Изобретение относится к дорожно-строительной технике, в частности к автогрейдерам.
Известен автогрейдер ДЗ-180, на котором используется система автоматического управления типа "Профиль"-30(серийно выпускаемый на Брянском заводе дорожных машин). При использовании указанной системы отвал автоматически удерживается на нужной высоте от базовой поверхности (например, туго натянутый шнур). При работе в таком режиме производительность автогрейдера возрастает за счет уменьшения числа проходов, но появляется дополнительная затрата времени на установку и нивелировку копирного шнура.
Целью изобретения является повышение производительности труда и улучшение условий работы оператора.
Поставленная цель достигается тем, что в автогрейдере, содержащем основную раму, рабочий орган, балансиры и систему автоматического управления положением отвала, пропорциональные датчики автоматической системы управления размещены между балансиром и основной рамой, рабочим органом и основной рамой, причем расположение датчиков соответствует условию
где
a - база машины;
b - расстояние от оси переднего моста до отвала;
c - расстояние от оси балансира до датчика;
d - расстояние от оси переднего моста до датчика,
причем с целью повышения точности профилирования на второй балансир может устанавливаться дополнительный датчик, при этом выдерживается соотношение
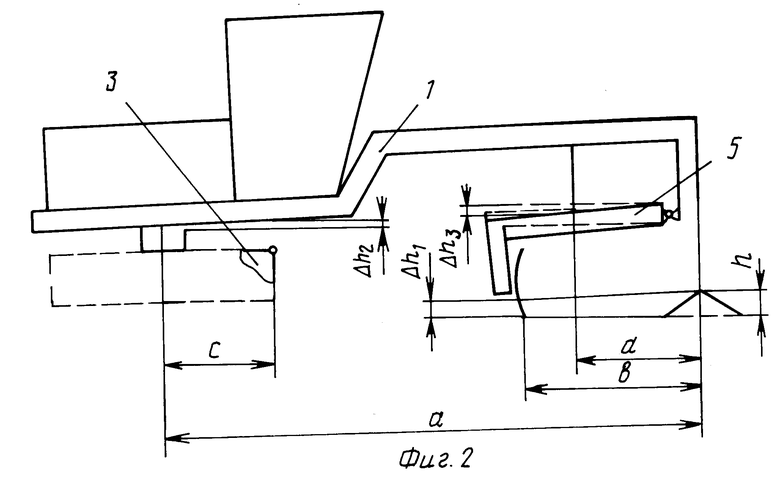
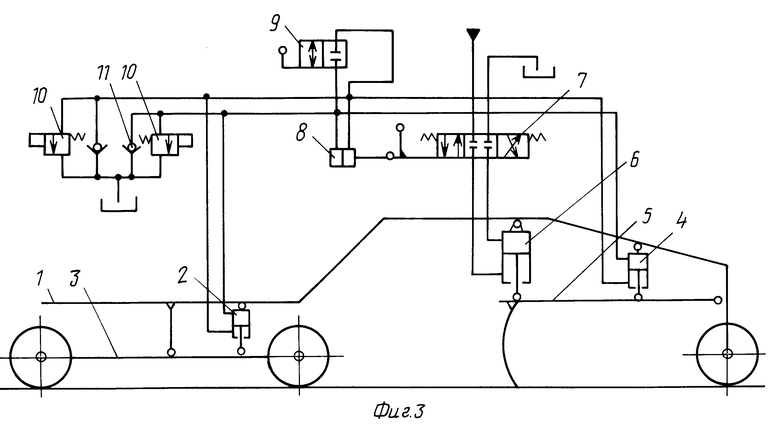
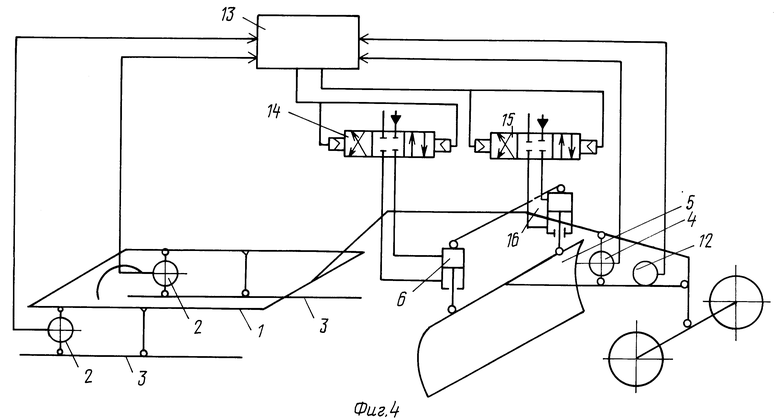
На фиг. 1 показано расположение пропорциональных датчиков на автогрейдере; на фиг. 2 - то же, при прохождении автогрейдером неровностей земляного полотна высотой; на фиг. 3 - возможная принципиальная гидравлическая схема системы автоматического управления отвалом; на фиг. 4 - возможная электрогидравлическая блок-схема системы автоматического управления отвалом.
