Изобретение относится к области подъемно-транспортного оборудования, в частности к устройствам для захвата и транспортировки грузов.
Известно захватное устройство для груза с отверстием, содержащее полый корпус с захватными элементами, выполненный с  образными пазами и жестко закрепленными на корпусе пальцами, размещенную в корпусе ось, подвижную в вертикальном направлении для взаимодействия своей нижней частью, выполненной снизу с кольцевым выступом, с захватными органами, несущую серьгу для навешивания на крюк грузоподъемного механизма, свободно установленную на корпусе втулку, выполненную с N образными пазами, в которых размещены пальцы корпуса, и c образными пазами, и ручки, размещенные в
образными пазами и жестко закрепленными на корпусе пальцами, размещенную в корпусе ось, подвижную в вертикальном направлении для взаимодействия своей нижней частью, выполненной снизу с кольцевым выступом, с захватными органами, несущую серьгу для навешивания на крюк грузоподъемного механизма, свободно установленную на корпусе втулку, выполненную с N образными пазами, в которых размещены пальцы корпуса, и c образными пазами, и ручки, размещенные в  - образных пазах корпуса и c образных пазах втулки.
- образных пазах корпуса и c образных пазах втулки.
Известное устройство обеспечивает надежный захват груза, однако выполнение захватных элементов в виде шариков и наличие двойного перемещения подвижной оси, необходимого для надежного захвата и фиксации груза и осуществляемого как в направлении продольной оси корпуса, так и вокруг нее, приводит к тому, что взаимодействие захватных органов с грузом происходит по точке, что не исключает повреждение груза; взаимодействие подвижной оси с захватными органам при ее повороте приводит к дополнительному динамическому воздействию на внутреннюю поверхность груза (прокатывание шариков), при котором также не исключено повреждение груза.
Возможность повреждения груза снижает эксплуатационные характеристики захватного устройства, что является недостатком известной конструкции.
Техническим результатом изобретения является повышение эксплуатационных характеристик захватного устройства.
Указанный технический результат достигается тем, что в захватном устройстве для груза с отверстием, содержащим полый корпус с захватными элементами, выполненный с  образными пазами и жестко закрепленными на корпусе пальцами, размещенную в корпусе ось, подвижную в вертикальном направлении для взаимодействия своей нижней частью, выполненной снизу с кольцевым выступом, с захватными органами, несущую серьгу для навешивания на крюк грузопдъемного механизма, свободно установленную на корпусе втулку, выполненную с N образными пазами, в которых размещены корпуса, и c - образными пазами, и ручки, размещенные в
образными пазами и жестко закрепленными на корпусе пальцами, размещенную в корпусе ось, подвижную в вертикальном направлении для взаимодействия своей нижней частью, выполненной снизу с кольцевым выступом, с захватными органами, несущую серьгу для навешивания на крюк грузопдъемного механизма, свободно установленную на корпусе втулку, выполненную с N образными пазами, в которых размещены корпуса, и c - образными пазами, и ручки, размещенные в  образных пазах корпуса и c - образных пазах втулки, нижняя часть оси выполнена с участками поверхности прямоугольной формы и кольцевой выточкой для поочередного взаимодействия с захватными элементами и с дополнительным кольцевым выступом, размещенным над участками поверхности прямоугольной формы с возможностью взаимодействия с корпусом, а верхняя часть оси выполнена с поперечными пазами, расположенными диаметрально противоположно друг другу, и снабжена вкладышем, установленным с возможностью поворота относительно продольной оси корпуса, и дополнительными пальцами, жестко закрепленными во вкладыше и размещенными в поперечных пазах оси, при этом ручки жестко закреплены во вкладыше, а поперечные пазы оси выполнены в направлении, совпадающем с направлением перемещения ручек в горизонтальных участках
образных пазах корпуса и c - образных пазах втулки, нижняя часть оси выполнена с участками поверхности прямоугольной формы и кольцевой выточкой для поочередного взаимодействия с захватными элементами и с дополнительным кольцевым выступом, размещенным над участками поверхности прямоугольной формы с возможностью взаимодействия с корпусом, а верхняя часть оси выполнена с поперечными пазами, расположенными диаметрально противоположно друг другу, и снабжена вкладышем, установленным с возможностью поворота относительно продольной оси корпуса, и дополнительными пальцами, жестко закрепленными во вкладыше и размещенными в поперечных пазах оси, при этом ручки жестко закреплены во вкладыше, а поперечные пазы оси выполнены в направлении, совпадающем с направлением перемещения ручек в горизонтальных участках  образных пазов корпуса, причем корпус выполнен с прямоугольными пазами, расположенными напротив участков поверхности прямоугольной формы оси, а захватные элементы выполнены в виде двуплечих рычагов и размещены в прямоугольных пазах корпуса с возможностью ограниченного поворота.
