Изобретение относится к технологическому оборудованию и предназначено для разметки границ активного слоя в твэлах в процессе их изготовления.
Задачей изобретения является повышение производительности при разметке границ активного слоя в твэлах.
Это достигается тем, что автоматизированный модуль разметки границ активного слоя в твэлах, содержит рентгеновский аппарат, промышленный робот, разметчик, ориентирующее устройство и приспособление для наблюдения, при этом ориентирующее устройство, приспособление для наблюдения и разметчик установлены между рентгеновским аппаратом и промышленным роботом и соединены с ним электрически, причем ориентирующее устройство выполнено в виде вертикально установленной каретки с шарнирно закрепленным приводом, разметчик выполнен в виде подпружиненного пишущего элемента с датчиком нанесения метки и установлен посредством сламывающего рычага на оси низкооборотного двигателя, приспособление для наблюдения выполнено в виде люминесцентной пластины с репером и установленным под углом зеркалом, а промышленный робот содержит две механические руки со схватами, вертикальные направляющие и привод перемещения рук, причем механические руки установлены в вертикальных направляющих и противосторонне присоединены к приводу перемещения рук, а схват каждой из рук выполнен в виде траверсы с дугообразными крюками.
Указанная совокупность признаков является новой и обладает изобретательским уровнем, так как установка вертикально каретки ориентирующего устройства обеспечивает прохождение рентгеновских лучей через твэл и с помощью приспособления для наблюдения быструю ориентацию, а привод, закрепленный шарнирно, создает необходимый момент сил трения для прижатия вращающего ролика к направляющей каретке, что упрощает конструкцию.
Конструкция разметчика позволяет ступенчато регулировать расстояние от вала до пишущего элемента для различных типоразмеров, а установка датчика нанесения метки на сламывающем рычаге - упростить конструкцию и ускорить процесс отметки.
Применение двурукого промышленного робота со схватами в виде траверсы с дугообразными крюками позволяет одновременно один твэл устанавливать, а другой снимать, причем твэлы различной длины, а противостороннее присоединение механических рук к механизму вертикального перемещения позволяет уменьшить габариты и мощность привода за счет взаимной компенсации собственного веса, что упрощает конструкцию.
Электрическая связь рентгеновского аппарата и промышленного робота с ориентирующим устройством и разметчиком обеспечивает одновременную работу промышленного робота по транспортированию твэлов и отметку по рентгеновскому аппарату, а также переключение скорости каретки ориентирующего устройства с подачи на сканирование и наоборот.
На фиг. 1 представлен общий вид модуля, на фиг. 2 - ориентирующее устройство с приспособлением для наблюдения и разметчик.
Автоматизированный модуль разметки твэлов состоит из рентгеновского аппарата 1, промышленного робота 2, разметчика 3, ориентирующего устройства 4 с приспособлением для наблюдения 5, системы управления 6, магазина загрузки-выгрузки 7.
Ориентирующее устройство 4 состоит из каретки 8 с приводом 9, закрепленным шарнирно и прижимающего вращающийся ролик 10 к направляющей 11 каретки 8.
Разметчик 3 состоит из подпружиненного пишущего элемента 12, датчика нанесения метки 13, установленных на оси низкооборотного электродвигателя 14 посредством сламывающего рычага 15.
Приспособление для наблюдения 5, установленное на раме ориентирующего устройства 4, состоит из люминесцентной пластины 16, реперной струны 17 и шарнирно установленного под углом зеркала 18.
Захватное устройство 18 промышленного робота 2 состоит из двух механических рук 20 противостороннего подсоединения к механизму 21 вертикального перемещения, а схват механической руки 20 состоит из траверсы 22 и дугообразных крюков 23.
Автоматизированный модуль разметки твэлов работает следующим образом.
Оператор заполняет магазин загрузки-выгрузки 7 твэлами и с пульта управления 6 включает систему управления модуля. Промышленный робот 2 берет твэл из магазина 7 и устанавливает на каретку 8 ориентирующего устройства 4. Включается привод 9 и каретка 8 на повышенной скорости подается в зону рентгеновского луча рентгеновского аппарата 1, где каретка 8 автоматически переходит на скорость сканирования. При движении реперной струны 17 на люминесцентной пластине 16 оператор, видя в зеркале 18 границу активного слоя твэла, останавливает каретку 8.
Включается электродвигатель 14, который поворачивает сламывающий рычаг 15, и подпружиненный пишущий элемент 12 делает разметку на одном конце твэла. Датчик нанесения метки 13 выдает команду и каретка 8 подает другой конец твэла под разметку.
После разметки границ активного слоя твэла датчик 13 выдает команду готовности промышленного робота 2 и возврата каретки 8 в первоначальное положение.
Пока делалась отметка первого твэла, промышленный робот 2 доставил в зону загрузки каретки следующий твэл.
При возврате каретки 8 в первоначальное положение включается привод механизма 21 вертикального перемещения и захватное устройство 19 с помощью сватов снимает размеченный твэл и устанавливает новый.
После этого цикл повторяется.
Конструктивные особенности элементов, их взаимосвязь и расположения позволили создать надежный, требуемой производительности автоматизированный модуль разметки твэлов.
