Заявляемые изобретения относятся к области автоматизированного управления сложными информационными устройствами, использующими пропорционально-интегрально-дифференциальные законы (ПИД-законы) регулирования, и могут найти применение в радиотехнических системах с хаотической динамикой реализации своих целевых функций в условиях интенсивного информационного возмущения.
В настоящее время значительный практический интерес вызывает построение систем автоматического управления в аспекте реализации обеспечения надежного функционирования современных инфокоммуникационных систем (ИС). Это обусловлено, прежде всего, тем, что современные инфокоммуникационные комплексы превратились в сложные информационные системы, в подавляющем большинстве случаев с хаотической динамикой реализации своих целевых функций. При этом функционирование в общей среде приема-передачи, наличие существенно влияющих на эффективность потенциально опасных кодовых или аналоговых последовательностей (в цифровой или речевой форме) и регулярный переход в режим конфликтного функционирования как отдельных элементов, так и всей ИС требуют совершенствования функций управления - как алгоритмами управления включенных в их состав объектов, так и собственно алгоритмами регулирования физических параметров ИС, таких как ток, напряжение, частота и др.
Содержание способов адаптивного регулирования сводится к тому, что система-регулятор каким-либо образом отслеживает и диагностирует как внутреннее состояние объекта управления, так и внешние возмущения, поступающие на объект, и приспосабливает процесс регулирования под изменяющееся состояние объекта. Следует отметить, что при этом необходимо знать начальные параметры объекта управления, характерные для каждого из объектов управления. Если параметры объекта не меняются, то все параметры ПИД-регулятора остаются неизменными. Если же параметры объекта поменялись, то адаптивный регулятор за несколько итераций находит новые оптимальные параметры и заменяет старые параметры на новые. Таким образом, обеспечивается постоянство оптимальных настроек ПИД-регулятора под изменяющиеся параметры объекта регулирования. Система, работающая по такому способу регулирования, называется самонастраивающимся адаптивным ПИД-регулятором. Для систем с хаотической динамикой и при повышенных требованиях к качеству регулирования необходима разработка системы с индивидуальной структурой, основанной на физике процессов, протекающих в объекте управления.
Известен способ пропорционального управления, основанный на изменении управляющего сигнала в зависимости от разности между истинным сигналом и заданной величиной, описанный в [1]. Общая формула вычисления величины выходного сигнала способа пропорционального управления следующая [1, с.145]:

где G - усиление;
e - величина ошибки (разница между заданной и истинной величинами) в системе пропорционального управления.
Недостаток способа пропорционального управления состоит в том, что при изменении управляющего сигнала в зависимости от разности между заданной и измеряемой величинами отсутствует механизм подстройки к внезапно меняющимся внешним условиям.
Известен способ пропорционально-интегрально-дифференциального управления (ПИД-управления), при этом в систему добавляются дополнительные входы, несущие информацию о предыдущем состоянии системы, описанный в [1, с.148]. Общая формула вычисления величины выходного сигнала способа ПИД-управления следующая:

где G - усиление;
е - ошибка управления, то есть разность между требуемой и действительной величинами;
I - прибавляемая величина интеграла ошибки;
D - прибавляемая величина производной ошибки.
От способа пропорционального управления способ ПИД-управления отличается дополнительными вычислениями интеграла и производной (разность между состояниями в соседних временных интервалах). Поскольку эти параметры зависят от времени, добавление операций дифференцирования и интегрирования в алгоритм управления позволяет улучшить некоторые параметры. Пропорциональная часть (G*e) заставляет выходной сигнал следовать за входным (установить заданную величину). Дифференциальная часть 
Способ ПИД-управления требует определенной подстройки системы, т.е. выбора параметров (коэффициентов) всех трех величин. На первом этапе процедура подстройки системы ПИД-управления заключается в том, чтобы установить усиление (G) достаточно большим для обеспечения высокой скорости работы системы. Затем величина производной (D) устанавливается достаточно большой для уменьшения возможного избыточного усиления и колебаний. Наконец, интегральный коэффициент (I) также делается большим для устранения ошибки установившегося режима. Чаще всего коэффициенты подбираются экспериментально.
Способ работы системы, реализующей способ управления по формуле (2) и описанный в [1, с.156], называют методом Циглера/Николса. Алгоритм работы метода состоит из следующих шагов:
1. Сначала отключают цепи интегрирующего и дифференцирующего сигналов, что превращает систему управления в систему с пропорциональным регулированием.
2. Увеличивают усиление до тех пор, пока на выходе не установятся незначительные либо затухающие колебания. Такой уровень усиления обозначается (К).
3. Измеряют период колебаний (Р).
4. Далее следуют проверки для установки коэффициентов пропорционального усиления (G), а также коэффициентов усиления сигналов интеграла и производной в соответствии с экспериментальными соотношениями. Если система управления только пропорциональная, то устанавливают G=0.5 К. Если система пропорционально-интегрирующая, то устанавливают G=0.45 К, I=1.2/Р. Если система ПИД-управления, то устанавливают G=0.6 К, I=2/Р, D=Р/8.
Очевидно, что данный способ подстройки систем с ПИД-регулированием требует дополнительной коррекции для оптимизации работы. Возникающие при этом недостатки перечислены ниже:
- наличие трудностей, связанных с измерениями периода колебаний;
- наличие проблемы насыщения - можно рассчитать такой сигнал на выходе, который реальной электромеханической системой никогда не будет достигнут;
- наличие неопределенности управления из-за временных задержек, происходящих от подачи сигнала управления до реакции датчика;
- наличие резких изменений сигнала, которые не поддаются регулированию.
Наиболее близким по технической сущности к предлагаемому способу является способ управления обобщенным дискретным ПИД-регулятором, описанный в [2, с.261-272], позволяющий в зависимости от входного набора параметров получать те или иные структуры цифрового управления, принятый за прототип.
Способ-прототип заключается в следующих действиях.
Входная переменная u(kt) дискретного регулятора описывается уравнением, которое удобно представить тремя составляющими - контуром упреждения по опорному значению uF1, контуром обратной связи по выходу процесса uFB и контуром упреждения по измеренному возмущению uF2:

Возмущение w(kt) влияет на процесс в соответствии с передаточной функцией, зависящей от характерных особенностей регулируемого процесса. Оператор обратной связи 

Для вычисления параметров регулятора наиболее удобно представить процесс в виде:

Первый член определяет передаточный оператор от опорного значения uC(kt) к выходу процесса y(kt) через контуры упреждения и обратной связи, а второй - передаточный оператор от возмущения w(kt) к выходу y(kt) через контур обратной связи.
Параметры полиномов А и В зависят от вида процесса и поэтому считаются постоянными, а параметры полиномов R, S, Т можно настраивать. Преобразование параметров регулятора в коэффициенты полиномов может быть представлено следующим образом:


где N - нормирующий коэффициент для постоянной времени;
К - параметр усиления регулятора;
Ti - постоянная времени интегрирования;
Td - постоянная времени дифференцирования;
q - оператор сохранения предыдущего значения сигнала.
