Изобретение относится к способу и устройству формирования нечеткого управляющего воздействия, при этом управляющие правила могут изменяться в течение исполнения (операции) нечеткой оценки. Изобретение также относится к системе, имеющей большое количество управляющих устройств для управления одним управляемым объектом, главным образом, к системе управления, в которой может быть выполнена замена среди большого количества управляющих устройств посредством нечеткой оценки и к способу управления этой системой.
Устройство для формирования нечеткого управляющего воздействия обеспечено вводом контролируемой переменной от управляемого объекта, выполняет так называемую нечеткую оценку и выдает регулируемую переменную, подаваемую к управляемому объекту. Нечеткая оценка (разъяснение неопределенности) часто выражается управляющими правилами (правила "если ..., то ...") в формате "если ..., то ...".
Имеются устройства нечеткого управления, в которых управляющие правила могут быть заменены вручную или дистанционно в течение выполнения (операции) нечеткой оценки. В устройстве такого типа имеется возможность того, что выход нечеткого управления будет резко изменяться в соответствии с содержанием измененного правила. Когда выход управления подвергается резкому изменению, имеется опасность того, что управляемый объект будет подвергаться неблагоприятному воздействию.
Для того, чтобы надлежащим образом действовать с управляемым объектом, имеющим характеристику, которая изменяется в зависимости от состояния, и чтобы повысить точность управления, предложена система, которая управляет одним управляемым объектом путем использования большого количества управляющих устройств. В системе управления этого типа, управляющему устройству которой среди их большого количества должна быть задана загрузка на управление, выбор решения в отношении управляемого объекта осуществляется автоматически, используя арифметическое выражение, а замена выполняется вручную обслуживающим персоналом.
Однако, согласно арифметическому решению, касающемуся управляющего устройства, которое должно быть загружено, и замены, основанной на этом решении, затруднительно точно выразить арифметически время, при котором происходит замена управляющего устройства, и оценить это время. Кроме того, трудно выполнить высокоточную замену.
Далее, при ручной замене, выполняемой обслуживающим персоналом, возникает проблема, которая заключается в том, что воспроизводимость времени замены мала и в результатах контроля выявляются расхождения. Например, в том случае, когда контролируется работа по перемещению объекта, проблема, с которой приходится сталкиваться, заключается в том, что плавное управление работой не может быть осуществлено, кроме того в том случае, когда контролируется процесс изготовления изделия, проявляется несоответствие качества изготовленных изделий.
Цель настоящего изобретения заключается в создании способа и устройства формирования нечеткого управляющего воздействия, при котором выход нечеткого управления может плавно изменяться даже в этом случае, когда в течение работы заменяется правило.
Другая цель настоящего изобретения заключается в создании способа и устройства формирования нечеткого управляющего воздействия, при котором правило может заменяться только при определенном условии, так что выход управления не может быть резко изменен.
Еще одна цель настоящего изобретения заключается в создании системы управления и способа управления, при которых замена среди большого количества управляющих устройств для управления одним управляющим объектом может выполняться в течение всего времени.
Устройство для формирования нечеткого управляющего воздействия, в котором правило может быть изменено, в соответствии с настоящим изобретением, отличается наличием блока нечеткой логики (средства разъяснения неопределенности, при котором правило может изменяться в течение работы), блока запоминания для запоминания выхода нечеткой оценки, который преобладает непосредственно перед заменой правила, и блока формирования соотношения сигналов, синтезирующего выходной сигнал таким образом, что при прохождении времени от момента, при котором выполняется замена правила, имеет место постепенное снижение процентного содержания выхода блока нечеткой логики, который преобладает непосредственно до замены правила, и постепенное увеличение процентного содержания выхода блока нечеткой логики, который преобладает после замены правила.
Способ формирования нечеткого управляющего воздействия согласно настоящему изобретению отличается запоминанием выходного сигнала блока нечеткой логики, который преобладает непосредственно до замены правила, когда выполняется замена правила, генерацией выходного нечеткого управляющего воздействия посредством комбинирования после замены правила запоминаемого выхода блока нечеткой логики, который преобладает непосредственно перед изменением правила, и выхода блока нечеткой логики, который преобладает после замены правила, при этом комбинационное отношение изменяется таким образом, что при прохождении времени с момента, при котором выполняется изменение правила, происходит постепенное уменьшение процентного содержания выхода блока нечеткой логики, который преобладает непосредственно перед заменой правила, и постепенное повышение процентного содержания выхода блока нечеткой логики, который преобладает после замены правила, и выведением в качестве нечеткого управляющего воздействия при прохождении заданного времени от момента, при котором выполняется замена правила, выхода блока нечеткой логики, который преобладает после замены правила.
Согласно настоящему изобретению, когда правило в устройстве формирования нечеткого воздействия заменяется, выход блока нечеткой логики, преобладающий непосредственно перед заменой правила, и выход блока нечеткой логики, преобладающий после замены правила, объединяются. В результате объединения процентное содержание выхода, преобладающего после замены правила, постепенно увеличивается, в то время как процентное содержание выхода, преобладающего непосредственно перед заменой правила, постепенно уменьшается. В результате управляющее воздействие плавно изменяется от величины, непосредственно предшествующей замене правила, до величины, имеющей место после изменения правила, и поэтому обеспечивается возможность избежать внезапное изменение. Соответственно, управляемый объект не подвергается вредному воздействию.
Кроме того, поскольку выход блока нечеткой логики подвергается обработке, вышеуказанное может выполняться независимо от количества правил и количества входов. Соответственно, нет необходимости в том, чтобы модифицировать конструкцию блока нечеткой логики, и поэтому устройство формирования нечеткого управляющего воздействия не становится более сложным по конструкции.
Предлагаемый вариант устройства формирования нечеткого управляющего воздействия, в котором правило может изменено в соответствии с настоящем изобретением, отличается наличием блока нечеткой логики (средством разъяснения неопределенности), в котором правило может быть изменено в течение работы, блока фиксации кода правила преобразования для фиксации кода, который характеризует изменяемое новое правило, схему сравнения с заданным уровнем для определения того, попадает ли степень соответствия входного сигнала по отношению к функции предыдущего члена в средстве разъяснения неопределенности в допустимые пределы для замены правила, и блока коммутации (средства управления для подачи кода нового правила, фиксируемого в блоке фиксации правила, к средству разъяснения неопределенности, когда определено, что соответствие входного сигнала попадает в допустимые пределы, и для запрещения подачи кода нового правила к средству разъяснения неопределенности, когда определено, что соответствие входного сигнала попадает вне допустимых пределов).
Вариант способа формирования нечеткого управляющего воздействия, которое включает в себя блок нечеткой логики (средство разъяснения неопределенности, в котором правило может быть заменено в течение работы), согласно настоящему изобретению, отличается фиксацией кода, который характеризует новое правило для замены, когда применен код, при этом когда применяется команда на изменение правила, определяется путем сравнения, попадает ли степень соответствия входного сигнала по отношению к функции предыдущего члена в средстве разъяснения неопределенности в допустимые пределы для замены правила, прилагая фиксированный код нового правила к средству разъяснения неопределенности, когда определено, что соответствие входного сигнала попадает в допустимые пределы, и запрещая приложение кода нового правила к средству разъяснения неопределенности, когда определено, что соответствие входного сигнала попадает вне допустимых пределов.
Согласно настоящему изобретению, когда подается команда на замену правила в устройстве для управления неопределенностью, определяется, попадает ли соответствие входного сигнала по отношению к функции предыдущего члена в допустимые пределы для изменения правила. Изменение правила осуществляется только в том случае, если соответствие попадает в допустимый предел, то есть только тогда, когда определено, что выход разъяснения неопределенности не будет внезапно изменяться, даже если осуществлено изменение правила. Вследствие этого предотвращается вредное воздействие на управляемый объект внезапного изменения управляющего выхода из-за изменения правила. Если установлено измененное новое правило, то автоматически определяется, не будет ли создаваться внезапное изменение на выходе разъяснения неопределенности, когда изменяется правило. Если это условие удовлетворяется, производится изменение правила. В результате этого больше нет необходимости в затруднительном контроле и проверке и время, требуемое для изменения правила, может быть сокращено.
Система управления согласно настоящему изобретению отличается наличием большого количества взаимно независимых управляющих устройств, играющих различные роли от одного к другому для управления одним контролируемым объектом, средством решения параметра для получения посредством разъяснения неопределенности параметра, связанного с комбинационным отношением выходов большого количества управляющих устройств, и синтезирующим средством для создания регулируемой переменной, которая может быть подана к управляемому объекту, посредством объединения выходов большого количества управляющих устройств на основе параметров, решение которых выбрано с помощью средств решения параметров.
Вышеупомянутый параметр может представлять собой весовой коэффициент для комбинации выходов большого количества управляющих устройств. Кроме того, параметром могут быть данные для выбора любого управляющего устройства из их большого количества. В этом случае синтезирующее средство выдает выход выбранного управляющего устройства в виде регулируемой переменной. В качестве вышеупомянутого управляющего устройства может быть использовано линейное управляющее устройство, например, PID управляющее устройство и т.д., или нелинейное управляющее устройство, например, устройство управления неопределенностью. Одно или несколько из большого количества устройства могут представлять собой PID управляющее устройство, а другие могут быть устройствами управления неопределенностью.
В системе управления имеющей большое количество взаимно независимых управляющих средств, играющих разные роли от одного к другому для управления одним контролируемым объектом, способ контроля системы управления, при котором управление заменой осуществляется посредством разъяснения неопределенности согласно настоящему изобретению, отличается решением с помощью разъяснения неопределенности параметра, взаимосвязанного с комбинационным отношением выходов большого количества управляющих устройств, с комбинированием выходов большого количества управляющих устройств на основе решенного параметра и подачей комбинированного значения к управляемому объекту в качестве регулируемой переменной.
