, позволяющее ему следовать по любому заданному коридору или маршруту, которое не должно быть материализовано с помощью общего наземного оборудования. В особенности там, где системы радиомаяков еще не были установлены, возможна большая экономия средств в этом отношении. Далее, когда могут быть определены маршруты, которые не зависят от систем радиомаяков, число маршрутов может быть повышено практически по желанию, и имеется возможность избежать существенного переполнения, по крайней мере, в окрестностях аэропортов. Узких мест при взлетах и посадках также можно избежать в значительной степени, если будут улучшены системы управления воздушным движением таким образом, чтобы боковые и/или вертикальные разделения между самолетами были уменьшены, а вместимость воздушного пространства повышена без возрастания риска столкновения.
При долговременных полетах над морем или в ненаселенных областях в настоящее время не существует систем, которые бы обеспечивали точное поверхностное управление авиацией, так как самолет не может быть обнаружен, например, радаром. Поэтому другая цель этого изобретения - обеспечить возможность для самолета, находящегося в таком положении, сообщать о своем положении центральной станции, предпочтительно с помощью спутниковой коммуникации, а частота этого сообщения затем может быть определена в самолете в зависимости от интенсивности локального воздушного движения, подлежащей определению системой.
Указанные и другие цели и преимущества достигаются в соответствии с изобретением с помощью системы индикации положения, включающей совокупность одновременно активных, движущихся станций, каждая из которых улавливает свое географическое положение, принимая сигналы от геометрических распределенных передатчиков, имеющих известные положения, и в которой каждая участвующая станция имеет передатчики для отправки в радиоканал, общий для этой системы, сигналов, индицирующих собственные идентичности и географические положения, и средство памяти для запоминания сигналов от других участвующих движущихся станций, и в которой в соответствии с этим изобретением каждая станция имеет средство обработки, такое как компьютер, содержащее ось вращения, которая прецизионно (точно) контролируется сигналами времени, принятыми от указанных, геометрически распределенных передатчиков, с указанной осью времени, определяющей блоки времени, стандартизованные вдобавок к этому, и перечисленные в заданном повторяющемся кадре, с указанным средством памяти, регистрирующим свободные блоки времени, в течение которых не было принято никаких передач, средство для выбора одного из указанных блоков времени для собственной повторяющейся передачи в нем информации идентичности и положения, с указанным передатчиком, работающим на частоте, имеющей дальность, существенно ограниченную линией зрения, и предпочтительно средство для выбора одного из указанных блоков времени для собственной повторяющейся передачи в нем информации идентичности и положения, с указанным передатчиком, работающим на частоте, имеющей дальность, существенно ограниченную линией зрения, и предпочтительно средство для произвольного переключения одного из используемых указанных блоков времени, и другой блок, зарегистрированный как свободный. В соответствии с предпочтительным примером осуществления каждая станция также определяет плотность воздушного движения в окружающей ее внешней среде и определяет в функции от нее, как много блоков времени должно использоваться в последующих кадрах.
Предпочтительно иметь в каждой станции монитор или что-то подобное, чтобы показывать местоположения других станций, наложенные, например, на карту. Другой предпочтительной особенностью является определение действительного риска столкновения из-за географического соседства, предупреждая об этом экипаж с помощью сигнала опасности. Поскольку имеется установленная сесть наземных центров управления (Областных центров управления - АСС, или центров полетной информации - FIC) для управления и мониторинга всех движений в воздухе, обо всех движениях в воздухе следует сообщать на землю с тем, чтобы в принципе только управление воздушным движением могло назначать изменение маршрута, включая изменение высоты, в ненаселенных регионах сигнализация к наземным центрам управления должна осуществляться с помощью спутниковых коммуникаций.
Конкретным качеством безопасности и избыточности является возможность использования передачи от других движущихся наземных объектов и/или станций в целях вторичной локализации. Если объект утрачивает средство спутниковой локализации, возможно, чтобы этот объект сохранил свою ось времени, работающей с помощью синхронизации от передач других движущихся объектов и/или наземных станций, а так как эти самолеты излучают сигналы положения в точном соответствии с хорошей синхронизацией службы единого времени ИТС, эти движущиеся объекты могут служить как вторичная система геометрических распределенных передатчиков, заменяющих спутники.
В соответствии с предпочтительным примером выполнения системы согласно изобретению предполагается, что наземная станция, например, в аэропорту, способна отдать приказ ближайшему самолету, чтобы он спонтанно остановил передачу и переключился на передачу в заказанном режиме, с блоками времени в максимальном кадре, определенными этой станцией. Наземная станция должна отдать этот приказ только один раз, что означает большую экономию времени занятости канала по сравнению с современным полигоном. По сравнению с используемым в настоящее время радарным обзором определенное преимущество здесь заключается в том, что самолет, подлетающий к аэропорту, не будет затенять каждого другого, даже если они движутся в одном направлении. Этот приказ от наземной станции может быть модифицирован на ведение более частых передач, когда самолет подлетает ближе к аэропорту, т.е. на посылку нескольких передач в течение каждого максимального кадра.
В соответствии с другим предпочтительным примером вторжения эта же система может быть использована для отслеживания наземного движения, например, в аэропорту. Каждое транспортное средство, допущенное на летное поле, должно тогда нести законченную систему, которая сигнализирует рассматриваемому наземному устройству управления, а также может быть принято другими транспортирующими средствами или самолетами. По крайней мере, эта наземная станция управления будет иметь дисплей с картой, на которой представлены движения всех транспортных средств и самолетов, такой же дисплей по желанию может быть установлен и на этих транспортных средствах. Эта же карта может быть показана на аналогично оборудованных самолетах. Ввиду того факта, что в больших аэропортах могут иметься сотни движущихся транспортных средств и самолетов, эта система внесла бы значительный вклад в улучшение надежности.