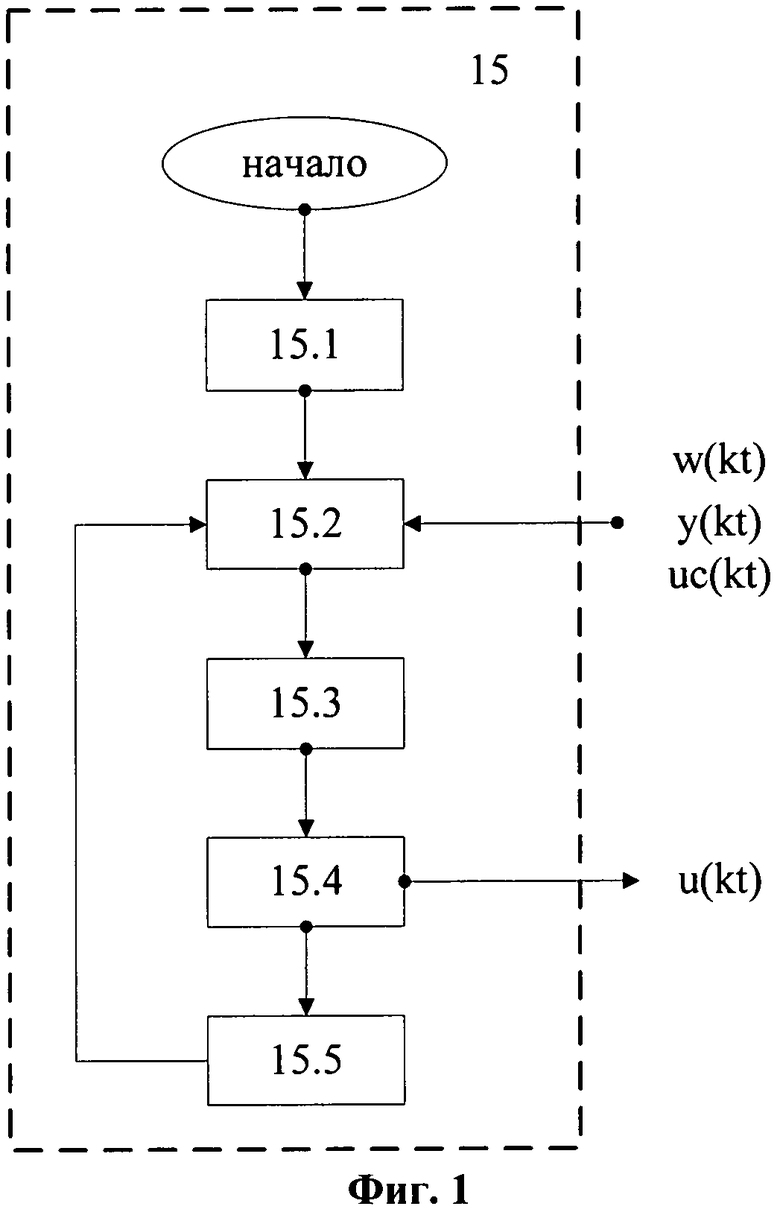
Алгоритм функционирования дискретного обощенного регулятора 15, описанный в [2, с.272], приведен на фиг.1 в виде блок-схемы. При включении в блоке 15.1 происходит инициализация векторов состояния и расчет постоянных коэффициентов регулятора. В момент времени (kt) в блоке 15.2 считываются значения сигналов uc(kt), w(kt), y(kt). Затем в блоке 15.3 происходит вычисление управляющего сигнала u(kt) на основе значений предшествующих выборок по формуле:

где Т, S, R вычисляются на основе постоянных коэффициентов - параметров регулятора.
Обновление векторов состояния uc(kt), u(kt), y(kt) и выдача значения u(kt) происходит в блоке 15.4.
Как только вычислен сигнал управления, в блоке 15.5 происходит вычисление нового значения выборки для использования на следующем шаге.
Однако в способе-прототипе можно отметить следующие недостатки:
- при переключении режимов работы параметры управляющего сигнала и регулятора должны устанавливаться вручную;
- так как все передаточные функции определяются характеристиками процесса, упреждающий сигнал полностью определен моделью системы. Если модель неточна, упреждающий сигнал не может полностью скомпенсировать влияние возмущения;
- не учитываются особенности информационных систем.
Назначение системы, реализующей способ управления по закону ПИД-регулирования, состоит в управлении некоторой физической величиной (например, напряжением, частотой или температурой объекта). В отличие от наиболее распространенных аналоговых систем, цифровая система управления может воспроизвести на выходе более сложную функцию и сформировать сигнал, являющийся не только функцией входа и выхода, но и предыдущих состояний входа и выхода, коэффициентов временных изменений, состояния нагрузки и т.п. Практическая реализация данного способа управления требует использования современной электронной базы, включающей микропроцессоры, логические устройства, цифровые интерфейсы.
Известно устройство автоматического регулирования «Супервизорный пропорционально-интегрально-дифференциальный регулятор», описанное в [3], позволяющее одновременно с высоким качеством отрабатывать и задающее и возмущающее воздействия и обеспечивающее существенное улучшение динамических характеристик систем регулирования технологических параметров при отработке возмущений по различным каналам.
Недостатком регулятора [3] является то, что динамические блоки, обеспечивающие супервизорную часть регулятора, являются постоянными величинами и заранее подбираются для компенсации возмущающего воздействия в зависимости от регулируемого параметра, что ограничивает область применения подобных регуляторов.
Известно устройство автоматического управления объектами с неизвестными параметрами и неизвестным ограниченным внешним возмущением «Самонастраивающийся ПИД-регулятор», описанное в [4], обеспечивающее работу системы при больших изменениях параметров объекта при переходе с режима на режим.
Недостатком регулятора [4] является недостаточная адаптивность к нелинейным процессам, происходящим в системе с хаотической динамикой, вследствие реализации устройства на промышленном контроллере. В этом случае настройка ПИД-регулятора происходит по заданным заранее формулам для определенных характеристик объекта и не является оптимальной.
Известна классическая система автоматического регулирования, реализующая способ управления по формуле (2), описанная в [1, с.149-150]. В системе ПИД-управления добавлен дополнительный вход, несущий информацию о предыдущем состоянии системы. Разница между заданной и измеряемой величинами усиливается. Производная и интеграл усиленной разности суммируются с усиленным сигналом ошибки, формируя сигнал на выходе.
Однако в системе [1] можно отметить следующие недостатки:
- требует дополнительной коррекции параметров подстройки для оптимизации работы;
- отсутствие возможности регулирования резких изменений сигнала.
Система, принятая за прототип и реализующая способ управления по формулам (3)-(7), описывается в [2, с.265].
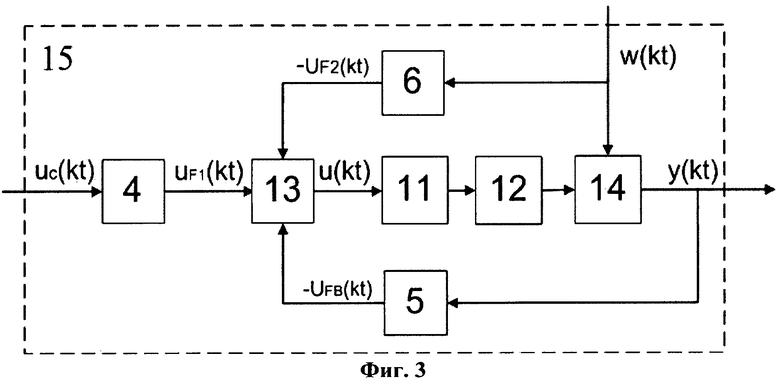
Структурно-функциональная схема системы представлена на фиг.3, где приняты следующие обозначения:
4 - пропорциональный блок (ПБ);
5 - интегрирующий блок (ИБ);
6 - дифференцирующий блок (ДБ);
11 - исполнительный блок (ИсБ);
12 - управляемый объект (УО);
13 - первый сумматор (С1);
14 - второй сумматор (С2).
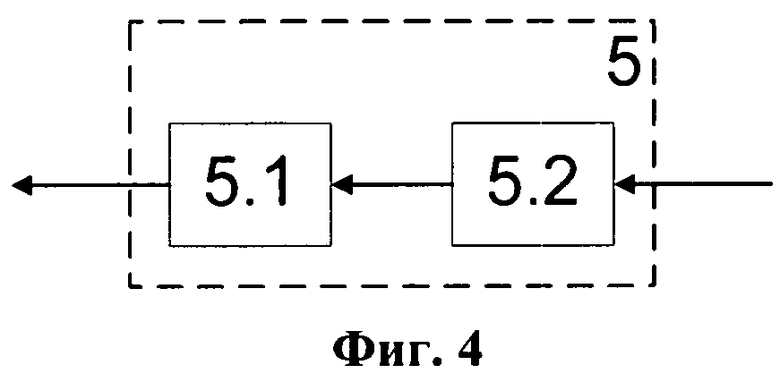
Функциональная схема интегрирующего блока 5 представлена на фиг.4, где приняты следующие обозначения:
5.1 - интегрирующий регулятор (HP);
5.2 - датчик обратной связи (ДОС).
