Изобретение относится к гироскопическому приборостроению и может быть использовано преимущественно для обеспечения навигации морских, воздушных и наземных объектов, при гравиметрических и геодезических работах.
Известен способ выработки навигационных параметров и вертикали места [1] В этом способе выработка навигационных параметров алгоритмически совмещена с выработкой управляющих сигналов гироскопов.
Наиболее близким является способ выработки навигационных параметров и вертикали места [2] заключающийся в измерении и формировании сигнала, пропорционального проекции, соответствующей составляющей кажущегося ускорения, измеренного при помощи каждого акселерометра, установленного по данной оси приборного трехгранника, связанного с гироплатформой, формировании сигналов управления гироплатформой, отработке сформированного сигнала при помощи гироскопа, удержании гироплатформы в плоскости горизонта, чем обеспечивается выработка вертикали места и определении навигационных параметров на основе сигналов о составляющих абсолютной угловой скорости приборного трехгранника путем интегрирования кинематических уравнений.
Особенность этого способа заключается в том, что точность выработки навигационных параметров и вертикали места целиком зависит от точности входящих в гироплатформу чувствительных элементов и погрешностей, которые приводятся к погрешностям этих элементов.
Предлагаемый способ позволяет схемными средствами уменьшить влияние погрешностей чувствительных элементов и погрешностей, которые приводятся к погрешностям этих элементов, на точность выработки навигационных параметров и вертикали места.
Указанный технический результат достигается тем, что к сигналам проекций абсолютной угловой скорости приборного трехгранника, по которым вырабатываются навигационные параметры, добавляют дополнительные сигналы, величины которых и закон их поведения устанавливаются изначально, заблаговременно или с помощью устройства, основной функцией которого является выработка навигационных параметров и вертикали места на основе сигналов одноименных параметров различных контуров интегрирования кинематических уравнений с учетом дополнительных сигналов, у которых добавляемые дополнительные сигналы имеют различное значение.
Существо этого способа заключается в следующем.
Навигационные параметры в полуаналитических инерциальных системах, как правило, определяются интегрированием кинематических уравнений [1] по информации о трех составляющих абсолютной угловой скорости приборного трехгранника, исходной информацией для которых служат сигналы управления гироскопами. В действительности составляющие абсолютной угловой скорости приборного трехгранника мы знаем с какой-то точностью, зависящей от погрешности системы. Очевидно, что если интегрирование кинематических уравнений осуществлялось по суммарному сигналу, один из которых является измеренным значением составляющей абсолютной угловой скорости, а другой - наперед заданным значением дополнительного сигнала, эквивалентного известному значению искусственно создаваемого дрейфа, то в этом случае выходные параметры будут менять свое значение. Сравнивая эти значения с одноименными значениями выходных параметров, вырабатываемых другими контурами интегрирования кинематических уравнений, у которых добавляемые дополнительные сигналы имеют различные значения, находим замеры, на основе которых устройство выработки навигационных параметров определяет оценки погрешности выходных навигационных параметров и вертикали места.
Проиллюстрировать данный способ можно на примере различных ИНС, в частности, на примере полуаналитических инерциальных систем, например, на ИНС [2] на гироскопической навигационной системе [3]
На чертеже представлена функциональная блок-схема, пригодная как для случая [2] так и для случая [3]
На функциональной блок-схеме обозначены:
1 стабилизированная в плоскости горизонта гироплатформа;
2I, 2II контуры интегрирования кинематических уравнений;
3 устройство выработки навигационных параметров;
ΩxΩyΩz проекции абсолютной угловой скорости приборного трехгранника;
ΔΩ
ΔΩ
Φ
Φ
Φвых λвых Kвых- выходные навигационные параметры;
Δ1 и Δ2 оценка погрешностей выработки вертикали мест.
Сигналы проекций абсолютной угловой скорости, вырабатываемые гироплатформой ΩxΩyΩz суммируются с дополнительными сигналами ΔΩ
Как известно, для приборного трехгранника, совершающего вращение вокруг вертикальной оси вместе с объектом, кинематические уравнения могут быть реализованы следующим образом:
где Kпр курс объекта;
Φпр широта места;
VE скорость объекта по параллели;
R радиус Земли;
ω скорость Земли;
WE восточная составляющая абсолютной угловой скорости;
ΩN северная составляющая абсолютной угловой скорости.
Интегрирование кинематических уравнений в контуре 2I может, к примеру, осуществляться следующим образом:
в контуре 2II следующим образом:
Устройство 3 по значениям составляющих абсолютной угловой скорости приборного трехгранника ΩxΩyΩz и по сигналам различных контуров интегрирования кинематических уравнений вырабатывают выходные параметры с учетом оценки их погрешностей и оценки погрешностей вертикали места.