При работе в системе GPS эти локальные оси времени могут быть выполнены исключительно точными, так как каждый из спутников излучает сигналы в системе единого времени ИТС. Чтобы рассчитывать положение в пространстве, должно приниматься не менее четырех передач от супников, так как неизвестны три пространственных координаты и время. Поскольку скорость света известна, соответствующие расстояния до этих спутников и истинное время ИТС определяется из этих сигналов времени. (Если известна высота, теоретически необходимо только три спутника). Затем можно посчитать, что необходимая точность по времени ИТС должна составлять приблизительно 100 НС. Очевидные военные соображения дают величину дрожания времени произвольного характера, которая прибавляется к сигналам времени спутника (названную избирательной пригодностью - S/A), делая необходимым для очень точного определения положения иметь доступ к наземной станции (называемой Опорной станцией), находящейся в пределах покрытия, для компенсации этого дрожания времени. Однако этой точности времени вполне достаточно для целей этого изобретения, так как каждая станция имеет доступ к оси времени, имеющей такую же точность.
Вместо использования такой высоко прецизионной нормали времени возможно также построить систему, в которой одна из движущихся станций была бы разработана как мастер времени, выдающей серии (lots). Учитывая хороший стандарт времени, доступный от спутников GPS, предпочтительно использовать это время. Однако если приемник спутника GPS на одной станции откажет, таймеры других движущихся станций могут быть использованы как резервное средство. Если откажут сами спутники, можно прибегнуть к сигналам, посылаемым в этот канал передачи существующими фиксированными станциями в аэропортах, и эти движущиеся станции будут способны передавать их положения известным способам, предоставляя систему позиционирования, которая является подчиненной, но все-таки используемой в случае аварийной ситуации. Поэтому в соответствии с изобретением каждая движущаяся станция использует для передачи блоки времени, определенные общей осью времени. Каждая станция пытается выбрать блоки времени, которые не заняты другой станцией. Одновременно каждая станция прослушивает заданную радиочастоту и определяет относительные положения, по крайней мере, ближайших соседей относительно своего собственного положения. Эта собственная станция определяет, исходя из этих данных, насколько часто она должна передавать. Самолет над пустынным морем, возможно, посылает информацию о своем положении один раз в минуту, тогда как другой самолет при очень напряженном движении должен будет передавать сигналы своего положения через очень короткие интервалы времени.
В соответствии с предпочтительным примером волнения риск столкновения передач может быть очень сильно понижен тем, что автономно передающая станция может инициировать в регулярной передаче, что она собирается переключить блок времени и к какому из свободных блоков времени это переключение должно быть сделано. Эта информация посылается в последнем сообщении старого блока и, возможно, в одном или более из предшествующих отправлений в этом блоке. Другие участники будут знать это и не станут присваивать этот блок времени. Вновь вступающие станции будут прослушивать один или более максимальных кадров перед началом передачи и не станут пытаться передавать в течение блока времени, который уж был присвоен до этого. Таким образом, этот тип столкновения едва ли возможен, за исключением случая, когда две вновь вступающие станции обе пытаются занять свободный блок времени. Вероятность такого события еще больше уменьшается тем фактом, что вступление системы обычно происходит в аэропорту и передача начинается по приказу от центрального управления.
Это изобретение не ограничивается использованием движения в воздухе или на море и может также использоваться на земле для слежения за поездами, грузовиками, такси и даже за животными, обеспеченными необходимым оборудованием. В определенных случаях и в соответствии с конкретным воплощением центральная станция может отдать участнику приказ на отправку большего количества информации, чем информация о его собственном положении. Каждая станция хранит в своей памяти положения других движущихся станций, сигналы от которых она приняла. Возможно, что центральная станция затем потребует передать ей содержимое этой памяти, обеспечивая этим возможность локализовать станции, передачи от которых не смогли быть приняты этой центральной станцией.
Исходя из этой фундаментальной идеи, что все движущиеся станции в системе имеют точную ось времени, назначение блоков времени может быть выполнено многими способами, их длина может выбираться многими способами, так же, как скорость сигнализации и используемая ширина полосы.
В представленном случае и исходя из обстоятельств, эта обмениваемая информация в каждой передаче может состоять из 150-200 бит. При скорости передачи 9600 бод (baud) такое сообщение занимает максимум 20 мс. Время переключения с приема на передачу составляет 1-3 мс, а так как станция должна прослушивать все блоки времени, когда она сама не ведет передачу, необходимо сначала организовать такое "мертвое" время и создающее возможность для передающей станции прослушать окончательное сообщение в следующем блоке времени. Подходящая длительность для такого блока времени могла бы быть равной 26,66 мс, с тем чтобы каждая минута содержала 2250 блоков времени. По практическим причинам удобно будет принять определенный период, например, одну минуту, в качестве максимального кадра.
Каждая станция прослушивает трафик на назначенной частоте и регистрирует в своей памяти, какие блоки времени свободны, а также положение и т.п. для таких станций, сигналы которых она принимает. Эта информация автоматически обрабатывается с целью определить, как близко эти соседи находятся и как должна выполняться собственная передача. Те станции, которые не имеют близких соседей, не должны передавать часто, т. е. они должны передавать только дважды или несколько раз в минуту.
