Изобретение относится к области комплексного контроля основных датчиков пилотажно-навигационной информации летательного аппарата (ЛА), а именно к полетному контролю построителя вертикали (гировертикали, авиагоризонта), включающего измерители-датчики тангажа, крена и указатель, и датчиков скоростей аппарата, построенных по аэрометрическому, доплеровскому или инерциальному методу [1, с. 263, 318, 353]. Оно может быть использовано для создания высоконадежных и простых аппаратурно неизбыточных пилотажно-навигационных комплексов маневренных ЛА с минимальным составом бортового приборного оборудования, как то дистанционные пилотируемые аппараты и легкие самолеты.
Известен способ контроля гироскопических датчиков и указателей построителя вертикали по соответствию питающих напряжений их номинальным значениям [2, с. 26, 42] . При этом предполагается исправная работа контролируемого прибора, если питающие напряжения или токи в фазах не выходят за пределы поля допуска. Такой контроль реализуется в различных гироприборах с помощью пороговых элементов, реле или электродвигателя с возвратной пружиной, включенных в цепи питания проверяемого прибора. Наибольшее применение на современных ЛА нашло устройство, контролирующее падение напряжения, обрывы в цепях переменного и постоянного тока, называемое сигнализатором нарушения питания (СНП). Преимуществом подобных СНП устройств контроля является простота реализации, надежность, малые вес и габариты, позволяющие иногда размещать их в корпусе контролируемого прибора. К недостаткам, следует отнести невозможность обнаружения отказов сигнальных, корректирующих и других слаботочных цепей и, что самое главное, косвенный характер контроля. Точность работы контролируемого прибора не оценивается.
Известно комплексное устройство полетного контроля построителя вертикали на основе гироскопического авиагоризонта [3, с. 205], включающее блок сравнения сигналов крена и тангажа двух одинаковых авиагоризонтов первого и второго пилотов. Контроль осуществляется путем сравнения выходных сигналов сельсинов-датчиков авиагоризонтов электромеханической следящей системой. При отказе одного из авиагоризонтов происходит рассогласование следящей системы, фиксируемое релейным усилителем, который выполняет функцию компаратора. Устройство обладает сравнительно низкой достоверностью контроля и не определяет какой именно авиагоризонт отказал Для его работы необходимо наличие избыточного числа контролируемых приборов, что ухудшает весовые, габаритные и стоимостные показатели приборного оборудования.
Известно комплексное устройство полетного контроля построителя вертикали на основе использования сигналов датчиков угловых скоростей [4] и тригонометрических функций углов тангажа и крена построителя вертикали. Устройство содержит три датчика угловых скоростей соответственно по поперечной, нормальной и продольной осям связанной системы координат, три дифференциатора, выходы построителя вертикали, пропорциональные синусу и косинусу тангажа, крена, восемь умножителей, три сумматора, три компаратора, и схему ИЛИ. Взаимосвязи элементов устройства позволяют определять проекции абсолютной скорости единичного вектора, ориентированного по вертикали, через проекции угловой скорости в связанной системе координат, определяемые по сигналам датчиков и построителя. При различии между оценками производных изменения проекций по осям связанной системы координат, полученным по выходам построителя вертикали и измерениям датчиков угловых скоростей, определяется отказ построителя вертикали. Устройство не содержит избыточного контрольного состава приборов, но предполагается наличие датчиков угловых скоростей, входящих в систему автоматического управления ЛА. Точность контроля здесь определяется порогом чувствительности датчиков угловых скоростей и погрешностью вычисления производных тригонометрических функций углов тангажа и крена. Медленный завал построителя вертикали со скоростью, меньшей порога и погрешности вычисления производной устройством, не выявляется Информационная производительность устройства сравнительно невелика, так как оно контролирует только тангаж, крен и угловые скорости ЛА. Датчики скорости полета, углов атаки и скольжения не проверяются.
Известно устройство встроенного контроля работоспособности аэрометрического датчика скорости [5, с. 259; 6, с. 181], построенное по принципу тестового контроля. При этом ко входу усилителя отработки сигнала индукционного датчика чувствительного элемента прибора подключается эталонный тест-сигнал. Следящая система вычислителя аэрометрического датчика скорости, состоящая из индукционного датчика манометрических коробок, усилителя, двигателя и функционального потенциометра решающей мостовой схемы, отрабатывает известный эталонный сигнал. По указателю аэрометрического датчика скорости летчик сравнивает индицированное значение скорости с известным и делает вывод об исправности прибора, если оно находится в поле допуска. Недостатком устройства является отсутствие полноты контроля, так как оно не проверяет наименее надежные части аэрометрического датчика скорости - приемники и магистрали передачи давления, манометрические коробки, корректоры. Контроль эпизодический и проводится лишь в одной точке диапазона измерения скорости. Летчик активно участвует в контроле датчика скорости но, при этом, исключается из активной работы по определению параметров полета. Достоверность такого контроля сравнительно невелика и также имеет косвенный характер.
Известно устройство контроля аэрометрического датчика скорости [5, с. 286; 6, с. 186], содержащего цифровой вычислитель. Устройство содержит счетчики циклов исправной работы вычислителя аэрометрического датчика скорости и триггер циклов, которые фиксируют сбои и отказы этого вычислителя при решении им контрольных задач в цикле. Сигнал исправности датчика скорости снимается при четырехкратном повторении неправильного решения тест-задачи вычислителем, контрольное значение которой хранится в памяти вычислителя. Контроль исправности датчика скорости таким устройством проводится все время работы аэрометрического датчика скорости без вмешательства летчика. Однако здесь, как и в предыдущем аналоге, полетный контроль приемников и магистралей передачи давлений от приемников, на корпусе ЛА, до манометрических коробок отсутствует.