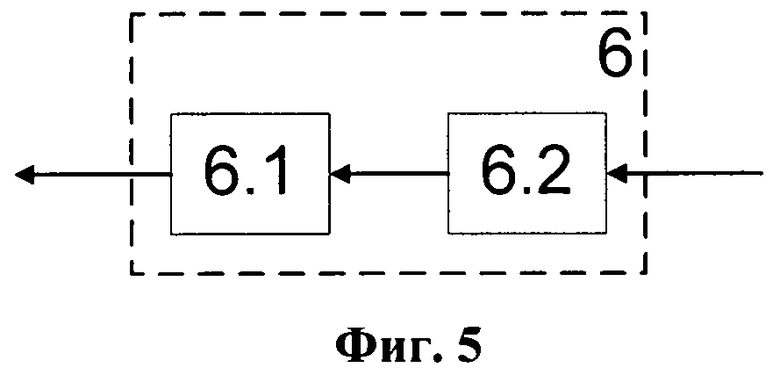
Функциональная схема дифференцирующего блока 6 представлена на фиг.5, где приняты следующие обозначения:
6.1 - дифференцирующий регулятор (ДР);
6.2 - датчик возмущений (ДВ).
Система-прототип содержит пропорциональный блок 4, осуществляющий упреждение по опорному значению, выход которого соединен с первым входом первого сумматора 13; интегрирующий блок 5, осуществляющий обратную связь, выход которого соединен с третьим входом первого сумматора 13; дифференцирующий блок 6, осуществляющий упреждение по возмущению, выход которого соединен со вторым входом первого сумматора 13, выход которого соединен с входом исполнительного блока 11, реализующего совокупную коррекцию входной величиныи своим выходом соединенного с входом управляемого объекта 12, выход которого соединен с первым входом второго сумматора 14, выход которого соединен с входом интегрирующего блока 5.
При включении в блоках 4, 5, 6 происходит установка значений постоянных коэффициентов регулятора. В следующий момент времени в блоке 4 фиксируется значение сигнала uc(kt), в блоке 5 фиксируется значение сигнала y(kt), в блоке 6 и сумматоре 14 фиксируется значение сигнала w(kt). Состояние зафиксированных сигналов запоминается для последующего шага вычислений на следующем временном интервале. Далее преобразованные на основе постоянных коэффициентов - параметров регулятора сигналы поступают на вход первого сумматора 13, в котором вычисляется управляющий сигнал u(kt) на основе значений предшествующих выборок по формуле (7). Далее с выхода первого сумматора 13 значение сигнала u(kt) поступает на вход блока 11 с последующей подачей преобразованного в соответствии с системными требованиями сигнала на блок 12, с выхода которого сигнал поступает на вход блока 14. Затем с выхода блока 14 сигнал поступает на вход блока 5, что обеспечивает компенсацию медленно изменяющихся погрешностей управления.
Далее действия повторяются, начиная с этапа фиксирования значений сигналов uc(kt), w(kt), y(kt).
Однако в системе-прототипе можно отметить следующие недостатки:
- при переключении режимов работы параметры управляющего сигнала и регулятора должны устанавливаться вручную;
- так как все передаточные функции определяются характеристиками процесса, упреждающий сигнал полностью определен моделью системы. Если используется недостаточно точная модель, упреждающий сигнал не может полностью скомпенсировать влияние возмущения.
Общим недостатком вышеописанных систем, реализующих управление по ПИД-закону, являются плохие показатели качества при управлении нелинейными и сложными системами, а также при отсутствии достаточной информации об объекте управления.
Задача, на решение которой направлены заявляемые изобретения, заключается в улучшении характеристик регуляторов в условиях работы со значительным уровнем априорной неопределенности параметров с целью обеспечения дополнительной защиты системы в условиях специальных воздействий и преднамеренных помех.
Достигаемый технический результат - улучшение динамики процессов регулирования и расширение функциональных возможностей, заключающееся в следующем:
- обеспечение высокой точности и качества управления регулятора, в том числе при измерении очень малых величин или величин в очень широком динамическом диапазоне;
- предоставление возможности проведения многократного корректирования управляющих параметров;
- предоставление возможности проведения оперативной коррекции наборов значений констант матриц принятия решений, что повышает общую интеллектуальность управления динамической системой;
- улучшение динамики процессов регулирования вследствие реализации метода последовательного (каскадного) соединения кластерных блоков;
- повышение надежности в плане снижения влияния неучтенных факторов инфокоммуникационной среды на устойчивость работы открытой динамической системы с ярко выраженной колебательной динамикой или с параметрами, быстро меняющимися во времени;
- предоставление возможности выбора желательных ветвлений динамических процессов и создания рациональной структуры путем управления начальными данными и выбора из ансамбля состояний наиболее адекватных, допускаемых системой.
Для решения поставленной задачи заявляется способ адаптивного управления на основе закона ПИД-регулирования, заключающийся в следующих действиях:
используя априорные значения параметров конфигурации управляемой системы (УС) для заданных условий эксплуатации УС, определяют допустимые уровни критичности отклонений соответствующих параметров конфигурации УС в виде логических функций, заданных на соответствующих множествах отклонений значений параметров конфигурации УС, согласно возможным уровням отклонений параметров входного сигнала от соответствующих значений матрицы принятия решений;
полученные значения допустимых уровней критичности отклонений параметров конфигурации УС используют для установки однозначного соответствия между параметром конфигурации УС и уровнем критичности его отклонения;
по значениям матрицы принятия решений вычисляют погрешности отклонений значений параметров конфигурации УС;
если вычисленные погрешности отклонений значений параметров конфигурации УС соответствуют допустимым уровням критичности отклонений параметров конфигурации УС, сохраняют предыдущие значения параметров конфигурации УС и проводят рефакторинг начального содержания множества значений матрицы принятия решений;
если вычисленные погрешности отклонений значений параметров конфигурации УС не соответствуют допустимым уровням критичности отклонений параметров конфигурации УС, запоминают это событие и вычисленные погрешности отклонений значений параметров конфигурации УС;
далее осуществляют адаптацию значений параметров конфигурации УС к выявленным отклонениям функционирования УС путем назначения управляющего воздействия на УС на основе выбора значений из матрицы принятия решений, при этом устанавливают соответствие между текущими и допустимыми значениями параметров конфигурации УС;
если выявлены недостающие и/или некорректно заданные значения параметров конфигурации УС, проводят рефакторинг содержания множества значений матрицы принятия решений по каждому из параметров конфигурации УС для заданных условий эксплуатации УС путем добавления выявленных недостающих значений и/или изменения некорректных значений матрицы принятия решений;
далее сохраняют предыдущие значения параметров конфигурации УС, назначают управляющее воздействие на УС и проводят рефакторинг содержания множества значений матрицы принятия решений путем замены предыдущих значений параметров конфигурации УС текущими значениями параметров конфигурации УС;
повторяют вышеописанные действия, начиная с этапа определения уровня критичности отклонений параметров конфигурации УС для заданных условий эксплуатации УС.