Эта информация также может обрабатываться для представления на мониторе, в подходящем масштабе, затем могут быть показаны окружающие станции с вектором, длина которого указывает скорость, и с цифрами, обозначающими высоту. В отличие от обыкновенного радара это изображение или карта соотносится с фиксированной системой координат (вычерченной). Это значительно упрощает визуальный анализ риска столкновения. В некоторых случаях, когда этот объект должен выполнять приказ по обслуживанию транспортных средств в аэропорту для предотвращения столкновений, возможно оставлять монитор на каждом транспортном средстве, так как будет достаточно, если центральное управление сможет наблюдать систему на мониторе.
Как указывалось, предусматривается, чтобы станция могла быть активной в автономном режиме или в приказном режиме наземной станции. В автономном режиме передачи эта индивидуальная станция выбирает блок времени, который оказался незанятым при предыдущем прослушивании. С целью предотвращения ситуации, когда более чем одна станция присваивает один и тот же блок и блокирует его, что ни одна из станций не в состоянии осознать, не обладая способностью одновременной передачи и приема, они систематически изменяют выбранный блок времени, с частыми интервалами, используя генератор случайных чисел (псевдо-случайный алгоритм). Например, эта станция может совершать переход через произвольно определяемое число занятых блоков времени к свободному блоку времени. Если, как объяснялось ранее, об этом переходе было предварительно заявлено и новый блок времени тем самым предварительно очищен, взаимные помехи практически могут быть исключены.
Этот приказной режим обычно устанавливается по приказу от фиксированной станции, например, от воздушного управления аэродромом (приказной режим наземной станции). Эта фиксированная станция имеет ту же ось времени и может вызывать движущиеся станции в свободном блоке времени, назначая им серии индивидуального блока времени и заставляя их останавливать автономную передачу, и затем передавать только в указанных сериях блоки времени. Эта станция управляемая воздушным движением затем может получать информацию положения в произвольные интервалы времени. Удобно ограничивать эти доступные блоки времени для приказного режима, скажем до 75% времени полного максимального кадра, но даже при таком ограничении и вышеуказанном примере будет доступно 1685 блоков времени в минуту. Даже если будет необходимо отслеживать до 50 самолетов, они смогут передавать с интервалами около двух секунд. Это следует сравнивать со стандартной системой вращающегося радара, антенны которого вращаются со скоростью, меньшей чем 6-8 с за оборот. Этот пример очень схематичен, так как самолет обычно передает на разных скоростях м наибольшая скорость необходима только, когда самолет находится очень близко к аэродрому.
Управление воздушным движением может также отображать это движение на дисплее в соответствующем масштабе и обеспечивать обзор гораздо более высокого качества, чем то, что было возможно до сих пор, особенно в тех областях, в которых радарные системы не могут быть или не были организованы. Для стран, которые еще не приобщились к важной наземной инфраструктуре управления воздушным движением для управления самолетами, настоящее изобретение может обеспечить высококачественную, экономически эффективную альтернативу инфраструктуре вложений, которая в настоящее время может выходить за пределы их возможностей. В регионах, которые в настоящее время не охвачены радиолокационным покрытием, движущиеся станции могут сообщать через спутниковые коммуникации информацию идентичности, положения, высоты и т.п., информируя ответственные наземные центры управления обо всех положения, а наземная станция затем может отдать приказ самолету об изменении его направления или высоты для избежания столкновений. Для обеспечения прибытия самолета в точно заданное время, не допуская при этом очередей, переполнения или описывания окружностей перед посадкой в аэропорту, управление воздушным движением может предложить самолету совершать крейсерское движение с заданной скоростью.
Изобретение создает возможность для получения нескольких преимуществ для воздушного движения. Первое преимущество заключается в том, что возможно распределять авиационные коридоры-авиалинии, определенные по радиомаякам, которые ранее проводили к скоплениям, а иногда - к удлинению полетного пути между аэропортами. Второе преимущество - это улучшенная возможность отслеживать движения самолетов и наземных транспортных средств. Во многих случаях вместимость взлетно-посадочной полосы может быть повышена. В мертвый штиль воздушные возмущения, создаваемые самолетом на взлетно-посадочной полосе, могут сохраняться в течение нескольких минут, но обычно очень быстро уносятся ветром, так что при слабом боковом ветре эта вместимость может быть повышена, если разделение между последовательно садящимся и взлетающим самолетом может быть уменьшено без увеличения риска столкновения. При плохой видимости самолет может двигаться по земле с большей скоростью, минимизируя этим время занятости взлетно-посадочной полосы и улучшая вместимость.
При движении на море проблема состоит в том, что многие морские пути и гавани сильно перегружены, представляя опасность, особенно при плохой погоде, и столкновения могут приводить к серьезным последствиям не только для самих судов. Даже здесь изобретение может оказаться очень ценным. Если участники морского и воздушного движения будут оборудованы устройствами в соответствии с изобретением, каждый со своей собственной, отведенной ему частотой, возможно дополнительное преимущество. При возникновении бедствия на море бедствующему судну может быть разрешено вклиниться в частоту воздушного движения, чтобы послать сообщение MAYDAY, которое, вероятно, будет принято станцией на самолете благодаря его большой высоте. Эта авиационная станция сможет затем вклиниться в морскую частоту и связаться с другими судами, которые недостижимы для сигналов положения от бедствующего судна.
На фиг. 1 дана блок-схема станции в соответствии с изобретением; на фиг. 2 - коммуникационный процессор для станции; на фиг. 3 - 7 - соответственно блок-схема примерной компьютерной программы.