Известно устройство для полетного контроля доплеровского датчика скорости [7, с.233, 235], содержащее генератор низкочастотного тест-сигнала, иммитирующего измеряемый полезный сигнал доплеровской частоты. Тест-сигнал модулирует по амплитуде просочившийся из передающего тракта высокочастотный сигнал антенны. В вычислителе доплеровского датчика скорости этот сигнал обрабатывается подобно полезному сигналу скорости ЛА и далее поступает на индикатор, который при исправности прибора должен показать летчику конкретное значение скорости. Устройство контроля работает лишь эпизодически, когда доплеровский датчик скорости работать не может по своему принципу действия. Это так называемый режим "Память". Контроль эпизодический, в одной точке рабочего диапазона измеряемых скоростей, точность работы прибора в полете не оценивается.
Известно устройство для полетного контроля доплеровского датчика скорости с четырехлучевой антенной системой [8, с. 92], содержащее вычислительную систему соотношения выходных частот узкополосной фильтрации. Устройство использует известное соотношение, когда сумма разностей доплеровских частот антенн, кососимметрично расположенных относительно плоскости симметрии ЛА, отнесенная к сумме доплеровских частот антенн, расположенных по одну из сторон этой плоскости, является сравнительно небольшой величиной, определяемой погрешностью системы узкополосной фильтрации. Контроль осуществляется непрерывно, в горизонтальном полете проверяется точность доплеровского датчика скорости. Однако точность такого контроля сравнительно невелика так как зависит от условий работы доплеровского датчика скорости, скольжения и кренов ЛА, несимметрии погрешностей каналов узкополосной фильтрации и естественной флюктуации доплеровских частот антенн в том числе и из-за свойств земной поверхности.
Известно устройство для контроля датчика скорости инерциального типа, построенного на основе интегрирующего маятникового акселерометра [6, с.341, 372], содержащее три квадратора, сумматор на три входа, компаратор и источник постоянного сигнала, пропорционального квадрату угловой скорости вращения Земли. Входы квадраторов устройства соединены с выходами трех взаимно ортогональных акселерометров, расположенных на ЛА, неподвижном относительно Земли, а выходы - с входами сумматора. Компаратор, подключенный к выходу сумматора, сравнивает постоянный сигнал, пропорциональный квадрату угловой скорости вращения Земли, с выходным сигналом сумматора и фиксирует отказ датчиков скорости, если разность этих сигналов больше допустимой. Основными недостатками данного устройства контроля являются: его работоспособность только на неподвижном ЛА, в режиме предстартовой подготовки, необходимость избыточного числа - трех акселерометров.
Известно устройство для полетного контроля аэрометрического датчика скорости [2, с. 92], содержащее устройство сравнения показаний двух идентичных указателей скорости автомата тяги ЛА. Устройство сравнивает отклонения от заданного значения скорости двух аэрометрических систем в компараторах и обеспечивает отключение неисправного датчика скорости. Контроль охватывает все элементы аэрометрических датчиков скорости от приемников воздушного давления до указателей скорости летчиков, имеет высокую точность и достоверность контроля. Однако его применение на легком ЛА затруднено из-за необходимости установки на борт дополнительного комплекта аппаратуры.
Известно устройство комплексного полетного контроля трех построителей вертикали (или трех датчиков скорости), построенное по мажоритарному методу контроля [2, с. 122, 38; 6, с. 194]. Оно содержит кворум-элементы и сигнализаторы напряжений, которые проводят непрерывное сравнение выходных сигналов каждого из трех проверяемых приборов с их осредненным сигналом, полученным на выходе кворум-элемента. При отказе одного из приборов его выходной сигнал будет существенно отличаться от выходного сигнала кворум-элемента. Это позволяет соответствующему сигнализатору напряжений, выполняющему функции компаратора, идентифицировать отказ. Устройства контроля, построенные по мажоритарному методу, находят широкое применение для полетного контроля датчиков ЛА. Они обладают высокой точностью. Обеспечивают отказоустойчивость получения приборной информации об угловой ориентации и скорости летчиком при единичных отказах датчиков. Однако трехкратное резервирование приборного оборудования целесообразно лишь на тяжелых пассажирских ЛА, где безопасность полета имеет первостепенное значение даже при ухудшении веса, стоимости, габаритов и энергопотреблении приборного оборудования. Информационная производительность такого устройства мала, так как оно проверяет только один полетный параметр.
Известно устройство - прототип для комплексного контроля датчиков пилотажной информации [9], содержащее компаратор, выход которого является сигнальным выходом устройства, первый умножитель, второй умножитель и сумматор, подключенный первым информационным входом к выходу первого умножителя, вторым информационным входом - к выходу второго умножителя, а выходом - к входу компаратора, первый и второй входы первого умножителя являются соответственно первым и вторым информационными входами устройства, служащими для подключения соответственно датчика проекции вектора угловой скорости на нормальную ось и датчика проекции вектора скорости на продольную ось связанной системы координат, первый и второй входы второго умножителя являются соответственно третьим и четвертым информационными входами устройства, служащими для подключения соответственно датчика косинуса тангажа и датчика синуса крена, третий информационный вход сумматора является пятым информационным входом устройства, служащим для подключения датчика проекции вектора перегрузки на поперечную ось связанной системы координат. Устройство контроля, выбранное за прототип, обладает высокой информационной производительностью, так как оно использует для своей работы сигналы большого числа датчиков ЛА. Весовые и габаритные показатели качества устройства контроля невелики, что указывает на возможность его применения на легких ЛА.
