Изобретение относится к авиации, а более конкретно к оборудованию, обеспечивающему заправку воздушных судов (ВС) топливом в полете, и может быть использовано в системе беспилотных летательных аппаратов-заправщиков и заправляемых беспилотных летательных аппаратов (БЛА) с целью повышения эффективности применения последних, а именно, увеличения времени пребывания в воздухе, радиуса боевого применения, массы полезной нагрузки при взлете.
Известна «Система заправки самолета топливом в полете» (см. патент РФ №2104229, С1, МПК B64D 39/00). Система заправки включает заправочный шланг с конусом, установленный на самолете-заправщике, устройство выпуска-уборки шланга, заправочную штангу, установленную на заправляемом самолете, датчики положения конуса и заправочной штанги, средство определения взаимного положения конуса и заправочной штанги, содержащее вычислитель. В системе используются приемники спутниковой навигационной системы (СНС), предназначенные для высокоточного измерения относительных координат и скоростей между самолетом-заправщиком, заправляющимся самолетом и конусом, которые выводятся на экран индикатора, и на основании которых пилот заправляющегося самолета производит управление самолетом до попадания заправочной штанги в конус и производства стыковки. Однако данная система не предназначена для решения задачи заправки БЛА. Недостатком данной системы является зависимость от СНС, что приводит к усложнению бортового оборудования ВС.
Ближайшим аналогом изобретения является «Способ и устройство для заправки в полете беспилотного самолета» (см. патент США №5131438, кл. B64D 39/00), который может быть принят в качестве прототипа.
Устройство содержит на беспилотном самолете выдвижной заправочный шланг, снабженный заправочным конусом, устройство управления шлангом, управляемое из самолета-заправщика, снабженного заправочной штангой. Кроме того, устройство снабжено передающим средством, установленным на самолете-заправщике, и приемным средством, установленным на беспилотном самолете, принимающим сигналы от передающего средства и управляющим устройством управления шлангом. При этом приемное и передающее средства выполнены в виде индуктивных катушек самовозбуждения, установленных на конусе и заправочной штанге.
Недостатками такой системы являются большие психофизические нагрузки на пилота самолета-заправщика ввиду отсутствия у него точных координат о взаимном положении конуса и штанги, возможность применения только при малом расстоянии между ними, что снижает надежность и безопасность заправки, а также - невозможность осуществления заправки в сложных метеоусловиях, особенно в темное время суток.
Техническим результатом, на достижение которого направлено предлагаемое изобретение, является выполнение заправки БЛА топливом в полете в автоматическом режиме, а также повышение безопасности и надежности на этапе стыковки.
Технический результат достигается тем, что предлагаемая система заправки БЛА топливом в полете обеспечивает организованное взаимодействие воздушных судов, вывод БЛА в зону заправки и эффективное выполнение стыковки конуса БЛА-заправщика с заправочной штангой заправляемого БЛА в любое время года и суток вне зависимости от спутниковой навигационной системы.
Сущность изобретения заключается в том, что в систему заправки БЛА топливом в полете, содержащую оборудование, установленное на БЛА-заправщике в составе заправочного шланга с установленным на одном конце конусом, агрегата заправки, выход которого соединен с другим концом заправочного шланга, и оборудование, установленное на заправляемом БЛА в составе заправочной штанги, дополнительно введены блок управления, выход которого соединен со входом агрегата заправки, и установленные на конусе заправочного шланга датчик положения конуса и датчик стыковки, выход которого соединен со вторым входом блока управления, а в состав оборудования, установленного на заправляемом БЛА, введены последовательно соединенные блок определения положения конуса и блок расчета параметров рассогласования, а также установленный в баке датчик уровня топлива, выход которого соединен со вторым входом блока расчета параметров рассогласования, и при этом блок управления и блок расчета параметров рассогласования соединены линией связи, а также блок определения положения конуса установлен на заправочной штанге на заданном расстоянии от узла стыковки заправочной штанги и связан с датчиком положения конуса оптической линией связи и кроме того, блок расчета параметров рассогласования связан с системой автоматического управления (САУ) и инерциальной навигационной системой (ИНС) заправляемого БЛА, а блок управления связан с ИНС БЛА-заправщика.