Система управления, в которой управление заменой осуществляется посредством разъяснения неопределенности, согласно настоящему изобретению, отличается наличием большого количества управляющих устройств для выдачи регулируемых переменных данных независимо друг от друга, когда подаются данные, взаимосвязанные с управляемым объектом, и избирательным средством решения с помощью разъяснения неопределенности, управляющее устройство которого среди большого количества управляющих устройств должно иметь подаваемые к нему данные, взаимосвязанные с управляемым объектом.
Соответственно системе управления и способу управления согласно настоящему изобретению одно управляющее устройство среди большого количества таких устройств может быть выбрано посредством разъяснения неопределенности, причем данные, выдаваемые большим количеством управляющих устройств, могут быть соответствующим образом скомбинированы и поданы к управляемому объекту в виде регулируемой переменной. В результате управляемым объектом, имеющим комплексную характеристику, можно управлять плавно и точно. Поскольку замена и решение комбинационного отношения выполняются разъяснением неопределенности, нет необходимости в использовании сложных цифровых арифметических выражений и управление может выполняться алгоритмом, который характеризует опытные данные, непосредственно в виде правила неопределенности. В результате при простом устройстве возможен весьма точный контроль.
На фиг. 1-3 представлен первый вариант осуществления устройства формирования нечеткого управляющего воздействия (управления неопределенностью) согласно настоящему изобретению, в котором может изменяться правило, при этом: на фиг. 1 представлена блок-схема, иллюстрирующая электрическую конструкцию устройства управления неопределенностью; на фиг. 2 - диаграмма времени, иллюстрирующая работу каждой цепи согласно фиг.1; на фиг. 3 - схема, иллюстрирующая вариант осуществления, при котором настоящее изобретение реализуется посредством программного обеспечения, при этом показан процесс управления работой устройства управления неопределенностью.
На фиг. 4-10 представлен второй вариант осуществления устройства управления неопределенностью согласно настоящему изобретению, в котором может быть изменено правило, при этом: на фиг.4 представлена блок-схема, иллюстрирующая электрическую конструкцию устройства управления неопределенностью; на фиг. 5 - диаграмма, иллюстрирующая некоторые из цепей, содержащихся в блоке логических выводов, представленном на фиг. 4, а также взаимосвязь этих цепей; на фиг. 6 - диаграмма, показывающая конкретную конструкцию функциональной цепи; на фиг.7 представлен график, оказывающий входные/ выходные характеристики функциональной цепи; на фиг. 8 представлена диаграмма, показывающая функциональную генерационную цепь неопределенности, реализуемую использованием переключающей матрицы; на фиг. 9 - конкретная конструкция символики согласно фиг. 8; на фиг. 10 - схема, которая иллюстрирует вариант осуществления, при котором настоящее изобретение реализуется программным обеспечением, при этом показан процесс управления устройством, предназначенным для управления неопределенностью.
На фиг. 11-16 представлен вариант осуществления системы управления согласно настоящему изобретению, в которой замена контролируется посредством разъяснения неопределенности; на фиг.11 - блок-схема, иллюстрирующая общую конструкцию системы управления; на фиг. 12 - график, показывающий пример функции входных данных; на фиг.13 - график, показывающий пример функции коэффициента; на фиг. 14а-14е представлены примеры правил; на фиг. 15 представлена диаграмма, на которой роли большого количества управляющих устройств представлены в прямоугольной системе координат; на фиг. 16 представлена блок-схема, показывающая другой вариант осуществления.
Первый вариант осуществления.
Фиг. 1, которая иллюстрирует вариант осуществления устройства управления неопределенностью, согласно настоящему изобретению, в котором правило может быть заменено, представляет собой блок-схему, показывающую электрическую конструкцию устройства управления неопределенностью. На фиг. 2 представлена диаграмма времени для описания работы каждой цепи согласно фиг.1.
Блок 10 нечеткой логики (средство управления неопределенностью, которое также упоминается как контроллер неопределенности или блок разъяснения неопределенности и т. д.) осуществляет разъяснение неопределенности согласно заданному правилу (правило "если ..., то ..."). Блок 10 включает в себя не только устройства специального значения (любое аналогового или цифрового типа) для разъяснения неопределенности (см., например, "Никкей Электроникс", 27 июля 1987, с. 148-152, опубликованный Мак Гроу Хилл), но также компьютеры двоичного типа и процессоры, запрограммированные таким образом, чтобы осуществлять разъяснение неопределенности.
Блок 10 управления неопределенностью выполняет разъяснение неопределенности в соответствии с установленным правилом в зависимости от данного управляющего входа (контролируемая переменная или смещение между заданным значением и контролируемой переменной) и генерирует выход разъяснения неопределенности, который является результатом этого разъяснения. Выход разъяснения неопределенности подается блоку 13 запоминания (цепи выборки/блокировки) и к блоку 20 формирования соотношения сигналов.
Цепь 13 выборки/блокировки содержит переключающую цепь 14, конденсатор 15 и буферный усилитель 16. Входная клемма буферного усилителя 16 подсоединена к выходной клемме блока 10 управления неопределенностью через переключающую цепь 14 и к конденсатору 16, один конец которого заземлен. Переключающая цепь 14 для включения/выключения управляется управляющим сигналом, создаваемым блоком синхронизации 12 (цепью управления хронированием). Выход цепи 13 выборки/блокировки подводится к блоку коэффициента (или цепи усилителя) 21 блока 20.
Управляющее правило для разъяснения неопределенности в блоке 10 управления неопределенностью устанавливается переключающим блоком 11 установки правила. Правило, устанавливаемое переключающим блоком 11 установки правила, считается в блоке 10 управления неопределенностью, когда переключатель SW включается. Изменение управляющего правила также возможно посредством выполняемой переключением замены внутри переключающего блока 11 установки правила. Переключатель SW включается посредством установки считывающего сигнала, выдаваемого цепью 12 управления хронированием.
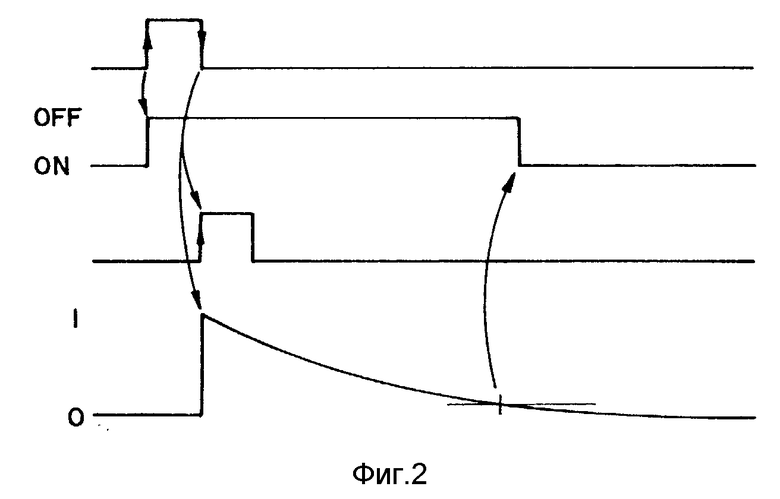
Блок 20 формирования соотношения сигналов содержит цепь 23 генерации функций, вышеупомянутые блоки 21, 22 коэффициентов и сумматор 25, который суммирует выходы блоков 21, 22 коэффициентов. Цепь 23 генерации функций выдает функциональный сигнал, который резко возрастает синхронно с триггерным сигналом, создаваемым цепью 12 управления хронированием, и который затем с течением времени постепенно ослабевает (например, сигнал, который падает линейно, по экспоненте или ступенчато). Функциональный сигнал, выдаваемый цепью 23 генерации функции, подается к блокам 21 и 22 коэффициентов, коэффициенты (или усиления) которых α и 1- α заменяется функциональным сигналом и также подаются к цепи 12 управления хронированием. Коэффициент α принимает значение в диапазоне от 1 до 0 и изменяется таким же образом, что и вышеупомянутый функциональный сигнал. Цепь 23 генерации функции обеспечивается переменным резистором 24 для регулирования постоянной времени выходного функционального сигнала. В результате степень уменьшения функционального значения по отношению к пройденному времени может быть определена надлежащим образом. Выход сумматора 25 представляет собой управляющее воздействие (регулируемую переменную), подаваемое к управляемому объекту.
Когда управляющее правило изменяется в течение работы цепи 10 управления неопределенностью, оператор осуществляет переключение переключателя в переключающем блоке 11 установки правила таким образом, что устанавливается желаемое правило. Модификационный триггерный сигнал подается к цепи 12 управления хронированием в тот момент, когда должно быть изменено правило.
Цепь 12 управления хронированием подает управляющий сигнал к переключающей цепи 14 цепи 13 выборки/блокировки синхронно с фронтом модификационного триггерного сигнала. В результате этого переключающая цепь 14 выключается. Соответственно, выход (напряжение) разъяснения неопределенности цепи 10 управления неопределенностью, преобладающий непосредственно перед выключением переключающей цепи 14 (то есть непосредственно перед заменой правила), блокируется в конденсаторе 15.
Далее устанавливаемый сигнал считывания подается к переключателю SW синхронно с хвостовой границей модификационного триггерного сигнала. В результате переключатель SW временно включается и новое правило, установленное в переключающем блоке 1 установки правила, принимается цепью 10 управления неопределенностью. С этого момента цепь 10 управления осуществляет разъяснение неопределенности согласно заново установленному правилу.