Также для решения поставленной задачи заявляется система адаптивного управления по ПИД-закону, содержащая коммутационные матрицы входов (КМвх) и выходов (КМвых), последовательно соединенные решающее устройство, исполнительный блок и управляемый объект, выход которого, являющийся выходом устройства, соединен со вторым сигнальным входом КМвх, первый сигнальный вход которой является входом регулируемого сигнала; контроллер функциональной логики (КФЛ), пропорциональный блок и интегрирующе-дифференцирующий блок (ИДБ), включающий К интегрирующе-дифференцирующих кластеров (ИДК), каждый из которых содержит по интегрирующему и дифференцирующему блоку с собственными нормирующими коэффициентами, причем К пар сигнальных входов ИДБ являются парами сигнальных входов соответствующих ИДК, где первый сигнальный вход ИДК является сигнальным входом соответствующего интегрирующего блока, а второй сигнальный вход ИДК является сигнальным входом соответствующего дифференцирующего блока; К пар выходов ИДБ являются парами выходов соответствующих ИДК, из которых первый выход является выходом соответствующего интегрирующего блока, а второй выход является выходом соответствующего дифференцирующего блока; первый выход КМвх соединен с сигнальным входом пропорционального блока, выход которого соединен с первым сигнальным входом КМвых, первый выход которой соединен первым с сигнальным входом решающего устройства, остальные К пар сигнальных входов которого соединены с соответствующими К парами выходов КМвых; остальные К пар выходов КМвх соединены с соответствующими К парами сигнальных входов ИДБ, К пар выходов которого соединены с соответствующими К парами сигнальных входов КМвых, группа выходов которой посредством сигнальной шины соединена с группой сигнальных входов КМвх; первый выход КФЛ соединен с управляющим входом КМвх, второй выход - с управляющим входом пропорционального блока, третий выход - с управляющими входами каждого из К интегрирующих и К дифференцирующих блоков; четвертый выход - с управляющим входом КМвых, а остальные выходы КФЛ соединены с соответствующими управляющими входами решающего устройства, информационные выходы которого соединены с соответствующими информационными входами КФЛ.
До описания реализации заявляемых изобретений необходимо дать следующие пояснения.
Термином «кластерный анализ» принято обозначать совокупность методов, подходов и процедур, разработанных для решения проблемы формирования однородных компонент в произвольной проблемной области и предназначенных для нахождения некоторого разбиения исследуемой совокупности на подмножества относительно сходных, похожих между собой объектов [5]. Необходимость анализа и использования больших объемов объективной и субъективной информации, связанных с неформализуемыми и плохо формализуемыми задачами различной физической природы, потребовала интенсивного развития и реализации новых способов применения этих методов. Методы кластерного анализа не используют априорных предположений о вероятностной природе исходной информации и руководствуются только эвристическими соображениями о характере и особенностях исследуемой совокупности данных. При этом объекты, относимые к одному кластеру, должны иметь большее сходство между собой, чем с объектами из других кластеров.
Для систем управления сложными информационными объектами требуется определить еще и информационную структуру системы, т.е. число и местоположение дополнительных каналов связи объекта с управляющим устройством, поскольку подобные системы обычно строятся как многоконтурные и с компенсацией возмущений.
Решение задачи адаптивного управления осуществляется путем выполнения нижеследующих действий.
Предварительно заполняется матрица принятия решений в соответствии с требуемыми параметрами УС. Для этого выбираются диапазоны входных и выходных сигналов, форма функций принадлежности искомых параметров, правила и механизм логического вывода, диапазоны масштабных множителей.
Затем устанавливаются значения начальных приближений коэффициентов К, Ti, Td. в соответствии с формулами (5), (6). Это можно сделать либо методом Циглера/Николса [1, с.156], либо исходя из требований конкретной задачи.
Далее формулируется критериальная функция, необходимая для поиска оптимальных значений параметров настройки методами оптимизации. Оптимизация критериальной функции может быть выполнена с помощью генетических алгоритмов, методов теории нечетких множеств или использования принципов обучения нейронной сети [13-18]. Оптимизацию нечетких параметров настройки можно осуществить, например, в результате моделирования процесса управления заданными параметрами [13-18].
После оптимизации определяют ограничения на диапазон изменения параметров конфигурации функций принадлежности. В качестве функций принадлежности можно использовать кусочно-заданные функции, описывающие равнобедренные треугольники.
Полученные данные сохраняют в таблице констант в матрице принятия решений. На этом этап предварительного определения параметров системы заканчивается.
Используя априорные значения параметров конфигурации управляемой системы (УС) для заданных условий эксплуатации УС, определяют допустимые уровни критичности отклонений соответствующих параметров конфигурации УС в виде логических функций, заданных на соответствующих множествах отклонений значений параметров конфигурации УС, согласно возможным уровням отклонений параметров входного сигнала от соответствующих значений (констант), хранящихся в матрице принятия решений.
Полученные значения допустимых уровней критичности отклонений параметров конфигурации УС используют для установки однозначного соответствия между параметром конфигурации УС и уровнем критичности его отклонения.
Затем по значениям матрицы принятия решений вычисляют погрешности отклонений значений параметров конфигурации УС.
Если вычисленные погрешности отклонений значений параметров конфигурации УС соответствуют допустимым уровням критичности отклонений параметров конфигурации УС, это означает, что не выявлено отклонение параметров конфигурации и адаптации управляемой системе не требуется. В этом случае сохраняют предыдущие значения параметров конфигурации УС (фиксируют конфигурацию УС, не меняя управляющего воздействия).
Далее сохраняют предыдущие значения параметров системы и проводят рефакторинг начального содержания множества значений матрицы принятия решений, основанный на долговременном анализе (рефакторингом называют методику улучшения структуры или последовательности данных без изменения функциональности путем добавления, замены или удаления объектов [6]).
Если вычисленные погрешности отклонений значений параметров конфигурации УС не соответствуют допустимым уровням критичности отклонений параметров конфигурации УС, это означает, что выявлено отклонение от заданных условий функционирования и необходима адаптация УС. В этом случае запоминают факт отклонения и вычисленные погрешности отклонений значений параметров конфигурации УС.
Далее осуществляют адаптацию значений параметров конфигурации УС к выявленным отклонениям функционирования УС путем назначения управляющего воздействия на УС на основе выбора значений из матрицы принятия решений. При этом устанавливают соответствие между текущими и допустимыми значениями параметров конфигурации УС, то есть по каждому из параметров сопоставляются текущие значения и значения из возможного ряда допустимых значений параметров УС.
Если выявлены недостающие и/или некорректно заданные значения параметров конфигурации УС, проводят рефакторинг содержания множества значений матрицы принятия решений по каждому из параметров конфигурации УС для заданных условий эксплуатации УС путем добавления выявленных ранее недостающих значений и/или изменения некорректных значений матрицы принятия решений.
Далее сохраняют предыдущие значения параметров конфигурации УС, назначают управляющее воздействие на УС и проводят рефакторинг содержания множества значений матрицы принятия решений, основанный на долговременном анализе, в соответствии с условными правилами заданного алгоритма путем замены предыдущих значений параметров конфигурации УС текущими значениями параметров конфигурации УС.
Затем повторяют вышеописанные действия, начиная с этапа определения уровня критичности отклонений параметров конфигурации УС от заданной величины для заданных условий эксплуатации УС.