Удалось резко уменьшить воздействие на оператора воздуха, ионизированного рентгеновскими лучами, повысить технический уровень производства. Фактическая производительность увеличилась в 5,3 раза.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ ТВЭЛ | 1998 |
|
RU2154315C2 |
| АВТОМАТИЧЕСКАЯ ЛИНИЯ КОНТРОЛЯ ИЗДЕЛИЙ | 1997 |
|
RU2128111C1 |
| УСТРОЙСТВО КОНТРОЛЯ ТОЛЩИНЫ ВНУТРЕННЕЙ ОБОЛОЧКИ ТВЭЛА | 1994 |
|
RU2079172C1 |
| СТЕНД ДЛЯ ИСПЫТАНИЙ ИЗДЕЛИЙ НА УДАР | 1992 |
|
RU2104509C1 |
| ЛИНИЯ ПОДГОТОВКИ ТЕПЛОВЫДЕЛЯЮЩИХ ЭЛЕМЕНТОВ К СБОРКЕ В ТЕПЛОВЫДЕЛЯЮЩИЕ СБОРКИ | 1996 |
|
RU2127002C1 |
| СТАНОК ДЛЯ СБОРКИ ТЕПЛОВЫДЕЛЯЮЩИХ ЭЛЕМЕНТОВ В ТЕПЛОВЫДЕЛЯЮЩИЕ СБОРКИ | 1995 |
|
RU2099167C1 |
| ЗАХВАТНОЕ УСТРОЙСТВО ДЛЯ ГРУЗА С ОТВЕРСТИЕМ | 1995 |
|
RU2096305C1 |
| МАНИПУЛЯТОР ДЛЯ ТЕПЛОВЫДЕЛЯЮЩИХ СБОРОК ЯДЕРНОГО РЕАКТОРА | 1996 |
|
RU2113343C1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ ТОЛЩИНЫ ТВЭЛОВ | 1994 |
|
RU2069838C1 |
| СТАНОК ДЛЯ СБОРКИ ТЕПЛОВЫДЕЛЯЮЩИХ ЭЛЕМЕНТОВ В ТЕПЛОВЫДЕЛЯЮЩИЕ СБОРКИ | 1992 |
|
RU2065350C1 |

Изобретение относится к технологическому оборудованию и предназначено для разметки границ активного слоя в твэлах в процессе их изготовления. Сущность изобретения: между рентгеновским аппаратом и промышленным роботом установлены ориентирующее устройство с приспособлением для наблюдения и разметчик, соединенные электрически с рентгеновским аппаратом и промышленным роботом. Ориентирующее устройство представляет собой вертикально установленную каретку с приводом, закрепленным шарнирно, разметчик представляет собой подпружиненный пишущий элемент, закрепленный вместе с датчиком нанесения метки на оси низкооборотного электродвигателя посредством сламывающего рычага. Приспособление для наблюдения выполнено в виде люминесцентной пластины с репером и зеркалом, шарнирно установленным под углом. Захватное устройство промышленного робота представляет собой две механических руки со схватами, установленные в вертикальных направляющих и противосторонне подсоединенные к приводу перемещения рук, а схват каждой представляет траверсу с дугообразными крюками. 2 илт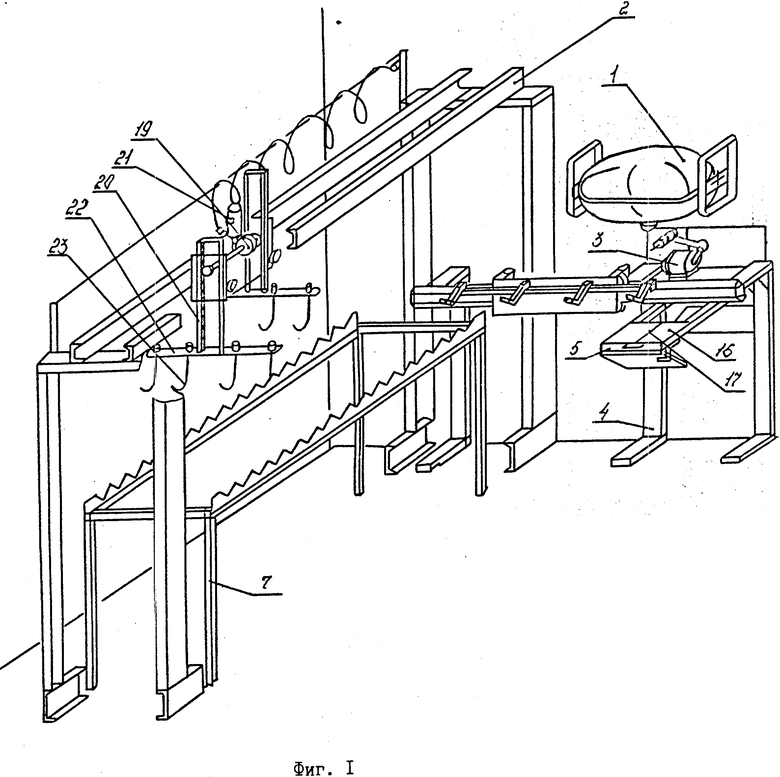
Автоматизированный модуль разметки границ активного слоя в твэлах, содержащий рентгеновский аппарат, промышленный робот, разметчик, ориентирующее устройство и приспособление для наблюдения, при этом ориентирующее устройство, приспособление для наблюдения и разметчик установлены между рентгеновским аппаратом и промышленным роботом и соединены с ним электрически, причем ориентирующее устройство выполнено в виде вертикально установленной каретки с шарнирно закрепленным приводом, разметчик выполнен в виде подпружиненного пишущего элемента с датчиком нанесения метки и установлен посредством сламывающего рычага на оси низкооборотного электродвигателя, приспособление для наблюдения выполнено в виде люминесцентной пластины с репером и установленным под углом зеркалом, а промышленный робот содержит две механические руки со схватами, вертикальные направляющие и привод перемещения рук, причем механические руки установлены в вертикальных направляющих и противосторонне подсоединены к приводу перемещения рук, а схват каждой из рук выполнен в виде траверсы с дугообразными крюками.

