Изобретение относится к автоматике и может быть использовано в устройствах управления транспортными средствами.
Известны устройства для формирования сигналов управления транспортными средствами, использующие информацию от датчиков, установленных на транспортном средстве и регистрирующих электромагнитное поле, создаваемое проводом с током (SU, авторское свидетельство 976875 кл. G 05 D 1/02, 1981); SU, авторское свидетельство 1262458 кл. G 05 D 1/03, 1985); SU, авторское свидетельство 1317401, кл. G 05 D 1/00, 1986).
Такие системы обеспечивают формирование сигналов управления по результатам измерения значений индукции электромагнитного поля в двух точках транспортного средства. При наличии разности сигналов, регистрируемых в точках измерения, формируется сигнал управления для минимизации отклонения оси транспортного средства от направления прокладки провода с током.
Известно устройство для формирования сигналов управления транспортными средствами на основе информации о значениях индукции магнитного поля, создаваемого ферромагнитной полосой, расположенной вдоль трассы движения транспортного средства (SU, авторское свидетельство, 1177800 кл. G 05 D 1/02, 1984). Работа этого устройства аналогична работе устройства, использующего информацию об электромагнитном поле.
Известны устройства для формирования сигналов управления транспортными средствами, использующие оптическую информацию от светоотражающей полосы, расположенной, вдоль трассы (SU, авторское свидетельство, 708313 кл. G 05 D 1/03, 1978; SU, авторское свидетельство, 1242919, кл. G 05 D 1/02, 1984). Работа этих устройств аналогична работе устройства, использующего информацию об электромагнитном поле.
Во всех вышеописанных устройствах формирование сигналов управления производится на основе подсчета числа оборотов колеса и сравнения результатов измерения двумя датчиками соответствующего физического поля. В этих устройствах предъявляются высокие требования к характеристикам источников физических полей и идентичности регистрирующих их параметры датчиков. В результате необходима большая трудоемкость при создании и обслуживании источников физических полей и регистрирующих их датчиков с целью поддержания требуемой информационной способности устройства для формирования сигналов управления.
Наиболее близкой к заявляемому изобретению является система управления транспортным средством (SU, авторское свидетельство, 1242919, кл. G 05 D 1/02, 1986). Эта система содержит источник информационных сигналов - светоотражающую полосу, датчик пройденного пути, с помощью которого вычисляются координаты транспортного средства вдоль пройденного пути, счетчик команд, блок памяти, датчик слежения, блок сравнения, обеспечивающие формирование сигналов управления транспортным средством. В рассматриваемой системе формирования сигналов управления производится на основе сравнения амплитуд оптических сигналов, получаемых от светоотражающей полосы в двух разнесенных точках на транспортном средстве с помощью двух фотоприемников. Использование результатов сравнения амплитуд информационных сигналов приводит к необходимости обеспечения высоких требований к источнику информации, а именно к его стабильности, а также к линейности, однородности и идентичности характеристик датчиков преобразования информации. В реальных условиях работы вследствие различных факторов - погрешности изготовления колес транспортного средства, проскальзывания колес, разности усилий, создаваемых приводами колес, нелинейности и неиндентичности датчиков преобразования информации и других, возникают погрешности определения положения транспортного средства в плоскости движения и соответственно погрешности формирования сигналов управления.
Техническим результатом осуществления изобретения является повышение точности определения положения транспортного средства и обеспечение возможности измерения его скорости при одновременном снижении требований к источнику информации и датчику слежения, а также упрощение схемы устройства.
Технический результат достигается тем, что в устройство для формирования сигналов управления транспортным средством, содержащее датчик слежения, включающий первый и второй приемники, на которые воздействуют источники информации, введены блок измерения временных интервалов и блок формирования сигналов управления. Источники информации выполнены в виде ряда знаков, расположенных по трассе движения транспортного средства. Каждый знак представляет собою два пересекающихся отрезка линейных источников сигналов, ограниченные по противоположным сторонам от точки пересечения двумя такими же отрезками, перпендикулярными направлению движения. Размеры знака априорно известны, выходы первого, второго приемников соединены соответственно с первым и вторым входами блока измерения временных интервалов, первый, второй, третий и четвертый выходы блока измерения временных интервалов подключены соответственно к первому, второму, третьему и четвертому входам блока формирования сигналов управления, выходы которого являются соответственно выходами устройства, на которых формируются сигналы скорости движения транспортного средства, его координат по оси, совпадающей с направлением движения, и по оси, перпендикулярной ей, а также угла β , где β - угол между продольной осью транспортного средства и направлением движения.
