Изобретение относится к гироскопическому приборостроению и может быть использовано для обеспечения навигации морских, воздушных и наземных движущихся объектов и для непосредственной или косвенной стабилизации различных средств в плоскости горизонта, например гравиметрических чувствительных элементов.
Известен способ выработки навигационных параметров и вертикали места [1] . Этот способ включает измерение составляющих кажущегося ускорения при помощи акселерометров формирования сигналов управления гироплатформой с использованием сигнала датчика абсолютной угловой скорости, отработку сформированных сигналов при помощи гироскопа, определение навигационных параметров на основе информации о составляющих абсолютной угловой скорости приборного трехгранника и определение вертикали места.
Недостатком этого способа является ограниченная возможность конструктивов исполнения.
Целью изобретения является расширение конструктивных возможностей.
Цель достигается тем, что сигнал о вертикальной составляющей абсолютной угловой скорости приборного трехгранника, связанного с гироплатформой, вырабатывают по сигналу датчика абсолютной угловой скорости с использованием сигналов управления гироскопом и сигналов о направляющих косинусах между осями приборного трехгранника и осью чувствительности датчика угловой скорости.
В этом случае датчик абсолютной угловой скорости (ДУС) может быть установлен вне гироплатформы или вне центрального прибора.
Проиллюстрируем предлагаемый способ на следующем примере. На чертеже представлена функциональная схема гироскопической навигационной системы - гирогоризонткомпаса, где приняты следующие обозначения:
1 - гиростабилизированная платформа в двухосном карданном подвесе,
2 - блок управления гироплатформой и выработки навигационных параметров,
3 - датчик абсолютной угловой скорости,
4 - блок управления двигателями стабилизации,
5 - трехстепенной гироскоп,
6, 7 - датчики момента гироскопа,
8, 9 - датчики углов гироскопа,
10, 11 - акселерометры,
12, 13 - двигатели стабилизации,
14 - датчик килевой качки,
15 - датчик бортовой качки.
Гирогоризонткомпас содержит гиростабилизированную платформу 1, блок управления гироплатформой и выработки навигационных параметров 2, на гироплатформе 1 расположен трехстепенной гироскоп 5 с датчиками момента 6, 7 и датчиками углов 8, 9, два акселерометра 10, 11, оси чувствительности которых ортогональны между собой и параллельны плоскости гироплатформы, выходы акселерометров 10, 11, выход датчика абсолютной угловой скорости 3 и выходы датчиков углов качек 14, 15 соединены с блоком управления гироплатформой и выработки выходных параметров 2, выходы которого соединены с датчиками момента гироскопа 6, 7, входы блока управления двигателями стабилизации 4 соединены с выходами датчиков углов гироскопа 8, 9, выходы блока управления двигателями стабилизации 4 соединены с соответствующими двигателями стабилизации 12, 13.
Гирогоризонткомпас функционирует следующим образом: ось кинетического момента H в исходном положении ортогональна плоскости чертежа, так что оси подвеса гироскопа и ось H, когда нет наклона объекта относительно плоскости горизонта, составляет ортогональный трехгранник.
Гироплатформа 1 с помощью двигателей стабилизации 12, 13 по сигналам рассогласования датчиков углов гироскопа 8, 9 все время удерживается в одной плоскости с кожухом гироскопа 5. Кожух гироскоп 5 вместе с гиростабилизированной платформой 1 приводится в горизонт и удерживается в горизонте с помощью моментов, накладываемых через датчики моментов 6, 7 гироскопа 5 токами управления по сигналам, вырабатываемым в блоке управления гироплатформой 2. Эти токи управления соответствуют горизонтальным составляющим абсолютной угловой скорости корабельного трехгранника Дарбу, повернутого на угол K - курс объекта относительно географического трехгранника Дарбу. В свою очередь сигналы, по которым вырабатываются токи управления гироскопа 5 и навигационные параметры, формируются в блоке управления гироплатформой и выработки навигационных параметров 2 в результате обработки величин горизонтальных составляющих кажущихся ускорений вершины трехгранника Дарбу, измеренными акселерометрами 10, 11, используя величину вертикальной составляющей абсолютной угловой скорости моделируемого трехгранника.