Кроме того, цепь 12 управления хронированием подает триггерный сигнал к цепи 23 генерации функции у хвостовой границы модификационного триггерного сигнала. Цепь 23 генерирует функциональный сигнал, который мгновенно возрастает (в это время коэффициент α становится равным 1), а затем постепенно ослабевает.
Выход управления неопределенностью, который преобладает непосредственно перед заменой правила и который блокируется в цепи 13 выборки/блокировки, подается к блоку 21 коэффициента. Выход разъяснения неопределенности (выход после изменения правила) цепи 10 управления неопределенностью подается к блоку 22 коэффициента. Блок 21 коэффициента подает выходной сигнал разъяснения неопределенности, который преобладает непосредственно перед заменой правила, с умножением его на коэффициент α. Блок 22 коэффициента подает выход разъяснения неопределенности, который преобладает после замены правила, с умножением его на коэффициент ( I - α ). Выходы блоков 21 и 22 коэффициента подаются к сумматору 25, который суммирует эти выходы и подает сумму в виде выхода управления неопределенностью.
Коэффициент α с течением времени монотонно уменьшается, что показано на фиг.2. Поэтому, когда правило изменяется, процентное содержание управляющего выхода из выходной цепи 20 замены, которая занята выходом разъяснения неопределенности, преобладающим непосредственно до замены правила, с течением времени постепенно уменьшается, в то время как процентное содержание управляющего выхода, который занят выходом разъяснения неопределенности после замены правила, с течением времени постепенно увеличивается. Соответственно, управляющий выход резко не изменяется с заменой правила, и вместо этого происходит его плавное изменение от величины, непосредственно предшествующей замене правила, до величины, имеющей место после замены правила.
Когда функциональный сигнал (коэффициент α ) падает ниже заданного порогового уровня с изменением фиксированного времени от момента замены правила, управляющий сигнал, который цепь 12 управления хронированием подает к переключающей цепи 14 цепи 13 выборки/блокировки, заканчивается и поэтому переключатель 14 выключается. В результате выход разъяснения неопределенности цепи 10 управления неопределенностью все время подается к цепи 13 выборки/блокировки. Кроме того, поскольку коэффициент α становится равным нулю или почти равным нулю, выход разъяснения неопределенности цепи 10 управления неопределенностью, который преобладает после замены правила, подается в виде выхода управления неопределенностью через блок 22 коэффициента и сумматор 25.
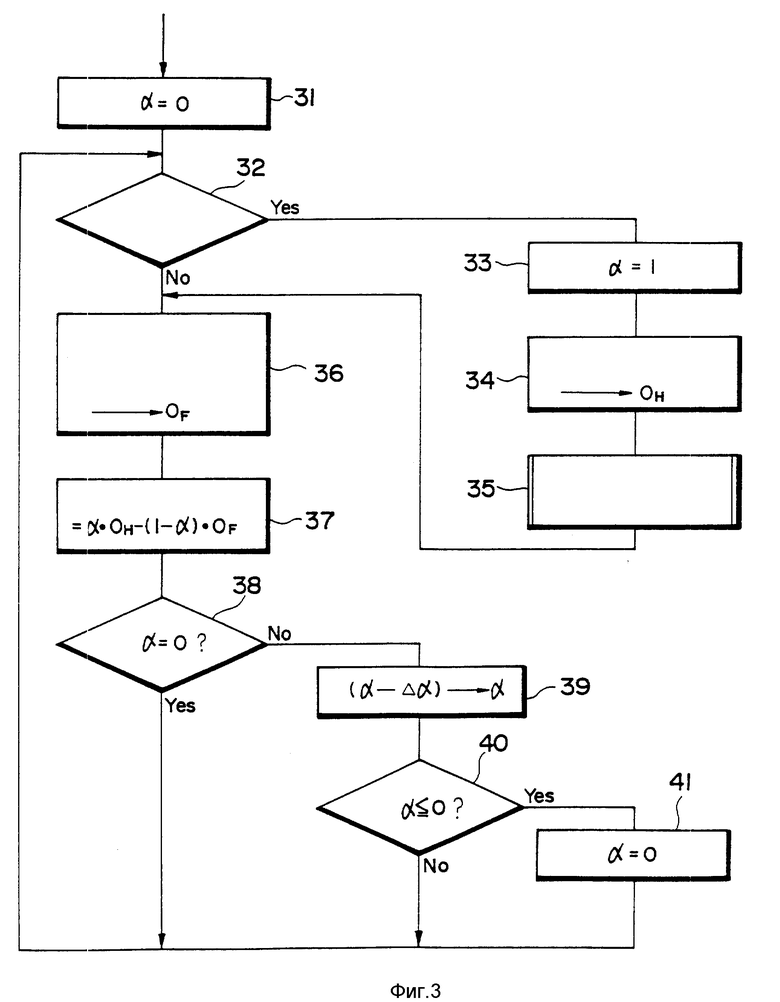
На фиг. 3 представлена схема, иллюстрирующая пример процесса работы устройства управления неопределенностью в том случае, когда настоящее изобретение реализуется программным обеспечением в компьютерной системе. В этом случае разъяснение неопределенности также реализуется программным обеспечением компьютерной системы.
Во-первых выясняется параметр α (стадия 31), который решает комбинационное отношение (процентное содержание или нагружение для добавления выхода разъяснения неопределенности непосредственно до замены правила, к выходу разъяснения неопределенности после замены правила). Затем определяется (стадия 32), должно ли быть заменено разъяснения неопределенности (то есть имеется ли ввод команды на замену правила). Когда правило должно быть заменено (ДА на стадии 32), параметр α устанавливается равным 1 и запоминается (стадии 33, 34) величина OH разъяснения неопределенности, преобладающая непосредственно перед заменой правила. Затем заменяется правило (стадия 35).
В том случае, когда команда на замену правила отсутствует (включая также случай), когда замена правила уже произведена) (НЕТ на стадии 32), разъяснение неопределенности осуществляется в зависимости от входной величины и запоминается (стадия 36) эта величина OF разъяснения. Далее вычисляется величина выхода управления неопределенностью в соответствии с уравнением αOH+(1-α)OF, используя параметр α , запоминаемую величину OH разъяснения, преобладающую непосредственно перед заменой правила, и текущую величину OF разъяснения, и вычисленная величина подается в качестве управляющего выхода (стадия 37).
Далее определяется равен ли O параметр α (стадия 38). Если параметр α не равен O (НЕТ на стадии 38), то минутное количество Δα (O < Δα < 1) вычитается из текущего параметра α и результат устанавливается в качестве нового параметра α (стадия 39). Затем определяется, является ли новый параметр α отрицательным (стадия 40). Если параметр α положителен (НЕТ на стадии 40), программа возвращается к стадии 32 и работа на стадиях 36-39 повторяется. В результате параметр α с течением времени постепенно уменьшается. Поэтому на выходе управления неопределенностью имеет место уменьшение процентного содержания выхода разъяснения неопределенности, преобладающего непосредственно перед заменой правила, и увеличение процентного содержания выхода разъяснения неопределенности, который следует после замены правила.
Когда новый параметр α становится отрицательным, α принудительно устанавливается равным O25 (стадия 41).
В том случае, когда параметр α равно O (ДА на стадии 38), работа по обновлению параметра α не осуществляется и программа возвращается на стадии 32, так что повторяется работа на стадиях 36, 37. В этом случае величина OF разъяснения неопределенности, преобладающая после замены правила, становится подаваемым выходом управления неопределенностью.
Согласно процессу, представленному на схеме, показанной на фиг. 3, параметр α постепенно уменьшается на фиксированную величину Δα. Однако, это на налагает ограничения на изобретение, для него будет достаточно, если параметр уменьшается монотонно. Соответственно можно и не говорить о том, что может быть принято устройство, в котором параметр α постепенно уменьшается, например, по экспоненте.
Второй вариант осуществления.
Ниже будет описан другой вариант осуществления формирования нечеткого управляющего воздействия (устройство для управления неопределенностью), в котором правило может быть изменено согласно настоящему изобретению. Этот вариант осуществления относится к контроллеру неопределенности такого типа, в котором функция членов выражается распределением напряжения, которое возникает на большом числе линий сигналов. Здесь изобретение применяется к устройству, которое осуществляет разъяснение неопределенности посредством операции МИН/МАКС.
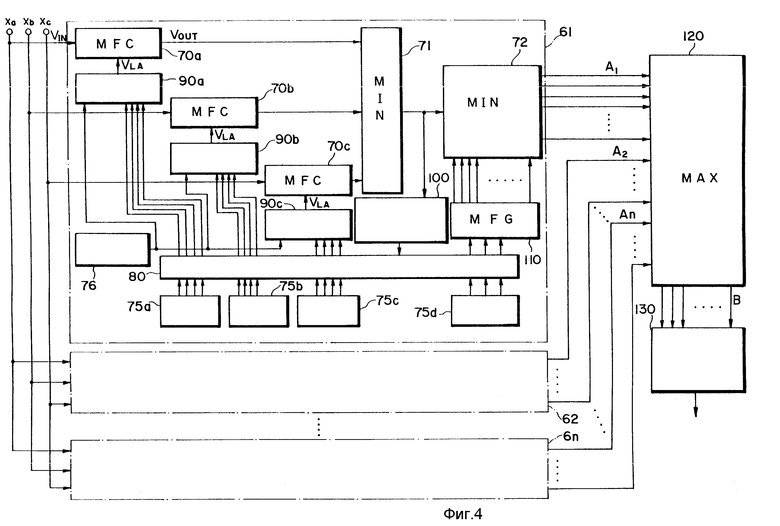
На фиг. 4 представлена блок-схема, иллюстрирующая устройство для управления неопределенностью, выполненное согласно этому изобретению.