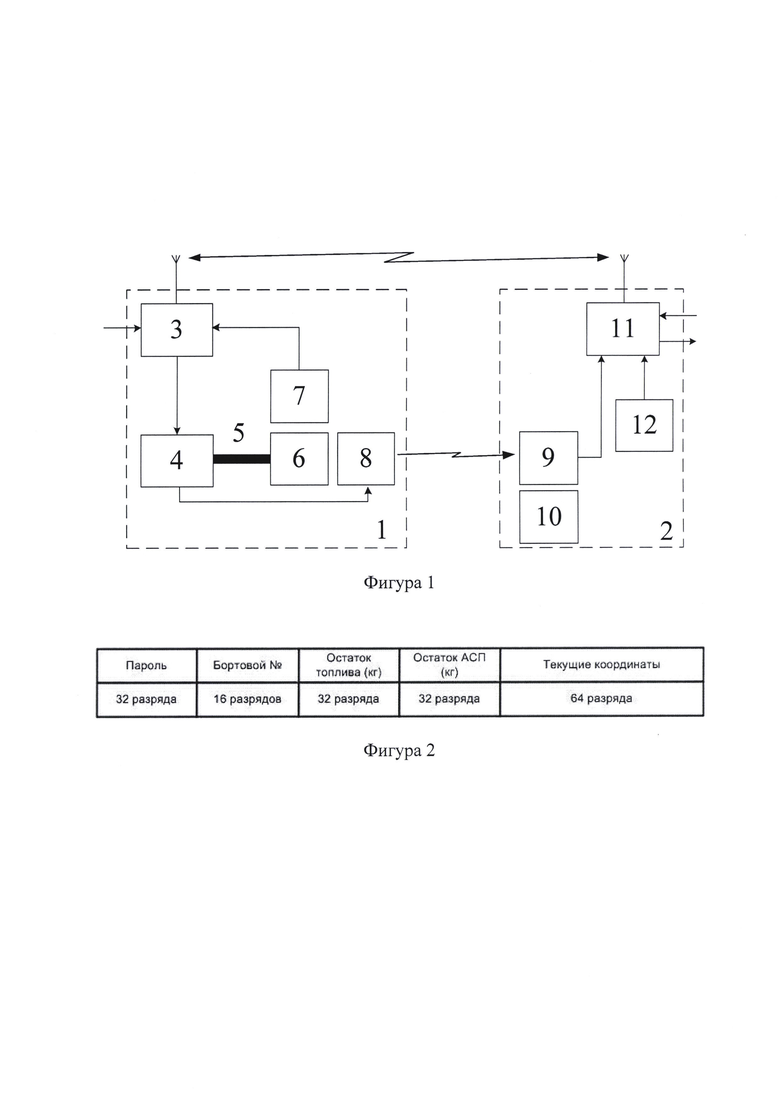
На фиг. 1 изображена блок-схема системы заправки БЛА топливом в полете, которая включает оборудование, установленное на БЛА-заправщике, и оборудование, установленное на заправляемом БЛА; на фиг. 2 - примерная структура кода радиочастотной идентификационной метки (РЧИМ); на фиг. 3 - схема взаимодействия БЛА-заправщика с группой БЛА в зоне заправки; на фиг. 4 - положение конуса в системе координат блока определения положения конуса.
Оборудование БЛА-заправщика 1 включает (см. фиг. 1): заправочный шланг 5, с установленным на одном конце конусом 6, агрегат заправки 4, выход которого соединен с другим концом заправочного шланга, блок управления 3 и установленные на конусе заправочного шланга датчик стыковки 7 и датчик положения конуса (ДПК) 8.