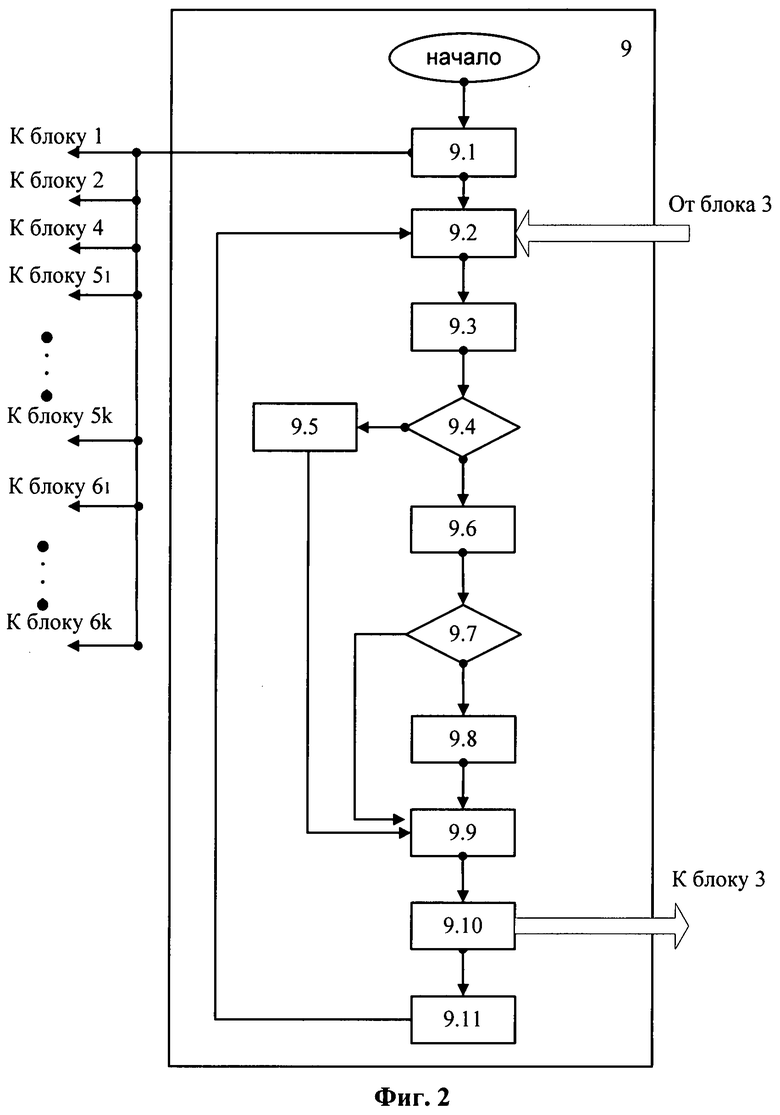
Заявляемый способ поясняется с помощью фиг.2, где представлен алгоритм адаптивного управления по ПИД-закону, реализуемый контроллером функциональной логики (КФЛ) 9 и поддерживаемый архитектурой заявляемой системы, структурно-функциональная схема которой приведена на фиг.6, где приняты следующие обозначения:
1 - коммутационная матрица входов (КМвх);
2 - коммутационная матрица выходов (КМвых);
3 - решающее устройство (РУ);
4 - пропорциональный блок (ПБ);
51…5к - интегрирующие блоки (ИБ);
61…6к - дифференцирующие блоки (ДБ);
71…7к - интегрирующе-дифференцирующие кластеры (ИДК);
8 - сигнальная шина (СШ);
9 - контроллер функциональной логики (КФЛ);
10 - интегрирующе-дифференцирующий блок (ИДБ);
11 - исполнительный блок (ИсБ);
12 - управляемый объект (УО).
Заявляемая система содержит коммутационную матрицу входов (КМвх) 1, первый выход которой соединен с сигнальным входом пропорционального блока (ПБ) 4, выход которого соединен с первым сигнальным входом коммутационной матрицы выходов (КМвых) 2, первый выход которой соединен с первым сигнальным входом решающего устройства (РУ) 3.
Интегрирующе-дифференцирующий блок (ИДБ) 10 заявляемой системы содержит К интегрирующе-дифференцирующих кластеров (ИДК) 71…7к, каждый из которых содержит один из К интегрирующих блоков 51…5к с собственным нормирующим коэффициентом И1…Ик и один из К дифференцирующих блоков 61…6к с собственным нормирующим коэффициентом Д1…Дк соответственно.
Причем в ИДБ 10 имеется К пар сигнальных входов (т.е. 2К сигнальных входов), которые в то же время являются парами сигнальных входов соответствующих ИДК 71…7к, где первый сигнальный вход ИДК 7 является сигнальным входом соответствующего ИБ 5, а второй сигнальный вход ИДК 7 является сигнальным входом соответствующего ДБ 6. Кроме того, в ИДБ 10 имеется К пар выходов (т.е. 2К выходов), которые в то же время являются парами выходов соответствующих ИДК 71…7к, где первый выход ИДК 7 является выходом соответствующего ИБ 5, а второй выход ИДК 7 является выходом соответствующего ДБ 6.
При этом К пар сигнальных входов ИДБ 10 соединены соответственно с К парами выходов КМвх 1, а К пар выходов ИДБ 10 соединены с соответствующими К парами сигнальных входов КМвых 2, К пар выходов которой соединены с соответствующими К парами сигнальных входов решающего устройства (РУ) 3, выход которого через исполнительный блок (ИБ) 11 соединен со входом управляемого объекта (УО) 12, выход которого, являющийся выходом устройства, соединен со вторым сигнальным входом КМвх 1, первый вход которого является входом регулируемого сигнала.
Также заявляемая система содержит контроллер функциональной логики (КФЛ) 9, первый выход которого соединен с управляющим входом КМвх 1, второй выход - с управляющим входом ПБ 4, третий выход - с управляющими входами каждого из К интегрирующих 51…5к и К дифференцирующих 61…6к блоков; четвертый выход - с управляющим входом КМвых 2, а остальные выходы КФЛ 9 соединены с соответствующими управляющими входами РУ 3, информационные выходы которого соединены с соответствующими информационными входами КФЛ 9.
Кроме того, группа выходов КМвых 2 посредством сигнальной шины (СШ) 8 соединена с группой сигнальных входов КМвх 1.
В общем случае ПИД-управление представляет собой нелинейное преобразование:

где λi,λij - весовые коэффициенты при входных переменных ui, uj;
ui=ui(kt,Λ), ui(uj)=ui(kt,uj(kt,Λ)) - векторы значений управляющего сигнала, которые определяются по формуле (7);
Λ=f(uF1,uFB,uF2) - функция коэффициентов, вычисляемая на основе параметров регулятора.
Как было указано выше, алгоритм адаптивного управления по ПИД-закону реализуется блоком КФЛ 9 (см. фиг.2).
При включении блок 9.1 инициализирует значения коэффициентов регуляторов И1…Ик и Д1…Дк путем подачи управляющих сигналов на управляющие входы ИД 10, а также производит установку параметров ПБ 4 и инициализацию структуры КМвх 1 и КМвых 2 путем подачи на их управляющие входы управляющих сигналов.
Далее в блоке 9.2 производится считывание значений входных сигналов из РУ 3, затем для каждого параметра конфигурации УС происходит определение соответствующего уровня критичности его отклонения в виде логической функции, заданной на множестве ряда отклонений параметров конфигурации УС согласно возможным уровням отклонения входного сигнала от заданной величины, сохраняемым в таблице констант в матрице принятия решений.
Затем в блоке 9.3 определяют допустимость отклонения параметров конфигурации УС по константам матриц принятия решений.
В блоке 9.4 происходит проверка на выявление отклонений параметров конфигурации УС и выявление необходимости корректирующих воздействий на УС.
В случае отрицательного результата проверки производится переход к блоку 9.5, где фиксируют конфигурацию УС, не меняя управляющего воздействия, затем переходят к блоку 9.9.
В случае положительного результата проверки производится переход к блоку 9.6, где констатируют факт отклонения и назначают управляющее воздействие на основе выбора констант из матриц принятия решений с целью адаптации УС к выявленным отклонениям функционирования, при этом по каждому из параметров сопоставляются текущие значения и значения из возможного ряда допустимых значений параметров УС, затем переходят к блоку 9.7.
В блоке 9.7 происходит проверка на выявление недостающих и/или некорректно заданных элементов из множества ряда параметров конфигурации УС.
Если выявляются недостающие и/или некорректно заданные элементы, происходит переход к блоку 9.8, где проводится рефакторинг (реструктуризация) начального содержания множества по каждому из нарушенных условий в соответствии с известными конфигурационными требованиями путем добавления выявленных на предыдущем шаге недостающих значений и/или изменения некорректных.
Если не выявляются недостающие и/или некорректно заданные элементы, происходит переход к блоку 9.9, где сохраняют предыдущие значения параметров УС.