Недостатком известного устройства-прототипа является низкая достоверность и точность контроля построителя вертикали и датчика скорости. Реализация такого устройства контроля на борту легкого ЛА может усложниться из-за отсутствия соответственно ориентированных датчиков перегрузки и угловых скоростей.
Причиной, препятствующей получению указанного ниже технического результата при использовании известного устройства-прототипа, является применение датчиков перегрузки и угловых скоростей, снижающих надежность устройства контроля, и, как результат, достоверность обнаружения отказов. Обнаружение отказов датчика скорости возможно лишь при наличии угловой скорости ЛА по нормальной оси связанной системы координат, то есть при его маневрировании. Контроль построителя вертикали по углу тангажа затруднен из-за косинусной зависимости его учета в устройстве контроля-прототипе. Чувствительность к изменению угла тангажа при этом наименьшая, а точность контроля - наихудшая. Точность контроля тангажа зависит также от крена ЛА и имеет наихудшее значение в типовом прямолинейном горизонтальном полете.
Основной задачей, на решение которой направлен заявляемый объект - устройство для контроля построителя вертикали и датчиков скоростей летательного аппарата, является повышение достоверности и точности контроля построителя вертикали и датчика скорости при наименьших габаритах, весе, стоимости и составе приборного оборудования на борту легкого, маневренного ЛА.
Указанный технический результат достигается тем, что в устройство для контроля построителя вертикали и датчиков скоростей летательного аппарата, содержащее первый умножитель, входы которого соединены соответственно с выходами датчика синуса крена построителя вертикали и датчика косинуса тангажа построителя вертикали, последовательно соединенные датчик проекции вектора скорости на продольную ось связанной системы координат, второй умножитель, сумматор и компаратор, выход которого является сигнальным выходом устройства введены третий, четвертый, пятый умножители, датчик синуса тангажа построителя вертикали, выход которого соединен со вторым входом второго умножителя, датчик вертикальной скорости, выход которого соединен со вторым вычитающим входом сумматора, датчик проекции вектора скорости на поперечную ось связанной системы координат, выход которого соединен с первым входом третьего умножителя, второй вход которого соединен с выходом первого умножителя, а выход - с третьим вычитающим входом сумматора, датчик косинуса крена построителя вертикали, выход которого соединен с первым входом четвертого умножителя, второй вход которого соединен с выходом датчика косинуса тангажа построителя вертикали, а выход - с первым входом пятого умножителя, датчик проекции вектора скорости на нормальную ось связанной системы координат, выход которого соединен со вторым входом пятого умножителя, выход которого, в свою очередь, соединен с четвертым суммирующим входом сумматора.
Указанный технический результат в частных случаях достигается тем, что датчик проекции вектора скорости на поперечную ось связанной системы координат содержит последовательно соединенные датчик угла скольжения летательного аппарата, первый функциональный преобразователь, шестой умножитель, седьмой умножитель, второй вход которого соединен с выходом датчика проекции вектора скорости на продольную ось связанной системы координат, а второй вход шестого умножителя соединен с выходом второго функционального преобразователя, подключенного к выходу датчика угла атаки летательного аппарата.
Указанный технический результат в частных случаях достигается тем, что датчик проекции вектора скорости на нормальную ось связанной системы координат содержит последовательно соединенные датчик угла атаки летательного аппарата, третий функциональный преобразователь, инвертор и восьмой умножитель, второй вход которого соединен с выходом датчика проекции вектора скорости на продольную ось связанной системы координат.
Совокупность существенных признаков изобретения обеспечивает достижение технического результата, достигаемого при осуществлении изобретения - устройства для контроля построителя вертикали и датчиков скоростей летательного аппарата. При этом сущность изобретения заключается в определении на борту аппарата проекции вектора скорости полета ЛА на вертикальную ось земной системы координат и сравнении ее значения с измеренной вертикальной скоростью, полученной с датчика вертикальной скорости. Проекция вычисляется в устройстве с помощью сигналов тригонометрических функций углов тангажа и крена, полученных с построителя вертикали. При появлении неисправности построителя вертикали или датчиков скоростей летательного аппарата, равенство измеренной и вычисленной вертикальных скоростей нарушается и устройство фиксирует отказ.
Технический результат, в частных случаях заявленного изобретения, дополнительно достигается при контроле аэрометрического датчика скорости, наиболее распространенного на легких маневренных ЛА. Измерение скорости при этом ведется по манометрическому давлению набегающего потока воздуха в приемнике воздушного давления, ось чувствительности которого неизменно ориентирована по продольной оси связанной системы координат летательного аппарата. Аэрометрический датчик скорости измеряет проекцию вектора скорости на продольную ось связанной системы координат. Проекция вектора скорости на поперечную ось связанной системы координат здесь вычисляется по информации об углах атаки, скольжения летательного аппарата и проекции вектора скорости на продольную ось связанной системы координат. Аналогично, проекция вектора скорости на нормальную ось связанной системы координат здесь также вычисляется по вышеуказанной информации об угле атаки и проекции вектора скорости на продольную ось связанной системы координат, полученной соответственно с датчика угла атаки летательного аппарата и аэрометрического датчика скорости ЛА. Контроль аэрометрического датчика скорости с помощью предлагаемого устройства включает и проверку в полете датчиков углов атаки и скольжения ЛА, информация которых используется в соотношениях для определения проекций вектора скорости на поперечную и нормальную оси связанной системы координат.
Проведенный заявителем анализ уровня техники установил, что аналоги, характеризующиеся совокупностями признаков, тождественным всем признакам заявленного устройства для контроля построителя вертикали и датчиков скоростей летательного аппарата, отсутствуют, следовательно, заявленное изобретение соответствует условию "новизна".
