Группа изобретений относится к области авиации, а именно к способу стыковки летательных аппаратов, сцепному устройству и стыковочной системе, содержащей такое сцепное устройство, и может быть использована для выполнения возвращения летательных аппаратов, в частности беспилотных летательных аппаратов (далее - БпЛА), на борт самолета-носителя, их буксировки или дозаправки.
Из уровня техники известны способы применения БпЛА с борта другого самолета (пилотируемого или беспилотного), использующегося в качестве носителя, обладающего значительной дальностью полета, и служащего для доставки БпЛА в район действия, управления БпЛА, выполняя функцию ретранслятора или воздушного пункта управления, и эвакуации БпЛА после выполнения задания. Для реализации таких способов применения крайне необходимы системы, позволяющие выполнять автоматическую стыковку двух летательных аппаратов в воздухе с последующим возвращением БпЛА на борт самолета-носителя, при этом стыковка и возвращение должны выполняться быстро, безопасно, в сложных метеоусловиях и ночью, а также в условиях воздействия радиопомех.
Для целей передачи топлива от одного самолета другому самолету или вертолету (т.е. дозаправки) в настоящее время широко используются два основных способа выполнения стыковки двух летательных аппаратов, находящихся в воздухе. Один из способов стыковки с целью дозаправки реализуется с помощью шланга, выпускаемого самолетом-заправщиком, имеющего на свободном конце конический захват, стабилизируемый в потоке воздуха за счет его аэродинамической формы, к которому стыкуется заправляемый самолет с помощью заправочной штанги, под управлением пилота заправляемого самолета (США был также проведен успешный эксперимент стыковки этим способом БпЛА Х-47 к самолету-заправщику). Недостатком такого способа является наличие высоких требований к профессиональному мастерству пилота заправляемого самолета, особенно в сложных метеоусловиях и в ночное время, из-за чего отсутствует возможность выполнения подстыковки строевыми летчиками без специальной подготовки. Также сложна реализация стыковки беспилотным дистанционно или автоматически управляемым летательным аппаратом, из-за необходимости учета факторов, связанных с динамикой подхода заправляемого самолета к коническому захвату, таких как: инерционность самолета, приемистость реактивного двигателя, недостаточная для точного управления по продольной оси самолета, возмущения атмосферы, на которые легкий объект, конический захват, реагирует быстрее чем более массивный заправляемый самолет. Этот способ также малопригоден для выполнения буксировки самолета из-за значительных габаритов конического захвата, с высоким аэродинамическим сопротивлением, что определяется необходимостью обеспечения пассивной стабилизации конического захвата в потоке воздуха и требуемой большой площадью створа захвата для гарантированного попадания в него заправочной штанги заправляемого самолета. Другой известный способ стыковки с целью дозаправки выполняется с помощью жесткой, шарнирно закрепленной на самолете-заправщике телескопической штанги, имеющей аэродинамические органы управления, которыми управляет оператор заправки, находящийся на самолете-заправщике, и который выполняет стыковку выдвижного конца штанги к заправочной горловине заправляемого самолета, предварительно занявшего стабильное положение сзади и ниже самолета-заправщика на расстоянии, достижимом для штанги. Недостатком такого способа стыковки является наличие габаритной телескопической штанги, что применимо только на тяжелых самолетах, в количестве - не более одной (в то время, как шлангов по известному вышеуказанному способу может быть несколько, и шланги могут устанавливаться на легких самолетах). Также высокие требования к профессиональному мастерству пилота заправляемого самолета, особенно в сложных метеоусловиях и в ночное время, что вызвано необходимостью подхода заправляемого самолета к самолету-заправщику на близкое расстояние, определяемое длиной телескопической штанги, из-за чего отсутствует возможность выполнения подстыковки строевыми летчиками без специальной подготовки. Невозможен подход заправляемого летательного аппарата к самолету-заправщику на большой скорости и с динамичным маневрированием, с целью сокращения времени на стыковку, из-за опасности столкновения, и также затруднена реализация автоматического или дистанционно управляемого подхода беспилотного летательного аппарата. Также, при этом способе невозможна дозаправка вертолетов.
Из патента RU 2548653 С2, опубликованного 20.04.2015, Кл. B64D 39/06, известна система стыковки с целью дозаправки, в которой стыковка заправочного шланга к заправляемому летательному аппарату осуществляется с помощью датчиков взаимного расположения, использующих дифференциальное спутниковое позиционирование. Недостатком этой системы является зависимость от спутниковых систем позиционирования, которые могут быть в нерабочем состоянии или под воздействием радиопомех. Также управление «стыковочным гнездом», находящемся на конце заправочного шланга, осуществляется внешним сигналом, что проблематично при наличии радиопомех. Также система предполагает стыковку в непосредственной близости от самолета-танкера с обеспечением безопасности только за счет выдачи предупреждающих сигналов о недопустимом сближении, что опасно при наличии радиопомех и любых отказах автоматики.
Примеры успешного подтягивания летательного аппарата к нижней части самолета-носителя на буксировочном тросе в настоящее время неизвестны. Сложности реализации подтягивания летательного аппарата вызваны влиянием буксировочного троса на управление буксируемым летательным аппаратом. Изменения в управляемости нарастают по мере подтягивания летательного аппарата к самолету-носителю, т.е. сокращения длины буксировочного троса, и выражаются в потере эффективности аэродинамических рулей летательного аппарата и возможной перемене рулей, что особенно опасно при начале взаимного влияния аэродинамики корпусов самолета-носителя и буксируемого летательного аппарата при их сближении. Характер изменений сильно зависит от расположения точки зацепа относительно центра масс буксируемого летательного аппарата, его массово-инерционных характеристик, длины и массы троса, а также аэродинамических характеристик всей системы. При подтягивании летательного аппарата к самолету-носителю возникает угроза взаимного повреждения летательного аппарата и конструкции самолета-носителя из-за нестабильности взаимного положения по вышеуказанным причинам (особенно в условиях атмосферной турбулентности). Тем не менее известна разрабатываемая в США система «Gremlins», https://nplus1.ru/news/2020/12/11/gremlins, в которой используется похожий способ с использованием аналога конического захвата, выпускаемого на тросе, к которому стыкуется беспилотный летательный аппарат с целью его последующего перемещения на борт самолета-носителя. В этой системе точка соединения штанги БпЛА и захвата находится над верхней частью корпуса БпЛА, примерно над центром масс, что приводит к значительным сложностям при дальнейшем подтягивании БпЛА к самолету-носителю по вышеуказанным причинам. Для уменьшения влияния возмущений атмосферы аналог конического захвата сделан довольно массивным.