Оборудование заправляемого БЛА 2 включает (см. фиг. 1): заправочную штангу 10, блок определения положения конуса 9, блок расчета параметров рассогласования 11, а также датчик уровня топлива 12.
Агрегат заправки 4 может быть выполнен, например, в виде блока автоматического управления процессами выпуска-уборки заправочного шланга с конусом и подачи топлива, и должен включать электрооборудование, обеспечивающее электропитание ДПК и систем, реализующих указанные процессы.
Конус заправочного шланга 6 может быть известной конструкции, кроме того, на нем размещаются датчик стыковки 7 и ДПК 8.
Датчик стыковки 7, в составе заправочного конуса 6, предназначен для выдачи в блок управления 3 сигнала об осуществлении стыковки (расстыковки) заправочной штанги 10 и конуса 6.
ДПК 8, при измерении параметров взаимного положения конуса 6 и заправочной штанги 10, может быть выполнен, например, в виде двух источников оптического излучения (маркеров), которые расположены на ободе конуса 6 диаметрально противоположно друг другу по горизонтали, чтобы исключить возможность затенения одного из маркеров при сближении заправочной штанги 10 с конусом 6, и своим излучением «подсвечивают» его для распознавания блоком определения положения конуса 9.
Блок определения положения конуса 9 предназначен для выдачи в блок расчета параметров рассогласования 11 координат конуса 6, дальности до конуса и скорости сближения с ним, и может быть выполнен, например, в виде объектива с цифровой матрицей, установленного на заправочной штанге 10 так, чтобы направление его апертуры совпадало с направлением оси заправочной штанги.
Датчик уровня топлива 12, расположенный в баке заправляемого БЛА, предназначен для выдачи в блок расчета параметров рассогласования 11 сигнала о достижении требуемого значения уровня топлива.
Блок управления 3 в составе оборудования БЛА-заправщика 1 и блок расчета параметров рассогласования 11 в составе оборудования заправляемого БЛА 2 могут быть выполнены, например, как бортовые цифровые вычислительные машины (БЦВМ), связанные с приемопередающими устройствами, формирующие на основании исходных и поступающих данных сигналы управления, подаваемые на исполнительные устройства. При этом, блок управления 3 БЛА-заправщика и блок расчета параметров рассогласования 11 заправляемого БЛА соединены линией связи.
Таким образом, блок управления 3 выполняет основные функции по осуществлению взаимодействия с заправляемыми БЛА, управлению процессами выпуска-уборки заправочного шланга 5 с конусом 6 и подачи топлива. Блок расчета параметров рассогласования 11, в свою очередь, решает задачу обеспечения взаимодействия с БЛА-заправщиком, формирует параметры рассогласования и выдает их в САУ заправляемого БЛА, обеспечивая тем самым выход заправляемого БЛА в зону заправки, выполнение маневрирования заправляемого БЛА для сближения с заправочным конусом и стыковку с ним.
Работа системы заправки БЛА топливом в полете может выполняться по вновь разработанному алгоритму, состоящему из нескольких этапов:
1 этап - выход заправляемого БЛА в зону заправки и заход БЛА-заправщику в заднюю полусферу (ЗПС);
2 этап - сближение с БЛА-заправщиком;
3 этап - стыковка заправочной штанги заправляемого БЛА с конусом БЛА-заправщика;
4 этап - заправка и расстыковка.
Первый этап - выход заправляемого БЛА в зону заправки и заход БЛА-заправщику в ЗПС. На данном этапе для осуществления заправки назначается специальная зона, границы которой вводятся в память БЦВМ БЛА (например, на этапе предполетной подготовки). В установленной зоне барражирует БЛА-заправщик. Взаимодействие с ним каждого БЛА группы осуществляется, например, на основе использования известной технологии радиочастотных идентификационных меток (РЧИМ).