Результаты поиска известных технических решений в данной и смежных областях техники с целью выявления признаков, совпадающих с отличительными от прототипа признаками заявленного изобретения, показали, что они не следуют явным образом из уровня техники.
Из определенного заявителем уровня техники не выявлена известность влияния предусматриваемых существенными признаками заявленного изобретения преобразований на достижение указанного технического результата и изобретение не основано на:
- дополнении известного устройства - аналога какой-либо известной частью, присоединенной к нему по известным правилам, для достижения технического результата, в отношении которого установлено влияние именно этого дополнения;
- замене какой-либо части устройства - аналога другой известной частью для достижения технического результата, в отношении которого установлено влияние именно такого дополнения;
- исключении какой-либо части устройства - аналога с одновременным исключением, обусловленной ее наличием функции, и достижением обычного для такого исключения результата;
- увеличении количества однотипных элементов для усиления технического результата, обусловленного наличием в устройстве именно таких элементов;
- выполнении известного устройства - аналога или его части из известного материала для достижения технического результата, обусловленного известными свойствами материала;
- создание устройства, состоящего из известных частей, выбор которых и связь между которыми осуществлены на основании известных правил и достигаемый при этом технический результат обусловлен только известными свойствами частей этого устройства и связей между ними;
- изменении количественного признака (признаков) устройства и предоставлении таких признаков во взаимосвязи либо изменение вида взаимосвязи, если известен факт влияния каждого из них на технический результат и новые значения этих признаков или их взаимосвязь могли быть получены, исходя из известных зависимостей, следовательно, заявленное изобретение соответствует "изобретательскому уровню".
Сущность изобретения поясняется чертежами, где на фиг.1 изображено взаимное положение систем координат Земли, аппарата и его скоростей. На фиг. 1 приняты следующие обозначения:
OX0 Y0 Z0 - земная система координат, центр которой - точка О, расположен в центре масс ЛА, ось ОХ0 - горизонтальная ось направления движения, ось ОY0 - местная вертикаль, а ось ОZ0 - горизонтальная и перпендикулярна направлению движения;
OX Y Z - связанная система координат аппарата, центр которой также расположен в центре масс ЛА, ось ОХ - продольная ось связанной системы координат, параллельна продольной строительной оси ЛА в плоскости его симметрии; ось ОY - нормальная ось связанной системы координат, перпендикулярна оси ОХ и лежит в плоскости симметрии ЛА; ось ОZ - поперечная ось связанной системы координат перпендикулярна плоскости симметрии и направлена в сторону правого крыла;
OXа Yа Zа - скоростная система координат, центр которой в центре масс ЛА, ось ОХа - скоростная ось совпадает по направлению с вектором скорости ЛА; ось OYа - ось подъемной силы, лежит в плоскости симметрии, перпендикулярна ОХа; ось OZа - боковая ось, направлена в сторону правого крыла и перпендикулярна плоскости ОХа Yа.
ψ, υ, γ - углы курса, тангажа и крена определяют взаимное угловое положение систем координат ОХ0 Y0 Z0 и OX Y Z;
α, β - углы атаки и скольжения определяют взаимное угловое положение систем координат ОХ Y Z и ОХа Yа Zа.
Vy0 - вертикальная скорость ЛА; вектор скорости ЛА;
вектор скорости ЛА;
Vx, Vy, Vz - проекции вектора скорости ЛА на оси связанной системы координат.
Очевидно, что вертикальная скорость Vy0 ЛА является суммой проекций Vx, Vy, Vz вектора скорости на вертикальную ось ОY0 земной системы координат. В частности, проектируя Vx на ось ОY0, получаем значение составляющей вертикальной скорости VxSinυ. Проектируя Vy и Vz на вертикальную ось, получаем соответственно остальные две составляющие вертикальной скорости - VyCosυCosγ и -VzCosυSinγ. Результирующее значение вертикальной скорости  имеет вид:
имеет вид:
Учитывая, равенство измеренного значения Vy0 вертикальной скорости, полученного с датчика вертикальной скорости, и вычисленного  полученного через проекции вектора скорости и тригонометрические функции углов тангажа и крена построителя вертикали, можно записать соотношение предлагаемое к реализации в устройстве контроля
полученного через проекции вектора скорости и тригонометрические функции углов тангажа и крена построителя вертикали, можно записать соотношение предлагаемое к реализации в устройстве контроля
VxSinυ+VyCosυCosγ-VzCosυSinγ-Vyo= 0. (2)
В случае контроля аэрометрического датчика скорости, когда с помощью приемника воздушного давления производится непосредственное измерение проекции Vx вектора скорости  а углы атаки α и скольжения β измеряются соответствующими датчиками, предварительно необходимо вычислить проекции Vy и Vz. Для этого следует воспользоваться соотношениями между векторам скорости
а углы атаки α и скольжения β измеряются соответствующими датчиками, предварительно необходимо вычислить проекции Vy и Vz. Для этого следует воспользоваться соотношениями между векторам скорости  углами атаки α и скольжения β, полученными по фиг.1
углами атаки α и скольжения β, полученными по фиг.1
Vx= VCosαCosβ; Vy= -VSinαCoaβ; Vz= VSinβ. (3)
Откуда можно вычислить величину модуля вектора скорости, а затем и искомые проекции Vy, Vz, применяемые в устройстве контроля аэрометрического датчика скорости:
Vy= -Vxtgα; Vz= Vxtgβ/Cosα. (4)
На фиг.2 приведена структурная схема устройства для контроля построителя вертикали и датчиков скоростей аппарата по п.1 формулы, где приняты следующие обозначения:
1-1,1-2,1-3,1-4,1-5 - первый, второй, третий, четвертый, пятый умножители;
2 - датчик синуса крена построителя вертикали;
3 - датчик косинуса тангажа построителя вертикали;
4 - построитель вертикали;
5 - датчик проекции вектора скорости на продольную ось связанной системы координат;
6 - сумматор;
7 - компаратор;
8 - датчик синуса тангажа построителя вертикали;
9 - датчик вертикальной скорости;
10 - датчик проекции вектора скорости на поперечную ось связанной системы координат;
11 - датчик проекции вектора скорости на нормальную ось связанной системы координат;
12 - датчик косинуса крена построителя вертикали.