Достижение технического результата обеспечивается измерением и анализом временных интервалов между моментами прохождения приемниками над элементами знака и последующим соотнесением значений этих временных интервалов с априорно известными параметрами знака и расстоянием между точками установки приемников на транспортном средстве. В качестве знаков могут использованы соответствующие светоотражающие знаки, знаки, сформированные проводом с током, ферромагнитные и другие знаки, в качестве приемников соответственно оптические, инфракрасные, индукционные, магниточувствительные и другие преобразователи.
На фиг. 1 изображена структурная схема предлагаемого устройства; на фиг. 2 - вид знака; на фиг. 3 - структурная схема блока измерения временных интервалов.
Устройство (фиг. 1) включает первый 1 и второй 2 приемники, блок 3 измерения временных интервалов, блок 4 формирования сигналов управления. Выходы приемников 1 и 2 соединены соответственно с первым и вторым входами блока 3 измерения временных интервалов, первый, второй, третий и четвертый выходы блока 3 подключены к первому, второму, третьему и четвертому входами блока 4 формирования сигналов управления, выходы которого являются соответственно выходами устройства, на которых формируются сигналы скорости V движения транспортного средства, его координат по оси X, совпадающей с направлением движения, и по оси Z, перпендикулярной ей, а также угла β , где β - угол между продольной осью транспортного средства и направлением движения.
На фиг. 2 ось X совпадает с направлением движения транспортного средства; β - угол между продольной осью транспортного средства и направлением движения; A и B - продольный и поперечный размеры знака; 1 и 2 - приемники, установленные на транспортном средстве; C - расстояние между ними; α - угол между отрезком знака, перпендикулярным направлению движения, и одним из пересекающихся отрезков.
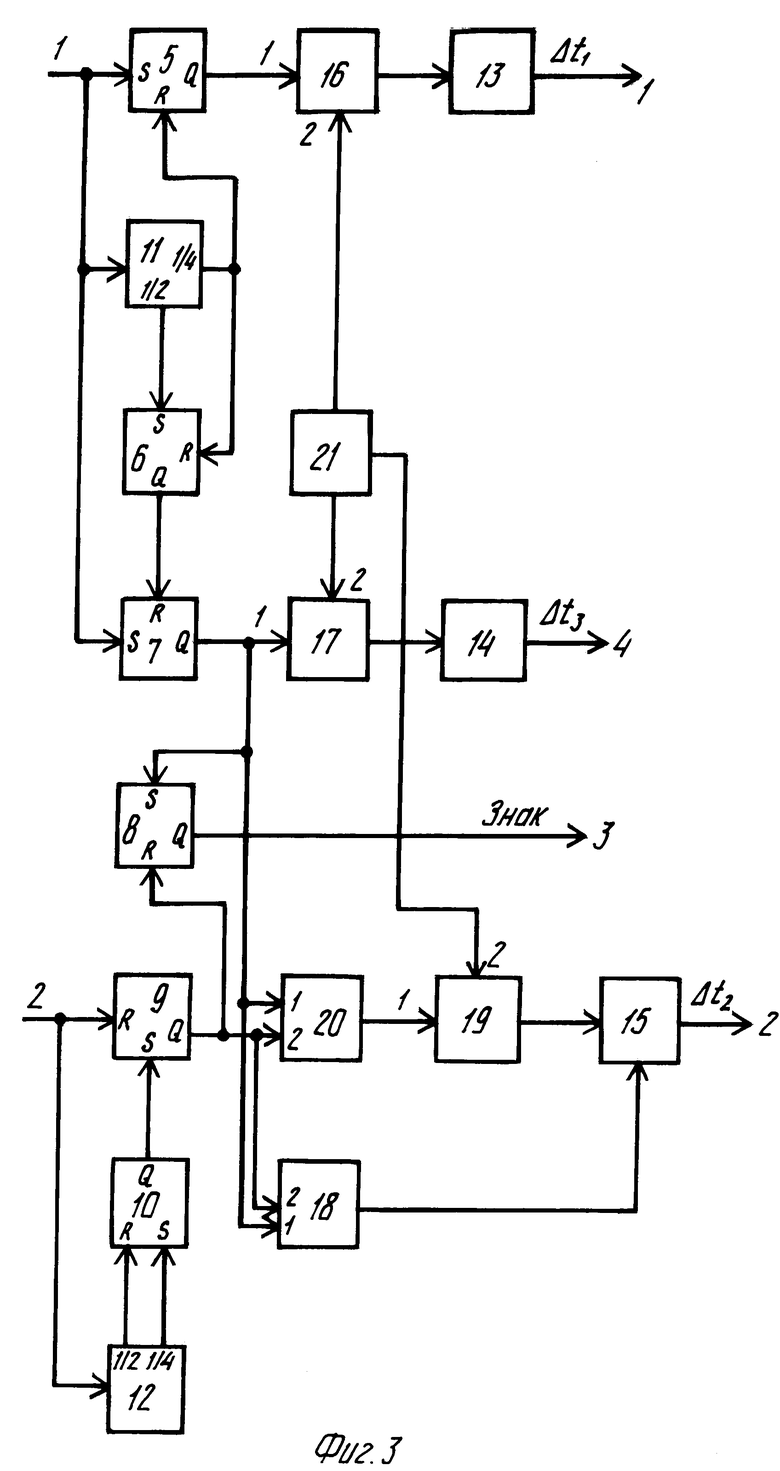
Структурная схема блока 3 измерения временных интервалов содержит шесть RS-триггеров 5 - 10, пять счетчиков 11 - 15 на JK-триггерах, четыре схемы И 16 - 19, схему ИЛИ 20, генератор 21 импульсов.
Устройство позволяет формировать сигналы управления на основе информации о скорости и положении транспортного средства в плоскости движения. Положение транспортного средства в плоскости движения характеризуется тремя параметрами (фиг. 2): координатой X по направлению движения, координатой Z в перпендикулярном направлении и углом β между продольной осью транспортного средства и направлением движения. Информацией, на основе которой вычисляются указанные параметры, являются моменты прохождения приемниками, установленными на