На основной раме автогрейдера 1 установлен датчик 2, который контролирует расстояние между балансиром 3 и основной рамой 1. Датчик 4, установленный на раме 1, контролирует расстояние между рабочим органом 5 и основной рамой 1 (точки 3 и 4).
При этом датчики расположены таким образом, что при продольном наклоне основной рамы 1 датчики имеют одинаковый сигнал, если нижняя кромка ствола рабочего органа 5 удерживается гидроцилиндрами 6 на средней линии профиля. Гидроцилиндр 6 управляется с помощью гидрораспределителя 7. Небольшой гидроцилиндр 8 служит для управления гидрораспределителем 7 при работе системы в автоматическом режиме. Клапан (вентиль) 9 служит для переключения систем с автоматического управления на ручное. Два напорных золотника 10 защищают систему от перегрузок и позволяют оператору делать вручную корректировку положения отвала при работе в автоматическом режиме. Обратные клапаны 11 служат для соединения всасывающей магистрали с баком, поддерживают систему постоянно заполненной независимо от положения балансира и рабочего органа. Датчики 2 и 4 расположены таким образом, что их сигналы уравновешивают друг друга, если нижняя кромка отвала находится на средней линии продольного профиля дороги независимо от положения основной рамы. Это условие выполнится при соотношении размеров
где
a - база машины;
b - расстояние от переднего моста до отвала;
d - расстояние от оси балансира до точки установки датчика;
c - расстояние от оси переднего моста до точки установки датчика на рабочем органе,
при использовании электрогидравлической системы управления типа "Размер МР" электрические датчики высотного положения 4 и датчик поперечной стабилизации 12.
Датчики свои сигналы передают на пульт управления 13. Пульт оснащен микропроцессором, который суммирует показания датчиков 2 и сравнивает с показаниями датчика 4 и выдает сигнал на управление гидрораспределителем 14. По показателям датчика 12 микропроцессор вырабатывает сигнал на гидрораспределитель 15, который управляет положением отвала гидроцилиндра 16. Наиболее точного регулирования положением отвала можно достичь при установке датчиков 2 на каждом балансире 3 и установке на рабочем органе двух датчиков: высоты 4 и поперечного уклона 12. При использовании микропроцессора 13 машина может работать в различных режимах. Например, работая на обочине, один балансир идет по покрытию дороги и оператор включает управление отвалом от левого балансира. При работе на земляном полотне высотное положение отвала лучше выдерживать по сумме показаний (среднее значение) двух датчиков 2. Так как в этом случае меньше сказываются случайные неровности полотна, попадающие под одно колесо.
Описанная система автоматического управления работает следующим образом. При профилировании земляного полотна передние колеса автогрейдера едут по неровностям полотна, а задние - по уже профилированному полотну. При наезде переднего колеса на неровность дороги высотой h передняя часть основной рамы 1 поднимается. При этом рабочий орган 5 поднимается на высоту Δh1
где
a - база машины;
b - расстояние от переднего моста до отвала рабочего органа.

Основная рама 1 поднимается также над краем балансира 3 на высоту Δh2, где c - расстояние от оси балансира до места установки датчика. Датчик 2 вырабатывает сигнал, пропорциональный смещению Δh2, сигнал поступает к исполнительному механизму 8, который перемещает гидрораспределитель 7 и гидроцилиндр 6 начинает возвращать рабочий орган 5 на среднюю линию профиля. При этом между рамой 1 и рабочим органом 5 изменяется расстояние Δh3. Датчик 4 вырабатывает сигнал, пропорциональный Δh3. Сигнал датчика 4 вычитается из сигнала датчика 2 и исполнительный механизм 8 остановит гидроцилиндр 6, когда сигналы сравниваются Δh2= Δh3.
Перемещение Δh1 связано с перемещением Δh3 соотношением
где
d - расстояние от оси передних колес до датчика 4.
Преобразуя формулу, получим Δh2= Δh3,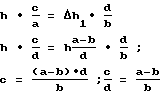 ;
;
эта формула показывает соотношение расположения датчиков в зависимости от базы машины и места расположения отвала в базе машины. Для более точного регулирования положения отвала датчики могут быть установлены на обоих балансирах и система будет работать от суммы сигналов датчиков, установленных на балансирах, снижая вероятность случайных ошибок.
В таком случае соотношение расположения датчиков должна удовлетворять условию
Гидроклапан (вентиль) 9 служит для переключения с автоматического режима работы на ручной. Когда он находится в положении "открыто", усилия на исполнительном органе 8 не возникает и гидрораспределитель 7 управляется вручную.
Напорные золотники 10 служат для регулировки усилия, развиваемого исполнительным органом 8. Усилие регулируется таким образом, чтобы его было достаточно для перемещения гидрораспределителя 7, но оно могло бы быть преодолено усилием руки оператора на рукоятку гидрораспределителя 7, для оперативного вмешательства в работу системы. Обратные клапаны 11 служат для заполнения системы жидкостью тем более, что при рассогласовании положения датчиков (режим ручного управления) объем системы меняется.