РЧИМ в предлагаемой системе представляет собой передаваемый по радиочастотным каналам некоторый код, содержащий, например, следующую информацию: пароль системы опознавания «свой-чужой», бортовой номер БЛА, остаток топлива (кг), остаток боезапаса авиационных средств поражения (АСП) (кг), координаты БЛА, определяющие его текущее местоположение. Текущее местоположение БЛА может определяться различными способами, например с помощью инерциальной навигационной системы (ИНС). Примерная структура кода РЧИМ представлена на фиг. 2.
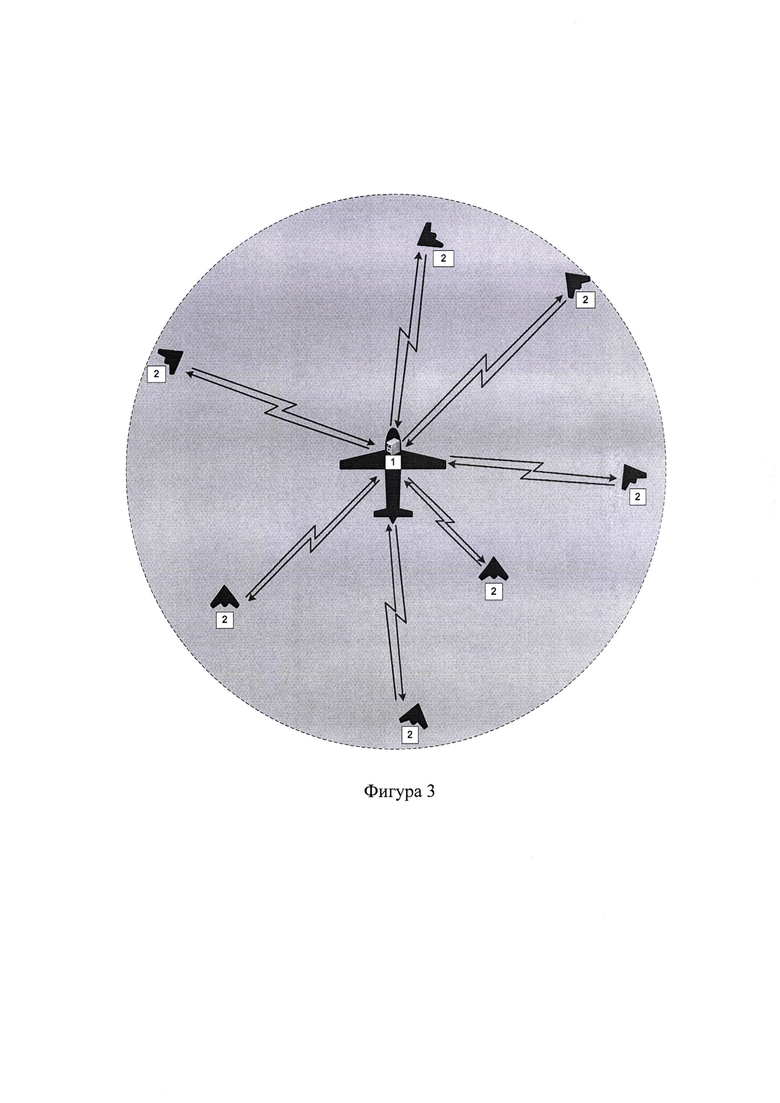
БЛА при входе в зону заправки посредством всенаправленной антенны периодически излучает в пространство радиоимпульсы, содержащие запрос на получение информации от находящегося в зоне заправки БЛА-заправщика о его координатах. При получении запроса БЛА-заправщик посредством всенаправленной антенны излучает в пространство радиоимпульсы, содержащие информацию о его координатах и запрос на получение данных от находящихся в зоне заправки БЛА. При их получении БЛА посредством РЧИМ передают записанную на них информацию, которая поступает для обработки в блок управления, находящийся на борту БЛА-заправщика (фиг. 3).