Затем в блоке 9.10 производят расчет управляющих сигналов по всем контурам регулирования, определяют и выдают новые значения на РУ 3. Конкретные коэффициенты расчетов определяются характером регулируемой УС.
Далее в блоке 9.11 проводят рефакторинг начального содержания множества, основанный на долговременном анализе в соответствии с условными правилами заданного алгоритма, путем замены предыдущих значений параметров конфигурации УС текущими значениями параметров конфигурации УС.
Затем повторяют вышеописанные действия, начиная с блока 9.2.
Система, реализующая способ адаптивного управления по ПИД-закону, работает следующим образом.
При включении КФЛ 9 инициализирует значения коэффициентов И1…Ик и Д1…Дк блоков 5 и 6, производит установку параметров ПБ 4 и инициализацию структуры соединений КМвх 1 и КМвых 2 путем подачи на управляющие входы этих блоков соответствующих управляющих сигналов.
Далее КФЛ 9 считывает начальные значения всех сигналов из информационных выходов РУ 3. Полученные данные сохраняют в КФЛ 9 для проведения последующих вычислений.
Входной регулируемый сигнал uc(kt) и выходной сигнал y(kt) поступают соответственно на первый и второй сигнальные входы КМвх 1. Кроме того, в реальных условиях система находится под воздействием сигнала возмущения w(kt).
Блоки КМвх 1 и КМвых 2 организуют необходимые для реализации целевой функции системы соединения ИДК 71…7к в единую структуру, которая обеспечивает подачу входного сигнала uc(kt) на сигнальные входы ПБ 4 и ИДБ 10.
В ПБ 4 осуществляется пропорциональное преобразование входного сигнала (упреждение по опорному значению) в соответствии с установленными ранее параметрами; затем преобразованный сигнал с выхода ПБ 4 через КМвых 2 подается на первый сигнальный вход РУ 3.
В блоке 10 осуществляется интегрально-дифференциальное преобразование входного сигнала, заключающееся в реализации обратной связи и упреждении по возмущению. Преобразованный сигнал с выходов ИДБ 10 через КМвых 2 подается на остальные сигнальные входы РУ 3.
СШ 8, образующая интерфейс между КМвых 2 и КМвх 1, позволяет организовывать последовательные соединения ИДК 71…7к (обеспечивает подключение выходов ИДК 71…7к к входам ИДК 71…7к при необходимости реализации последовательной структуры). При этом для реализации последовательной структуры через СШ 8 необходимо задействовать (2К-1) пар соединений.
При этом количество задействованных сигнальных входов и выходов блоков 1, 2, 3 и 10 определяется задачей управления и степенью неопределенности параметров управляемого объекта.
Каждый ИБ 51…5к и ДБ 61…6к имеет собственный нормирующий коэффициент, вычисляемый в КФЛ 9 на основе предшествующих значений сигнала. Упреждающее управление реализуется в ДБ 61…6к с нормирующими коэффициентами Д1…Дк. Компенсация погрешностей выходного сигнала и неучтенных возмущений реализуется в ИБ 51…5к с нормирующими коэффициентами И1…Ик.
Далее с выхода РУ 3 информация о сигналах подается на информационные входы КФЛ 9.
Согласно алгоритму, представленному на фиг.2, в КФЛ 9 производится расчет значений управляющих сигналов по всем контурам регулирования и определяются значения результирующих коэффициентов. При этом КФЛ 9, реализующий управляющую логику, использует условные правила, заложенные в программном обеспечении, для преобразования массива входных сигналов в управляющие.
Управляющие сигналы с выходов КФЛ 9 подаются на КМвх 1, КМвых 2, РУ 3, ПБ 4 и ИДБ 10, причем могут переконфигурироваться значения коэффициентов ПБ 4, И1…Ик и Д1…Дк блока 10.
Получив управляющие сигналы, КМвх 1 и КМвых 2 могут переконфигурировать структуру соединений.
Получив управляющие сигналы, РУ 3 формирует выходной сигнал u(kt). С выхода РУ 3 сигнал u(kt) поступает на вход ИсБ 11, где сигнал преобразуется в форму, понятную УО 12.
Механизм обратной связи реализуется путем подачи сигнала y(kt) с выхода УО 12 на КМв 1.
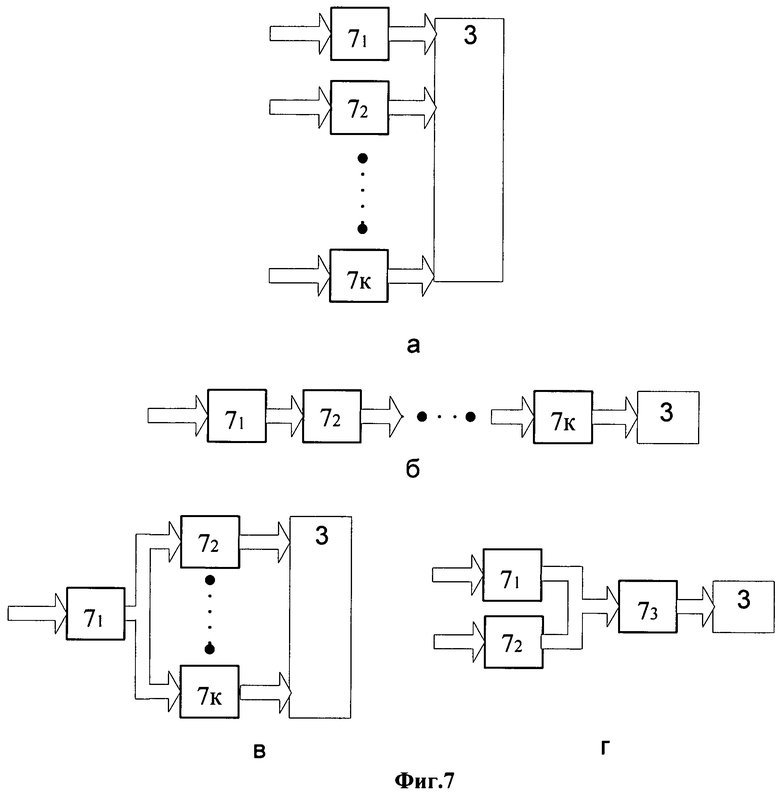
Поскольку система состоит из множества связанных между собой с помощью КМвх 1 и КМвых 2 блоков ИДК 71…7к, количество и структура взаимосвязей может варьироваться в пределах существующей задачи. Благодаря нелинейности функции (8) и большому количеству настраиваемых коэффициентов, можно получить гибкую настраиваемую структуру системы.
Очевидно, что для вырожденного случая отсутствия второго слагаемого в (8) можно получить выражение:

Для вырожденного случая отсутствия первого слагаемого в (8) можно получить выражение:

Структура межсоединений, соответствующая формуле (9), представлена на фиг.7.а - параллельная структура.
Структура межсоединений, соответствующая формуле (10), представлена на фиг.7.б - последовательная структура.
Некоторые из реализации возможных комбинированных структур предлагаемой системы показаны на фиг.7в, г.
Предлагаемую систему с несколькими контурами управления можно реализовать на следующих элементах:
- коммутационные матрицы можно реализовать на элементах ПЛИС [9] (программируемых логических интегральных схем) или цифровой логики [7, 9, 10];
- решающее устройство, пропорциональный, интегрирующий, дифференцирующий и исполнительный блоки можно реализовать на специализированных аналоговых и/или цифровых устройствах, предназначенных для управления требуемыми физическими параметрами системы (например, для управления частотой необходимы многофункциональные датчики, включая АЦП и/или ЦАП) [7, 8, 10, 11];
- контроллер функциональной логики можно сконфигурировать на основе ПЛИС фирмы «ALTERA» [9], содержащей встроенный 32-разрядный процессор на кристалле NIOS, или на основе многофункциональной высокоинтегрированной системы обработки данных, включающей высокопроизводительное х51-совместимое ядро и Flash-память [12].