На фиг.3 приведена структурная схема датчика 10 проекции вектора скорости на поперечную ось связанной системы координат по п.2 формулы, где приняты следующие обозначения:
1-6, 1-7 - шестой и седьмой умножители;
5 - датчик проекции вектора скорости на продольную ось связанной системы координат;
13 - датчик угла скольжения летательного аппарата;
14-1, 14-2 - первый и второй функциональные преобразователи;
15 - датчик угла атаки летательного аппарата.
На фиг.4 приведена структурная схема датчика 11 проекции вектора скорости на нормальную ось связанной системы координат по п.3 формулы, где приняты следующие обозначения:
1-8 - восьмой умножитель;
5 - датчик проекции вектора скорости на продольную ось связанной системы координат;
14-3 - третий функциональный преобразователь;
15 - датчик угла атаки летательного аппарата;
16 - инвертор.
Устройство (фиг.2) для контроля построителя вертикали и датчиков скоростей летательного аппарата содержит умножитель 1-1, входы которого соединены соответственно с выходами датчика 2 синуса крена построителя 4 вертикали и датчика 3 косинуса тангажа построителя 4 вертикали, последовательно соединенные датчик 5 проекции вектора скорости на продольную ось связанной системы координат, умножитель 1-2, сумматор 6 и компаратор 7. Оно также содержит датчик 8 синуса тангажа построителя 4 вертикали, выход которого соединен со вторым входом умножителя 1-2, датчик 9 вертикальной скорости, выход которого соединен со вторым вычитающим входом сумматора 6, датчик 10 проекции вектора скорости на поперечную ось связанной системы координат, выход которого соединен с первым входом умножителя 1-3, второй вход которого соединен с выходом умножителя 1-1, а выход - с третьим вычитающим входом сумматора 6, датчик 12 косинуса крена построителя 4 вертикали, выход которого соединен с первым входом умножителя 1-4, второй вход которого соединен с выходом датчика 3 косинуса тангажа построителя 4 вертикали, а выход - с первым входом умножителя 1-5, датчик 11 проекции вектора скорости на нормальную ось связанной системы координат, выход которого соединен со вторым входом умножителя 1-5, выход которого, в свою очередь, соединен с четвертым суммирующим входом сумматора 6. Выход компаратора 7 является сигнальным выходом устройства контроля.
Датчик 10 проекции вектора скорости (фиг.3) на поперечную ось связанной системы координат содержит последовательно соединенные датчик 13 угла скольжения летательного аппарата, функциональный преобразователь 14-1, умножитель 1-6, умножитель 1-7, второй вход которого соединен с выходом датчика 5 проекции вектора скорости на продольную ось связанной системы координат, а второй вход умножителя 1-6 соединен с выходом функционального преобразователя 14-2, подключенного к выходу датчика 15 угла атаки летательного аппарата.
Датчик 11 проекции вектора скорости (фиг.4) на нормальную ось связанной системы координат содержит последовательно соединенные датчик 15 угла атаки летательного аппарата, функциональный преобразователь 14-3, инвертор 16, умножитель 1-8, второй вход которого соединен с выходом датчика 5 проекции вектора скорости на продольную ось связанной системы координат.
Устройство для контроля построителя вертикали и датчиков скоростей летательного аппарата работает следующим образом. Сигнал с выхода датчика 2 синуса крена построителя 4 вертикали поступает на первый вход умножителя 1-1, на второй вход которого поступает сигнал с выхода датчика 3 косинуса тангажа построителя 4 вертикали. При этом на выходе умножителя 1-1 формируется сигнал, пропорциональный CosυSinγ. На первый вход умножителя 1-3 поступает сигнал с выхода датчика 10 проекции вектора скорости на поперечную ось связанной системы координат, на второй вход - сигнал с выхода умножителя 1-1. При этом на выходе умножителя 1-3 формируется сигнал, пропорциональный VzCosυSinγ. На первый вход умножителя 1-2 поступает сигнал с выхода датчика 5 проекции вектора скорости на продольную ось связанной системы координат, а на второй вход - сигнал с выхода датчика 8 синуса тангажа построителя 4 вертикали. При этом на выходе умножителя 1-2 формируется сигнал, пропорциональный VxSinυ. На первый вход умножителя 1-4 поступает сигнал с выхода датчика 12 косинуса крена, а на второй вход - сигнал с выхода датчика 3 косинуса тангажа построителя 4 вертикали. При этом на выходе умножителя 1-4 получается сигнал, пропорциональный CosυCosγ, который поступает на первый вход умножителя 1-5. На второй вход умножителя 1-5 поступает сигнал с выхода датчика 11 проекции вектора скорости на нормальную ось связанной системы координат. При этом на выходе умножителя 1-5 получается сигнал, пропорциональный VyCosυCosγ. Выходной сигнал Vy0 датчика 9 вертикальной скорости поступает на второй вычитающий вход сумматора 6, на первый суммирующий вход которого одновременно поступает выходной сигнал умножителя 1-2, пропорциональный VxSinυ, на третий вычитающий вход - выходной сигнал умножителя 1-3, пропорциональный VzCosυSinγ, на четвертый суммирующий вход - выходной сигнал умножителя 1-5, пропорциональный VyCosυCosγ. При этом на выходе сумматора 6 формируется сигнал, пропорциональный сумме составляющих проекций вектора скорости на вертикальную ось и инвертированного сигнала датчика 9 вертикальной скорости, который равен нулю при отсутствии отказов построителя 4 вертикали и датчиков 5, 9, 10, 11 скоростей
VxSinυ+VyCosυCosγ-VzCosυSinγ-Vyo= 0. (5)
Выходной сигнал сумматора 6 поступает на вход компаратора 7, выход которого является сигнальным выходом устройства контроля. Компаратор 7 выдает сигнал отказа в том случае, если равенство (5) не выполняется. При этом порог срабатывания компаратора 7 учитывает допустимые погрешности работы исправных построителя 4 вертикали и датчиков 5, 9, 10, 11 скоростей.