Преимущество предлагаемого способа выработки навигационных параметров и вертикали места заключается в том, что схемными средствами удается уменьшить влияние инструментальных погрешностей системы на точность выработки выходных навигационных параметров вертикали места.
Использование: в гироскопическом приборостроении, в навигации морских, воздушных и наземных объектов, при гравиметрических и геодезических работах. Сущность изобретения: способ выработки навигационных параметров и вертикали места, заключается в формировании сигналов, пропорциональных соответствующим проекциям вектора кажущегося ускорения, измеренных при помощи акселерометров, установленных по каждой оси приборного трехгранника, связанного с гироплатформой, формировании сигналов управления гироплатформой, удерживании гироплатформы в плоскости горизонта и выработке вертикали места и навигационных параметров на основе сигналов управления, пропорциональных соответствующим проекциям вектора угловой скорости приборного трехгранника и с учетом оценки их погрешностей при помощи устройства выработки навигационных параметров, путем сравнения значений одноименных выходных параметров различных контуров интегрирования кинематических уравнений приборного трехгранника, выработанных на основе сигналов, пропорциональных сумме соответствующих проекций вектора угловой скорости приборного трехгранника и соответствующих дополнительных сигналов, величины и закон изменения которых предварительно задаются или устанавливаются с помощью устройства выработки навигационных параметров, благодаря чему схемными средствами обеспечивается уменьшение влияния погрешностей инерциальной системы на выходные навигационные параметры и вертикаль места. 1 ил.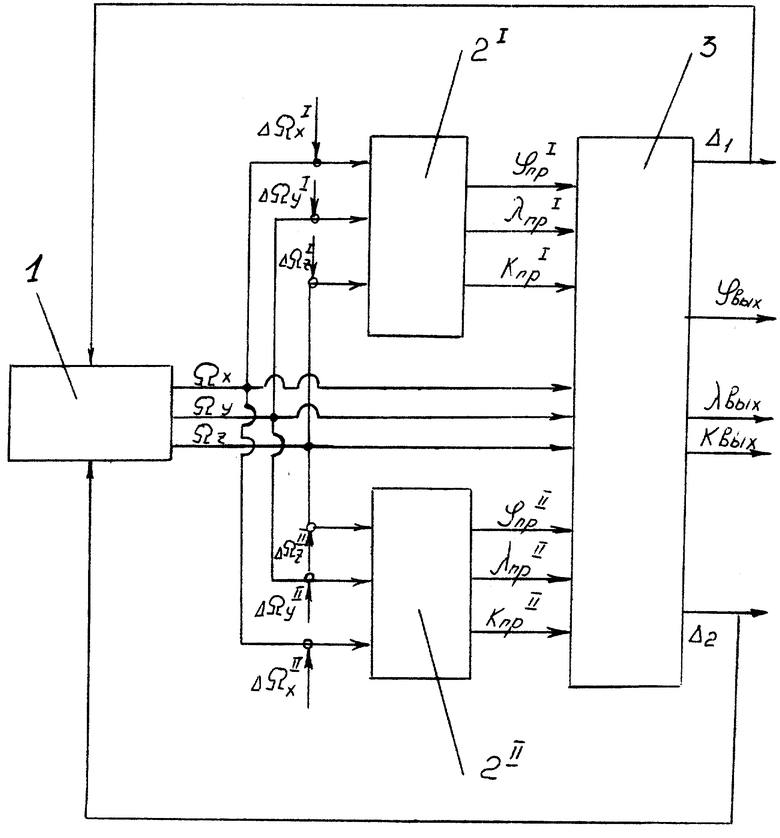
Способ выработки навигационных параметров и вертикали места, заключающийся в формировании сигналов, пропорциональных соответствующим проекциям вектора кажущегося ускорения, измеренных при помощи акселерометров, установленных по каждой оси приборного трехгранника, связанного с гироплатформой, формировании сигналов управления гироплатформой, удержании гироплатформы в плоскости горизонта и выработке вертикали места и навигационных параметров на основе сигналов управления, пропорциональных соответствующим проекциям вектора угловой скорости приборного трехгранника, отличающийся тем, что выходные навигационные параметры и вертикаль места вырабатывают с учетом оценки их погрешностей при помощи устройства выработки навигационных параметров путем сравнения значений одноименных выходных параметров различных контуров интегрирования кинематических уравнений приборного трехгранника, вырабатываемых на основе сигналов, пропорциональных сумме соответствующих проекций вектора угловой скорости приборного трехгранника и соответствующих дополнительных сигналов, величины и закон изменения которых предварительно задаются или устанавливаются с помощью устройства выработки навигационных параметров.
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Кошляков В.Н | |||
| Задачи динамики твердого тела и прикладной теории гироскопов | |||
| - М.: Наука, 1985, с.236 - 248 | |||
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Ишлинский А | |||
| Ю | |||
| Механика гироскопических систем, | |||