Техническая задача, на решение которой направлена группа изобретений, заключается в обеспечении безопасности, надежности и упрощении процесса стыковки летательных аппаратов.
Группа изобретений обеспечивает получение технического результата, заключающегося в значительном упрощении стыковки летательных аппаратов в воздухе, быстрой и надежной стыковки летательных аппаратов, в том числе в сложных метеоусловиях и ночью, снижении влияния человеческого фактора на процесс стыковки и обеспечение безопасности стыковки.
Группа изобретений включает сцепное устройство, стыковочную систему и способ стыковки летательных аппаратов.
Сцепное устройство, предназначенное для стыковки летательных аппаратов, представляет собой малый буксируемый автоматический летательный аппарат, включающий корпус, коническую нишу с зацепом, расположенную в задней части корпуса, аэродинамические поверхности с электрическими приводами, расположенные на корпусе и выполненные с возможностью управления положением сцепного устройства в воздушном потоке, источник светового сигнала, систему управления, систему машинного зрения с видеокамерой заднего вида, информационный канал связи и источник электропитания.
Стыковочная система включает сцепное устройство, буксировочный трос, лебедку буксировочного троса, штангу с механическим замком, предназначенную для сцепления с зацепом конической ниши в корпусе сцепного устройства, привод штанги, обеспечивающий управление высотой подъема штанги, мишень, выполненную в виде источника светового сигнала и разметки, расположенную на штанге, и предназначенную для взаимодействия с системой машинного зрения сцепного устройства. Стыковочная система дополнительно содержит рычажную систему, имеющую замки крепления, конформные захваты, шарнирно закрепленные на рычажной системе и имеющие замки и задние крюки, передние и задние такелажные узлы, предназначенные для сцепления с замками и задними крюками конформных захватов