Пример. Движущаяся станция, показанная на фиг. 1, содержит устройство 1, которое отслеживает воздушное движение, компьютер 2 представления данных, и монитор 3, на котором пилот может визуально наблюдать за воздушным движением. Устройство 1 содержит приемник 4 информации от спутника для системы GPS, который принимает сигналы от множества спутников, содержащие сигналы времени и орбитальные элементы. В принципе это изобретение не ограничено использованием спутников системы GPS. Также Российская система GLONASS или комбинация систем GPS или GLONASS может быть использована для определения положения движущегося объекта. Такое устройство GPS коммерчески доступны, например Magnavox MX 4200 от "Магновокс корп." США. Кроме этого, следует сказать, что такое устройство может доставлять географическое положение по широте и долготе с высокой точностью, по высоте с несколько меньшей точностью и время ИТС с очень высокой точностью. Далее, доступна информация по скорости и курсу. Эта информация доступна для процесса коммуникаций 5, который в свою очередь соединен с передатчиком-приемником 6. Этот приемник 4 информации от спутника работает на частоте 1,4 ГГц, тогда как передатчик-приемник работает на частоте 141 МГц. Этот примерный процессор коммуникаций более подробно показан на фиг. 2. Следующая информация посылается при каждом событии передачи:
1. Флаг начала и код, индицирующий спонтанный режим передачи или приказной режим передачи (8 бит).
2. Код идентификации станции (18 бит, 8 знаков, каждый по 6 бит).
3. Положение по широте и долготе (24 бита широта за 1/1000 мин; 25 битов долгота за 1/1000 мин).
4. Скорость, 11 бит, Kt шага.
5. Направление полета, 12 бит, десятые доли градуса.
6. Высота, 12 бит, шаги по 16 футов.
7. Время, 6 бит, когда эти передаваемые значения активны (0-6- с).
8. Биты состояния, объявляющие начало сообщения об изменении блоков, и т.п.
9. Контрольная сумма.
10. Флаг конца.
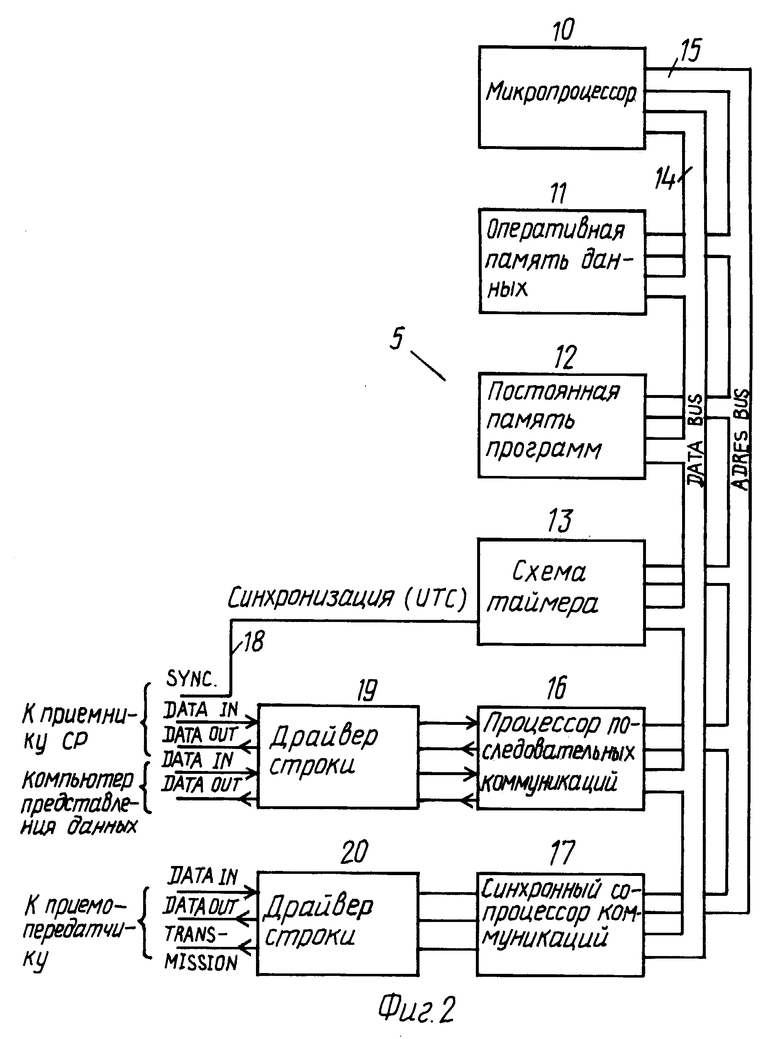