транспортном средстве, над элементами знака и интервалы времени между этими моментами. Скорость движения транспортного средства определяется интервалом времени между двумя элементами одного и того же знака, расположенными перпендикулярно направлению движения. Для решения этой задачи достаточно информации, получаемой с выхода, например, приемника 1. Эта информация по мере движения транспортного средства поступает с выхода приемника 1 на первый вход блока 3 измерения временных интервалов, где вычисляется этот временный интервал Δt1, с первого выхода блока 3 сигнал, пропорциональный Δt1, передается на первый вход блока 4 формирования сигналов управления.
В блоке 4 вычисляется скорость как отношение продольного размера знака A к интервалу времени Δt1:
Это значение скорости используется для вычисления координат транспортного средства.
Координата X определяется в момент прохождения приемника над элементом, знака, перпендикулярным направлению движения. Как и в предыдущей задаче, здесь достаточной является информация от одного из приемников, например приемника 1.
В данной задаче интервал времени не вычисляется, а выходной сигнал приемника 1 через блок 3 передается в блок 4 формирования сигналов управления, где поступает в счетчик кадров, а далее производится считывание из блока памяти, входящего в блок 4, координаты X.
Значение угла β между продольной осью транспортного средства и направлением движения оценивается по значению временного интервала между моментами прохождения приемниками 1 и 2 элемента знака, перпендикулярного направлению движения при известном расстоянии C между точками установки этих приемников на транспортном средстве в направлении, перпендикулярном его продольной оси. Для такой оценки сигналы с выходов приемников 1 и 2 поступают соответственно на первый и второй входы блока 3 измерения временных интервалов. В блоке 3 вычисляется этот временный интервал Δt2. Одновременно в блоке 3 определяется знак угла, зависящий от того, с какого приемника (1 или 2) приходит первый сигнал, являющийся началом отсчета временного интервала.
Значение угла β и его знак соответственно с второго и третьего выходов блока 3 поступают на второй и третий входы блока 4 формирования сигналов управления.
В блоке 4 решается задача определения угла β. При малых значениях β:
Для определения координаты Z используют информацию о моментах прохождения одним из приемников, например приемника 1, над элементами знака, перпендикулярного направлению движения, и элементом знака, неколлинеарного с первым. Информация с выхода приемника 1 поступает на первый вход блока 3 измерения временных интервалов, где вычисляется временной интервал Δt3.