В процессе обработки информации определяется очередность обслуживания БЛА и разрешение конфликтных ситуаций, если таковые возникают. Конфликт может возникнуть при одновременном поступлении запроса на обслуживание от нескольких БЛА. Для разрешения конфликта используется принцип приоритетности по следующим параметрам: остатку топлива (ОТ), остатку боезапаса АСП (ОАСП), удалению БЛА от БЛА-заправщика. Приоритетом обладает БЛА с наименьшим из сравниваемых ОТ. При равенстве этого параметра приоритетом пользуется БЛА с наибольшим ОАСП. При равенстве и этого параметра приоритетом обладает БЛА с наименьшим удалением от БЛА-заправщика. В результате формируется список очередности заправки БЛА, согласно которому БЛА-заправщик по радиочастотному каналу посылает команды на подход, сближение и стыковку для заправки БЛА с определенным номером.
БЛА, получивший команду от БЛА-заправщика на подход для выполнения заправки, используя координаты БЛА-заправщика, изменяет параметры своего движения таким образом, чтобы по кратчайшему пути выполнить подход к БЛА-заправщику и оказаться в его ЗПС.
Второй этап - сближение с БЛА-заправщиком. Данный этап начинается с момента захода БЛА-заправщику в ЗПС. Предварительно блок управления БЛА-заправщика формирует управляющий сигнал на выпуск заправочного шланга с конусом и подачу электропитания на ДПК.
При обнаружении конуса в блоке определения положения конуса формируются оценочные значения координат конуса, дальности и скорости сближения с ним, которые поступают в блок расчета параметров рассогласования. Оценка координат конуса может быть реализована, например, на основании вновь полученных уравнений квазиоптимальной фильтрации
где  - текущие оценки координат центра конуса, радиуса и случайной начальной фазы изменения углового положения маркера относительно центра изображения;
- текущие оценки координат центра конуса, радиуса и случайной начальной фазы изменения углового положения маркера относительно центра изображения;  - эквивалентные постоянные времени; R - радиус маркера, N - спектральная плотность шума; П1, П2, П3, П4 - показатели степени, имеющие вид
- эквивалентные постоянные времени; R - радиус маркера, N - спектральная плотность шума; П1, П2, П3, П4 - показатели степени, имеющие вид

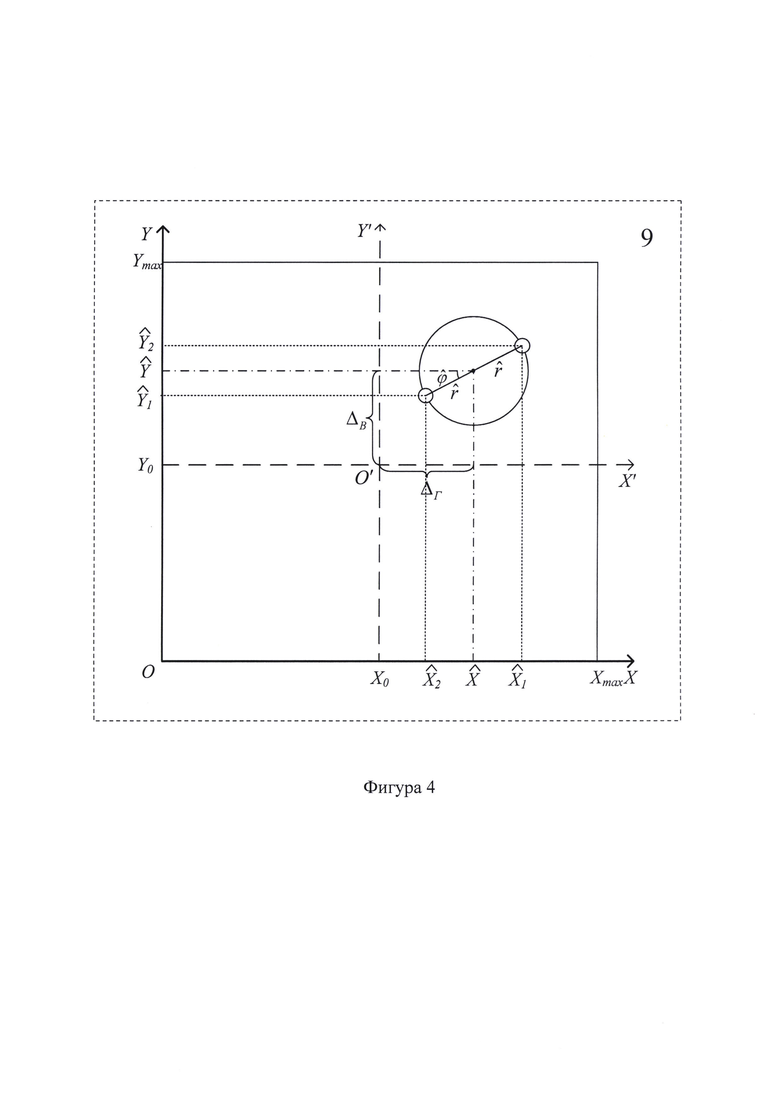
На основании определенных параметров положения ДПК  относительно координат центра матрицы объектива (X0; Y0) блок расчета параметров рассогласования выдает в САУ следующие параметры (фиг. 4)
относительно координат центра матрицы объектива (X0; Y0) блок расчета параметров рассогласования выдает в САУ следующие параметры (фиг. 4)