Как видно из фиг. 2, процессор 5 коммуникаций содержит микропроцессор 10, оперативную память RAM 11, постоянную память программ PROM 12 и схему таймера 13, которые все взаимодействуют через ширину адреса 15 и шину данных 14. Для связи с другими устройствами имеется схема последовательной связи 16, а для передачи и приема синхронных коммуникаций - сопроцессор 17. В качестве микропроцессора можно использовать кристалл HD64180 ("Хитачи"), а в качестве сопроцессора - siemens S АБ 82525 (версия VA3). Схема таймера 13, которая отслеживает мультиплексирование времени, запитывается от устройства GPS 4 (фиг. 1) сигналами, синхронизированными временем ИТС через проводник 18 (фиг. 2), принимая один сигнал времени в секунду и последующую информацию времени от системы GPS. Драйверы 19 и 20 добавлены для обеспечения соответствующей синхронизации сигналов. Оперативная память RAM 11 запоминает каталог всех принятых сигналов от других станций, так что идентичности и положения запоминаются и обновляются. В течение времени максимального кадра все принимаемые участники будут прослушиваться, и чтобы не засорять память информацией от неактивных участников, информация неактивных участников будет удаляться из памяти, если эти участники не прослушиваются в течение заданного времени. Далее запоминается информация о том, какие блоки времени свободны. Процессор коммуникаций также определяет повторяющуюся скорость излучения в зависимости от плотности воздушного движения или по приказу от центральной наземной станции. Микропроцессор 10 работает с программным обеспечением, содержащим систему, работающую в режиме реального времени, возбуждающую ряд различных программ с разными приоритетами:
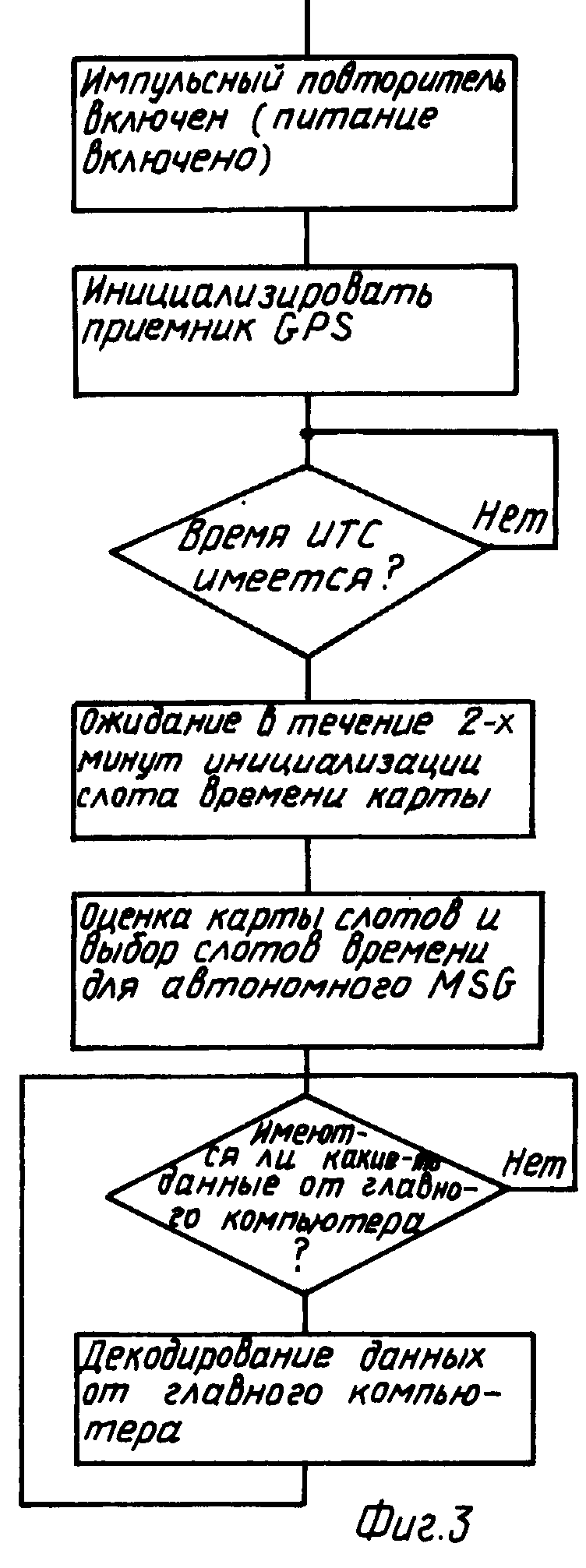
Программа 1 считывает и декодирует данные от главного компьютера, которым может быть компьютер 1 на фиг. 1 или в случае фиксированной станции управления - ее собственный главный компьютер. Блок-схема такой программы представлена на фиг. 3.
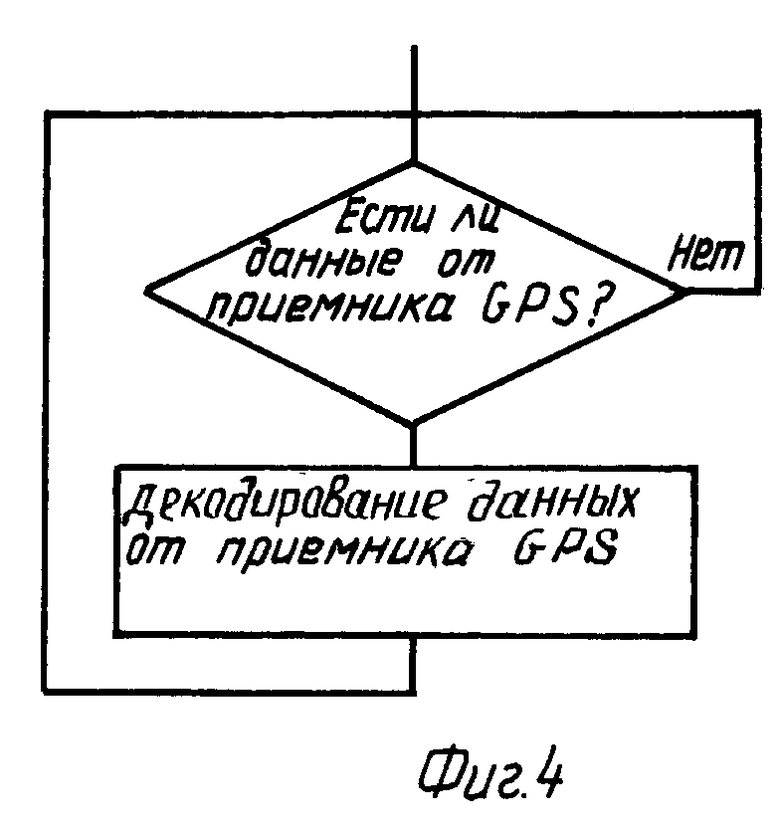
Программа 2 считывает и декодирует данные, приходящие от приемника 4 GPS в соответствии с блок-схемой на фиг. 4.