В том случае, если контролируется аэрометрический датчик скорости, измеряющий только проекцию Vx вектора скорости  то для работы устройства необходимо вычислять проекции Vy и Vz по информации об углах атаки α и β скольжения летательного аппарата.
то для работы устройства необходимо вычислять проекции Vy и Vz по информации об углах атаки α и β скольжения летательного аппарата.
Датчик 10 проекции вектора скорости на поперечную ось связанной системы координат работает по сигналу датчика 13 угла скольжения летательного аппарата, выходной сигнал которого поступает на вход функционального преобразователя 14-1. Последний реализует функцию tg входного сигнала β. Его выходной сигнал tgβ поступает на первый вход умножителя 1-6, на второй вход которого приходит сигнал, пропорциональный 1/Cosα с выхода функционального преобразователя 14-2. Последний реализует функцию 1/Соs входного сигнала α, полученного с датчика 15 угла атаки летательного аппарата. На выходе умножителя 1-6 получается сигнал, пропорциональный tgβ/Cosα. Он поступает на первый вход умножителя 1-7, на второй вход которого поступает выходной сигнал датчика 5 проекции вектора скорости на продольную ось связанной системы координат. Выходной сигнал умножителя 1-7 получается пропорциональным Vz= Vxtgβ/Cosα и может быть использован для работы заявляемого устройства контроля.
Датчик 11 проекции вектора скорости на нормальную ось связанной системы координат работает по сигналу датчика 15 угла атаки летательного аппарата, выходной сигнал которого поступает на вход функционального преобразователя 14-3. Последний реализует функцию tg входного сигнала α. Его выходной сигнал поступает на вход инвертора 16. После изменения знака, сигнал, пропорциональный - tqα, поступает на первый вход умножителя 1-8, на второй вход которого приходит сигнал датчика 5 проекции вектора скорости на продольную ось связанной системы координат. Выходной сигнал умножителя 1-8 получается пропорциональным Vy=-Vxtgα и может быть использован для работы заявляемого устройства контроля.
Практическая реализация заявляемого устройства контроля возможна программными средствами бортовой цифровой вычислительной машины, например ЦВМ80-400 [10, с. 14], или в микросхемном исполнении так, что умножители 1-1, 1-2, 1-3, 1-4, 1-5, 1-6, 1-7, 1-8 строятся на микросхеме К525ПС2 [11, с. 321], сумматор 6 и инвертор 16 на операционном усилителе К140УД8 [11, с. 286], компаратор 7 на микросхеме 521СА1 или К554СА1 [11, с. 310], функциональные преобразователи 14-1, 14-2, 14-3 на активных диодных функциональных преобразователях [12, с. 116]. Контролируемыми датчиками 2, 3, 8, 12 построителя 4 вертикали могут быть синусно-косинусные трансформаторы курсовертикали, например НКВ-72, или указателя - прибора командного пилотажного типа ПКП-72 [6, с. 368, 378] . Датчик 5 проекции вектора скорости на продольную ось связанной системы координат может быть аэрометрическим измерителем системы воздушных сигналов СВС [6, с. 170] или указателем скорости этой системы с электрическим выходом, пропорциональным перемещению стрелки указателя [6, с. 182, рис. 14.12]. Датчики 10 и 11 проекций вектора скорости на поперечную и нормальную оси связанной системы координат при этом строятся по схемам п.2 и п. 3 формулы (фиг. 3, 4) с применением датчиков 13, 15 углов скольжения и атаки, которые могут быть либо отдельными приборами ЛА, например флюгерными датчиками аэродинамических углов типа ДАУ-85 [13, с. 115], либо входить в состав системы определения высотно-скоростных параметров типа СВС [14].