Параметры рассогласования ΔГ и ΔВ определяют угловые отклонения линии визирования конуса относительно продольной оси заправочной штанги в горизонтальной и вертикальной плоскостях, а параметр δ - величину отклонения центра апертуры объектива от центра конуса. САУ, используя указанные параметры, формирует управляющие воздействия на рулевые механизмы для отклонения соответствующих рулей (направления, высоты, элеронов, флаперонов) таким образом, чтобы свести к нулю значения параметров рассогласования. При этом маневрирование должно выполняться без отклонения БЛА по углам рысканья и тангажа.
Дальность до конуса с известными размерами однозначно определяется по размеру его изображения на матрице объектива, а по изменению дальности вычисляется скорость сближения как производная от дальности.
Третий этап - стыковка заправочной штанги заправляемого БЛА с конусом агрегата заправки БЛА-заправщика. Данный этап является наиболее важным с точки зрения безопасности и надежности стыковки и начинается при подходе к конусу на расстояние нескольких метров. На этом этапе отклонение центра апертуры объектива от центра конуса не должно превышать половины радиуса конуса. Для этого текущий параметр рассогласования δ сравнивается с требуемым δT, который определяется по выражению

Если δ>δТ, то от блока расчета параметров рассогласования в САУ БЛА поступает сигнал на удаление от конуса, после чего отрабатывается рассогласование и продолжается сближение до момента стыковки.
Четвертый этап - заправка и расстыковка. После того, как произошла стыковка заправочной штанги с конусом, от датчика стыковки поступает сигнал в блок управления. Блок управления, получив сигнал от датчика стыковки, выдает разрешающий сигнал на блок автоматического управления процессом подачи топлива агрегата заправки и начинается процесс передачи топлива от БЛА-заправщика к заправляемому БЛА. В момент, когда уровень топлива достигает определенного значения, сигнал от датчика уровня топлива поступает в блок расчета параметров рассогласования заправляемого БЛА и передается на блок управления БЛА-заправщика по линии связи, при этом блок управления выдает запрещающий сигнал на блок автоматического управления процессом подачи топлива агрегата заправки, при этом передача топлива прекращается и от БЛА-заправщика обратно поступает разрешающий сигнал на расстыковку.
Таким образом, предлагаемая система заправки БЛА топливом в полете позволит производить заправку БЛА топливом в полете в любое время года и суток в автоматическом режиме, повысить надежность и безопасность на этапе стыковки, а в случае ее применения для пилотируемых ВС значительно снизить психофизические нагрузки на экипаж ВС. Тем самым устраняются недостатки прототипа.