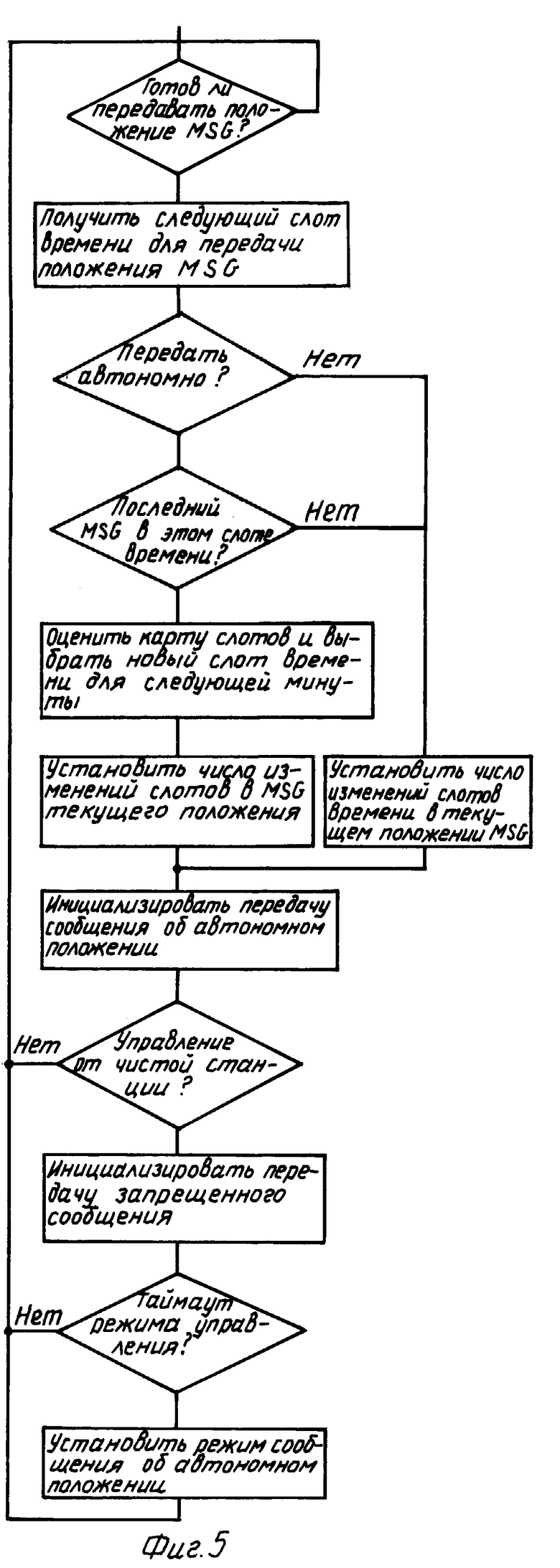
Программа 3 генерирует сообщения и управляет передачей и другими функциями контроля для приемопередатчика 6 (фиг. 1) в соответствии с блок-схемой, показанной на фиг. 5.
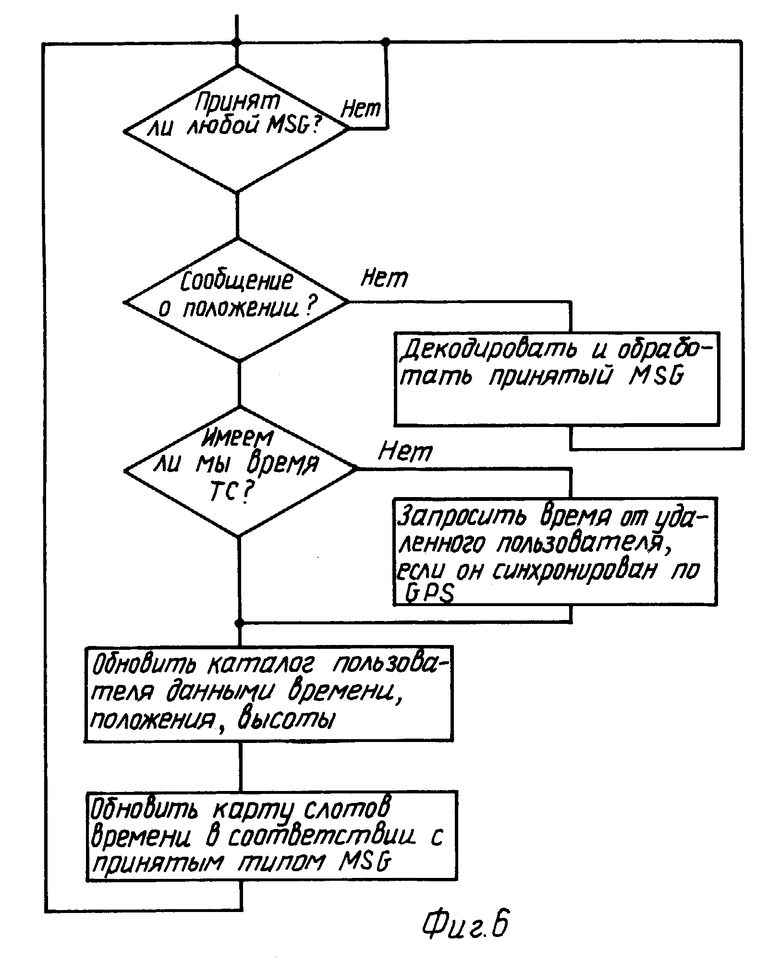
Программа 4 обеспечивает прием и декодирование принятых сообщений от приемопередатчика и обновляет каталог других пользователей, включая сюда картографирование блоков времени или других слотов времени в качестве занятых в соответствии с блок-схемой на фиг. 6.