Как следует из вышеизложенного заявляемое устройство контроля обладает высокой эффективностью по обеспечению непрерывного автоматического полетного контроля основных датчиков пилотажно-навигационной информации легкого маневренного ЛА без привлечения к нему летчика. Оно обладает высокой информационной производительностью, так как одновременно охватывает контролем измеряемые этими датчиками углы тангажа, крена, атаки, скольжения, проекции вектора скорости на продольную ось связанной системы координат (скорость ЛА) и вертикальную ось земной системы координат (скорость снижения или подъема ЛА относительно Земли). Достоверность контроля (при контроле аэрометрического датчика скорости), определяемая как вероятность обнаружения отказа именно контролируемых датчиков, здесь будет Рд 3(500)=0,987833. Это соответствует расчетному времени достоверного контроля Тд 3=40844 часа, которое более, чем на порядок превышает среднее время наработки на отказ проверяемых приборов и в 4,7 раза больше времени достоверного контроля тех же приборов в прототипе. Весовые и габаритные показатели качества, определяемые через отношение веса и габаритов устройства контроля (ЦВМ80-400) к весу и габаритам проверяемой аппаратуры для заявляемого устройства, наименьшие, и составляют соответственно g3= 0,229; v3=0,204. Аналогичные показатели прототипа -gп=0,315; vп= 0,336. Точность полетного контроля построителя вертикали по тангажу (по направлению полета ЛА) в заявляемом устройстве, наибольшая, и повышается с увеличением скорости Vx полета, что следует из выражения для погрешности работы устройств
где  погрешности измерения проекций вектора скорости на нормальную и вертикальную оси аэрометрическим датчиком скорости; Vx = 200 м/с - скорость полета ЛА. Ее значение составляет σευ/= 4 угл.мин, что много меньше ошибок работы проверяемого построителя вертикали или прототипа. Точность полетного контроля построителя вертикали по крену, как и по скорости, в заявляемом устройстве зависит от скорости полета, погрешностей датчиков, углов тангажа, атаки, скольжения. В основном диапазоне углов наклона траектории и скольжения 0-3 угл.град, погрешности работы устройства по контролю крена и скорости достигают соответственно значений σεγ = 5 угл.град., σεV= 3,3 м/c и уменьшаются с ростом скорости полета, наклоном траектории и скольжение ЛА. При контроле аэрометрического датчика скорости, заявляемое устройство способно обнаружить отказы датчиков атаки и скольжения, которые в существующих пилотажно-навигационных комплексах отвечают за сваливание ЛА в штопор и потерю устойчивости полета. В отличии от существующих аналогов, заявляемое устройство проверяет исправность не отдельных частей приборов, а весь тракт измерения соответствующего параметра полета. Это имеет наибольшее значение для аэрометрических датчиков скорости. Заявляемое устройство включает в процесс непрерывного автоматического контроля, без активного участия летчика, основные приборы, в наибольшей мере влияющие на безопасность полета. При этом, критерий исправности (2), реализуемый устройством и учитывающий вертикальную скорость подъема или снижения ЛА, наиболее адекватно определяет опасность отказа приборов, что особенно важно в условиях сложных метеоусловий полета.
погрешности измерения проекций вектора скорости на нормальную и вертикальную оси аэрометрическим датчиком скорости; Vx = 200 м/с - скорость полета ЛА. Ее значение составляет σευ/= 4 угл.мин, что много меньше ошибок работы проверяемого построителя вертикали или прототипа. Точность полетного контроля построителя вертикали по крену, как и по скорости, в заявляемом устройстве зависит от скорости полета, погрешностей датчиков, углов тангажа, атаки, скольжения. В основном диапазоне углов наклона траектории и скольжения 0-3 угл.град, погрешности работы устройства по контролю крена и скорости достигают соответственно значений σεγ = 5 угл.град., σεV= 3,3 м/c и уменьшаются с ростом скорости полета, наклоном траектории и скольжение ЛА. При контроле аэрометрического датчика скорости, заявляемое устройство способно обнаружить отказы датчиков атаки и скольжения, которые в существующих пилотажно-навигационных комплексах отвечают за сваливание ЛА в штопор и потерю устойчивости полета. В отличии от существующих аналогов, заявляемое устройство проверяет исправность не отдельных частей приборов, а весь тракт измерения соответствующего параметра полета. Это имеет наибольшее значение для аэрометрических датчиков скорости. Заявляемое устройство включает в процесс непрерывного автоматического контроля, без активного участия летчика, основные приборы, в наибольшей мере влияющие на безопасность полета. При этом, критерий исправности (2), реализуемый устройством и учитывающий вертикальную скорость подъема или снижения ЛА, наиболее адекватно определяет опасность отказа приборов, что особенно важно в условиях сложных метеоусловий полета.
Кроме указанного достигаемого технического результата и преимуществ следует также отметить дополнительные достоинства. Прежде всего это инвариантность реализации устройства к типу и физическому принципу работы контролируемых датчиков. Оно не требует установки на борт дополнительных измерителей, а использует сигналы уже имеющихся приборов и вычислителя - БЦВМ пилотажно-навигационного комплекса, что снижает вес, габариты, энергопотребление и стоимость авионики аппарата, при высокой безопасности его эксплуатации. Заявляемое устройство контроля обладает наибольшим быстродействием, так как содержит простейшие математические операции с выходными сигналами контролируемых приборов. Контроль датчика скорости охватывает все его элементы - от приемника воздушного давления до указателя скорости, на всех режимах полета летательного аппарата.
Таким образом, приведенные сведения показывают, что при осуществлении заявленного изобретения выполняются следующие условия:
- средство, воплощающее изобретение при его осуществлении, предназначено для использования в области комплексного контроля основных датчиков пилотажно-навигационной информации ЛА, а именно в устройстве для контроля построителя вертикали и датчиков скоростей летательного аппарата;
- для заявленного изобретения в том виде, как оно охарактеризовано в независимом пункте формулы изобретения, подтверждена возможность его осуществления с помощью описанных или других известных до даты подачи заявки средств;
- средство, воплощающее заявленное изобретение при его осуществлении, способно обеспечить получение указанного технического результата.
Следовательно, заявленное изобретение соответствует условию патентоспособности "промышленная применимость".
Источники информации
1. Селезнев В.П. Навигационные устройства. - М.: Машиностроение, 1974, с. 600.
2. Алтухов В.Ю., Стадник В.В Гироскопические приборы, автоматические бортовые системы управления самолетов и их техническая реализация - М.: Машиностроение, 1991 г., с. 160.
3. Бондарчук И. Е., Харин В.И. Авиационное и радиоэлектронное оборудование самолета ЯК-40. - М.: Транспорт, 1982 г., с. 180.