Способ стыковки летательных аппаратов с помощью стыковочной системы характеризуется тем, что содержит последовательно выполняемые этапы: выпуск сцепного устройства на буксировочном тросе с самолета носителя, стабилизацию сцепного устройства, с помощью аэродинамических поверхностей и системы управления, обеспечение соосности сцепного устройства и штанги стыкуемого летательного аппарата, с помощью системы управления сцепного устройства, стыковку сцепного устройства и летательного аппарата, подтягивание летательного аппарата к самолету-носителю с управлением летательного аппарата в том числе изменением высоты подъема штанги, сцепление летательного аппарата с конформными захватами путем центрирования и проскальзывания корпуса летательного аппарата в захватах до входа задних крюков захватов в задние такелажные петли летательного аппарата с последующим закрытием замков на передних такелажных петлях летательного аппарата, притягивание захватов с летательного аппарата к корпусу с одновременным складыванием рычажной системы, окончательная фиксация захватов с летательного аппарата замками, подтягивание летательного аппарата на борт самолета-носителя.
Группа изобретений поясняется следующими изображениями:
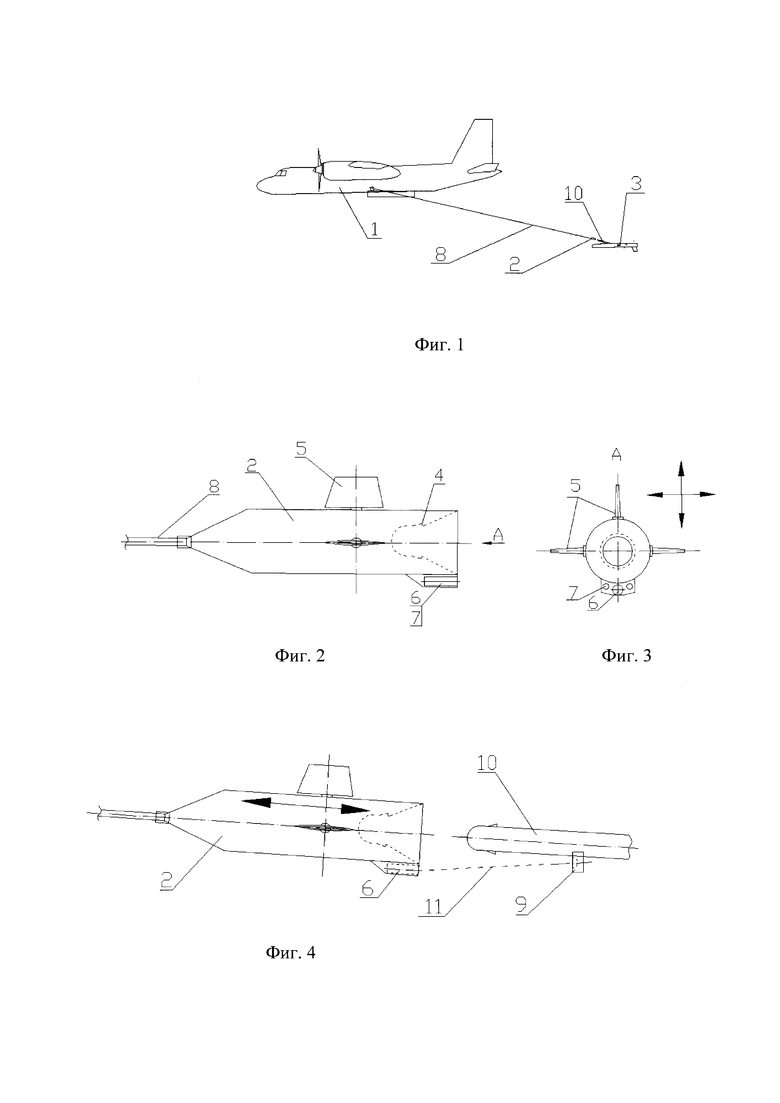
фиг. 1 - самолет-носитель с выпущенным на буксировочном тросе сцепным устройством и БпЛА;
фиг. 2 - сцепное устройство;
фиг. 3 - вид А на сцепное устройство;
фиг. 4 - сцепное устройства и штанга БпЛА в процессе стыковки;
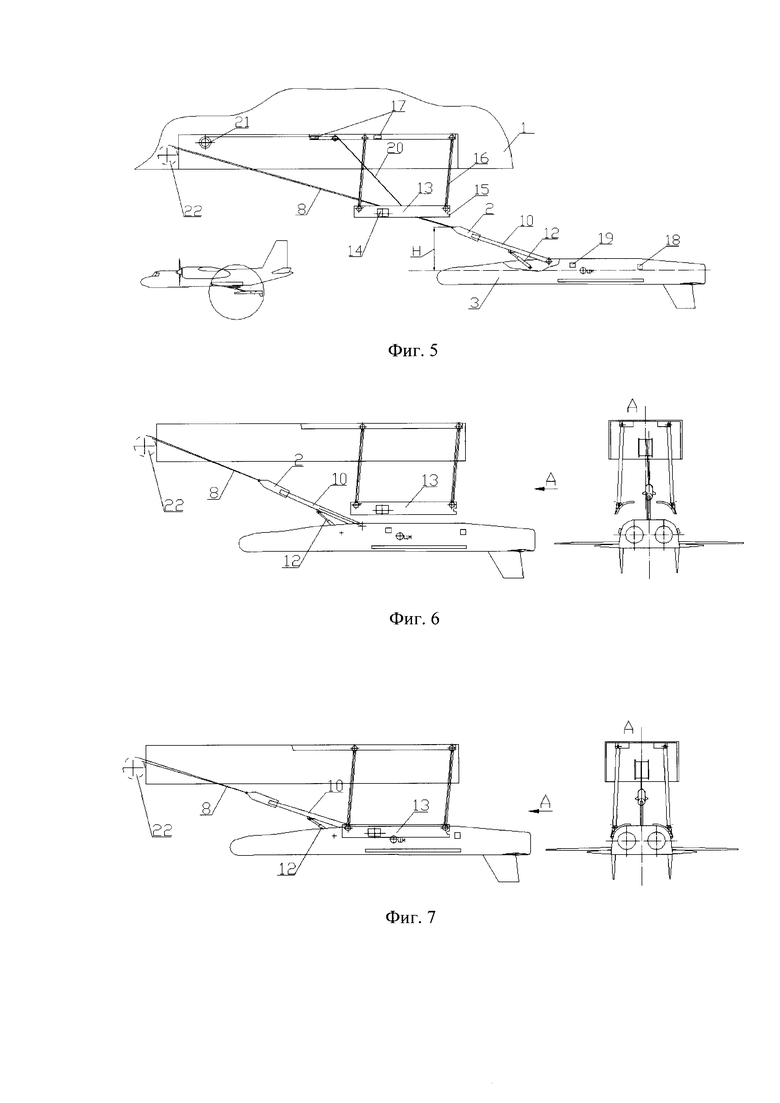
фиг.5 - стыковочная система;
фиг. 6 - расположение БпЛА под конформными захватами;
фиг.7 - центрирование корпуса БпЛА в конформных захватах;
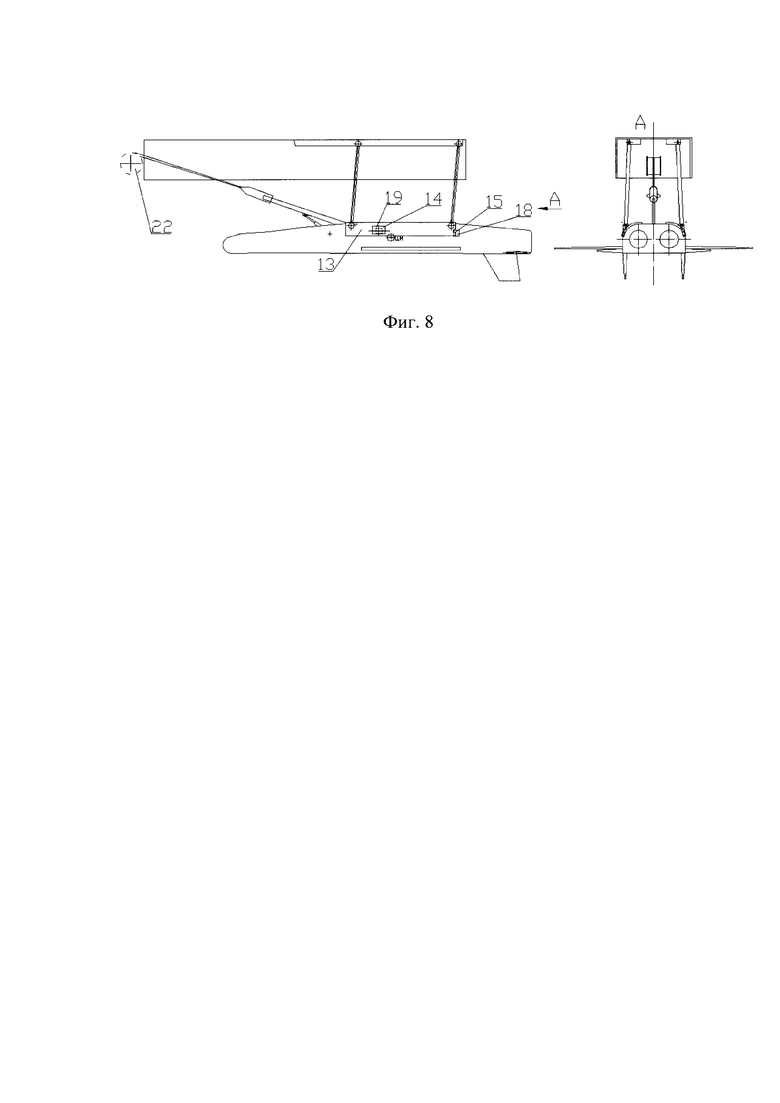
фиг.8 - фиксация БпЛА на конформных захватах.