Для особых условий эксплуатации и грубых систем в качестве сигнала вертикальной составляющей абсолютной угловой скорости приборного трехгранника, связанного с гироплатформой может быть использован непосредственно сигнал ДУСа, ось чувствительности которого перпендикулярна плоскости палубы, два или три акселерометра могут быть установлены на палубе вместо установленных на гироплатформе.
Алгоритм выработки управляющих сигналов гироплатформы будет


где ax, ay - показания акселерометров;
Ωx; Ωy; Ωz - проекции абсолютной угловой скорости приборного трехгранника; показания датчика абсолютной угловой скорости (ДУС);
показания датчика абсолютной угловой скорости (ДУС); направляющие косинусы между осью чувствительности ДУС и осями приборного трехгранника,
направляющие косинусы между осью чувствительности ДУС и осями приборного трехгранника,
θ - угол бортовой качки;
ψ - угол килевой качки.
Широта места ϕ и долгота места Ω и курс объекта K определяются по значениям составляющих абсолютной угловой скорости приборного трехгранника ΩxΩyΩz в результате решений кинематических уравнений, и(или) по значений ΩxΩy с использованием информации от внешнего источника, например, от лага.
Для повышения точности выработки выходных параметров с целью оценки инструментальных и динамических погрешностей может быть использован метод модуляции погрешностей, заключающийся в обеспечении принудительных колебаний гироплатформы вокруг осей, лежащих в плоскости гироплатформы, с помощью блока колебаний и(или) поворотов чувствительных элементов вокруг оси, перпендикулярной гироплатформе с помощью блока поворота. В качестве опоры для оценки погрешностей может быть использована внешняя информация или информация от дополнительной инерциальной системы.
Источник информации
(1) В.А. Беленький, патент РФ N 2000544.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ВЫРАБОТКИ НАВИГАЦИОННЫХ ПАРАМЕТРОВ И ВЕРТИКАЛИ МЕСТА | 1995 |
|
RU2098763C1 |
| ГИРОГОРИЗОНТКОМПАС | 1993 |
|
RU2051330C1 |
| СТАБИЛИЗИРОВАННАЯ В ПЛОСКОСТИ ГОРИЗОНТА ГИРОПЛАТФОРМА | 1993 |
|
RU2047093C1 |
| СПОСОБ ВЫРАБОТКИ НАВИГАЦИОННЫХ ПАРАМЕТРОВ И ВЕРТИКАЛИ МЕСТА | 2003 |
|
RU2251078C1 |
| СПОСОБ ВЫРАБОТКИ НАВИГАЦИОННЫХ ПАРАМЕТРОВ И ВЕРТИКАЛИ МЕСТА | 2003 |
|
RU2247944C2 |
| СПОСОБ ВЫРАБОТКИ НАВИГАЦИОННЫХ ПАРАМЕТРОВ И ВЕРТИКАЛИ МЕСТА | 1995 |
|
RU2110769C1 |
| ГИРОСКОПИЧЕСКАЯ НАВИГАЦИОННАЯ СИСТЕМА ДЛЯ ПОДВИЖНЫХ ОБЪЕКТОВ (ВАРИАНТЫ) | 1996 |