Устройство содержит N блоков 61-6n логических выводов, которое соответствует количеству установленных управляющих правил. Каждый блок 6i логических выводов (i = IoC n) снабжен функциональными цепями (далее указываемыми как ФЦ) 70а, 70в, 70с, количество которых (три в этом варианте осуществления) равно количеству типов входных переменных Xa, Xb, Xc. Совокупность функциональных цепей 70а-70с, которые характеризуют размытое множество, представляют блок нечеткой логики и описываются предыдущим членом отношения в управляющем правиле, выходными функциональными значениями степени приемлемости по отношению к входным переменным. Выходы функциональных цепей 70а-70с поступают в МИН цепи 71, которая подвергает эти сигналы МИН операции.
Создана цепь (далее указывается как ГФ) 110, которая генерирует функцию, характеризующую размытое множество, описываемое последующим членом в управляющем правиле. Цепь 110 выдает функцию, характеризуемую напряжением, распределенным на множестве (m, например 25) выходных линий. Функция подается к МИН цепи (цепь отбрасывания членов) 72. МИН цепь 72 выполняет МИН операцию между каждой выходной величиной, характеризующей функцию членов, создаваемую цепью 110 генерации функции, и результатом МИН операции, выдаваемым цепью 71, и выдает функцию, которая характеризует результаты разъяснения, в виде сигналов напряжения, распределенных на m - количество линий (выход Ai; i = 1 - n).
Результаты разъяснения A1- An, выдаваемые блоками 61-6n логических выводов, подаются к МАКС цепи 120. Затем эти результаты подвергаются МАКС операции, а окончательные результаты разъяснения В получаются в виде сигналов напряжения, подобным образом распределения на m - количество линий. Цепь 130 центра гравитации выполнена для того, чтобы получить определенный выход (неразмытый выход) из результатов разъяснения В.
В каждом блоке 6i логических выводов функции в функциональных цепях 70а-70с и генерационной цепи 110 устанавливаются в заданных формах и заданных положениях в зависимости от управляющего правила. Форма и положение функции могут изменяться. Замена правила реализуется изменением формы, либо положения функции, или того и другого. Решение положений функций функциональных цепей 70a-70c дается маркировочным напряжением VLA, которое выдается каждой из цепей 90a, 90b, 90c генерации маркировочного напряжения.
Можно изменить управляющее правило даже в течение выполнения разъяснения неопределенности. Три функции предыдущего члена устанавливаются или изменяются посредством установки в установочных цифрах переключающих блоках 75a, 75b, 75c кодов (упоминаемых как метки) функций, которые должны быть установлены (или новых функций для замены). Эти коды правил фиксируются в блоке 80 фиксации кода правила преобразования (фиксирующей цепи 80) во время, допускаемое схемой сравнения 100 (цепью 100 управления задержкой замены правила), откуда подаются к соответствующей цепи 90a, 90b, 90c генерации меточного напряжения. Установка кода функции последующего члена осуществляется посредством использования цифрового переключающего блока 75d. Под контролем управляющей цепи 100 код, установленный в цифровом переключающем блоке 75d, подается к цепи 110 генерации функции после подобной фиксации в фиксирующей цепи 80 и осуществляется изменение последующей функции для изменения управляющего правила.
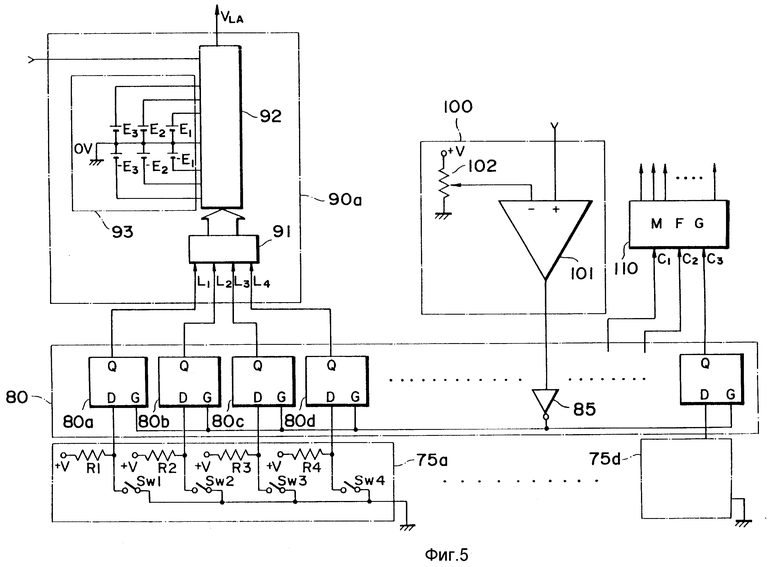
На фиг. 5 представлен конкретный пример устройства и взаимосвязи цифрового переключающего блока 75а, цепи 80 фиксации данных, цепи 90а генерации меточного напряжения, цепи 100 управления запрещением замены правила и цепи генерации функции 110.
Код предыдущей функции характеризуется четырьмя битами, поэтому цифровой переключающий блок 75а включает в себя четыре переключателя SW1 oC SW4. То же самое действительно и для других цифровых переключающих блоков 75b, 75c. Одни концы переключателей SW1 oC SW4 соединены друг с другом и заземлены. Другие концы переключателей SW1 oC SW4 соединены с клеммами D - входа соответствующих D - триггеров 80а-80d, содержащихся в цепи 80 фиксации данных. Другие концы переключателей SW1 oC SW4 дополнительно соединены с клеммами положительного напряжения через вытяжение сопротивления соответственно R1oC R4. В результате в соответствии с включенным/выключенным состоянием переключателей SW1 oC SW4 входные сигналы с уровнями L, H подаются к D - входным клеммам D - триггеров 80а-80d.
Блок 61 логических выводов включают в себя цепь 100 управления задержкой изменения правила. Цепь 100 подает новое правило, которое устанавливается в цифровом переключающем блоке 75а и т.д. в течение выполнения разъяснения неопределенности, к функциональным цепям 70а-70с и цепи 110 и т.д. в условиях, при которых в управляющем выходе не будет создаваться резкая флуктуация, и запрещает замену правила функциональных цепей и цепи генерации в том случае, когда управляющий выход будет претерпевать внезапную флуктуацию.
Цепь 100 управления задержкой изменения правила образуется компаратором 101 и цепью 102 базового напряжения. Напряжение, характеризующее результат МИН операции, выдаваемый МИН цепью 71, подается к положительной входной клемме компаратора 101, а базовое напряжение, выдаваемое цепью 102 базового напряжения, подводится к отрицательной входной клемме компаратора. Выход от компаратора 101 подается к клемме G входа хронирования каждого из D - триггеров 80а-80d через инвертор 85. Когда результат МИН операции, выдаваемый МИН цепью 71, выше базового напряжения, изменение правила посредством цифрового переключающего блока 75a и т.д. вызывает внезапное изменение выхода управления неопределенностью. Поэтому для того, чтобы это предотвратить, выходной сигнал H - уровня от компаратора 101 подается как сигнал L - уровня к каждой G входной клемме D - триггеров 80а-80d через инвертор 85. Соответственно, триггеры 80а-80d не будут работать. В том случае, когда результат МИН операции, выдаваемый МИН цепью 71, ниже, чем базовое напряжение, можно полагать, что замена правил посредством цифрового переключающего блока 75a и т.д. не будет вызывать внезапного изменения выхода управления неопределенностью.
В это время выход компаратора 101 имеет уровень L и поэтому сигнал хронирования с уровнем H подается к триггерам 80a-80d. Триггеры 80а-80d фиксируют код, установленный в цифровом переключающем блоке 75а и подают код L1oC L4 к цепи 90а генерации базового напряжения.
Коды правила, установленные в других цифровых переключающих блоках 75b, 75c, также подобным образом подаются к соответствующим цепям 90b, 90c генерации меточного напряжения через фиксирующую цепь 80 только в том случае, когда замена правила допускается управляющей цепью 100.
Функция последующего члена представляется кодом из трех бит, поэтому цифровой переключающий блок 75d включает в себя три переключателя. Код, который установлен в цифровом переключающем блоке 75d, также вводится в цепь 110 генерации функции в виде кодов C1, C2, C3 через фиксирующую цепь 80 только в том случае, когда замена правила допускается управляющей цепью 100.
Цепь 90а генерации меточного напряжения образуется декодером 91, переключающей матрицей 92 и цепью 93 генерации базового напряжения. Избирательная цепь образуется декодером 91 и переключающей матрицей 92.
Цепь 93 генерации базового напряжения генерирует семь типов заданных меточных напряжений (базовых напряжения) от - Е3 до Е3 и выводит эти напряжения на соответствующую линию из семи различных линий. Эти меточные напряжения подводятся к переключающей матрице 92.
Выходное напряжение аналоговой смещающей цепи (цепи генерации произвольно выбранного напряжения) 76, которая выдает произвольно выбранное напряжение (тем не менее напряжение между - Е3 - Е3), также подводится к переключающей матрице 92.
Цифровой код L3, L2, L1, L0 из четырех бит, как уже упоминалось, подается к декодеру 91. Декодер 91 декодирует код и управляет переключающей матрицей 92. Точнее, среди восьми типов входных напряжений, включая выходное напряжение аналоговой смещающей цепи 76, подводимое к переключающей матрице 92, то, которое обозначено цифровым кодом L3oC L0, выдается из переключающей матрицы 92 в качестве меточного напряжения VLA. Меточное напряжение VLA подается к функциональной цепи 70а.