Вычисленное значение с четвертого выхода блока 3 передается в блок 4 формирования сигналов управления на четвертый вход. В блоке 4 определяется координата Z. Решение задачи основывается на следующем (фиг. 2):
в треугольнике DEF угол DFE = 180o - 90o - α = 90o - α:
в треугольнике EFG угол EFG = 180o - [180o - 90o - α ] = 90o + α, (угол EGF = 180o - [90o + α] - β = 90o - (α+β).
По теореме синусов:

При малых значениях β:

Следовательно, координата Z при выбранном начале координат в левом углу равна:
Обозначим априорно известные величины
В результате получим:
Система работает следующим образом (фиг. 1 и 3).
Импульсный сигнал, появляющийся при прохождении приемника 1 над первым элементом знака, поступает на первый вход блока 3 и перебрасывает триггер 5 в состояние логической единицы. Сигнал логической единицы с выхода триггера 5 подается на первый вход схемы И 16, обеспечивая прохождение импульсов генератора 21 в счетчик 13 через второй вход схемы И 16. Одновременно сигнал с выхода приемника 1 поступает в счетчик 11. Когда транспортное средство проедет над всеми элементами знака, то в счетчик 11 попадут четыре импульса с выхода первого приемника 1. Выходной сигнал счетчика 11, соответствующий делению на четыре, сбрасывает триггер 5 и тем самым закрывает поступление импульсов в счетчик 13. Содержимое счетчика 13 соответствует временному интервалу Δt, который используется для расчета скорости движения транспортного средства.
Сигнал с выхода первого приемника 1 при прохождении транспортного средства над первым элементом знака перебрасывает триггер 7 в состояние логической единицы. Сигнал с выхода триггера 7 поступает на первый вход схемы И 17, на второй вход которой подаются импульсы с выхода генератора 21, в результате чего начинается заполнение счетчика 14. Сигнал с выхода 1/2 счетчика 11 запускает триггер 6. Сброс триггера 6 осуществляется сигналом с выхода 1/4 счетчика 11. В результате триггер 6 в интервале после второго по четвертый импульсы, поступающие с выхода приемника 1, обеспечивает наличие сигнала "Сброс" на триггере 7, поэтому счетчик 14 производит счет в интервале только между 1 и 2 импульсами с выхода приемника 1, в результате чего со счетчика 14 снимается информация об интервале времени Δt3. Триггер 9 работает аналогично триггеру 7, но управляется от импульсов, поступающих с выхода приемника 2, а элементы 10 и 12 работают аналогично элементам 6 и 11.
Импульсы с выхода триггеров 7 и 9 используются для определения угла β . Первый из пришедших импульсов через схему ИЛИ 20 и схему И 19 обеспечивает прохождение импульсов генератора 21 в счетчик 15. При поступлении импульса от второго приемника срабатывает схема И 18 и сигналом с ее выхода останавливает счетчик 15. Информация в счетчике 15 характеризует угол β .
Для определения знака угла используется триггер 8. В зависимости от того, от какого приемника раньше приходит сигнал, на выходе триггера 8 получают логическую единицу или логический ноль, которые соответствуют знаку " + " или " - ".
Из рассмотрения возможного варианта структурной схемы блока 3 измерения временных интервалов следует: схемная реализация его достаточна проста, а дополнительное резервирование схемы позволяет построить двухканальную систему, что значительно повышает надежность в работе всей системы.
Структурная схема блока 4 формирования сигналов управления строится на известных элементах и включает счетчик команд, например, на триггерах типа JK, и блока памяти, в который заносятся априорно известные параметры знака A, B, C, tg α. На выходе блока 4 формируются сигналы скорости движения транспортного средства и его координат по оси X, совпадающей с направлением движения, и по оси Z, перпендикулярной ей, а также угла β, где β - угол между продольной осью транспортного средства и направлением движения.
Простейшие вычисления скорости, координат X, Z и угла β по приведенным формулам (1 - 3) производятся с помощью известных арифметических устройств, (Тарабрин Б. И. и др. Применение интегральных микросхем в электронной вычислительной технике, 1986).