На фигурах используются следующие обозначения:
1 - самолет-носитель;
2 - сцепное устройство;
3 - БпЛА;
4 - коническая ниша с зацепом;
5 - аэродинамические поверхности;
6 - видеокамера заднего вида;
7 - источник светового сигнала;
8 - буксировочный трос;
9 - мишень (источник светового сигнала штанги);
10 - штанга;
11 - ось визирования;
12 - привод подъема штанги;
13 - конформные захваты;
14 - замки;
15 - задние крюки;
16 - рычажная система;
17 - замки крепления к переходной балке;
18 - задние такелажные петли;
19 - передние такелажные петли;
20 - трос лебедки притягивания;
21 - лебедка притягивания;
22 - лебедка буксировочного троса.
На приведенных фигурах изображены самолет-носитель и БпЛА в качестве стыкуемого летательного аппарата. В качестве стыкуемых летательных аппаратов могут быть использованы любые другие летательные аппараты, не ограничиваясь БпЛА. Самолет-носитель и БпЛА показаны условно, поскольку предлагаемой стыковочной системой могут быть дооборудованы самолеты различного типа. Летательные аппараты могут иметь различную размерность и конструкцию. Для осуществления стыковки летательных аппаратов диапазоны скоростей летательных аппаратов должны пересекаться.
Раскрытие заявленной группы изобретений приведено в варианте выполнения возвращения БпЛА на борт самолета-носителя и запуска БпЛА с самолета-носителя. В варианте реализации изобретения в котором в качестве стыкуемого летательного аппарата применяется БпЛА, БпЛА должен быть оборудован двигательной установкой, работающей по толкающей схеме, на верхней поверхности БпЛА не должно быть выступающих частей, препятствующих стыковке.
Группа изобретений также может использоваться для дозаправки как БпЛА, так и пилотируемых летательных аппаратов в воздухе. В таком варианте самолет-носитель является самолетом-заправщиком, оснащенным соответствующими перекачивающими системами, а вместо обычного буксировочного троса используется трос с заправочным шлангом. В таком варианте сцепное устройство разрабатывается с проходным каналом для топлива и с конической нишей, адаптированной к заправочной штанге заправляемого летательного аппарата.
На фиг. 1 изображены самолет-носитель 1, выпущенное на буксировочном тросе 8 сцепное устройство 2 и БпЛА 3 в процессе выполнения стыковки.
На фиг. 2-4 изображено сцепное устройство 2, представляющее собой малый буксируемый автоматический летательный аппарат, включающий корпус, в задней части которого образована коническая ниша 4 с зацепом. На корпусе сцепного устройства 2 расположены аэродинамические поверхности 5, видеокамера 6 заднего вида и источник 7 светового сигнала. В одном из вариантов выполнения сцепного устройства, показанном на фиг.3, источник 7 светового сигнала выполнен в виде двух светодиодных ламп, направленных назад, но их количество может варьироваться. Носовой частью сцепное устройство 2 крепится к буксировочному тросу 8, который располагается на лебедке 22 буксировочного троса, установленной на самолете-носителе 1. Размерность и конструкция сцепного устройства 2 может быть различной, в зависимости от размерности и конструкции БпЛА 3.
Внутри корпуса сцепного устройства имеется бортовая аппаратура, состоящая из следующих компонентов: система управления, система машинного зрения, информационный канал связи с самолетом-носителем и система электроснабжения.
Система управления включает такие средства как: бортовой вычислитель (компьютер с программным обеспечением), акселерометры, электронный гироскоп, электроприводы аэродинамических поверхностей. Система управления предназначена для управления системой машинного зрения, информационным каналом связи, системой электроснабжения, источником светового сигнала и аэродинамическими поверхностями.
Система машинного зрения включает в себя видеокамеру заднего вида и аппаратуру обработки видеосигнала, которая располагается в корпусе сцепного устройства и может быть выполнена единым блоком с аппаратурой системы управления. Система машинного зрения предназначена для формирования сигналов, передаваемых в систему управления сцепного устройства и на борт самолета-носителя.
Информационный канал связи предназначен для связи сцепного устройства с самолетом носителем. Канал связи состоит из внешнего приемопередающего устройства, использующего любой тип информационной связи (радио, оптический, проводной) и блока обработки входящих и исходящих сигналов, который также может быть выполнен единым блоком с аппаратурой системы управления. В варианте реализации проводной связи, в состав буксировочного троса должны входить соответствующие проводные цепи для передачи информационного сигнала. При реализации радио или оптического типа связи, в состав сцепного устройства должны входить антенно-фидерные устройства или оптическое приемо-передающее устройство соответственно. Соответствующая приемо-передающая аппаратура, также должна быть смонтирована на самолете-носителе. Информационный канал связи в любом варианте выполнения осуществляет двустороннюю передачу информационных сигналов между самолетом-носителем и сцепным устройством.
Система электроснабжения включает в себя источник электропитания бортовых потребителей, который может быть внешним проводным от системы электроснабжения самолета-носителя или внутренним, в виде аккумулятора, и необходим для питания бортовых потребителей (системы управления, системы машинного зрения, информационного канала связи, источника светового сигнала). При реализации проводного источника, в состав буксировочного троса должны входить соответствующие проводные цепи для передачи электроэнергии. Включение и выключение системы электроснабжения сцепного устройства выполняется внешним сигналом с самолета-носителя. При включении системы электроснабжения, система управления стыковочного устройства приступает к выполнению заложенной программы.
