Изобретение относится к подъемно-транспортному оборудованию и может найти применение для межоперационной транспортировки тепловыделяющих сборок ядерных энергетических реакторов, преимущественно ВВЭР.
Известен манипулятор, содержащий схват с приводом, блок фиксации и узел пространственной ориентации (а. с. СССР N 582944, кл. B 23 Q 7/04, 1976), недостатком которого являются возникновение внутренних усилий и деформация детали при захвате ее, а также необходимость базовых отверстий в детали и направляющих в схвате, что делает невозможным применение известного схвата для транспортировки тепловыделяющих сборок, так как деформация и повреждение сборки недопустимы.
Наиболее близким по технической сущности и достигаемому результату является манипулятор, содержащий схват с приводом, блок фиксации и узел пространственной ориентации, включающий блок продольного перемещения вдоль оси станков на катках с приводом манипулятора, выполненного из колонн, на которых консольно закреплена рама, блок поперечного перемещения в виде каретки с возможностью ее перемещения по раме, блок подъема и опускания (а.с. СССР N 1098791, 1984) - прототип.
Указанные манипуляторы предназначены для захвата и транспортировки деталей с малой длиной и не могут быть использованы для захвата и транспортировки тепловыделяющих сборок, так как тепловыделяющие элементы для ядерного реактора ВВЭР-1000, входящие в тепловыделяющую сборку, имеют длину около четырех метров и практически нулевую осевую жесткость, что при захвате тепловыделяющей сборки одиночным схватом приведет к провисанию концов сборки под собственным весом, деформации ее и переводу в брак.
Известно, что тепловыделяющая сборка должна иметь строго регламентированные геометрические размеры и не иметь деформирования, поскольку тепловыделяющая сборка, не отвечающая этим требованиям, зависнет в канале ядерного реактора и приведет к аварийной ситуации на атомной станции. Кроме того, известно, что циркониевая оболочка тепловыделяющего элемента отличается склонностью к разъедающей коррозии, появляющейся в результате истирания металла между соприкасающимися поверхностями даже при отсутствии коррозионной среды (Металлургия циркония. Пер.с англ. Под ред. Г.А.Меерсона и Ю.В.Гагаринского. - М., 1959, с.298).
Удары, забоины, царапины, вероятность нанесения которых на оболочку тепловыделяющего элемента существует при использовании манипулятора по прототипу, могут привести к локальной коррозии тепловыделяющего элемента в канале ядерного реактора и его разгерметизации.
Технической задачей изобретения является создание манипулятора, использование которого позволит исключить повреждение тепловыделяющих сборок.
Поставленная задача решается тем, что в манипуляторе для тепловыделяющих сборок ядерного реактора, содержащем схват с приводом, блок фиксации и узел пространственной ориентации, включающий блок продольного перемещения вдоль оси станков сборки тепловыделяющей сборки на катках с приводом манипулятора, выполненного из колонн, на которых консольно закреплена рама, блок поперечного перемещения тепловыделяющей сборки в виде каретки с возможностью ее перемещения по раме и блок подъема и опускания тепловыделяющей сборки, согласно изобретению схват выполнен по крайней мере из восьми пар захватных лап, снабжен траверсой, к которой шарнирно закреплены захватные лапы с рычагами, кинематически взаимодействующие через общий вал с приводом, блок подъема и опускания тепловыделяющей сборки выполнен из системы блоков на траверсе и каретке, связанных тросами и приводом, размещенным на каретке, а блок фиксации - из установленных на траверсе, ориентированных вертикально вверх в сторону каретки штырей с кольцевыми конусными ребрами, обращенными вершинами конусов вверх, а на каретке установлены направляющие втулки для размещения в них упомянутых штырей, причем в верхних частях направляющих втулок установлены защелки, выполненные в виде храповиков, взаимодействующих с кольцевыми конусными ребрами, а в нижней части траверсы выполнены фиксирующие штыри и втулочные направляющие на станке сборки тепловыделяющих сборок для размещения в них упомянутых фиксирующих штырей.
Другим отличием является то, что храповики выполнены в виде подпружиненных сердечников электромагнита, а на внутренней поверхности захватных лап закреплены пластины из мягкого полимерного материала, в качестве которого использован капролактам.