Предлагаемый способ, в сущности, можно назвать нечетким ПИД-контроллером параметрического типа. Алгоритм управления состоит из нескольких иерархических уровней, включая непосредственное управление исполнительным блоком (ИсБ) через решающее устройство (РУ), накопление выборок предыдущих значений параметров системы и вычисление текущих параметров интегрирующе-дифференцирующими кластерами (ИДК), и выработку прогностического поведения системы на основе долгосрочной истории и вычисления параметров управления РУ и ИДК для данного случая.
Таким образом, можно улучшить функциональные возможности системы с помощью методов многоуровневой логики и адаптивных алгоритмов, оперируя с неполными и неточными данными. В одной системе применяются комбинации нескольких методов на основе составления базы нечетких правил и использования принципов обучения нейронной сети.
Улучшение функциональных возможностей достигается за счет того, что для осуществления адаптивного управления по ПИД-закону добавлен контроллер функциональной логики; интегрирующие и дифференцирующие блоки, каждый из которых имеет собственный нормирующий коэффициент, назначаемый контроллером функциональной логики, объединены в интегрирующе-дифференцирующие кластеры, входящие в состав ИД-блока; добавлено решающее устройство, осуществляющее передачу значений уровней регулируемых сигналов, полученных от ИД-блока, на контроллер функциональной логики для принятия решения о необходимости коррекции параметров управляемой системы. Каскадные соединения между ИД-блоками, осуществляемые с помощью коммутационных матриц, под управлением контроллера функциональной логики, дают возможность получить большое количество вариантов интерфейсных межсистемных соединений для реализации адаптивной структуры управляемой системы.
Предлагаемый способ и система будут особенно эффективными для управления системами со значительным уровнем априорной неопределенности параметров с целью обеспечения дополнительной защиты системы в условиях специальных воздействий и преднамеренных помех.
Источники информации
1. Болл Стюарт Р. Аналоговые интерфейсы микроконтроллеров. / М.: Издательский дом «Додэка-XX1», 2007. - 360 с.
2. Олссон Г. Цифровые системы автоматизации и управления / Олссон Г., Пиани Дж. // СПб.: Невский диалект, 2001. - 557 с.
3. Патент РФ на изобретение №2157558 «Супервизорный пропорционально-интегрально-дифференциальный регулятор». / Говоров А.А., Кузьмичев Е.В., Говоров С.А., 2000.
4. Патент РФ на изобретение №2419122 «Самонастраивающийся ПИД-регулятор». / Александров А.Г., Паленов М.В., 2011.
5. Мандель И.Д. Кластерный анализ. / М.: Финансы и статистика, 1988. - 176 с.
6. Фаулер М. Рефакторинг: улучшение существующего кода. / Пер. с англ. - СПб: СимволПлюс, 2003. - 432 с.
7. http://www.analog.com/ru/allProducts.html - радиоэлектронные Компоненты компании "Analog Devices".
8. http://russia.maxim-ic.com/products/ - радиоэлектронные Компоненты компании "MAXIM".
9. http://www.altera.ru/cgi-bin/go?38 - радиоэлектронные Компоненты компании "ALTERA".
10. http://www.ti.com/ww/ru/ - радиоэлектронные Компоненты компании "Texas Instruments".
11. http://www.murata.com/ - радиоэлектронные Компоненты компании "Murata Manufacturing Company, Ltd.".
12. http://www.silabs.com/products/pages/default.aspx - радиоэлектронные Компоненты компании "Silicon Labs".
13. Бесекерский В.А. Теория систем автоматического управления / В.А.Бесекерский, Е.П.Попов. - СПб.: Профессия, 2004. - 752 с.
14. Гостев В.И. Нечеткие регуляторы в системах автоматического управления. / К.: Радиоматор, 2008. - 972 с.
15. Жданов А.А. Возможности использования технологии детерминированного хаоса в системах автономного адаптивного управления / А.А.Жданов, А.Е.Устюжанин // М.: ИСП РАН, 2001 г. - С.141-179. (Труды Ин-та системного программирования).
16. Ким Д.П. Теория автоматического управления. Т.2. Многомерные, нелинейные, оптимальные и адаптивные системы: Учеб. пособие. / М.: ФИЗМАТЛИТ, 2004. - 464 с.
17. Терехов В.А. Нейросетевые системы управления. / Терехов В.А., Ефимов Д.В., Тюкин И.Ю., Антонов В.Н. // Санкт-Петербург: СПбГУ, 1999.
18. Чхартишвили А.Г. Теоретико-игровые модели информационного управления. / М.: ЗАО «ПМСОФТ», 2004. - 227 с.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство адаптивного управления | 2019 |
|
RU2707159C1 |
| СПОСОБ И УСТРОЙСТВО НАСТРОЙКИ СИСТЕМЫ АВТОМАТИЧЕСКОГО РЕГУЛИРОВАНИЯ ДАВЛЕНИЯ (САРД) В МАГИСТРАЛЬНОМ ТРУБОПРОВОДЕ ДЛЯ ПЕРЕКАЧИВАНИЯ НЕФТЕПРОДУКТОВ | 2014 |
|
RU2578297C1 |
| Способ определения аномалии в киберфизической системе | 2022 |
|
RU2790331C1 |
| Способ управления аппаратом воздушного охлаждения газа | 2024 |
|
RU2833595C1 |
| Способ диагностики и мониторинга аномалий в кибер-физической системе | 2021 |
|
RU2784981C1 |
| НЕЛИНЕЙНАЯ АДАПТИВНАЯ СИСТЕМА АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ | 2004 |
|
RU2267147C1 |
| Способ регулирования отпуска тепла отопительных котельных с приведением параметров потоков среды в установившееся состояние | 2017 |
|
RU2715118C2 |
| Адаптивная система управления нестационарным линейным объектом | 1984 |
|
SU1277067A1 |
| СТАБИЛИЗАТОР ВООРУЖЕНИЯ БОЕВОГО МОДУЛЯ | 2023 |
|
RU2827861C1 |
| СПОСОБ РЕГУЛИРОВАНИЯ ЧАСТОТЫ ВРАЩЕНИЯ РОТОРА РЕАКТИВНОЙ ГИДРАВЛИЧЕСКОЙ ТУРБИНЫ И ПИД-РЕГУЛЯТОР ЧАСТОТЫ ВРАЩЕНИЯ СИЛЬНОГО ДЕЙСТВИЯ | 2021 |
|
RU2781087C1 |
Изобретения относятся к области автоматизированного управления сложными информационными устройствами, использующими ПИД-законы регулирования, и могут найти применение в радиотехнических системах с хаотической динамикой реализации своих целевых функций в условиях интенсивного информационного возмущения. Техническим результатом является улучшение динамики процессов регулирования и расширение функциональных возможностей системы. Согласно способу устанавливают соответствие между допустимыми уровнями критичности отклонений параметров конфигурации управляемой системы (ПК УС) и уровнем критичности их отклонений; по значениям матрицы принятия решений вычисляют погрешности отклонений значений ПК УС и проверяют их на соответствие допустимым уровням критичности отклонений ПК УС: в случае соответствия - сохраняют предыдущие значения ПК УС и проводят рефакторинг начального содержания множества значений матрицы принятия решений, а в случае несоответствия - запоминают это событие и вычисленные погрешности отклонений значений ПК УС и назначают управляющее воздействие на УС на основе выбора значений из матрицы принятия решений; в случае выявления недостающих и/или некорректно заданных значений параметров конфигурации УС - проводят рефакторинг содержания множества значений матрицы принятия решений по каждому из ПК УС для заданных условий эксплуатации УС путем добавления выявленных недостающих значений и/или изменения некорректных значений матрицы принятия решений; сохраняют предыдущие значения ПК УС, назначают управляющее воздействие на УС и проводят рефакторинг содержания множества значений матрицы принятия решений путем замены предыдущих значений ПК УС текущими значениями ПК УС. Система содержит коммутационные матрицы входов и выходов (1, 2), решающее устройство (3), пропорциональный блок (4), контроллер функциональной логики (9), исполнительный блок (11), управляемый объект (12) и интегрирующе-дифференцирующий блок (10), содержащий К интегрирующе-дифференцирующих кластеров (71…7к), каждый из которых содержит один из К интегрирующих блоков (51…5к) и один из К дифференцирующих блоков (61…6к) с собственными нормирующими коэффициентами. 