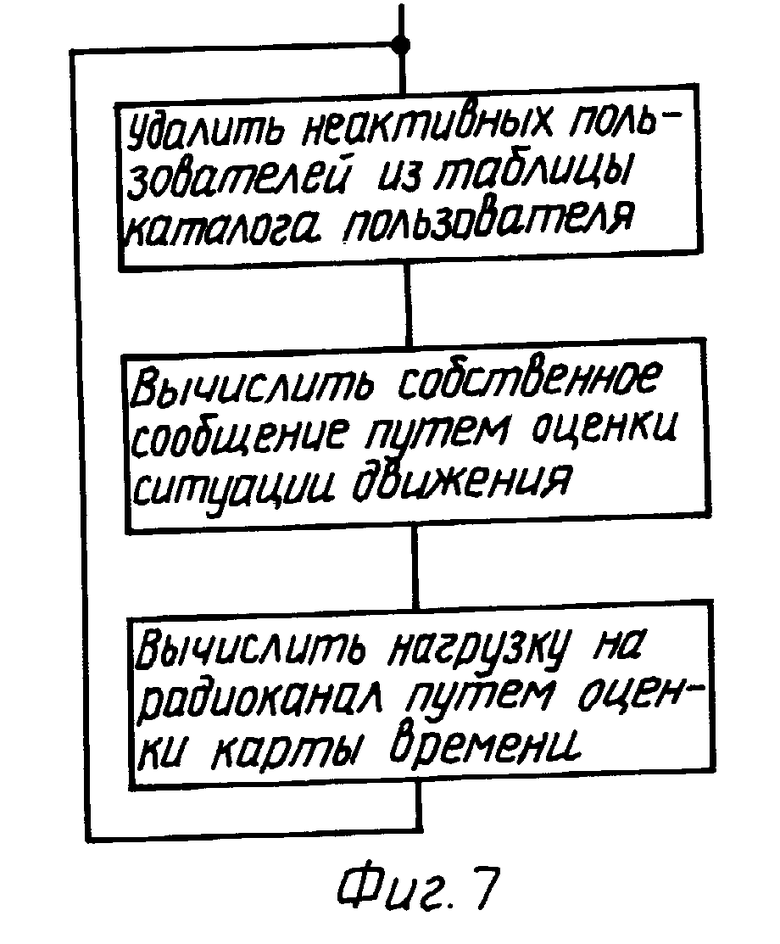
Программа 5 обновляет каталог пользователей, удаляя из него участников, которые либо перестали прослушиваться, либо потому, что они уже приземлились и отключились, либо находятся вне пределов досягаемости. Затем рассчитывается скорость собственных сообщений, например, вычислением того, как много соседей находятся в пределах заданного расстояния. Определяется наименьшая скорость передачи, ниже которой скорость не должна падать. Затем определяется нагрузка на ридиоканал. Блок-схема программы 5 показана на фиг. 7.
Компьютер 2 представления данных извлекает свои данные из каталога в памяти процессора коммуникаций и манипулирует этой информацией, частично для удовлетворения потребностей монитора, и частично для сигнализации пилоту о действиях, которые могут быть необходимы. Так как во время длинных маршрутов уровень и частота стимулов низкие и поэтому трудно полностью сосредоточить внимание, было бы очень ценно иметь возможность создавать точные сигналы для привлечения внимания в соответствии с определенными критериями (рядом находится другая станция на пути к своей собственной станции и т.п.). Для правильного функционирования особенно важно, чтобы все станции располагали осью времени, имеющей хорошую надежность. В приведенном примере это осуществляется схемой таймера 13, которая, принимая раз в секунду импульс времени от устройства GPS, может привязывать частоту синхронизации процессора с очень высокой точностью, то есть так, чтобы можно было поддерживать назначенные или присвоенные блоки времени.
Возможно также, если по некоторой причине приемник GPS отказал, получать помощь от сигналов времени, принятых соседними станциями, включая наземные станции. Эти сигналы, принятые по радио, могут быть использованы в качестве другого множества геометрически распределенных передатчиков, имеющих известные положения. Точность этого положения, конечно, будет пониженной. Поэтому предпочтительно включать в это сообщение информацию о том, что информация положения менее точная. В случае отказа спутников GPS по некоторой причине (маловероятное событие) система может все-таки сохранять ограниченную работоспособность в течение времени, пока множество наземных станций будет обеспечивать общее время, например, с точными сигналами синхронизации, которые могут калиброваться от выбранного спутника из существующих спутников с геостационарной орбитой. Чтобы эта система была работоспособной как всемирная система, необходимо, чтобы существовал общий протокол для частот, которые должны использоваться, а также расстановка всех блоков времени и кадров. Поэтому настоящий пример следует рассматриваться как неограничивающий пример приложения этого изобретения, как это будет без труда понятно специалистам и в этой отрасли техники.