На фиг. 5-8 показаны элементы стыковочной системы, взаимодействие элементов стыковочной системы и процесс подтягивания БпЛА к самолету-носителю.
Стыковочная система включает сцепное устройство 2, буксировочный трос 8, лебедку 22 буксировочного троса, штангу 10 с механическим замком, предназначенную для сцепления с зацепом конической ниши 4, расположенной в корпусе сцепного устройства 2, привод 12 штанги 10, обеспечивающий управление высотой подъема штанги 10, мишень 9, выполненную в виде источника светового сигнала и разметки, расположенную на штанге 10, и предназначенную для взаимодействия с системой машинного зрения сцепного устройства 2, рычажную систему 16, имеющую замки 17 крепления, конформные захваты 13, шарнирно закрепленные на рычажной системе 16 и имеющие замки 14 и задние крюки 15, передние и задние такелажные узлы 18, предназначенные для сцепления с замками 14 и задними крюками 15 конформных захватов 13.
При этом сцепное устройство 2, буксировочный трос 8, лебедка 22 буксировочного троса, рычажная система 16, конформные захваты 13, устанавливаются на самолете носителе 1. Штанга 10, привод 12, мишень 9, передние и задние такелажные петли 18 устанавливаются на стыкуемом летательном аппарате, в частности БпЛА 3.
При выполнении возвращения БпЛА на борт самолета-носителя способ стыковки летательных аппаратов осуществляется следующим образом.
При приближении БпЛА 3 самолет-носитель 1 выпускает сцепное устройство 2, закрепленное на буксировочном тросе 8. Буксировочный трос 8 разматывается с лебедки 22 буксировочного троса, установленной на самолете-носителе 1, но не до конца. На лебедке 22 буксировочного троса остается 2-3 метра буксировочного троса 8 для обеспечения возможности выполнения маневра сцепным устройством 2 в продольном направлении (показано стрелками на фиг. 4).
Стабилизация сцепного устройства 2 в потоке воздуха осуществляется пассивно за счет его аэродинамической формы и расположения аэродинамических поверхностей 5. Аэродинамические поверхности 5 расположены на корпусе сцепного устройства так, что его центр масс располагается впереди и ниже центра давления. При этом буксировочное усилие будет приложено в точке соединения сцепного устройства 2 с буксировочным тросом 8, т.е. к носовой части сцепного устройства 2, далеко впереди центра масс и центра давления.
По сигналу с самолета-носителя 1, сцепное устройство 2 включается в работу. Система управления стабилизирует сцепное устройство 2 в потоке воздуха, с помощью аэродинамических поверхностей 5, управляемых электроприводами, ориентируясь по показаниям акселерометров и электронного гироскопа, парируя резкие отклонения, вызванные возмущениями набегающего воздушного потока. При этом продолжается вышеуказанная пассивная стабилизация, определяющая положение сцепного устройства 2 за самолетом-носителем 1. На сцепном устройстве 2 включается источник 7 светового сигнала, который также работает под контролем системы управления. Световой сигнал может быть кодированным, т.е. его светимость может меняться во времени по закону, заданному вычислителем системы управления, с целью облегчения его селекции оптической аппаратурой БпЛА 3 на фоне возможных других источников света. БпЛА 3 находит в пространстве сцепное устройство 2 и занимает стабильное положение за ним на расстоянии 1-3 метра, ориентируясь на световой сигнал. БпЛА 3 может подходить к самолету-носителю 1 быстрым маневром, что особенно важно для малых реактивных БпЛА 3, имеющих ограниченный запас топлива и, следовательно, малый запас времени на стыковку. Удаленность сцепного устройства 2 от самолета-носителя 1, за счет выпуска сцепного устройства 2 на буксировочном тросе 8, обеспечивает безопасность стыковки с БпЛА 3, снижая возможность столкновения БпЛА 3 с самолетом-носителем 1.
БпЛА 3 оснащен буксировочной штангой 10, имеющей мишень 9. Мишень 9 представляет собой источник светового сигнала и разметку, предназначенных для совместной работы с системой машинного зрения сцепного устройства 2. На конце штанги 10 расположен механический замок, выполненный в виде выступов и предназначенный для сцепления с зацепом конической ниши 4 сцепного устройства 2. Штанга 10 выполнена с возможностью подъема с помощью привода 12 подъема штанги 10. Штанга 10 представляет собой силовой элемент, через который передается буксировочное усилие от самолета-носителя 1 через буксировочный трос 8 и сцепное устройство 2 на БпЛА 3.
Наличие штанги 10 и возможность изменения ее подъема на различную высоту Н обеспечивает расположение точки соединения со сцепным устройством 2 максимально далеко впереди по отношению к центру масс БпЛА 3. В процессе подтягивания БпЛА 3 к самолету-носителю 1 также имеется возможность управления (изменения) высоты подъема штанги 10 и соответственно точки соединения с сцепным устройством 2 точки приложения буксировочного усилия над продольной осью БпЛА 3. Таким образом, привод 12 подъема штанги 10, позволяющий изменять высоту подъема штанги 10, управляемый от системы управления БпЛА 3, является дополнительным органом управления БпЛА 3 по высоте (наряду с аэродинамическим рулем высоты БпЛА), что обеспечивает возможность управления расстоянием между БпЛА и нижней частью самолета-носителя 1 на завершающем этапе подтягивания БпЛА 3.
При занятии БпЛА 3 положения за сцепным устройством 2 мишень 9 оказывается в поле зрения видеокамеры 6 заднего вида. С этого момента система машинного зрения непрерывно формирует и передает сигнал в систему управления, показывающей отклонение по горизонтали и вертикали мишени 9 от оси визирования 11, сформированной между видеокамерой 6 и мишенью 9. На основании сигнала осуществляется маневрирование сцепного устройства 2. Маневрирование сцепного устройства 2 в воздушном потоке происходит в вертикальном и горизонтальном направлениях (показано стрелками на фиг. 3) с целью обеспечения соосности конической ниши 4 сцепного устройства 2 со штангой 10 БпЛА 3 перед стыковкой. Таким образом, как бы не отклонялся БпЛА 3 от своего положения сцепное устройство 2 автоматически поддерживает свое положение соосным со штангой 10. В случае отхода БпЛА 3 и выхода мишени 9 из поля зрения видеокамеры 6 заднего вида поддержание соосности прекращается, но снова возобновляется при приближении БпЛА 3 в стабильное положение за сцепным устройством 2.