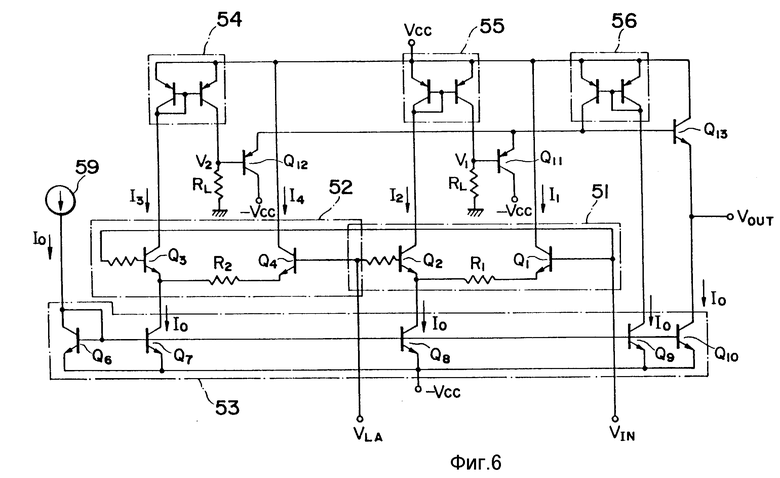
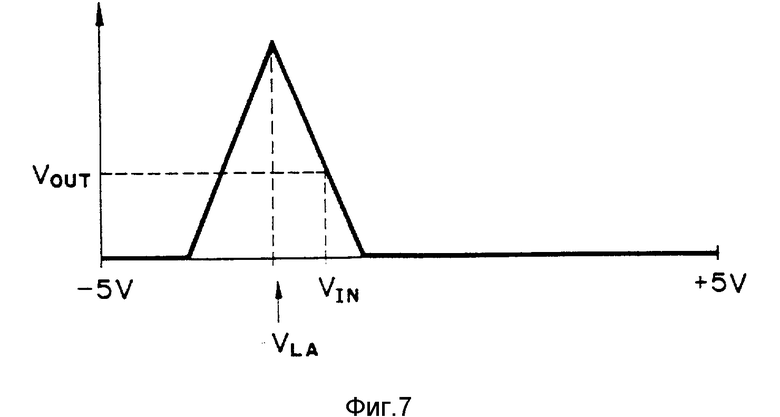
Главным образом, согласно треугольной функции, имеющей пик в положении подаваемого меточного напряжения VLA, функциональная цепь 70а генерирует выходное напряжение VOUT, характеризующее соответствующее значение функции, когда подается входное напряжение VIN (напряжение, характеризующее входную переменную). Конкретный пример конструкции этой функциональной цепи 70а представлен на фиг. 6. Другие функциональные цепи 70в и 70с сконструированы подобным образом.
Функциональная цепь 70а включает в себя источник 59 тока Io и зеркало 53 тока с большим количеством выходов, приводимое этим источником 59 тока. Зеркало 53 включает в себя транзисторы Q6, Q7, Q8, Q9 и Q10. Соответственно, ток I0, равный току источника 59, течет к транзисторам Q7, Q8, Q9 и Q10, так что эти транзисторы Q7oC Q10 действуют в качестве источника тока.
Функциональная цепь 70а включает в себя две дифференциальных цепи 51 и 52. Вначале будет описана дифференциальная цепь 51.
Дифференциальная цепь 51 включает в себя два транзистора Q1 и Q2, между эмиттерами которых подсоединен резистор R1. Входное напряжение VIN, а именно входная переменная Xa, подается к базе одного транзистора Q1, а меточное напряжение VLA подается к базе другого транзистора Q2. Ток I0 подается к эмиттерам обоих транзисторов Q1, Q2 транзистором Q8, служащим в качестве источника тока.
Пусть I1 представляет собой ток, который течет в транзистор Q1, а I2 - ток, который течет в транзисторе Q2. Когда сохраняется VIN < VLA, ток I2 = I0 течет в транзистор Q2, а в транзистор Q1 ток (I1 = O) не течет. Когда входное напряжение VIN превышает меточное напряжения VLA, ток I2 транзистора Q2 линейно ослабевает с увеличением входного напряжения VIN, а ток I1, который течет в транзистор Q1, линейно увеличивается от нуля. Когда достигается зависимость VIN=VLA+R1I0, устанавливаются соотношения I2 = O, I1 = I0. Это состояние сохраняется в зоне VIN большей, чем предыдущая.
Создано зеркало 55 тока, при этом оно приводится в действие током I2, который течет в транзистор Q2. Резистор RL подсоединен к выходной стороне зеркала 55 тока. Пусть напряжение, развиваемое на резисторе RL, будет напряжением V1. Поскольку напряжение V1 задается как V1=I2RL, оно является постоянным вплоть до предписанного входного напряжения по отношению к увеличению входного напряжения VIN и затем меняется таким образом, чтобы достичь нулевого уровня после линейного понижения. Наклон участка, на котором напряжение V1 линейно снижается, задается отношением RL/R1. Этот наклон может быть изменен путем изменения величины резистора R1.
Другая дифференциальная цепь 52 имеет ту же конструкцию, что и дифференциальная цепь 51. Пусть R2 - это резистор, подсоединенный между эмиттерами двух транзисторов Q3 и Q4, а I3, I4 - это токи, которые текут в транзисторы Q3, Q4. Дифференциальная цепь 52 приводится в действие транзистором Q7, служащим в качестве источника тока. Зеркало 54 тока приводится в действие током I3, который течет в транзистор Q3. Поскольку ток I3 течет в резистор RL, соединенный с выходной стороной зеркала 54 тока, напряжение V2, падающее по резистору RL, характеризуется выражением V2= I3•RL. По отношению к изменению входного напряжения VIN напряжение V2 находится на нулевом уровне вплоть до предписанного входного напряжения, а затем линейно увеличивается и достигает постоянного уровня. Наклон участка, на котором напряжение V2 линейно увеличивается, задается отношением RL/R2.
Функциональная цепь 70а дополнительно снабжена МИН цепью с двумя входами. МИН цепь с двумя входами выдает сигнал о том, какое из напряжений на двух входах меньше.
МИН цепь с двумя входами содержит компаратор и компенсатор. Компаратор образуется транзисторами Q11, Q12, эмиттеры которых соединены друг с другом, и зеркалом 56 тока, которое действует в качестве источника тока для привода этих транзисторов. Зеркало 56 тока приводится в действие транзистором Q9. Поскольку вышеупомянутые напряжения V1 и V2 подаются к основаниям транзисторов соответственно Q11 и Q12, транзистор, имеющий напряжение (представленное здесь, как Vmin), меньше этих напряжений V1 и V2, подаваемых к его основанию, оказывается электропроводным, а другой транзистор отсекается. Соответственно, напряжение Vmin+VEB, которое получается посредством добавления VEB эмиттера/основания электропроводящего транзистора к напряжению Vmin, появляется на эмиттерах. Это напряжение подводится к основанию транзистора Q13.
Компенсатор, который образуется транзистором Q13 и транзистором Q10, который служит для формирования тока этого транзистора, компенсирует напряжение VBE, которое появляется в виде ошибки вычисления на выходе компаратора. В результате снижения напряжения VEB на транзисторе Q13, Vmin появляется в виде выходного напряжения на его эмиттере. Это выходное напряжение показано на фиг. 7.
Таким образом функция, пиковое положение которой представляет собой меточное напряжение VLA, устанавливается в функциональной цепи 70а и получается выходное напряжение VOUT, которое характеризует значение функции, соответствующее входу VIN, что показано на фиг. 7.
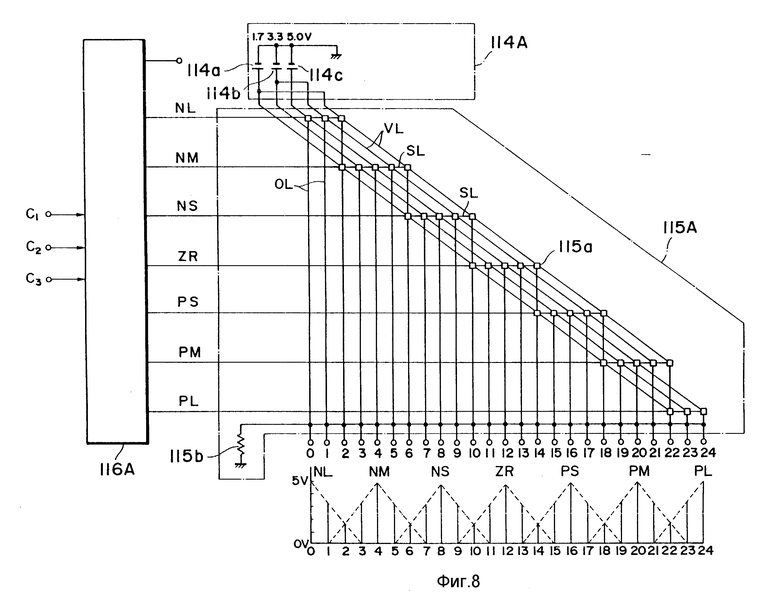
На фиг. 8 и 9 представлен пример цепи 110 генерации функции, использующей переключающую матрицу в виде коммутационной решетки. На фиг. 8 семь типов функции, которые выводятся с 25 выходных клемм, пронумерованных от 0 до 24, цепи генерации функций, представлены ниже этих выходных клемм.