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА КОНТРОЛЯ ВОЗДУШНОГО ДВИЖЕНИЯ | 2015 |
|
RU2592058C1 |
| СПОСОБ ОБЕСПЕЧЕНИЯ БЕЗОПАСНОСТИ ДОРОЖНОГО ДВИЖЕНИЯ | 2010 |
|
RU2469890C2 |
| СИСТЕМА И СПОСОБ ОБЕСПЕЧЕНИЯ БЕЗОПАСНОСТИ ПОЛЕТОВ И/ИЛИ УПРАВЛЕНИЯ ПОЛЕТАМИ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 2009 |
|
RU2471245C2 |
| СИСТЕМА ПРЕДУПРЕЖДЕНИЯ СТОЛКНОВЕНИЯ ЛЕТАТЕЛЬНЫХ АППАРАТОВ ПРИ ЛЕТНЫХ ИСПЫТАНИЯХ | 1996 |
|
RU2134911C1 |
| СИСТЕМА С УСТРОЙСТВОМ АВИАЦИОННОЙ ЭЛЕКТРОНИКИ И НАЗЕМНОЙ СТАНЦИЕЙ ДЛЯ УПРАВЛЕНИЯ ЛЕТАТЕЛЬНЫМ АППАРАТОМ, ОТКЛОНИВШИМСЯ ОТ МАРШРУТА, И ДЛЯ АВАРИЙНОЙ СВЯЗИ | 2003 |
|
RU2318243C2 |
| МАЛОГАБАРИТНАЯ НАВИГАЦИОННАЯ СИСТЕМА РАДИОЗОНДИРОВАНИЯ АТМОСФЕРЫ | 2016 |
|
RU2613342C1 |
| КОМПЛЕКСИРОВАННЫЙ УНИВЕРСАЛЬНЫЙ ВСЕПОГОДНЫЙ СПОСОБ ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ И ПОСАДКИ ВОЗДУШНОГО СУДНА И УСТРОЙСТВО ЕГО ОСУЩЕСТВЛЕНИЯ | 2010 |
|
RU2441203C1 |
| СИСТЕМА РАДИОСВЯЗИ С ПОДВИЖНЫМИ ОБЪЕКТАМИ | 2013 |
|
RU2544007C2 |
| Система мониторинга координат спускаемых космических объектов или их аппаратов в атмосфере Земли и их диспетчерского контроля | 2017 |
|
RU2659376C1 |
| СПОСОБ ИНДИКАЦИИ ПОЛОЖЕНИЯ ОБЪЕКТОВ НАБЛЮДЕНИЯ | 2006 |
|
RU2333538C2 |
Множество движущихся объектов, таких как самолеты, обеспечено приемниками GPS, позволяющими индивидуально определить широту и долготу. Далее этот приемник также будет выдавать сигналы очень точного времени. В соответствии с изобретением это очень точное время используется для обеспечения возможности всем объектам, составляющим это множество, передавать на заданной частоте их идентичности и положения в прецезионно определенных блоках времени. Путем назначения этих частот в диапазоне весьма высоких частот (UHF) или ультравысоких частот (VHF) диапазон их приема ограничивается так, чтобы эта система могла стать всемирной. Передачи могут приниматься всеми участниками, также как и центрами управления воздушным движением на земле. 2 с. и 11 з.п. ф-лы, 7 ил.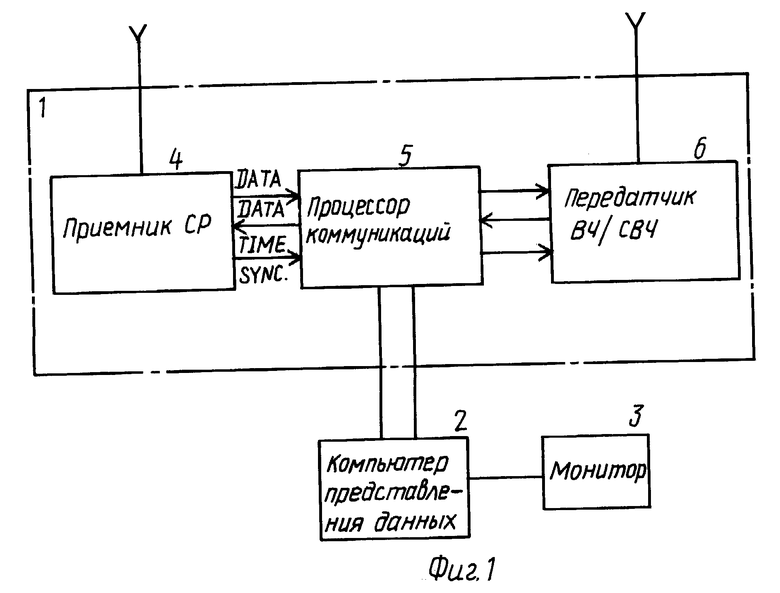
| Шебшаевич В.С | |||
| и др | |||
| Дифференциальный режим сетевой спутниковой радионавигационной системы | |||
| Зарубежная радиоэлектроника, N 1, 1989 - М., Радио и связь, с.5 - 32 | |||
| Мищенко И.Н., Раманов Л.М | |||
| Новые разработки спутниковых радионавигационных систем | |||
| Зарубежная радиоэлектроника, N 1, 1989, - М.: Родио и связь, с.68 - 81. |