Одновременно, система машинного зрения сцепного устройства 2 формирует сигнал, содержащий информацию о расстоянии от видеокамеры 6 до мишени 9, который непрерывно передается в систему управления сцепного устройства 2 и на борт самолета-носителя 1. На борту самолета-носителя 1 сигнал используется для управления лебедкой 22 буксировочного троса, на которую намотан буксировочный трос 8. Управление лебедкой 22 буксировочного троса может осуществляться вручную экипажем самолета-носителя или автоматически. В зависимости от расстояния между видеокамерой 6 и мишенью 9 осуществляется выбор скорости разматывания или сматывания буксировочного троса 8 на лебедке 22 и выполняется стыковка сцепного устройства 2 со штангой 10.
При стабильном положении БпЛА 3 и соосности его буксировочной штанги 10 с конической нишей 4 сцепного устройства 2, которое достигается вышеуказанным маневрированием сцепного устройства 2, осуществляется стыковка летательных аппаратов.
При попадании штанги 10 в коническую нишу 4 сцепного устройства 2 срабатывает замок на штанге 10, обеспечивая окончательную сцепку БпЛА 3 и сцепного устройства 2. Край конической ниши 4 сцепного устройства 2 имеет мягкую окантовку, которая минимизирует повреждения корпуса БпЛА 3 при возможных соударениях в случае промаха. После окончательной сцепки БпЛА 3 может выключить двигатель и продолжать управляемый полет в состоянии буксировки.
Управление замком штанги 10 осуществляется от системы управления БпЛА 3, что позволяет БпЛА 3 в любой момент отцепиться и продолжить автономный полет. В аварийных случаях, при повреждении БпЛА 3 и невозможности безопасно вернуть его на борт самолета-носителя 1, самолет-носитель 1 имеет возможность сбросить БпЛА 3 вместе со сцепным устройством 2 или его частью.
Дополнительно на самолет-носитель 1 передается сигнал, содержащий видеоизображение с видеокамеры 6 заднего вида до мишени 9. Этот видеосигнал не является обязательным для функционирования системы, а служит для контроля со стороны экипажа самолета-носителя 1. Таким образом, при наличии радиопомех и пропадании видеосигнала, система остается работоспособной. Поскольку при использовании проводного или оптического способа передачи вышеуказанного сигнала какое-либо радиоизлучение стыковочной системой при выполнении возвращения БпЛА на борт самолета-носителя может быть полностью исключено. На начальном этапе отработки системы, до полной реализации автоматических алгоритмов, видеосигнал может быть использован экипажем самолета-носителя для ручного дистанционного управления маневрированием сцепного устройства 2 с целью достижения соосности со штангой 10.
После стыковки БпЛА 3 со сцепным устройством 2 возможно осуществление его буксировки, дозаправки или возвращения на борт самолета-носителя 1. В случае возвращения БпЛА 3 на борт самолета-носителя 1 начинается процесс подтягивания БпЛА 3 и его фиксации на борту самолета-носителя 1 для чего задействуются дополнительные элементы стыковочной системы.
Стыковочная система включает размещенные на самолете-носителе 1 элементы, а именно: сцепное устройство 2, буксировочный трос 8, лебедку 22 буксировочного троса, два конформных захвата 13, и рычажную систему 16. Конформные захваты 13 повторяют форму верхней части корпуса БпЛА 3, имеют скругленные углы и мягкую обшивку поверхности, контактирующую с корпусом БпЛА 3. На каждом из конформных захватов 13 расположены замок 14 и задний крюк 15. Конформные захваты 13 шарнирно закреплены на рычажной системе 16. Рычажная система 16 состоит из рычагов и переходных балок, закрепленных на корпусе самолета-носителя 1. На переходных балках расположены четыре замка 17, предназначенных для крепления конформных захватов 13 в сложенном положении. Лебедка 21 притягивания БпЛА 3 к самолету-носителю 1 имеет два троса 20, которые через блоки, закрепленные на переходных балках, подсоединены к конформным захватам 13. Рычажная система 16 в процессе притягивания конформных захватов 13 с помощью тросов 20 лебедки 21 притягивания, складывается и подводит конформные захваты 13 к замкам 17 крепления, расположенным на переходных балках. На БпЛА 3 расположены следующие элементы стыковочной системы: штанга 10, привод 12 штанги, две задние такелажные петли 18 и две передние такелажные петли 19, заглубленные в корпус БпЛА 3. Задние крюки 15 конформных захватов 13 входят в задние такелажные петли 18 БпЛА 3. Замки 14 соединяются с передними такелажными петлями 19. Крепление такелажных петлей 18 и 19 с задними крюками 15 и замками 14 конформных захватов 13 обеспечивает фиксацию БпЛА 3 в четырех точках.