Предлагаемое техническое решение является новым, поскольку из общедоступных сведений не известна система заправки БЛА топливом в полете, работающая в условиях представленного алгоритма взаимодействия БЛА-заправщика и заправляемого БЛА и позволяющая производить оценку координат конуса, дальности до конуса и скорости сближения с ним по формируемому в блоке определения положения конуса изображению, отличающаяся тем, что в состав оборудования, установленного на БЛА-заправщике, дополнительно введены блок управления и установленные на конусе заправочного шланга датчик положения конуса и датчик стыковки, а в состав оборудования, установленного на заправляемом БЛА, введены блок определения положения конуса и блок расчета параметров рассогласования, а также установленный в баке датчик уровня топлива. Кроме того, блок управления БЛА-заправщика и блок расчета параметров рассогласования заправляемого БЛА соединены линией связи, при этом блок расчета параметров рассогласования связан с системой автоматического управления и инерциальной навигационной системой заправляемого БЛА, а блок управления связан с инерциальной навигационной системой БЛА-заправщика.
Предлагаемое техническое решение практически применимо, так как для его реализации могут быть использованы штатные средства, входящие в состав бортового радиоэлектронного оборудования воздушных судов.
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА ЗАПРАВКИ САМОЛЕТА ТОПЛИВОМ В ПОЛЕТЕ | 1996 |
|
RU2104229C1 |
| Наземный подвижный стенд и способ его применения для испытаний системы автоматического управления дозаправкой в воздухе | 2023 |
|
RU2819151C1 |
| УСТРОЙСТВО КОНТРОЛЯ ЗАПРАВКИ САМОЛЕТА ТОПЛИВОМ В ПОЛЕТЕ | 1997 |
|
RU2111154C1 |
| Система дозаправки в воздухе с автоматическим управлением и автостабилизируемым заправочным устройством | 2023 |
|
RU2809164C1 |
| СПОСОБ ИНДИКАЦИИ ТЕКУЩЕЙ И ПРОГНОСТИЧЕСКОЙ ИНФОРМАЦИИ В ПРОЦЕССЕ ВОЗДУШНОЙ ДОЗАПРАВКИ ЛЕТАТЕЛЬНОГО АППАРАТА | 2017 |
|
RU2676594C2 |
| САМОЛЕТ-ЗАПРАВЩИК | 1994 |
|
RU2100257C1 |
| САМОЛЕТ-ЗАПРАВЩИК | 1994 |
|
RU2142897C1 |
| УСТРОЙСТВО ВИЗУАЛЬНОГО КОНТРОЛЯ ПРОСТРАНСТВЕННОГО ПОЛОЖЕНИЯ И СКОРОСТИ ЗАПРАВЛЯЕМОГО САМОЛЕТА ПРИ ДОЗАПРАВКЕ ТОПЛИВОМ В ПОЛЕТЕ | 1996 |
|
RU2099253C1 |
| СПОСОБ ОБЕСПЕЧЕНИЯ БЕЗОПАСНОСТИ ЗАПРАВКИ ТОПЛИВОМ В ПОЛЕТЕ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2014 |
|
RU2575301C1 |
| СПОСОБ УПРАВЛЕНИЯ ПРОСТРАНСТВЕННЫМ ПОЛОЖЕНИЕМ И СКОРОСТЬЮ ЗАПРАВЛЯЕМОГО САМОЛЕТА ПРИ ДОЗАПРАВКЕ ТОПЛИВОМ В ПОЛЕТЕ | 1996 |
|
RU2090458C1 |