Такое построение устройства позволяет определить координату Z, а не смещение относительно оси провода с током или светоотражающей линии. При этом можно обеспечить, если позволяет пространство, одновременное движение в несколько рядов, в том числе во встречных направлениях, а также переход на другую трассу для подъезда к заданной точке. Для расчета заданного ряда можно использовать линейный размер знака B, который также хранится в блоке памяти 4 формирования сигналов управления.
Вновь введенные блок измерения временных интервалов и блок формирования сигналов управления строятся на арифметико-логических устройствах и умножителях (Шило В. Популярные цифровые микросхемы. - М., 1985, с. 177 - 181).

Изобретение относится к автоматике и может быть использовано в устройствах управления транспортными средствами. Система содержит два приемника, расположенные на транспортном средстве на линии, перпендикулярной его продольной оси, источники информации (знаки), размещаемые в плоскости движения, выполненные в виде двух пересекающихся отрезков линейных источников сигналов, концы которых по противоположным сторонам от точки пересечения соединены такими же отрезками. В систему введены блок измерения временных интервалов и блок формирования сигналов управления, причем выходы первого и второго приемников соединены соответственно с первым и вторым входами блока измерения временных интервалов, а выходы блока измерения временных интервалов соединены с соответствующими входами блока формирования сигналов управления, выходы которого являются соответственно выходами устройства, на которых формируются сигналы скорости движения транспортного средства, его координат по оси, совпадающей с направлением движения, и по оси, перпендикулярной ей, а также угла β , где β - угол между продольной осью транспортного средства и направлением движения. Основой работы устройства является фиксация моментов времени при прохождении приемниками над элементами знака, измерение временных интервалов между этими моментами и вычисление на основе полученных результатов скорости и координат транспортного средства в плоскости движения. 3 ил.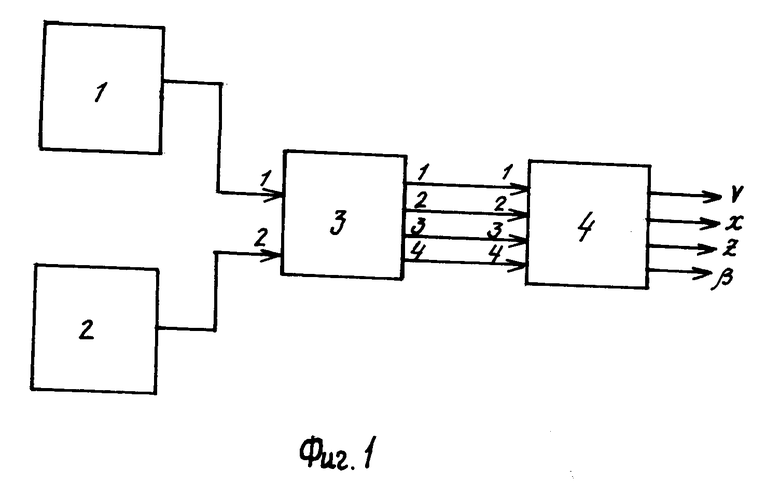
Система управления транспортным средством, содержащая расположенные на трассе знаки и датчик слежения за ними, включающий первый и второй приемники, установленные на транспортном средстве на линии, перпендикулярной его продольной оси, отличающаяся тем, что каждый знак выполнен в виде двух пересекающихся между собой отрезков линейных источников сигналов, концы которых по противоположным сторонам от точки пересечения соединены таким же отрезками, перпендикулярными направлению движению, в систему введены блок измерения временных интервалов и блок формирования сигналов управления, причем выходы первого и второго приемников соединены соответственно с первым и вторым входами блока измерения временных интервалов, выходы которого соединены с соответствующими входами блока формирования сигналов управления, выходы которого являются соответственно выходами устройства, на которых формируются сигналы скорости движения транспортного средства, его координат по оси, совпадающей с направлением движения, и по оси, перпендикулярной ей, а также угла β, где β - угол между продольной осью транспортного средства и направлением движения.
| SU, авторское свидетельство, 1242919, кл | |||
| Кипятильник для воды | 1921 |
|
SU5A1 |
| SU, авторское свидетельство, 708313, кл | |||
| Кипятильник для воды | 1921 |
|
SU5A1 |
| SU, авторское свидетельство, 976875, кл | |||
| Кипятильник для воды | 1921 |
|
SU5A1 |