Процесс подтягивания БпЛА к самолету-носителю осуществляется, когда двигатель БпЛА выключен. Управление БпЛА выполняется в автоматическом режиме с помощью системы управления БпЛА аэродинамических рулей и привода изменения высоты подъема штанги. Алгоритм работы системы управления БпЛА обеспечивает его стабилизацию в воздушном потоке и заданное расстояние до нижней части самолета-носителя, которое может измеряться любым способом аппаратурой, имеющейся на БпЛА. В одном из вариантов выполнения на корпус самолета-носителя может быть нанесена разметка, с которой будет взаимодействовать оптическая аппаратура БпЛА. При этом расстояние до нижней части самолета-носителя будет являться функцией от положения БпЛА относительно корпуса самолета-носителя в продольном направлении. При достижении положения БпЛА под конформными захватами относительно корпуса самолета-носителя в продольном направлении, система управления БпЛА начинает уменьшать расстояние до нижней части самолета-носителя и, таким образом, корпус БпЛА входит в соприкосновение с захватами. Управление положением БпЛА относительно корпуса самолета-носителя в продольном направлении выполняется с помощью лебедки 22 буксировочного троса путем разматывания буксировочного троса 8, автоматически или вручную. Вручную разматывание буксировочного троса осуществляется экипажем самолета-носителя на основании информации, полученной с камер видеонаблюдения. При разматывании буксировочно троса 8, БпЛА сдвигается назад относительно корпуса самолета-носителя и система управления отводит БпЛА вниз. При сматывании буксировочного троса 8, БпЛА сдвигается вперед относительно корпуса самолета-носителя до положения, при котором система управления подводит БпЛА вверх до вхождения в зацепление с захватами. В случае неудачного зацепления (элементов стыковочной системы), разматывание буксировочного троса 8, сопровождающееся отводом БпЛА вниз, или сматывание буксировочного троса 8, сопровождающееся подводом БпЛА вверх, может быть многократно повторено. Возможность осуществления такого процесс особенно важно для первоначальной отладки алгоритмов системы управления БпЛА, которое должно быть выполнено для различных высот и скоростей стыковки, и в зависимости от остаточной массы БпЛА после выполнения им задания.
На фиг. 6 показано расположение БпЛА 3 под конформными захватами 13, которое достигается при помощи сматывания буксировочного троса 8, при этом сцепное устройство 2 проходит между конформными захватами 13. Для достижения такого положения БпЛА используются аэродинамический руль БпЛА и управление высотой подъема штанги 10, управляемой с помощью привода 12. Применение всех органов управления БпЛА в сочетании позволяет держать БпЛА 3 на требуемом для сцепления расстоянии от самолета-носителя 1 и от выпущенных конформных захватов 13.
На фиг. 7 показано центрирование корпуса БпЛА при его соприкосновении с конформными захватами 13, которое происходит при движении БпЛА вверх, выполняемое путем одновременного управления аэродинамическим рулем высоты БпЛА 3, приводом 12 штанги 10 и приводом лебедки 22 буксировочного троса 8.
Далее происходит проскальзывание корпуса БпЛА 3 в конформных захватах 13 до входа задних крюков 15 в задние такелажные петли 18 БпЛА (фиг. 8). Передние такелажные петли 19 заглублены в корпус БпЛА 3 и поэтому не препятствуют вышеуказанному проскальзыванию корпуса БпЛА 3 в конформных захватах 13. БпЛА 3 фиксируется в конформных захватах 13 замками 14 закрепленными в передние такелажные петли 19 и задними крюками 15 заведенными в задние такелажные петли 18 в четырех точках.
После сцепления БпЛа и конформных захватах выполняется притягивание конформных захватов 13 с закрепленным на них БпЛА к корпусу самолета-носителя с помощью тросов 20 лебедки 21 притягивания. В результате чего осуществляется складывание рычажной системы 16 и окончательная фиксация конформных захватов 13 с БпЛА замками 17 крепления к переходным балкам самолета носителя.
В случае необходимости, например при расположении стыковочной системы во внутреннем отсеке самолета-носителя, аэродинамические поверхности БпЛА могут быть выполнены складываемыми, и скалываться перед началом притягивания.
Для запуска БпЛА 3 с борта самолета носителя 1 применяется один из двух способов: быстрый сброс и постепенное отделение. Для начала запуска освобождаются замки 17 крепления и конформные захваты 13 с БпЛА опускаются вниз на тросах 20 лебедки притягивания 21 до полного раскладывания рычажной системы 16, после чего освобождаются замки 14. Для осуществления быстрого сброса, система управления БпЛА одновременно с освобождением БпЛА 3 от конформных захватов 13 открывает замок штанги 10 и БпЛА 3 расстыковываются со сцепным устройством 2. БпЛА 3 переводится в полетную конфигурацию и запускает двигатель уже свободном падении. Для осуществления постепенного отделения путем разматывания буксировочного троса 8 производится управляемый постепенный отвод БпЛА 3 от борта самолета-носителя 1, с переводом БпЛА в полетную конфигурацию, запуском двигателя и последующим открытием замка штанги 10, при готовности БпЛА 3 к отделению.
Таким образом, стыковочная система, включающая сцепное устройство в виде малого буксируемого автоматического летательного аппарата, раскрытой выше конструкции, а также способ стыковки летательных аппаратов позволяют эффективно выполнять быструю и безопасную стыковку двух летательных аппаратов в воздухе, а также возвращение БпЛА на борт самолета-носителя. Такие процессы могут выполняться в сложных метеоусловиях и ночью, а также в условиях воздействия радиопомех, не требуют высокого профессионального мастерства пилота стыкуемых летательных аппаратов, позволяет снизить влияние человеческого фактора на процесс стыковки. В частности, группа изобретений позволяет реализовать полностью автоматическую стыковку без участия человека.