4. Пат. 2106006 РФ, МКИ G 05 B 23/02. Устройство для контроля построителя вертикали и датчиков угловых скоростей В.Ю. Чернов //Б.И. 1998, 6.
5. Авиационные приборы /Под ред. С.С. Дорофеева - М.: Воениздат, 1992 г. , с. 496.
6. Воробьев В.Г., Глухов В.В., Кадышев И.К. Авиационные приборы, информационно-измерительные системы и комплексы. /Под ред. В.Г. Воробьева. - М.: Транспорт, 1992 г., с. 399.
7. Колчинский В.Е., Мандуровский И.А., Константиновский М.И. Автономные допплеровские устройства и системы навигации летательных аппаратов. /Под ред. В.Е. Колчинского.- М.: Сов.радио, 1975 г., с. 432.
8. Флеров A.Г., Тимофеев В.Т. Доплеровские устройства и системы навигации. - М.: Транспорт, 1987 г., с. 191.
9. Пат. 2063647 РФ, МКИ G 05 B 23/05. Устройство для комплексного контроля датчиков пилотажной информации (варианты) /В.Ю. Чернов //Б.И. 1996, 19 (прототип).
10. Реферативный журнал. Воздушный транспорт, 12, 1990 г., с. 14.
11. Аналоговые и цифровые интегральные микросхемы: Справочное пособие С. В. Якубовский, Н. А. Барканов, Л.И. Ниссельсон и др. /Под ред. С.В. Якубовского. 2-е изд. - М.: Радио и связь, 1984 г., с. 432.
12. Смолов В.Б. Функциональные преобразователи информации. Л.: Энергоиздат, 1981 г., с. 248.
13. Авионика России. Энциклопедический справочник. /Под ред. С.Д. Бодрунова СПб.: Национальная Ассоциация авиаприборостроителей, 1999 г., с. 780.
14. Экспресс-информация. Авиастроение. 21, 1993 г. Разработка системы определения высотно-скоростных параметров при больших углах атаки. Development of a pneumatic high-angle-of-attack flush airdata sensing system. Whitmore Stephen A., SAE Techn. Pap. Ser.,. 1991, 911242, 1-31.



Изобретение относится к области комплексного контроля основных датчиков пилотажно-навигационной информации летательного аппарата, а именно к полетному контролю построителя вертикали (гировертикали, авиагоризонта), включающего измерители - датчики тангажа, крена и их указатель, датчиков скоростей аппарата, построенных по аэрометрическому, доплеровскому или инерциальному методу. Устройство контроля содержит пять умножителей, сумматор и компаратор, которые позволяют определить проекцию вектора скорости полета на вертикальную ось земной системы координат и сравнить ее вычисленное значение по углам тангажа, крена построителя с измеренной вертикальной скоростью аппарата. Технический результат заключается в том, что устройство контроля повышает достоверность и точность контроля построителя вертикали и датчиков скоростей при наименьших габаритах, весе, стоимости и составе приборного оборудования на борту легкого и маневренного аппарата. 2 з.п. ф-лы, 4 ил.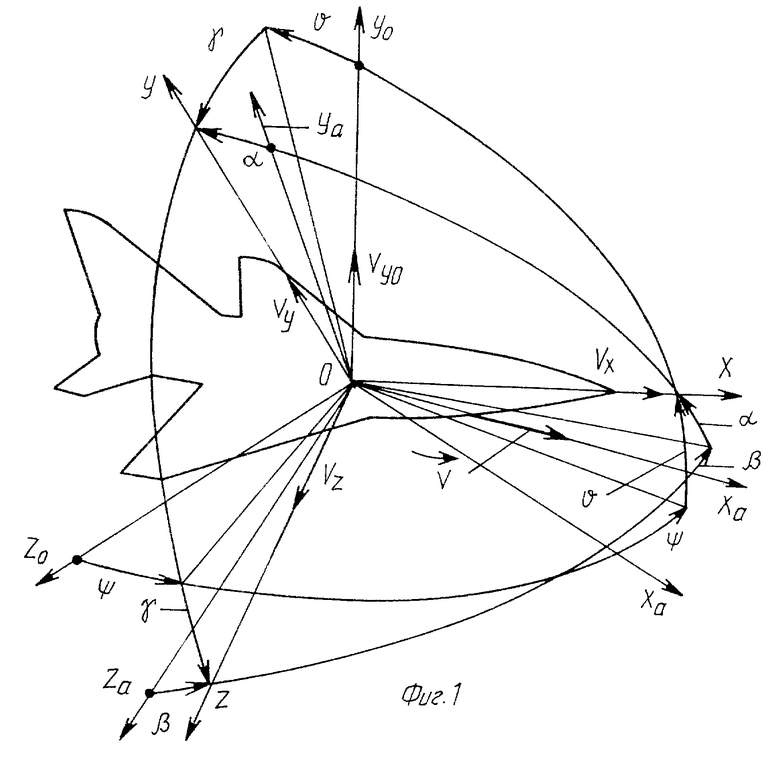
| RU 2063647 C1, 10.07.1996 | |||
| УСТРОЙСТВО ДЛЯ КОНТРОЛЯ ПОСТРОИТЕЛЯ ВЕРТИКАЛИ И ДАТЧИКОВ УГЛОВЫХ СКОРОСТЕЙ | 1996 |
|
RU2106006C1 |
| БЕЛОГОРОДСКИЙ С.Л | |||
| Автоматизация управления посадкой самолета | |||
| - М.: Транспорт, 1972, с.270-271 | |||
| СПОСОБ ОТВОДА ВОДЫ ПРИ ОСУШЕНИИ ГОРНОГО МАССИВА | 1992 |
|
RU2037012C1 |
| US 5576980 А, 19.11.1996. | |||