2 н.п. ф-лы, 7 ил.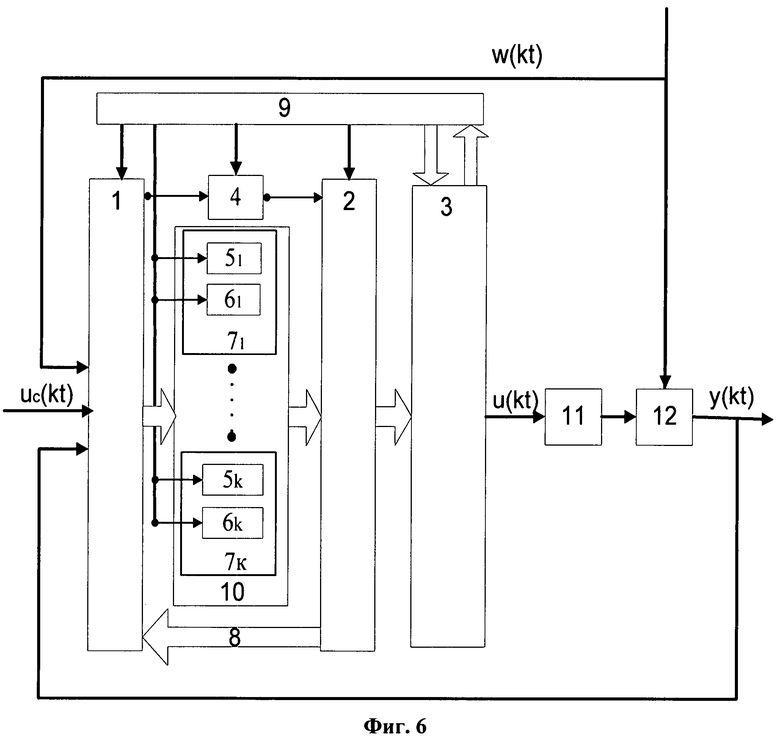
1. Способ адаптивного управления на основе закона ПИД-регулирования, заключающийся в следующих действиях:
используя априорные значения параметров конфигурации управляемой системы (УС) для заданных условий эксплуатации УС, определяют допустимые уровни критичности отклонений соответствующих параметров конфигурации УС в виде логических функций, заданных на соответствующих множествах отклонений значений параметров конфигурации УС, согласно возможным уровням отклонений параметров входного сигнала от соответствующих значений матрицы принятия решений;
полученные значения допустимых уровней критичности отклонений параметров конфигурации УС используют для установки однозначного соответствия между параметром конфигурации УС и уровнем критичности его отклонения;
по значениям матрицы принятия решений вычисляют погрешности отклонений значений параметров конфигурации УС;
если вычисленные погрешности отклонений значений параметров конфигурации УС соответствуют допустимым уровням критичности отклонений параметров конфигурации УС, сохраняют предыдущие значения параметров конфигурации УС и проводят рефакторинг начального содержания множества значений матрицы принятия решений;
если вычисленные погрешности отклонений значений параметров конфигурации УС не соответствуют допустимым уровням критичности отклонений параметров конфигурации УС, запоминают это событие и вычисленные погрешности отклонений значений параметров конфигурации УС;
далее осуществляют адаптацию значений параметров конфигурации УС к выявленным отклонениям функционирования УС путем назначения управляющего воздействия на УС на основе выбора значений из матрицы принятия решений, при этом устанавливают соответствие между текущими и допустимыми значениями параметров конфигурации УС;
если выявлены недостающие и/или некорректно заданные значения параметров конфигурации УС, проводят рефакторинг содержания множества значений матрицы принятия решений по каждому из параметров конфигурации УС для заданных условий эксплуатации УС путем добавления выявленных недостающих значений и/или изменения некорректных значений матрицы принятия решений;
далее сохраняют предыдущие значения параметров конфигурации УС, назначают управляющее воздействие на УС и проводят рефакторинг содержания множества значений матрицы принятия решений путем замены предыдущих значений параметров конфигурации УС текущими значениями параметров конфигурации УС;
повторяют вышеописанные действия, начиная с этапа определения уровня критичности отклонений параметров конфигурации УС для заданных условий эксплуатации УС.
2. Система для реализации адаптивного управления по ПИД-закону, содержащая коммутационные матрицы входов (КМвх) и выходов (КМвых), последовательно соединенные решающее устройство, исполнительный блок и управляемый объект, выход которого, являющийся выходом устройства, соединен со вторым сигнальным входом КМвх, первый сигнальный вход которой является входом регулируемого сигнала; контроллер функциональной логики (КФЛ), пропорциональный блок и интегрирующе-дифференцирующий блок (ИДБ), включающий К интегрирующе-дифференцирующих кластеров (ИДК), каждый из которых содержит по интегрирующему и дифференцирующему блоку с собственными нормирующими коэффициентами, причем К пар сигнальных входов ИДБ являются парами сигнальных входов соответствующих ИДК, где первый сигнальный вход ИДК является сигнальным входом соответствующего интегрирующего блока, а второй сигнальный вход ИДК является сигнальным входом соответствующего дифференцирующего блока; К пар выходов ИДБ являются парами выходов соответствующих ИДК, из которых первый выход является выходом соответствующего интегрирующего блока, а второй выход является выходом соответствующего дифференцирующего блока; первый выход КМвх соединен с сигнальным входом пропорционального блока, выход которого соединен с первым сигнальным входом КМвых, первый выход которой соединен первым с сигнальным входом решающего устройства, остальные К пар сигнальных входов которого соединены с соответствующими К парами выходов КМвых; остальные К пар выходов КМвх соединены с соответствующими К парами сигнальных входов ИДБ, К пар выходов которого соединены с соответствующими К парами сигнальных входов КМвых, группа выходов которой посредством сигнальной шины соединена с группой сигнальных входов КМвх; первый выход КФЛ соединен с управляющим входом КМвх, второй выход - с управляющим входом пропорционального блока, третий выход - с управляющими входами каждого из К интегрирующих и К дифференцирующих блоков; четвертый выход - с управляющим входом КМвых, а остальные выходы КФЛ соединены с соответствующими управляющими входами решающего устройства, информационные выходы которого соединены с соответствующими информационными входами КФЛ.
| ОЛССОН Г | |||
| и др | |||
| Цифровые системы автоматизации и управления, СПб, Невский диалект, 2001, с | |||
| Железная банная печь | 1915 |
|
SU557A1 |
| Аналого-цифровой приемник сигналов данных | 1989 |
|
SU1635277A1 |
| Адаптивная система управления нестационарным линейным объектом | 1984 |
|
SU1277067A1 |
| НЕЛИНЕЙНАЯ АДАПТИВНАЯ СИСТЕМА АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ | 2004 |
|
RU2267147C1 |
| Адаптивная система управления | 1985 |
|
SU1553954A1 |
| RU 97108169 a, 10.06.1999 | |||
| САМОНАСТРАИВАЮЩИЙСЯ ПИД-РЕГУЛЯТОР | 2009 |
|
RU2419122C2 |
| Пломбировальные щипцы | 1923 |
|
SU2006A1 |
| JP 5181504 A, 23.07.1993 | |||
| JP 2000110656 A, 18.04.2000 | |||
| JP 2003195907 A, 11.07.2003 | |||
| US 4407013 A1, 27.09.1983 | |||