образных пазов корпуса, причем корпус выполнен с прямоугольными пазами, расположенными напротив участков поверхности прямоугольной формы оси, а захватные элементы выполнены в виде двуплечих рычагов и размещены в прямоугольных пазах корпуса с возможностью ограниченного поворота.
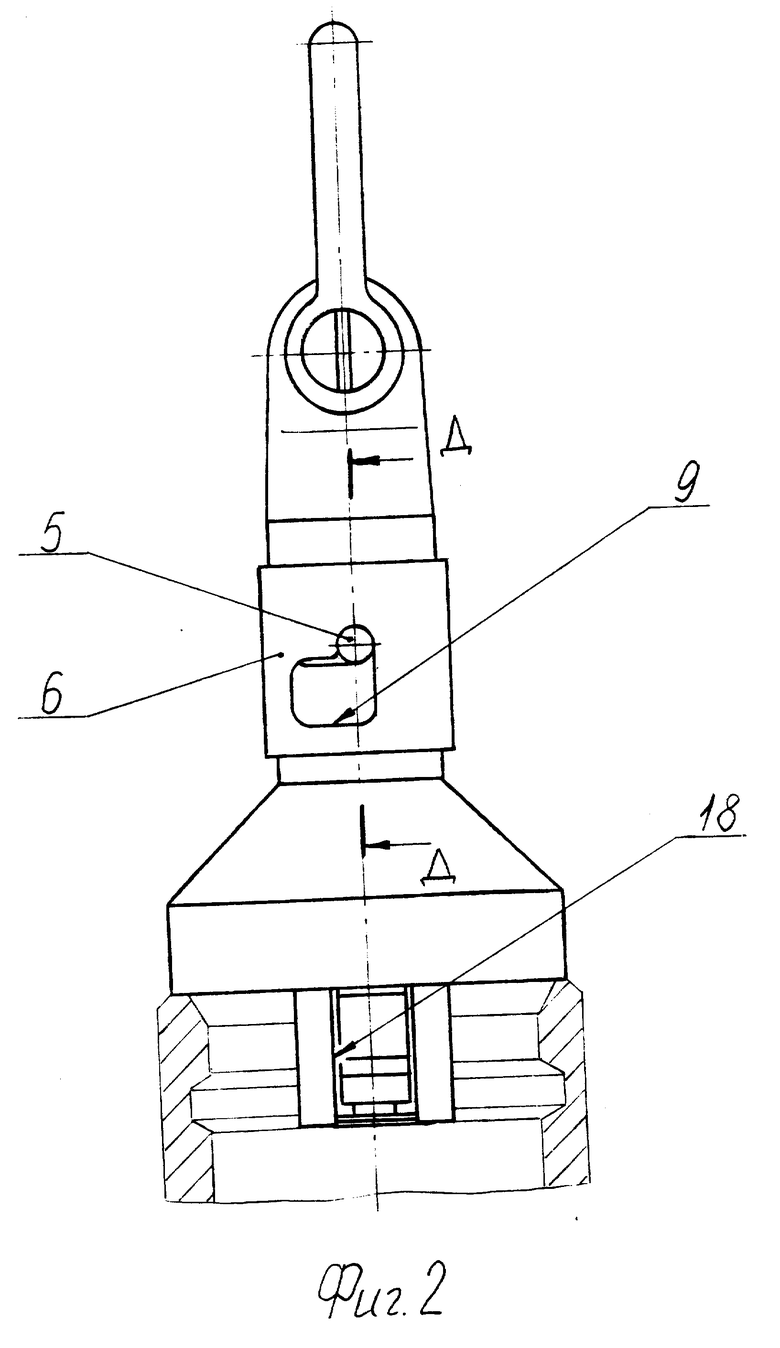
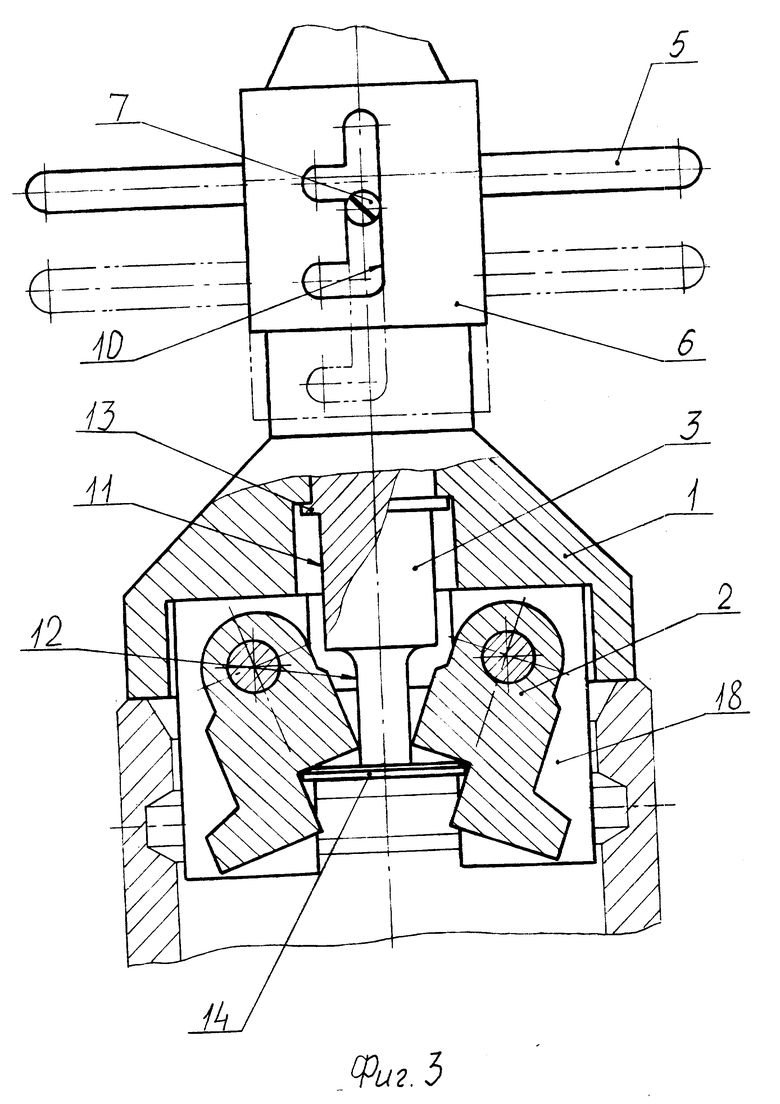
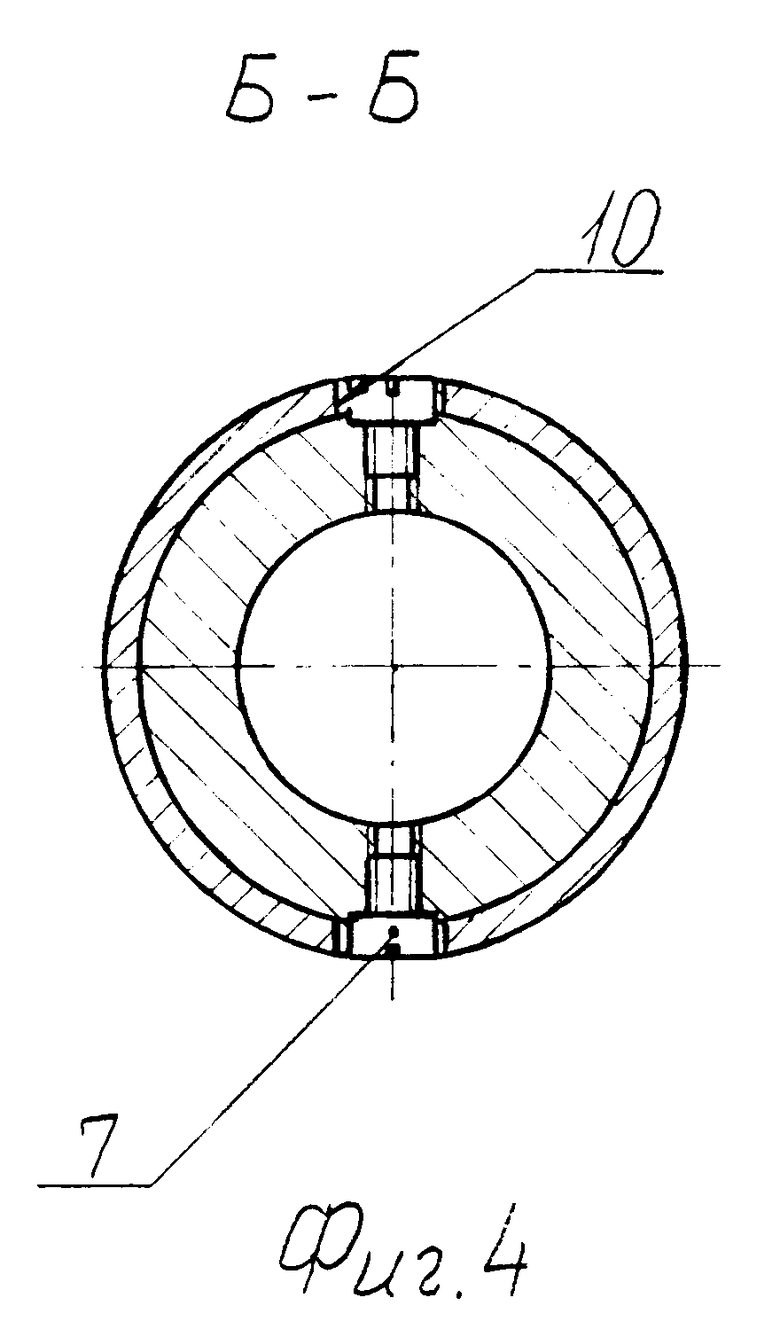
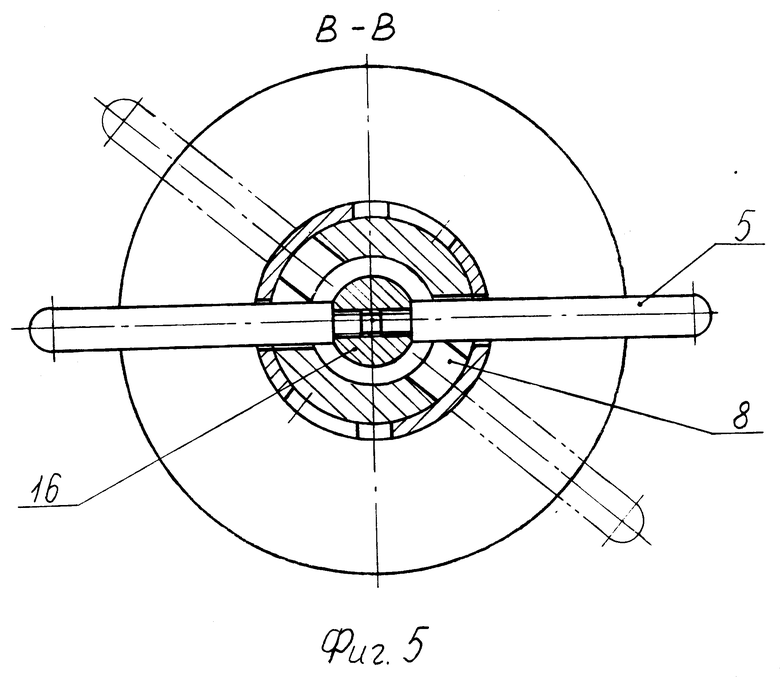
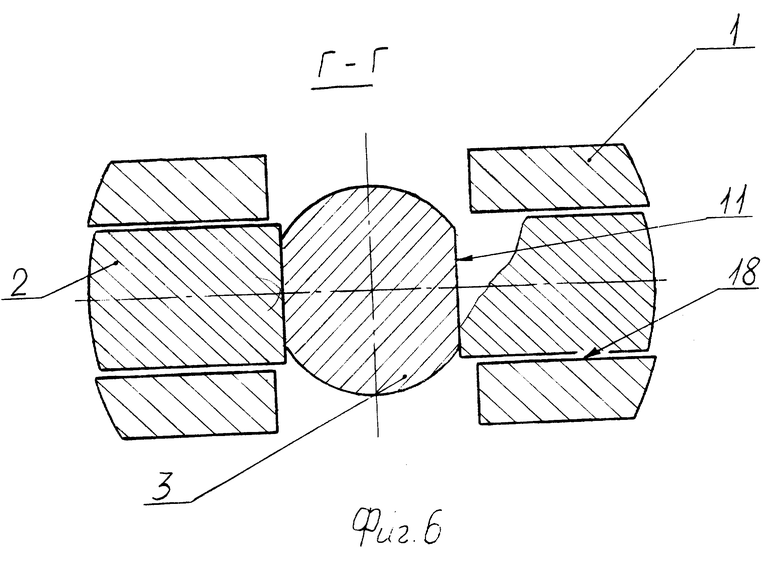
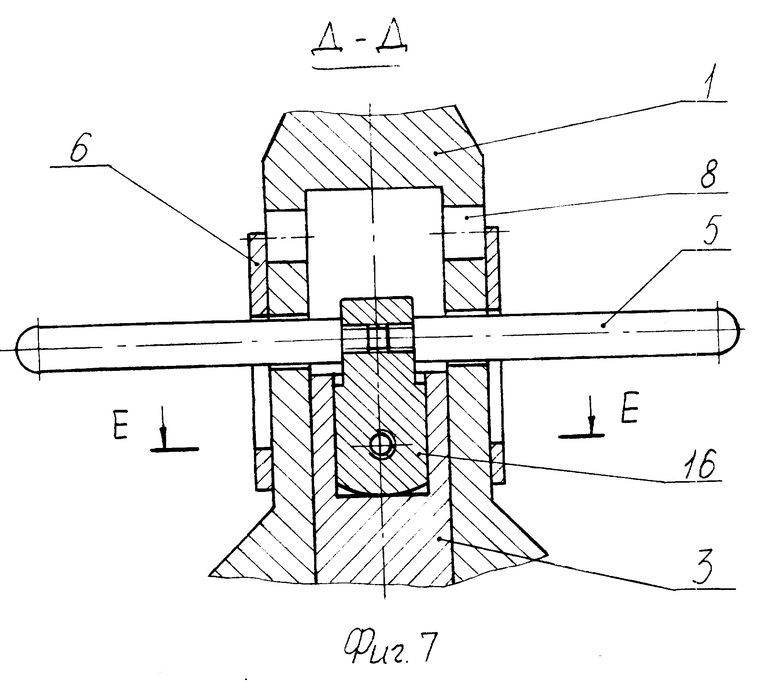
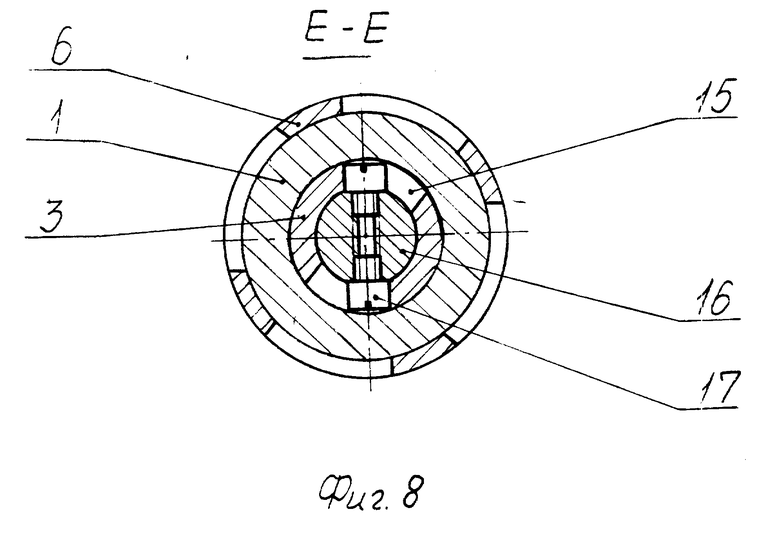
Захватное устройство представлено на фиг. 1 8, где на фиг. 1 общий вид устройства при нижнем (рабочем) положении