| название | год | авторы | номер документа |
|---|---|---|---|
| БЕСПИЛОТНЫЙ СКОРОСТНОЙ ВЕРТОЛЕТ, ДЕСАНТИРУЕМЫЙ С САМОЛЕТА-НОСИТЕЛЯ | 2016 |
|
RU2627975C2 |
| УДАРНО-БОЕВОЙ АВИАЦИОННЫЙ КОМПЛЕКС | 2021 |
|
RU2778159C1 |
| МНОГОЭЛЕМЕНТНЫЙ РАКЕТНО-АВИАЦИОННЫЙ КОМПЛЕКС | 2021 |
|
RU2769000C1 |
| СПОСОБЫ ВЗЛЕТА И ПОСАДКИ ЛЕТАТЕЛЬНЫХ АППАРАТОВ И ВЗЛЕТНО-ПОСАДОЧНАЯ СИСТЕМА ДЛЯ ОСУЩЕСТВЛЕНИЯ ЭТИХ СПОСОБОВ | 2010 |
|
RU2466913C2 |
| СПОСОБ ФОРМИРОВАНИЯ МАЛОЗАМЕТНОЙ МОДУЛЬНОЙ БЕСПИЛОТНОЙ ЛЕТАТЕЛЬНОЙ СИСТЕМЫ | 2023 |
|
RU2829915C1 |
| Многофункциональная летающая лаборатория (МФЛЛ) на базе транспортного самолета | 2020 |
|
RU2734170C1 |
| ВОЗДУХОПЛАВАТЕЛЬНЫЙ ЭЛЕКТРОПОЕЗД | 2017 |
|
RU2734559C2 |
| ТЯЖЕЛЫЙ СКОРОСТНОЙ ВИНТОКРЫЛ | 2016 |
|
RU2608122C1 |
| АВИАЦИОННЫЙ КОМПЛЕКС ВЕРТИКАЛЬНОГО ВЗЛЕТА | 2014 |
|
RU2582743C1 |
| Система посадки беспилотного летательного аппарата самолетного типа | 2017 |
|
RU2678408C1 |
Изобретение относится к области авиации. Сцепное устройство представляет собой малый буксируемый автоматический летательный аппарат (2), включающий корпус, коническую нишу с зацепом (4), аэродинамические поверхности (5) с электрическими приводами, источник светового сигнала (7), систему управления, систему машинного зрения с видеокамерой заднего вида (6), информационный канал связи и источник электропитания. Коническая ниша с зацепом (4) расположена в задней части корпуса. Аэродинамические поверхности (5) расположены на корпусе и выполнены с возможностью управления положением сцепного устройства в воздушном потоке. Достигается повышение быстроты, надежности, простоты и безопасности стыковки летательных аппаратов. 3 н. и 1 з.п. ф-лы, 8 ил.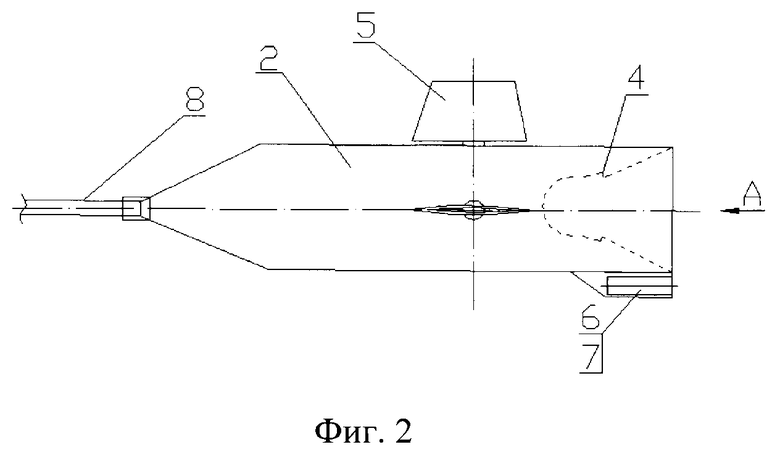
1. Сцепное устройство, предназначенное для стыковки летательных аппаратов, представляющее собой малый буксируемый автоматический летательный аппарат, включающий корпус, коническую нишу с зацепом, расположенную в задней части корпуса, аэродинамические поверхности с электрическими приводами, расположенные на корпусе и выполненные с возможностью управления положением сцепного устройства в воздушном потоке, источник светового сигнала, систему управления, систему машинного зрения с видеокамерой заднего вида, информационный канал связи и источник электропитания.
2. Стыковочная система, включающая сцепное устройство по п. 1, буксировочный трос, лебедку буксировочного троса, штангу с механическим замком, предназначенную для сцепления с зацепом конической ниши в корпусе сцепного устройства, привод штанги, обеспечивающий управление высотой подъема штанги, мишень, выполненную в виде источника светового сигнала и разметки, расположенную на штанге, и предназначенную для взаимодействия с системой машинного зрения сцепного устройства.
3. Стыковочная система по п. 2, дополнительно содержащая рычажную систему, имеющую замки крепления, конформные захваты, шарнирно закрепленные на рычажной системе и имеющие замки и задние крюки, передние и задние такелажные узлы, предназначенные для сцепления с замками и задними крюками конформных захватов.
4. Способ стыковки летательных аппаратов с помощью стыковочной системы по п. 3, характеризующийся тем, что содержит последовательно выполняемые этапы: выпуск сцепного устройства по п. 1 на буксировочном тросе с самолета носителя, стабилизацию сцепного устройства, с помощью аэродинамических поверхностей и системы управления, обеспечение соосности сцепного устройства и штанги стыкуемого летательного аппарата, с помощью системы управления сцепного устройства, стыковку сцепного устройства и летательного аппарата, подтягивание летательного аппарата к самолету-носителю с управлением летательного аппарата, в том числе изменением высоты подъема штанги, сцепление летательного аппарата с конформными захватами путем центрирования и проскальзывания корпуса летательного аппарата в захватах до входа задних крюков захватов в задние такелажные петли летательного аппарата с последующим закрытием замков на передних такелажных петлях летательного аппарата, притягивание захватов с летательного аппарата к корпусу с одновременным складыванием рычажной системы, окончательную фиксацию захватов с летательного аппарата замками, подтягивание летательного аппарата на борт самолета-носителя.
| Василий Сычев | |||
| "Испытания по отлову "гремлинов" в воздухе завершились неудачей", https://nplus1.ru/news/2020/12/11/gremlins, 11.12.2020 | |||
| БЕЗАЭРОДРОМНЫЙ АВИАЦИОННЫЙ КОМПЛЕКС | 2015 |
|
RU2591115C1 |
| УСТРОЙСТВО ДЛЯ БУКСИРОВКИ ГИБКОЙ СИСТЕМЫ | 1989 |
|
SU1753669A1 |
| US 9227735 B2, 05.01.2016 | |||
| US 2016075441 A1, 17.03.2016. | |||