Система заправки беспилотного летательного аппарата (БЛА) топливом в полете содержит оборудование БЛА-заправщика и оборудование заправляемого БЛА. Оборудование БЛА-заправщика содержит заправочный шланг с установленным конусом на одном конце, агрегат заправки, блок управления, датчик положения конуса и датчик стыковки, установленные на конусе заправочного шланга. Оборудование заправляемого БЛА содержит заправочную штангу, блок определения положения конуса, блок расчета параметров рассогласования, датчик уровня топлива. Обеспечивается повышение безопасности и надежности стыковки и расстыковки для заправки топливом в полете в автоматическом режиме. 1 з.п. ф-лы, 4 ил.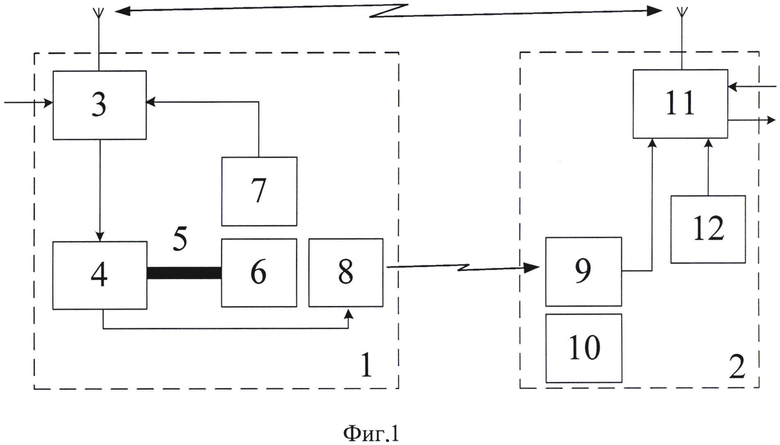
1. Система заправки беспилотного летательного аппарата топливом в полете, содержащая оборудование, установленное на беспилотном летательном аппарате-заправщике в составе заправочного шланга с установленным на одном конце конусом, агрегата заправки, выход которого соединен с другим концом заправочного шланга, и оборудование, установленное на заправляемом беспилотном летательном аппарате в составе заправочной штанги, отличающаяся тем, что в состав оборудования, установленного на беспилотном летательном аппарате-заправщике, дополнительно введены блок управления, выход которого соединен со входом агрегата заправки, и установленные на конусе заправочного шланга датчик положения конуса и датчик стыковки, выход которого соединен со вторым входом блока управления, а в состав оборудования, установленного на заправляемом беспилотном летательном аппарате, введены последовательно соединенные блок определения положения конуса и блок расчета параметров рассогласования, а также установленный в баке датчик уровня топлива, выход которого соединен со вторым входом блока расчета параметров рассогласования, и при этом блок управления и блок расчета параметров рассогласования соединены линией связи.
2. Система заправки беспилотного летательного аппарата топливом в полете по п. 1, отличающаяся тем, что блок определения положения конуса установлен на заправочной штанге на заданном расстоянии от узла стыковки заправочной штанги и связан с датчиком положения конуса оптической линией связи, при этом блок расчета параметров рассогласования связан с системой автоматического управления и инерциальной навигационной системой заправляемого беспилотного летательного аппарата, а блок управления связан с инерциальной навигационной системой беспилотного летательного аппарата-заправщика.
| СИСТЕМА ЗАПРАВКИ САМОЛЕТА ТОПЛИВОМ В ПОЛЕТЕ | 1996 |
|
RU2104229C1 |
| СПОСОБ ОБЕСПЕЧЕНИЯ БЕЗОПАСНОСТИ ЗАПРАВКИ ТОПЛИВОМ В ПОЛЕТЕ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2014 |
|
RU2575301C1 |
| УСТРОЙСТВО КОНТРОЛЯ ЗАПРАВКИ САМОЛЕТА ТОПЛИВОМ В ПОЛЕТЕ | 1997 |
|
RU2111154C1 |
| EP 928741 A1, 14.07.1999 | |||
| Режущая головка к устройству для снятия обкладочной резины с тросов резинотросовой ленты | 1984 |
|
SU1193008A1 |