Для ясности значения этих выходных функций в количественном отношении оценены на четырех уровнях. Эти четыре уровня соответствуют напряжениям 0; 1, 7; 3,3 и 5,0. Четыре уровня обусловлены генерационной цепью 114А распределения напряжения. Цепь 114А снабжена тремя источниками напряжения 114a, 114b и 114c для действительного значения неопределенности, с напряжениями, составляющими 1, 7; 3,3 и 5,0 V. Пять линий VL напряжения, проходящих по диагонали на фиг. 8, выходят из цепи 114А. Центральная линия соединена с источником напряжения 114C, линии с каждой стороны от центральной линии подсоединены к источнику напряжения 114b, а две самых удаленных линии подсоединены к источнику напряжения 114A.
Декодер 116A представляет собой восьмиразрядных декодер. Двойной сигнал из трех бит (C1, C2, C3, характеризующий метку, создаваемую цепью 80 фиксации данных, поступает к декодеру 116A. Декодер 116A выдает сигнал H-уровня на любой из его восьми выходных клемм в соответствии с кодом, характеризуемым этим входным сигналом. Восемь выходных клемм соответствуют семи типам выводов и одному без обозначения. Например, сигнал H-уровня выдается на выходной клемме без обозначения, когда входной кодовый сигнал составляет 000, и на выходной клемме NL, когда входной кодовый сигнал составляет 001. Линии SL сигналов, указанные горизонтальными линиями на фиг. 8, отходят от этих выходных клемм, за исключением выходной клеммы без обозначения.
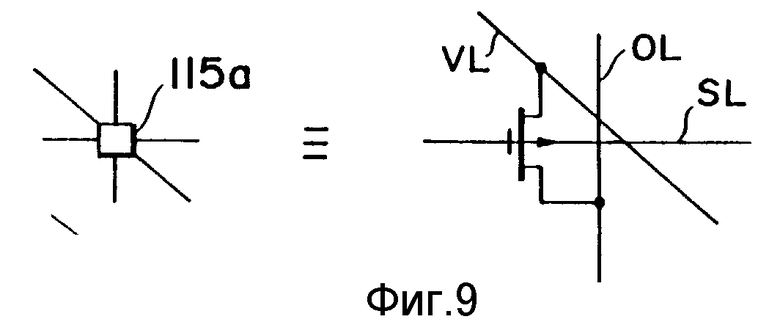
В переключающей матрице 115A выходные линии OL выводятся к 25 выходным клеммам из предписанных точек пересечения линий напряжения VL и линий сигналов SL. Символ 115a, который указывается небольшим квадратом на каждой из этих точек пересечения, представляет собой переключатель, установленный между линией напряжения VL и выходной линией OL, при этом включение/выключение контролируется напряжением на линии SL сигнала. Например, переключатель конструируется посредством MOS FET. Безусловно, представляет возможным создать два или более переключателя 115a на одной выходной линии OL. Все выходные линии заземляются через регистр 115b со стороны их выходной клеммы.
Когда двоичный сигнал из трех бит (C1, C2, C3), характеризующий метку, от цепи 80 фиксации данных подается к декодеру 116A в описанном выше устройстве, на любой из линий SL сигналов появляется сигнал уровня H, соответствующий этой метке, и переключатели 11a, созданные на этой линии сигнала, включаются. В результате каждое напряжение генерационной цепи 114a распределения напряжения появляется на соответствующей выходной клемме по выходным линиям OL через переключатели 115, которые включены, и поэтому выдается распределение напряжения, характеризующее функцию.
В описанном выше варианте осуществления замена правила выполняется в соответствии с настройкой посредством цифровых переключающих блоков 75a-75d. Однако, можно не говорить о том, что настоящее изобретение также пригодно и в отношении устройства для управления неопределенностью, в котором замена правила может быть выполнена не только посредством ручной операции, но и дистанционным управлением. Кроме того, изобретение также может быть применено к устройству для управления неопределенностью, реализуемому двоичным компьютером.
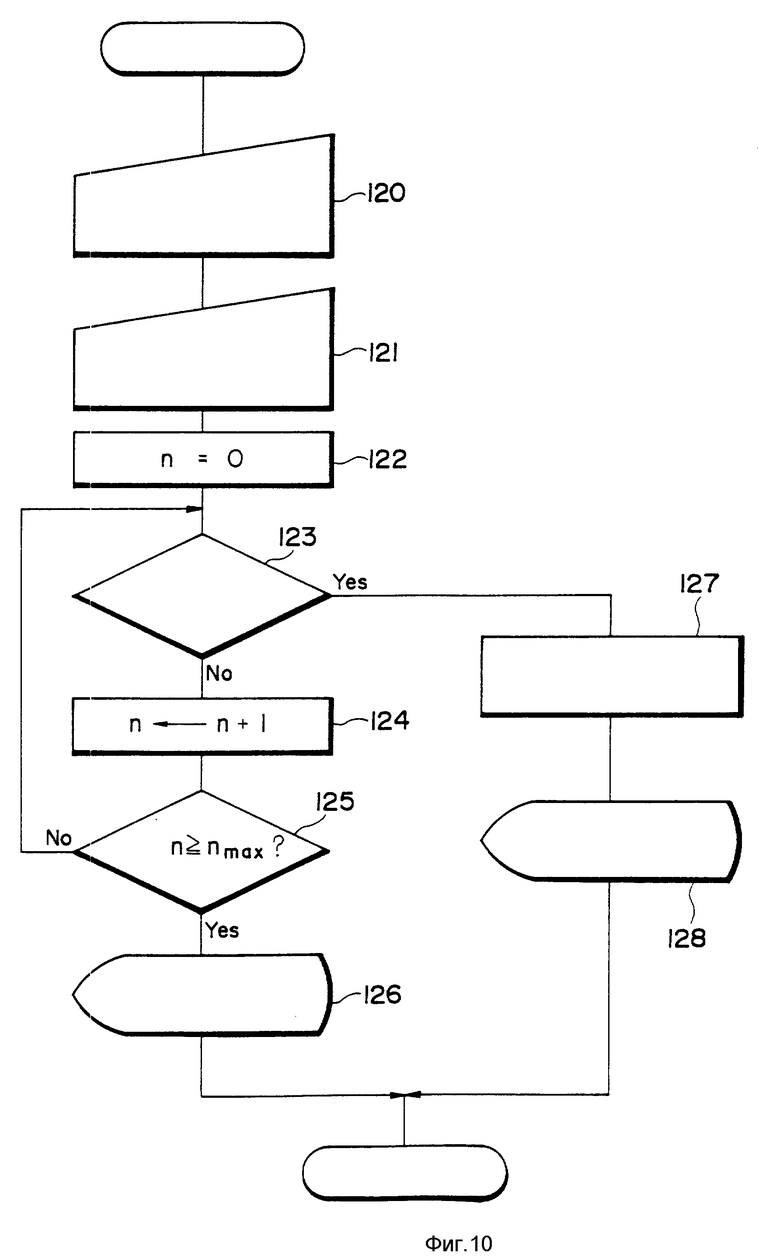
На фиг. 10 представлена схема, иллюстрирующая пример процесса работы устройства для управления неопределенностью в том случае, когда настоящее изобретение реализуется программным обеспечением компьютерной системы. В этом случае разъяснение неопределенности также реализуется программным обеспечением компьютерной системы.
Во-первых, количество правил, подлежащих замене, вводится оператором (стадия 120). Подробности замены правила вводятся из средства ввода замены правила (клавиатура или тому подобное) (стадия 121). После этого счетчик сбрасывается (стадия 122). Когда результат МИН операции предыдущего члена находится снаружи допустимых пределов, счетчик измеряет опорное время приостановки для временного приостановления замены правила с тем, чтобы предотвратить внезапное изменение управляющего выхода. Когда счетчик сброшен, определяется, находится ли значение МИН операции по указанию степени соответствия функции предыдущего члена, в допустимых пределах (стадия 123).
Если значение не находится в допустимых пределах (НЕТ на стадии 123), счетчик заполняется и определяется, достигнуто ли опорное время приостановки (стадии 124, 125). Работа на стадиях 123-125 продолжается до достижения опорного времени, пока на стадии 123 не будет получен ответ НЕТ. Когда опорное время проходит, дается отображение этого действия (стадия 126).
Если результат МИН операции находится в допустимых пределах (ДА на стадии 123), то управляющий выход не будет резко изменяться вследствие замены правила. Соответственно, содержание правила заменяется и дается отображение того, что замена выполнена (стадии 127, 128).
Третий вариант осуществления.
Далее будет описан вариант осуществления системы управления, в которой управление заменой осуществляется разъяснением неопределенности согласно настоящему изобретению.
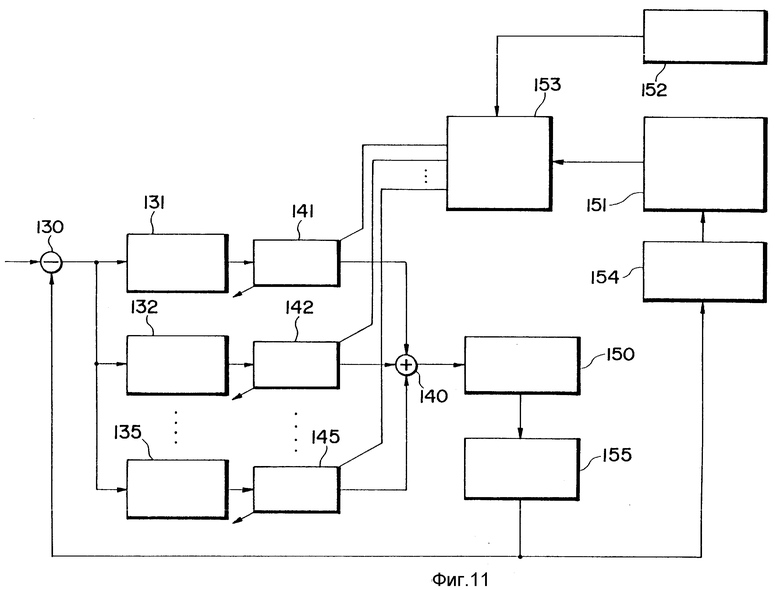
На фиг. 11 представлена общая конструкция системы управления, в которой управление одним управляемым объектом осуществляется путем использования большого количества устройств формирования управляющего воздействия (управляющих устройств). В этом варианте осуществления создано пять управляющих устройств 131, 132-135 для управления управляемым объектом 150. Хотя два управляющих устройства не представлены, позиции 133, 134 предназначены для них.