При использовании электрических датчиков (фиг. 4) система обладает наибольшей гибкостью и наибольшими возможностями. Кроме датчиков 2 и 4, на рабочий орган устанавливается датчик 12, который контролирует поперечный уклон отвала. Использование в схеме пульта управления с микропроцессором 13 позволяет управлять рабочим органом по специальной схеме. Микропроцессор не только суммирует показания датчиков, но может пропорционально изменить величину сигнала или сместить нулевую точку датчика, что позволяет оператору оперативно изменить положение отвала и держать отвал чуть ниже или чуть выше средней линии профиля в зависимости от необходимости. При этом микропроцессор управляет гидроцилиндрами 6 и 16 через гидрораспределители с электроуправлением 14 и 15.
Данное изобретение позволяет использовать автоматическую систему управления положением отвала, которая удерживает отвал на средней линии профиля земляного полотна без использования специальной базовой поверхности. Базовой поверхностью будет являться само земляное полотно. Применение такой системы значительно повысить производительность автогрейдера (за счет снижения количества проходов), а также облегчит оператору управления автогрейдером.
| название | год | авторы | номер документа |
|---|---|---|---|
| ФРЕЗА ДОРОЖНАЯ НА БАЗЕ АВТОГРЕЙДЕРНОГО ШАССИ | 1997 |
|
RU2128268C1 |
| СНЕГОУБОРОЧНАЯ МАШИНА | 1996 |
|
RU2143027C1 |
| БОКОВОЕ РАБОЧЕЕ ОБОРУДОВАНИЕ АВТОГРЕЙДЕРА | 2010 |
|
RU2435908C2 |
| ДОРОЖНЫЙ СТАБИЛИЗАТОР НА БАЗЕ АВТОГРЕЙДЕРНОГО ШАССИ | 1997 |
|
RU2167973C2 |
| ОГРАНИЧИТЕЛЬ ПОТОКА ДЛЯ ГИДРООБЪЕМНОЙ ТРАНСМИССИИ | 1995 |
|
RU2108243C1 |
| РАБОЧЕЕ ОБОРУДОВАНИЕ АВТОГРЕЙДЕРА | 1997 |
|
RU2155254C2 |
| ЗЕМЛЕРОЙНАЯ МАШИНА | 1989 |
|
RU2068060C1 |
| МАШИНА ДЛЯ ОБРАБОТКИ ПОВЕРХНОСТИ ПОЛОТНА ДОРОГИ | 1998 |
|
RU2149237C1 |
| СИСТЕМА УПРАВЛЕНИЯ ГУСЕНИЧНЫМ ТРАНСПОРТНЫМ СРЕДСТВОМ | 1992 |
|
RU2026226C1 |
| РАБОЧЕЕ ОБОРУДОВАНИЕ АВТОГРЕЙДЕРА | 2020 |
|
RU2760663C1 |
Использование: дорожно-строительная техника, в частности автогрейдеры. Сущность изобретения: автогрейдер содержит основную раму, рабочий орган, балансиры и систему автоматического управления положением отвала. Пропорциональные датчики автоматической системы управления размещены между балансиром и основной рамой, рабочим органом и основной рамой. На втором балансире может устанавливаться дополнительный датчик. Датчики установлены в определенном положении относительно базы машины, переднего моста, отвала и балансира. 2 з.п.ф-лы, 4 ил.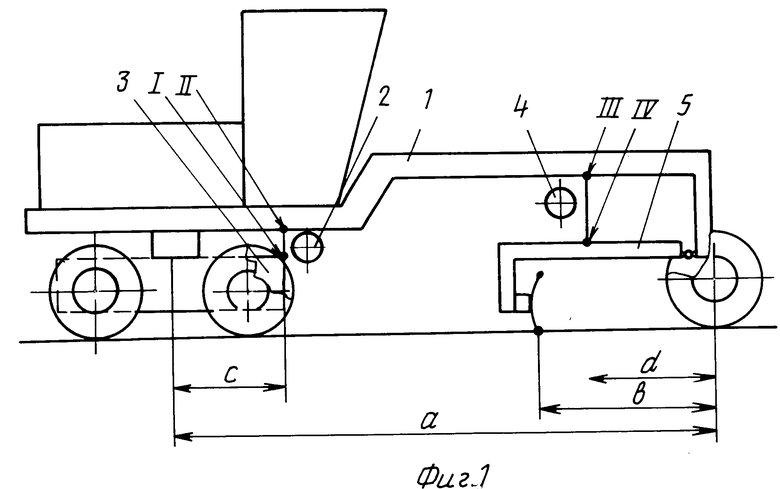

где a - база машины;
b - расстояние от оси переднего моста до отвала;
c - расстояние от оси балансира до датчика;
d - расстояние от оси переднего моста до датчика. а
а
| Переносный кухонный очаг | 1919 |
|
SU180A1 |
| Пуговица | 0 |
|
SU83A1 |