|
RU2114395C1 |
| СПОСОБ ВЫРАБОТКИ НАВИГАЦИОННЫХ ПАРАМЕТРОВ | 2001 |
|
RU2197716C2 |
| СПОСОБ ВЫРАБОТКИ НАВИГАЦИОННЫХ ПАРАМЕТРОВ И ВЕРТИКАЛИ МЕСТА | 1997 |
|
RU2126136C1 |
| СПОСОБ ВЫРАБОТКИ НАВИГАЦИОННЫХ ПАРАМЕТРОВ И ВЕРТИКАЛИ МЕСТА | 1998 |
|
RU2138018C1 |
Способ предназначен для навигации морских, воздушных и наземных объектов и для непосредственной или косвенной стабилизации изделий в плоскости горизонта. Составляющие абсолютной угловой скорости приборного трехгранника определяют, используя сигнал датчика абсолютной угловой скорости, находящегося вне гироплатформы, что существенно расширяет возможности выбора конструктивов системы. Способ включает измерение составляющих кажущегося ускорения, формирование сигналов управления гироплатформой, обработку сформированных сигналов, определение навигационных параметров и вертикали места. Сигнал о вертикальной составляющей абсолютной угловой скорости приборного трехгранника вырабатывают по сигналу датчика абсолютной угловой скорости с использованием сигналов управления гироскопом и информации о направляющих косинусах между осями трехгранника и осью чувствительности датчика. 1 ил.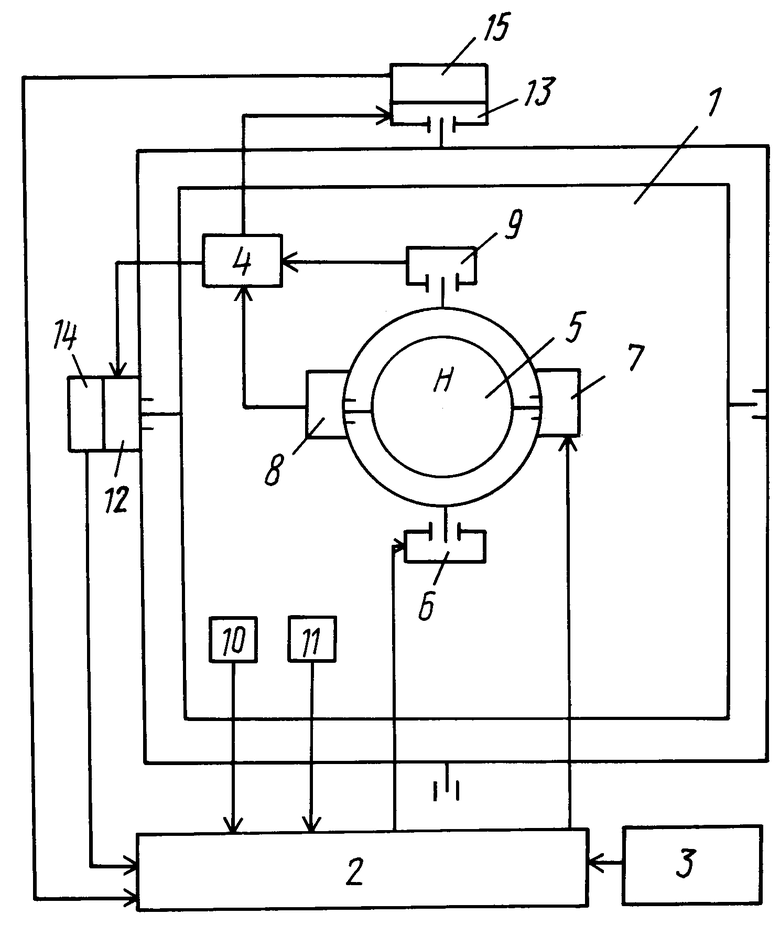
Способ выработки навигационных параметров и вертикали места, включающий измерение составляющих кажущегося ускорения при помощи акселерометров, формирование сигналов управления гироплатформой с использованием датчика абсолютной угловой скорости, отработку сформированных сигналов при помощи гироскопа, определение навигационных параметров на основе информации о составляющих абсолютной угловой скорости приборного трехгранника, связанного с гироплатформой, и определение вертикали места, отличающийся тем, что сигнал о вертикальной составляющей абсолютной угловой скорости приборного трехгранника, связанного с гироплатформой, вырабатывают по сигналу датчика абсолютной угловой скорости с использованием сигналов управления гироскопом и информации о направляющих косинусах между осями приборного трехгранника, связанного с гироплатформой, и осью чувствительности датчика абсолютной угловой скорости.
| RU 2000544C, 07.09.93 | |||
| СПОСОБ ОПРЕДЕЛЕНИЯ НАВИГАЦИОННЫХ ПАРАМЕТРОВ И ВЕРТИКАЛИ МЕСТА | 1991 |
|
RU2046289C1 |
| ГИРОГОРИЗОНТКОМПАС | 1993 |
|
RU2051330C1 |
| US 5359889, 01.11.94 | |||
| ПОДВЕСНОЙ СВОД МАРТЕНОВСКОЙ ПЕЧИ | 0 |
|
SU368457A1 |