Управляющие устройства 131-135 осуществляют управление с обратной связью. Контролируемая переменная, выявленная на управляемом объекте 150 датчиком управляемого параметра (детектором) 155, подается к блоку рассогласования (вычитателю) 130. Вычитатель 130 вычисляет смещение между предполагаемым значением и обнаруженной контролируемой переменной, при этом смещение вводится в управляющее устройство 131-135. Можно не говорить о том, что контролируемая переменная может представить собой переменную не одного, а большого количества видов. Контролируемая переменная, выявляемая детектором 155, преобразуется в сигнал или данные приемлемой формы посредством входной цепи 154, после чего этот сигнал подается блоку 151 нечеткой логики (цепи разъяснения неопределенности). Цепь 151 разъяснения неопределенности, аналогового или цифрового типа, может быть цепью, которая определяет построение, предназначенное для разъяснения неопределенности, либо она может быть реализована двоичным цифровым компьютером общего назначения.
Выходные сигналы, выдаваемые управляющими устройствами 131-135 для управления определяемых объектов, входит в соответствующие блоки 141-145 коэффициентов (позиция 143, 144, предназначенные для двух из этих блоков коэффициентов, не показаны). Блоки 141-145 коэффициентов выдают соответствующие входные сигналы с умножением их на заданный коэффициент (коэффициент принимает значения от 0 до 1). Входной сигнал выдается в виде выходного сигнала без изменения, когда коэффициент равен 1, при этом прохождение входного сигнала через блок не происходит, когда коэффициент равен 0. Соответственно, когда коэффициенты принимают значение порядка 1 или 0, блоки 141-145 коэффициентов действуют в качестве стробирующей цепи. Выходные сигналы блоков 141-145 коэффициентов суммируются сумматором 140 и сумма подается к контролируемому объекту в виде регулируемой переменной.
Для управления блоками 141-145 коэффициентов имеются способ выбора и способ распределения. Способ выбора делает любой из коэффициентов пяти блоков 141-145 равным 1, а коэффициенты других блоков равными 0. То есть блоки 141-145 коэффициентов функционируют в качестве стробирующих цепей, одна из которых приводится в действие, а другие четыре блокируются. Согласно способу распределения коэффициенты иные, чем 1 и 0, подаются, по меньшей мере, к двум блокам 141-145 коэффициентов (сумма поданных коэффициентов всегда равна 1), а коэффициенты других блоков коэффициентов (если какие-либо имеются) равны 0. Согласно способу распределения регулируемые переменные, выдаваемые большим количеством управляющих устройств, взвешиваются и суммируются.
Как способ выбора, так и способ распределения устанавливается блоком 152 установки способа. Когда выбор способа сделан, управляющее устройство, которое должно быть выбрано, также настраивается блоком 152 установки способа. Сигнал, характеризующий установленный способ, подается к блоку 153 установки коэффициентов. Выбор решения в отношении коэффициентов при способе распределения осуществления в блоке 151 разъяснения неопределенности. Блок 153 установки коэффициентов контролирует блоки 141-145 коэффициентов таким образом, что когда сделан выбор способа, коэффициент блока коэффициентов, соответствующий выбранному управляющему устройству, равен 1, а коэффициенты всех других блоков коэффициентов равны 0. Когда установлен способ распределения, блок 153 установки коэффициентов обеспечивает каждый из блоков 141-145 коэффициентов коэффициентами, выбор решения в отношении которых делается в цепи 151 разъяснения неопределенности.
Далее будет описано разъяснение неопределенности для выдачи решения по коэффициентам, выполняемое в цепи 151 разъяснения неопределенности.
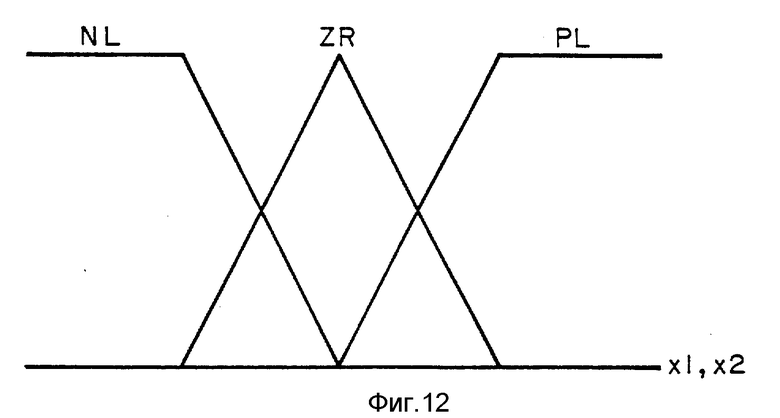
Пусть X1, X2 представляют собой входные данные, подаваемые к цепи 151 разъяснения неопределенности через входную цепь 154. Оба наименования входных данных X1, X2 могут представлять собой контролируемые величины (например, температуру, скорость и т.д.), выявляемые детектором 155, при этом входные данные X1 могут быть ее дифференцируемым значением (или интегральным значением). Пример функций этих наименований входных данных X1 и X2 представлен на фиг. 12. PL, ZR и NL представляют собой соответственно положительную, приблизительно нулевую и отрицательную величины. Наименования входных данных X1, X2 принимают положительные или отрицательные значения.
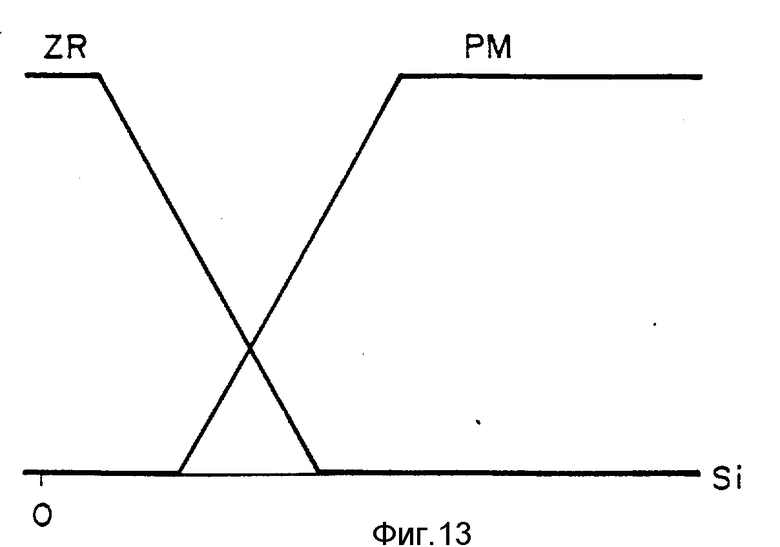
Пусть коэффициенты, передаваемые к блокам 141, 142, 143, 144 и 145 коэффициентов в способе распределения представлены соответственно как S1, S2, S3, S4 и S5. Пример функций для коэффициентов Si (i = 1 oC 5) представлен на фиг. 13. Здесь ZR и PM представляют собой приблизительно нулевую и положительную величину. Коэффициент Si равен нулю или принимает положительное значение.
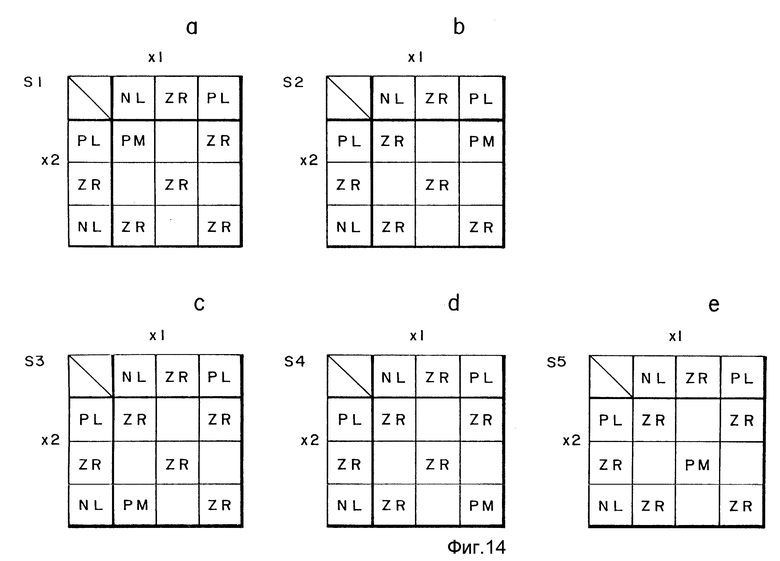
На фиг. 14a, 14b, 14c, 14d и 14e представлены примеры правил в табличной форме, которые предназначены для выдачи решения в отношении коэффициентов S1, S2, S3, S4 и S5; в соответствии с входными данными X1, X2. Например, верхняя левая колонка на фиг. 14а характеризует следующее правило: "Если X1 представляет собой NL, а X2 - PL, то S1 представляет собой PM".