Выполнение схвата из восьми пар захватных лап, шарнирно закрепленных к траверсе и кинематически взаимодействующих через общий вал с приводом, позволит исключить деформацию тепловыделяющей сборки, так как равномерное по всей длине ее закрепление в захватных лапах исключит прогиб, а следовательно, и деформацию.
Выполнение блока опускания и подъема из системы блоков на траверсе и каретке, связанных тросами, позволит строго горизонтально опускать и поднимать тепловыделяющую сборку без перекосов и деформации.
Выполнение блока фиксации из установленных на траверсе, ориентированных вертикально вверх в сторону каретки штырей с кольцевыми конусными ребрами, обращенными вершинами конусов вверх, выполнение на каретке направляющих втулок для штырей с заглушками в виде храповиков - электромагнитов и соответственно выполнение в нижней части траверсы фиксирующих штырей и втулочных направляющих для них на станке сборки позволит исключить повреждение тепловыделяющих сборок за счет исключения раскачивания траверсы вместе с тепловыделяющей сборкой и ее соударение о конструкции, исключения падения траверсы вместе с тепловыделяющей сборкой при обрыве троса или несрабатывании тормозного устройства на блоке подъема и опускания и строгой ориентации траверсы относительно станка сборки тепловыделяющих сборок.
Дополнительная защита в виде штырей и направляющих втулок позволяет останавливать опускание траверсы с тепловыделяющей сборкой в случаях аварийных ситуаций, указанных выше.
Кроме того, закрепление на внутренних поверхностях захватных лап капролактамных пластин исключит нанесение царапин и вмятин на тепловыделяющую сборку.
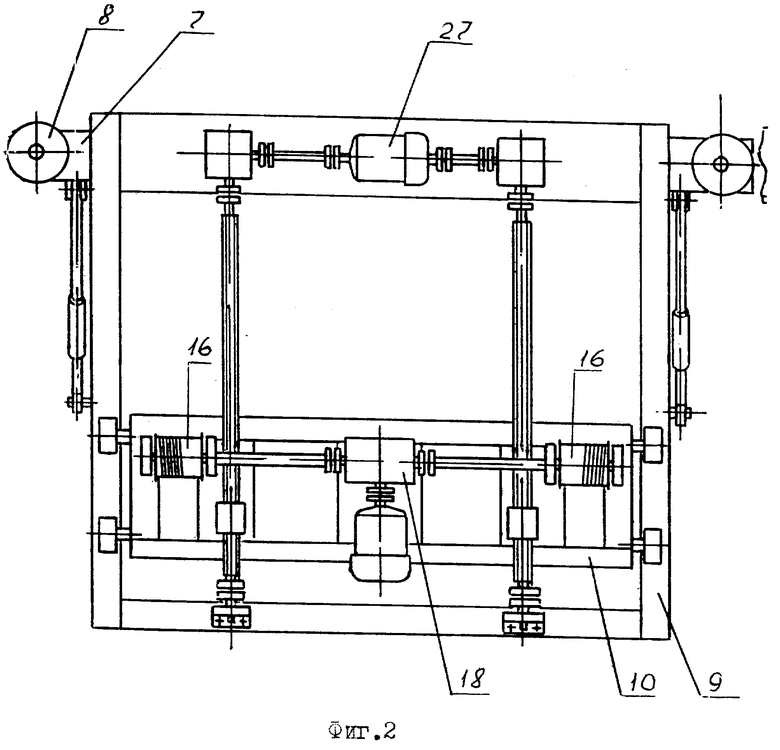
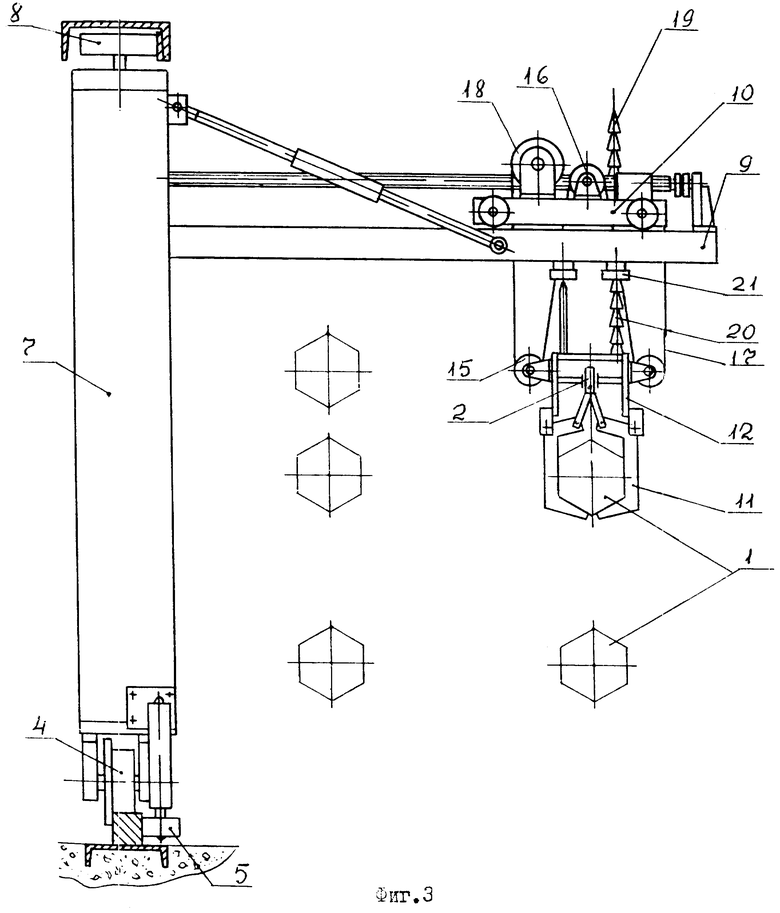
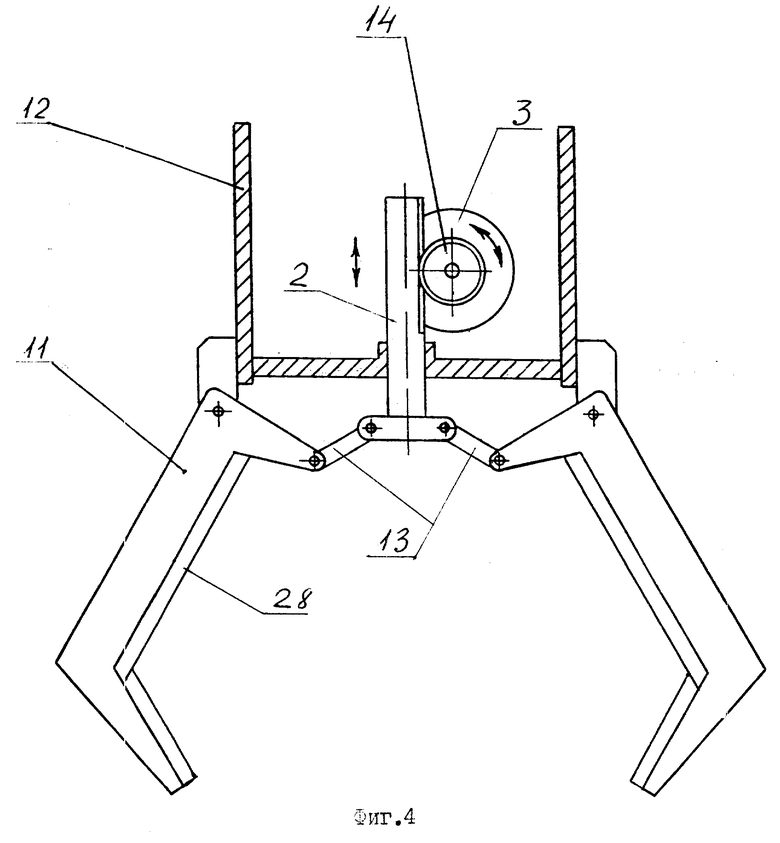
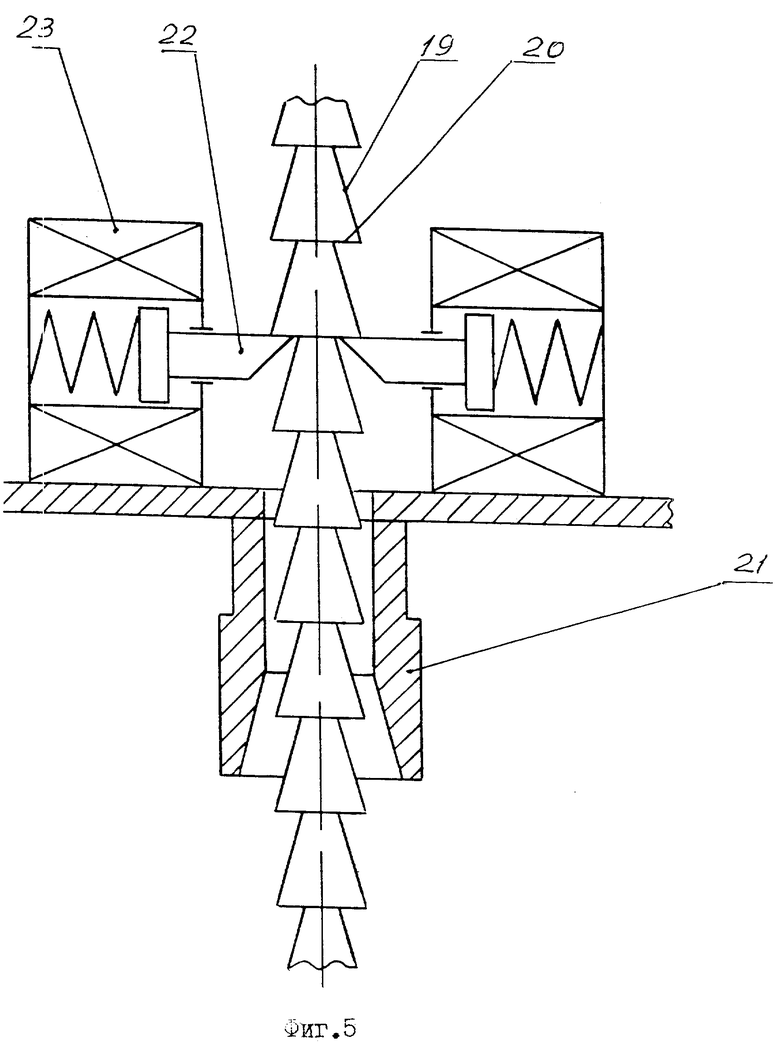
На чертежах (фиг.1 - 5) представлен манипулятор для тепловыделяющих сборок ядерного реактора: фиг.1 - общий вид; фиг.2 - вид сверху; фиг.3 - вид сбоку; фиг.4 - схват; фиг.5 - блокировка штыря.
Манипулятор для тепловыделяющих сборок 1 ядерного энергетического реактора ВВЭР-1000 содержит схват 2 с приводом 3, узел пространственной ориентации, включающий блок продольного перемещения вдоль оси станков сборки тепловыделяющих сборок 1 на катках 4 с направляющими роликами 5, с приводом 6 манипулятора, выполненного из колонн 7 с опорными роликами 8 вверху, на которых консольно закреплена рама 9, блок поперечного перемещения тепловыделяющей сборки 1 в виде каретки 10 с возможностью ее перемещения по раме 9 и блок подъема и опускания тепловыделяющей сборки.
Схват 2 выполнен по крайней мере из восьми пар захватных лап 11, снабжен траверсой 12, к которой шарнирно закреплены захватные лапы 11 с рычагами 13, кинематически воздействующие через общий вал 14 с приводом 3. Блок подъема и опускания сборки 1 выполнен из системы блоков 15 на траверсе 12 и блоков 16 на каретке 10, связанных тросами 17 и с приводом 18, размещенным на каретке 10. Блок фиксации выполнен из установленных на траверсе 12 ориентированных вертикально вверх в сторону каретки 10 штырей 19 с кольцевыми конусными ребрами 20, обращенными вершинами конусов вверх, а на каретке 10 установлены направляющие втулки 21 для размещения в них упомянутых штырей 19, причем в верхних частях направляющих втулок 21 установлены защелки 22, выполненные в виде храповиков, взаимодействующих с кольцевыми конусными ребрами 20.
Храповики являются подпружиненными сердечниками электромагнита 23. В нижней части траверсы 12 выполнены фиксирующие штыри 24 и втулочные направляющие 25 на станке 26 сборки тепловыделяющих сборок 1 (показан пунктиром).