подвижной оси; на фиг. 2 вид по стрелке А на фиг. 1; на фиг. 3 общий вид устройства при верхнем положении подвижной оси; на фиг. 4 сечение Б-Б на фиг. 1; на фиг. 5 разраз В-В на фиг. 1; на фиг. 6 сечение Г-Г на фиг. 1; на фиг. 7 сечение Д-Д на фиг. 2; на фиг. 8 сечение Е-Е на фиг. 7.
Захватное устройство для груза с отверстием содержит полый корпус 1, захватные элементы 2, подвижную ось 3, нижняя часть которой предназначена для взаимодействия с захватными элементами 2, выполненными в виде двуплечих рычагов, несущих серьгу 4 для навешивания на крюк грузоподъемного механизма, ручки 5 и свободно установленную на корпусе втулку 6.
Корпус 1 снабжен жестко закрепленными на нем пальцами 7 и  образными пазами 8, а свободно установленная на корпусе втулка 6 снабжена c - образными пазами 9 и N образными пазами 10, в которых размещены пальцы 7 корпуса 1, при этом ручки 5 размещены в
образными пазами 8, а свободно установленная на корпусе втулка 6 снабжена c - образными пазами 9 и N образными пазами 10, в которых размещены пальцы 7 корпуса 1, при этом ручки 5 размещены в  образных пазах корпуса 1 и c - образных пазах втулки 6.
образных пазах корпуса 1 и c - образных пазах втулки 6.
Нижняя часть подвижной оси 3 выполнена с участками поверхности прямоугольной формы 11 и кольцевой выточкой 12, предназначенными для поочередного взаимодействия с захватными элементами 2 и ограниченными сверху кольцевым выступом 13, предназначенным для взаимодействия с корпусом 1, а снизу кольцевым выступом 14, предназначенным для взаимодействия с захватными элементами 2, причем верхняя часть подвижной оси 3 выполнена с поперечными пазами 15, расположенными диаметрально противоположно друг другу, и снабжена вкладышем 16, установленным с возможностью поворота относительно продольной оси корпуса.
Во вкладыше 16 жестко закреплены ручки 5 и пальцы 17, размещенные в поперечных пазах 15 подвижной оси 3, выполненных в направлении, совпадающем с направлением перемещения ручек в горизонтальных участках  образных пазов 8 корпуса 1.
образных пазов 8 корпуса 1.
В корпусе 1 выполнены прямоугольные пазы 18, расположенные напротив участков поверхности прямоугольной формы 11 подвижной оси 3 и предназначенные для размещения в них с возможностью ограниченного вращением захватных элементов 2, выполненных в виде двуплечих рычагов.
Захватное устройство работает следующим образом.
Перед установкой захватного устройства в отверстие груза происходит следующее: подвижная ось 3 поднята вверх и зафиксирована в верхнем горизонтальном участке  образного паза 8 корпуса 1 ручками 5 вкладыша 16 подвижной оси 3; подвижная втулка 6 фиксирует ручки 5 в верхнем горизонтальном участке
образного паза 8 корпуса 1 ручками 5 вкладыша 16 подвижной оси 3; подвижная втулка 6 фиксирует ручки 5 в верхнем горизонтальном участке  образного паза 8 корпуса 1 вертикальным участком c образного паза 9 и стопорится пальцем 7 корпуса 1 в вертикальном участке N образного паза 10 (см. фиг. 2, 3); захватные элементы 2 повернуты в пазах 18 корпуса 1 и не выходят за его габариты, взаимодействуя при этом с кольцевой выточкой 12 и кольцевым выступом 14 подвижной оси 3 (см. фиг. 3).
образного паза 8 корпуса 1 вертикальным участком c образного паза 9 и стопорится пальцем 7 корпуса 1 в вертикальном участке N образного паза 10 (см. фиг. 2, 3); захватные элементы 2 повернуты в пазах 18 корпуса 1 и не выходят за его габариты, взаимодействуя при этом с кольцевой выточкой 12 и кольцевым выступом 14 подвижной оси 3 (см. фиг. 3).
После установки захватного устройства в отверстие груза, подвижную втулку 6 поднимают вверх до упора и поворачивают до упора, при этом палец 7 перемещается по вертикальному и горизонтальному участкам N образного паза 10, а ручки 5 вкладыша 16 подвижной оси 3 расфиксируются, оказываясь в нижней части горизонтального участка c образного паза 9 втулки 6.
Ручки 5 перемещают по верхнему горизонтальному участку  образного паза 8 корпуса 1 до упора ручек 5 в вертикальный участок паза 8, при этом происходит следующее:
образного паза 8 корпуса 1 до упора ручек 5 в вертикальный участок паза 8, при этом происходит следующее:
пальцы 17 вкладыша 16 перемещаются в поперечных пазах 15 подвижной оси 3;
палец 7 корпуса 1 перемещается по горизонтальному участку N образного паза 10 до его вертикального участка, после чего втулка 6 сама опускается до упора ручек 5 в верхнюю часть горизонтального участка c образного паза 9 подвижной втулки 6.
Ручки 5 перемещают вниз по вертикальному участку  образного паза 8 корпуса 1, при этом подвижная ось 3 опускается в корпусе 1 и участками поверхности прямоугольной формы 11 поворачивает захватные элементы 2 в прямоугольных пазах 18 корпуса 1 до осуществления захвата груза (см. фиг. 6).
образного паза 8 корпуса 1, при этом подвижная ось 3 опускается в корпусе 1 и участками поверхности прямоугольной формы 11 поворачивает захватные элементы 2 в прямоугольных пазах 18 корпуса 1 до осуществления захвата груза (см. фиг. 6).
Ручки 5 перемещают по нижнему горизонтальному участку  образного паза 8 корпуса 1, при этом втулка 6 остается неподвижной (палец 7 корпуса 1 взаимодействует с вертикальным участком N образного паза 10 втулки 6). Когда руки 5 оказываются у вертикального участка c образного паза 9, втулка сама опускается и фиксирует ручки 5, а палец 7 корпуса 1 занимает крайнее положение вертикальном участке N образного паза 10 втулки 6 (см. фиг. 1 и 2).
образного паза 8 корпуса 1, при этом втулка 6 остается неподвижной (палец 7 корпуса 1 взаимодействует с вертикальным участком N образного паза 10 втулки 6). Когда руки 5 оказываются у вертикального участка c образного паза 9, втулка сама опускается и фиксирует ручки 5, а палец 7 корпуса 1 занимает крайнее положение вертикальном участке N образного паза 10 втулки 6 (см. фиг. 1 и 2).
Затем осуществляется зацепление с крюком грузоподъемной машины и первого груза.
Для снятия захватного устройства с груза ручки 5 расфиксируют, поднимая и поворачивая до упора втулку 6, а затем осуществляют операции в обратной последовательности.
| название | год | авторы | номер документа |
|---|---|---|---|
| СТЕНД ДЛЯ ИСПЫТАНИЙ ИЗДЕЛИЙ НА УДАР | 1992 |
|
RU2104509C1 |
| ЗАХВАТ-КАНТОВАТЕЛЬ ДЛЯ ГРУЗОВ ЦИЛИНДРИЧЕСКОЙ ФОРМЫ С ЦЕНТРАЛЬНЫМ ОТВЕРСТИЕМ | 1994 |
|
RU2116239C1 |
| ЛИНИЯ ПОДГОТОВКИ ТЕПЛОВЫДЕЛЯЮЩИХ ЭЛЕМЕНТОВ К СБОРКЕ В ТЕПЛОВЫДЕЛЯЮЩИЕ СБОРКИ | 1996 |
|
RU2127002C1 |
| МАНИПУЛЯТОР ДЛЯ ТЕПЛОВЫДЕЛЯЮЩИХ СБОРОК ЯДЕРНОГО РЕАКТОРА | 1996 |
|
RU2113343C1 |
| ЭЛЕКТРИЧЕСКИЙ ЭЛЕМЕНТ И СПОСОБ ЕГО ГЕРМЕТИЗАЦИИ | 1992 |
|
RU2024115C1 |
| ЭЛЕКТРИЧЕСКИЙ ЭЛЕМЕНТ И СПОСОБ ЕГО ГЕРМЕТИЗАЦИИ | 1993 |
|
RU2095892C1 |
| РЕЖУЩАЯ ГОЛОВКА ЭЛЕКТРОБРИТВЫ | 1995 |
|
RU2101166C1 |
| ДИСКОВЫЙ ТОРМОЗ | 1994 |
|
RU2087769C1 |
| ДАТЧИК МАКСИМАЛЬНОГО УСКОРЕНИЯ | 1995 |
|
RU2107920C1 |
| УСТРОЙСТВО ДЛЯ ИЗГОТОВЛЕНИЯ ИЗДЕЛИЙ ТИПА ПОЛЫХ КОЛЬЦЕВЫХ СТАКАНОВ | 1992 |
|
RU2071864C1 |
Использование: в подъемно-транспортном оборудовании. Сущность изобретения: нижняя часть подвижной оси 3 выполнена с участками поверхности прямоугольной формы 11 и кольцевой выточки 12, предназначенными для поочередного взаимодействия с захватными элементами 2 и ограниченными сверху и снизу кольцевыми выступами 13 и 14, предназначенными для взаимодействия соответственно с корпусом 1 и с захватными элементами 2, а верхняя часть подвижной оси 3 снабжена поперечными пазами, расположенными противоположно друг другу, и вкладышем, подвижным вокруг продольной оси корпуса 1, при этом во вкладыше жестко закреплены ручки 5 и пальцы, причем пальцы вкладыша размещены в поперечных пазах подвижной оси 3, выполненных в направлении, совпадающем с направлением перемещения ручек 5 в горизонтальных участках  - образных пазов 8 корпуса 1, а захватные элементы 2 выполнены в виде двуплечих рычагов, при этом корпус 1 выполнен с проямоугольными пазами 18, расположенными напротив участков поверхности прямоугольной формы 11, а двуплечие рычаги размещены в прямоугольных пазах 18 корпуса 1 с возможностью ограниченного поворота. 8 ил.
- образных пазов 8 корпуса 1, а захватные элементы 2 выполнены в виде двуплечих рычагов, при этом корпус 1 выполнен с проямоугольными пазами 18, расположенными напротив участков поверхности прямоугольной формы 11, а двуплечие рычаги размещены в прямоугольных пазах 18 корпуса 1 с возможностью ограниченного поворота. 8 ил.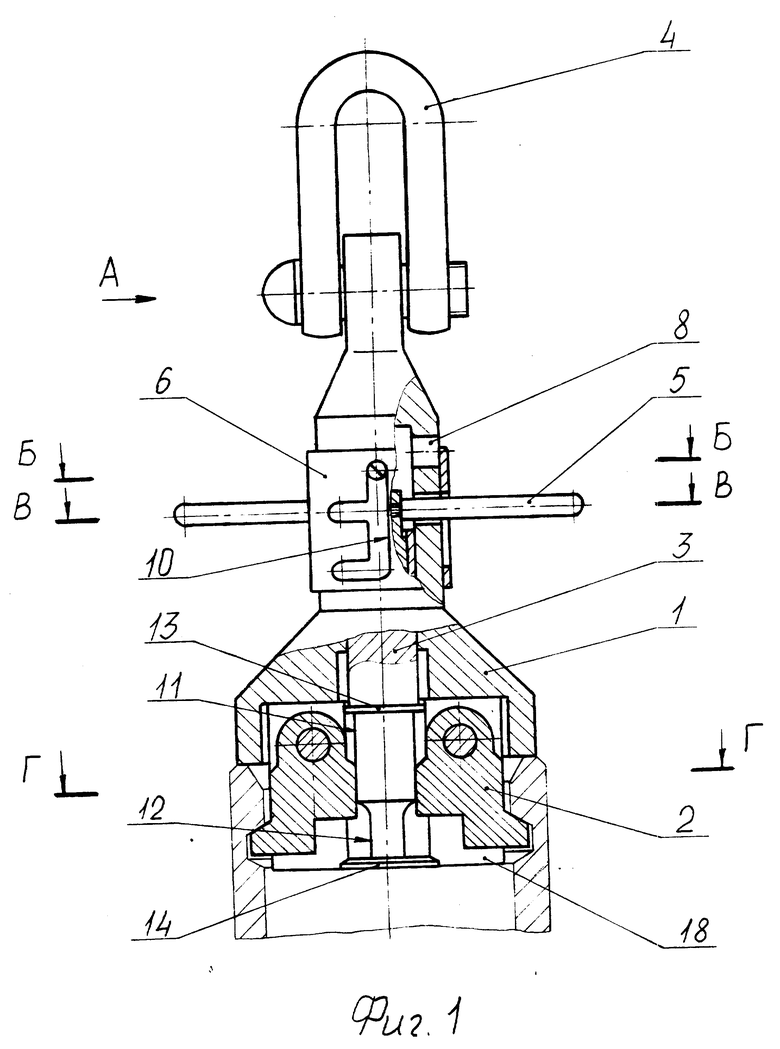
Захватное устройство для груза с отверстием, содержащее полый корпус с захватными элементами, выполненный с  образными пазами и жестко закрепленными на корпусе пальцами, размещенную в корпусе ось, подвижную в вертикальном направлении для взаимодействия своей нижней частью, выполненной снизу с кольцевым выступом, с захватными органами, несущую серьгу для навешивания на крюк грузоподъемного механизма, свободно установленную на корпусе втулку, выполненную с
образными пазами и жестко закрепленными на корпусе пальцами, размещенную в корпусе ось, подвижную в вертикальном направлении для взаимодействия своей нижней частью, выполненной снизу с кольцевым выступом, с захватными органами, несущую серьгу для навешивания на крюк грузоподъемного механизма, свободно установленную на корпусе втулку, выполненную с  образными пазами, в которых размещены пальцы корпуса, и ┘ - образными пазами, и ручки, размещенные в
образными пазами, в которых размещены пальцы корпуса, и ┘ - образными пазами, и ручки, размещенные в  образных пазах корпуса и ┘ - образных пазах втулки, отличающееся тем, что нижняя часть оси выполнена с участками поверхности прямоугольной формы и кольцевой выточкой для поочередного взаимодействия с захватными элементами, и с дополнительным кольцевым выступом, размещенным над участками поверхности прямоугольной формы с возможностью взаимодействия с корпусом, а верхняя часть оси выполнена с поперечными пазами, расположенными диаметрально противоположно друг другу, и снабжена вкладышем, установленным с возможностью поворота относительно продольной оси корпуса, и дополнительными пальцами, жестко закрепленными во вкладыше и размещенными в поперечных пазах оси, при этом ручки жестко закреплены во вкладыше, а поперечные пазы оси выполнены в направлении, совпадающем с направлением перемещения ручек в горизонтальных участках
образных пазах корпуса и ┘ - образных пазах втулки, отличающееся тем, что нижняя часть оси выполнена с участками поверхности прямоугольной формы и кольцевой выточкой для поочередного взаимодействия с захватными элементами, и с дополнительным кольцевым выступом, размещенным над участками поверхности прямоугольной формы с возможностью взаимодействия с корпусом, а верхняя часть оси выполнена с поперечными пазами, расположенными диаметрально противоположно друг другу, и снабжена вкладышем, установленным с возможностью поворота относительно продольной оси корпуса, и дополнительными пальцами, жестко закрепленными во вкладыше и размещенными в поперечных пазах оси, при этом ручки жестко закреплены во вкладыше, а поперечные пазы оси выполнены в направлении, совпадающем с направлением перемещения ручек в горизонтальных участках  образных пазов корпуса, причем корпус выполнен с прямоугольными пазами, расположенными напротив участков поверхности прямоугольной формы оси, а захватные элементы выполнены в виде двуплечих рычагов и размещены в прямоугольных пазах корпуса с возможностью ограниченного поворота.
образных пазов корпуса, причем корпус выполнен с прямоугольными пазами, расположенными напротив участков поверхности прямоугольной формы оси, а захватные элементы выполнены в виде двуплечих рычагов и размещены в прямоугольных пазах корпуса с возможностью ограниченного поворота.
| Захватное устройство для грузов с отверстиями | 1988 |
|
SU1555260A1 |
| Приспособление для соединения пучка кисти с трубкою или втулкою, служащей для прикрепления ручки | 1915 |
|
SU66A1 |