Правило, представленное на фиг. 14а, указывает, что если X1 представляет собой весьма значительную и отрицательную величину, а X2 - весьма значительную и положительную величину, то коеффициент S 1 должен быть значительным и что в других случаях коэффициент S1 должен быть приблизительно равен 0, если X1 представляет собой весьма значительную и положительную величину и X2 представляет собой весьма значительную и положительную величину, то коэффициент S2 должен быть значительным, и что коэффициент S2 в других случаях должен быть приблизительно равен нулю.
Правило, представленное на фиг. 14c, указывает, что если X1 представляет собой весьма значительную и отрицательную величину, и X2 представляет собой весьма значительную и отрицательную величину, то коэффициент S3 должен быть значительным, и что в других случаях S3 приблизительно должен быть равен нулю.
Правило, представленное на фиг. 14d, указывает, что если X1 представляет собой весьма значительную и положительную величину, а X2 весьма значительную и отрицательную величину, то коэффициент S4 должен быть значительным, и что в других случаях коэффициент S4 приблизительно должен быть равен нулю.
Правило, представленное на фиг. 14e, указывает, что если X1 находится вблизи от нуля и X2 находится вблизи от нуля, то коэффициент S5 должен быть большим, и что в других случаях коэффициент S5 должен быть приблизительно равен нулю.
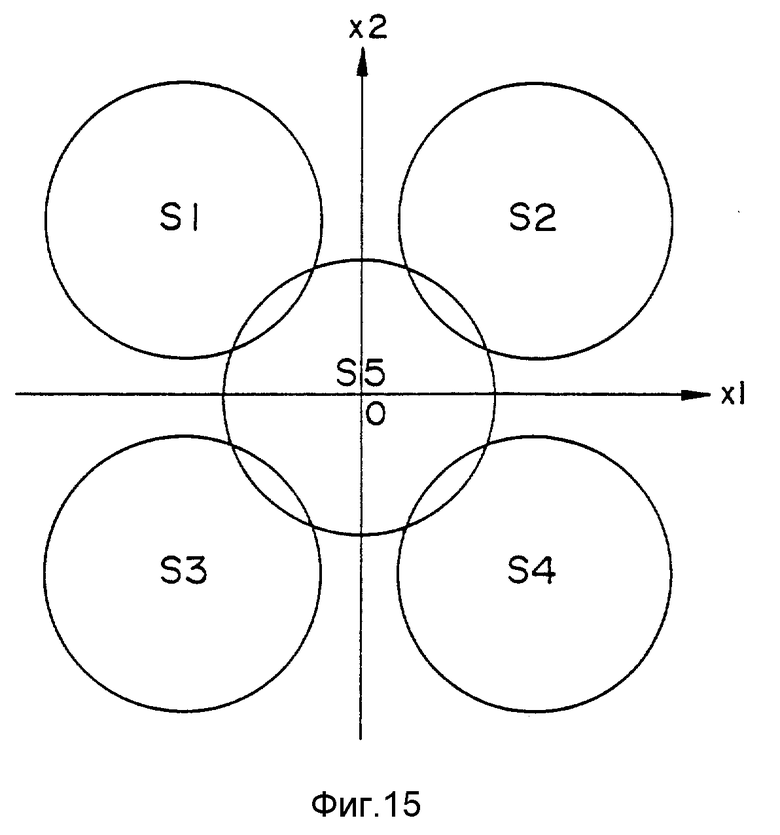
Точнее, эти правила устанавливаются таким образом, что коэффициенты S1 oC S4 становятся доминантой в квадрантах с первого по четвертый в плоскости прямоугольных координат, в которой X1 берется вдоль горизонтальной оси, а X2 вдоль вертикальной оси, как показано на фиг. 15, при этом коэффициент S5 становится доминантой вблизи от начала системы координат. Устанавливаются зоны, в которых оперативно действует одно из пяти управляющих устройств 131 - 135, причем эти устройства управляют одним управляемым объектом 150 посредством разделения ролей.
Результаты разъяснения в соответствии с вышеупомянутыми правилами в итоге относятся определенными и выдается решение в отношении коэффициентов блоков 141 - 145 коэффициентов. В этом время предпочтительно, чтобы сумма пяти коэффициентов была отрегулирована и равнялась 1. Эта регулировка может быть осуществлена блоком 153 установки коэффициентов.
В описанным выше варианте осуществления представлены функции весьма малого числа типов, которые показаны на фиг. 12 и 13, причем это сделано для упрощения описания. Можно не говорить о том, что может быть довольно большое число типов функций. Но это повлекло бы за собой некоторое усложнение правил, представленных на фиг. 14a - 14e.
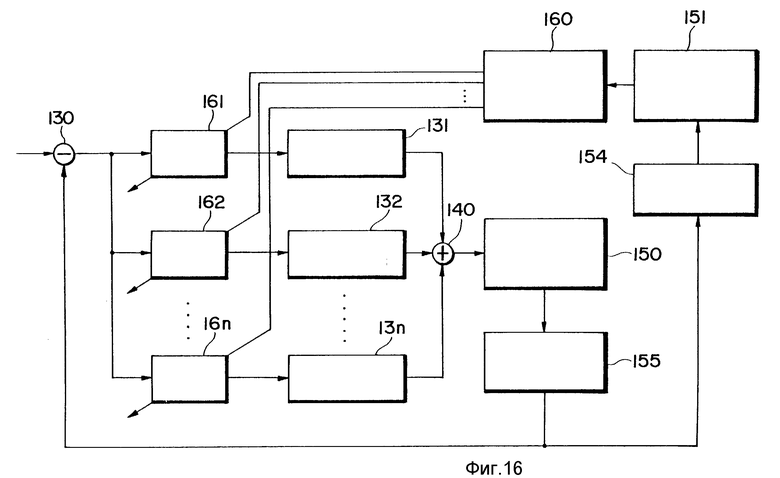
На фиг. 16 представлен другой вариант осуществления. На фиг. 16 части, идентичные тем, которые представлены на фиг. 11, обозначены теми же символами и их описание исключено.
В этом варианте осуществления создано n количество управляющих устройств 131 - 13n, а выходы от этих устройств подаются к сумматору 140. Сигнал смещения, выдаваемый вычитателем 130, подается к управляющим устройствам 131 - 13n через соответствующие переключающие цепи 161 - 16n, созданные для соответствующего одного из управляющих устройств 131 - 13n. На основании результатов разъяснения посредством цепи 151 разъяснения неопределенности переключающие цепи 161 - 16n, образующие блок принятия решения, контролируются цепью 160 замены таким образом, что одна из них включается, а все остальные выключаются. Соответственно, выходной сигнал одного из управляющих устройств подается к управляющему объекту в виде регулируемой переменной через сумматор 140.
Разъяснение неопределенности выполняется таким же образом, как описано применительно к фиг. 12-14e. Включается переключающая цепь, соответствующая коэффициенту, имеющему максимальную величину в результате разъяснения.
На фиг. 16 блоки коэффициентов, показанные на фиг.11, могут быть использованы вместо переключающей цепи. И, наоборот, блоки коэффициентов согласно фиг. 11 могут быть заменены переключающими цепями.
Вместо получения коэффициентов блока коэффициентов равным 0 или выключения переключающей цепи, либо в дополнение к этому, управляющее устройство, в котором управляющий сигнал не используется для управления управляемым объектом, может быть установлено в нерабочее состояние.
Предлагаемая группа изобретений относится к системам с адаптивным нечетким управлением и может быть использована при автоматическом контроле и регулировании температуры, скорости и пр., в которых управляющие правила могут быть заменены в течение выполнения нечеткой оценки. Приведено описание конструктивного выполнения вариантов устройства для формирования нечеткого управляющего воздействия с использованием блока нечеткой логики, а также системы управления, использующей блок нечеткой логики для оценки выходного параметра объекта управления. 7 с. и 2 з.п.ф-лы, 16 ил.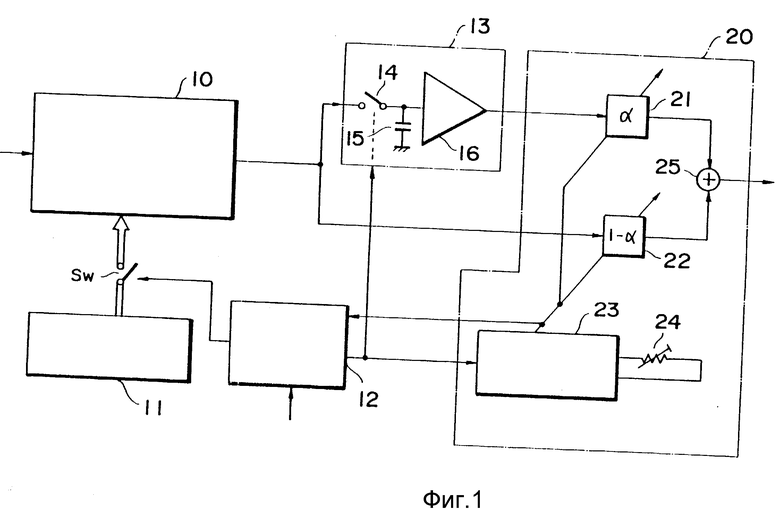
| Automatica, May 1977, v | |||
| Насос | 1917 |
|
SU13A1 |
| Стеклографический печатный станок с ножной педалью | 1922 |
|
SU236A1 |
| Автоматика и телемеханика, 1992, N 11, с | |||
| Переносная печь для варки пищи и отопления в окопах, походных помещениях и т.п. | 1921 |
|
SU3A1 |