Каретка 10 снабжена приводом 27 перемещения по раме 9. Захватные лапы 11 с внутренней стороны снабжены пластинами 28 из капролактама.
Манипулятор для тепловыделяющих сборок ядерного реактора работает следующим образом.
В соответствии с программой рабочего цикла, выдаваемой системой управления манипулятором (не показана) схват 2 с помощью узла пространственной ориентации, его блока продольного перемещения на катках 4 с направляющими роликами 5 посредством привода 6 перемещает вдоль оси станков 26 сборки тепловыделяющих сборок 1 колонны 7 с опорными роликами 8 с консольно закрепленной на колоннах рамой 9 на заданную позицию. Каретка 10 блока поперечного перемещения с помощью привода 27 занимает позицию над станком 26 сборки тепловыделяющей сборки 1. Траверса 12 блока подъема и опускания сборки 1 на тросах 17, размещенных в системе блоков 15 на траверсе 12 и блоков 16 на каретке 10, с помощью привода 18 опускается так, что фиксирующие штыри 24 входят во втулочные направляющие 25 и центруют траверсу 12 относительно сборки 1, размещенной на станке 26 сборки тепловыделяющих сборок 1. Захватные лапы 11 с помощью привода 3, схвата 2 и рычагов 13, взаимодействующих с общим валом 14, охватывают сборку 1 точно по периметру и равномерно по длине.
Контакт захватных лап 11 с тепловыделяющей сборкой 1 через пластины 28 из капролактама предохранит поверхность сборки 1 от повреждения захватными лапами 11. При опускании вместе с траверсой 12 перемещаются в направляющих втулках 21 штыри 19 блока фиксации, предупреждая тем самым раскачивание траверсы 12 на тросах 17.
Подъем тепловыделяющей сборки 1 осуществляется следующим образом.
Тепловыделяющая сборка 1 с помощью привода 3 фиксируется в захватных лапах 11 схвата 2, и с помощью привода 18 осуществляется ее подъем. При этом штыри 19, перемещаясь в направляющих втулках 21, предотвращают колебания траверсы 12 и вместе с ней - сборки 1, а кольцевые конусные ребра 20, взаимодействуя с защелками-храповиками 22, выполненными как подпружиненные сердечники электромагнита 23, блокируют траверсу 12 вместе со сборкой 1 от падения в случае обрыва троса. Таким образом, двойная блокировка траверсы исключает любые случайные и непредвиденные падения траверсы вместе с тепловыделяющей сборкой.
Манипулятор прошел испытания с положительными результатами.
| название | год | авторы | номер документа |
|---|---|---|---|
| ЛИНИЯ ПОДГОТОВКИ ТЕПЛОВЫДЕЛЯЮЩИХ ЭЛЕМЕНТОВ К СБОРКЕ В ТЕПЛОВЫДЕЛЯЮЩИЕ СБОРКИ | 1996 |
|
RU2127002C1 |
| ТЕПЛОВЫДЕЛЯЮЩАЯ СБОРКА ЯДЕРНОГО РЕАКТОРА | 1995 |
|
RU2079170C1 |
| ТЕПЛОВЫДЕЛЯЮЩАЯ СБОРКА ЯДЕРНОГО РЕАКТОРА | 1997 |
|
RU2120670C1 |
| АВТОМАТИЧЕСКАЯ ЛИНИЯ СБОРКИ ТЕПЛОВЫДЕЛЯЮЩИХ ЭЛЕМЕНТОВ В ТЕПЛОВЫДЕЛЯЮЩИЕ СБОРКИ | 1997 |
|
RU2126739C1 |
| СПОСОБ ТРАНСПОРТИРОВКИ ТЕПЛОВЫДЕЛЯЮЩЕЙ СБОРКИ ЯДЕРНОГО РЕАКТОРА | 2008 |
|
RU2381578C2 |
| ДИСТАНЦИОНИРУЮЩАЯ РЕШЕТКА ТЕПЛОВЫДЕЛЯЮЩЕЙ СБОРКИ ЯДЕРНОГО РЕАКТОРА | 1997 |
|
RU2127001C1 |
| АВТОМАТИЗИРОВАННЫЙ МОДУЛЬ РАЗМЕТКИ ГРАНИЦ АКТИВНОГО СЛОЯ В ТВЭЛАХ | 1995 |
|
RU2109354C1 |
| СТАНОК ДЛЯ СБОРКИ ТЕПЛОВЫДЕЛЯЮЩИХ ЭЛЕМЕНТОВ В ТЕПЛОВЫДЕЛЯЮЩИЕ СБОРКИ | 1992 |
|
RU2065350C1 |
| СТАНОК ДЛЯ СБОРКИ ТЕПЛОВЫДЕЛЯЮЩИХ ЭЛЕМЕНТОВ В ТЕПЛОВЫДЕЛЯЮЩИЕ СБОРКИ | 1995 |
|
RU2099167C1 |
| УСТРОЙСТВО ДЛЯ МОНТАЖА-ДЕМОНТАЖА ГОЛОВКИ ТЕПЛОВЫДЕЛЯЮЩЕЙ СБОРКИ ЯДЕРНОГО РЕАКТОРА | 1997 |
|
RU2145448C1 |
Изобретение относится к подъемно-транспортному оборудованию и может быть использовано для межоперационной транспортировки тепловыделяющих сборок (ТВС) ядерного реактора, для исключения повреждений тепловыделяющей сборки. В манипуляторе схват выполнен по крайней мере из восьми пар захватных лап, снабжен траверсой, к которой шарнирно закреплены захватные лапы с рычагами, кинематически взаимодействующие через общий вал с приводом, блок подъема и опускания ТВС выполнен из системы блоков на траверсе и каретке, связанных тросами и приводом, размещенным на каретке, а блок фиксации - из установленных на траверсе, ориентированных вертикально вверх в сторону каретки штырей с кольцевыми конусными ребрами, обращенными вершинами конусов вверх, а на каретке установлены направляющие втулки для размещения в них упомянутых штырей, причем в верхних частях направляющих втулок установлены защелки, выполненные в виде храповиков, взаимодействующих с кольцевыми конусными ребрами, а в нижней части траверсы выполнены фиксирующие штыри и втулочные направляющие на станке сборке ТВС для размещения в них упомянутых штырей, храповики выполнены в виде подпружиненных сердечников электромагнита, а на внутренней поверхности захватных лап выполнены пластины из мягкого полимерного материала - капролактама. Технический результат заключается в создании манипулятора, и использование которого позволит исключить повреждение тепловыделяющих сборок. 2 з.п.ф-лы, 5 ил.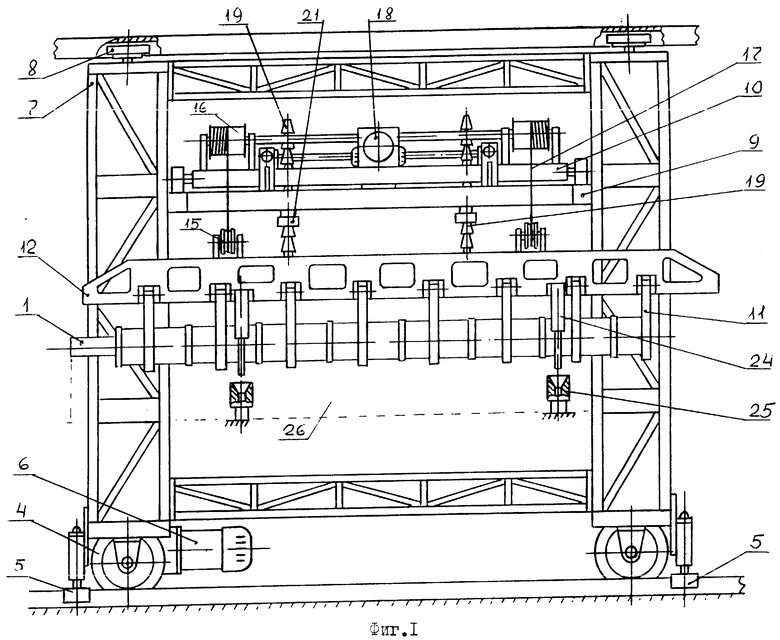
| SU, 1098791, кл | |||
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |

