Область техники
Изобретение относится к области авиации, в частности, к методам исследований и испытаний систем автоматического управления (САУ) дозаправкой летательных аппаратов (ЛА) топливом в полете по типу «шланг-конус», осуществляющих управление следующими объектами: заправщик, заправляемый ЛА (ЛА-приемник) и заправочное устройство (ЗУ). При этом САУ представляет собой замкнутый контур, включающий сразу все эти объекты управления.
САУ дозаправкой ЛА предназначена для осуществления всех этапов дозаправки в воздухе в автоматическом режиме (без вмешательства пилота или оператора ЛА), а именно:
1) поиск и выведение ЛА-приемника в область дозаправки на основе данных телеметрии (ТМ) и спутниковой навигационной системы (СНС);
2) поиск и наведение ЛА-приемника на ЗУ и осуществление стыковки с ним;
3) стабилизация взаимного положения заправщика и ЛА - приемника во время осуществления перекачки топлива;
4) безопасный отвод ЛА-приемника из зоны дозаправки.
Ввиду того, что существует ряд проблем, препятствующих созданию САУ дозаправкой ЛА, таких как: слабая стабилизация шланговой системы с ЗУ в возмущенном потоке для обеспечения его стыковки с ЛА - приемником, система измерений при автоматическом наведении ЛА-приемника на ЗУ не имеет достаточного уровня быстродействия и сложность обеспечения высокого уровня стабилизации взаимного положения ЛА - приемника относительно заправщика и ЗУ и во время осуществления этапов дозаправки, задача разработки САУ дозаправкой в воздухе до сих пор не решена, а имеющиеся образцы имеют ограниченный диапазон применения. Вследствие этого до сих пор проводятся исследования по данной тематике с применением численного моделирования, различных стендов и летных экспериментов (ЛЭ).
Уровень техники
В настоящее время большинство направлений работ по совершенствованию и улучшению эксплуатационных возможностей ЛА направлено на автоматизацию их базовых функций. Это веяние коснулось также и вопроса автоматизации дозаправки ЛА топливом в воздухе. При этом контур САУ дозаправкой в воздухе создается как для пилотируемых аппаратов, так и беспилотных.
В исследованиях по созданию САУ дозаправкой ЛА в воздухе можно выделить четыре основных направления:
- аэродинамическое взаимодействие двух самолетов (особенно турбулентный след танкера);
- динамика движения шланга и конуса;
- система автоматического управления для дозаправки топливом;
- испытания и эксперименты, связанные с практическим применением автоматической дозаправки для БПЛА.
Вследствие того, что летный эксперимент требует больших материальных затрат, проводят максимальное количество исследований с помощью математического моделирования, стендов натурного и полунатурного моделирования, аэродинамических труб (АТ). Эти же методы применяются при исследовании дозаправки самолета в воздухе.
Большинство работ по исследованию дозаправки в воздухе проводится с помощью полунатурного моделирования на вычислительных стендах СПНМ (стенд полунатурного моделирования). На этих стендах отрабатывается динамика заправочной системы, включающей заправщик, систему шланг-конус, а также динамику движения ЛА - приемника. В частности, на таких стендах были разработаны комбинированные системы наблюдения, отработаны алгоритмы обработки информации, поступающие в систему технического зрения и спутниковую навигационную систему (СНС). В части управления были отработаны адаптивные системы, включаемые в контур управления ЛА - приемника. Моделирование дозаправки в воздухе имеет ту особенность, что необходимо вводить в математическую модель движения сразу несколько объектов. Кроме того, в моделях учитываются турбулентные возмущения воздушного потока.
Например, в работе Чеглакова Д.И., Орлова С.В. «Алгоритм комплексной системы управления самолета МиГ-29К/КУБ в режиме «дозаправка топливом в полете», электронный журнал «Труды МАИ», 2011, выпуск №45, при отработке алгоритма новой цифровой комплексной системы управления (КСУ) в режиме дозаправки проводились, кроме ЛИ, математическое и полунатурное моделирование. Согласно этой статье, отработка режима дозаправки самолета МиГ-29К/КУБ в воздухе выполнялась на моделирующем комплексе, включающем в себя:
- полноразмерный стенд системы управления (ПРСУ) и гидрогазовых систем самолета МиГ-29К/КУБ; кабина стенда в части органов управления, многофункциональных индикаторов (МФИ), пультов и переключателей, относящихся к системам КСУ, СОС (система ограничивающих сигналов) и гидросистеме полностью соответствовала самолетной;
- комплекты КСУ и СОС, полностью соответствующие установленным на борту;
- вычислительный комплекс, обеспечивающий реализацию математической модели динамики движения самолета, визуализацию закабинного пространства на всех этапах полета от взлета до посадки при аэродромном и корабельном базировании; в первой кабине стенда на трех МФИ и информационно подобной модели выводится вся необходимая пилотажно-навигационная информация, вид и представление которой соответствует самолетной.
Система имитации визуальной обстановки позволяет отрабатывать режим дозаправки самолета в воздухе. Для этого предназначена визуальная модель самолета-заправщика Ил-78, а также визуальная модель штанги дозаправки. Обеспечивается имитация разных условий видимости (день - ночь). При проведении моделирования производилось варьирование:
- различных скоростей и режимов полета самолета-заправщика (горизонтальный полет, разворот с заданным креном, изменение высоты с заданной скоростью);
- движений и колебаний конуса, возмущений от самолета-заправщика.
Математическая модель включала в себя процесс сцепки, совместного движения и расцепки заправочной штанги с конусом. То есть, моделировался один из нескольких этапов процесса дозаправки в воздухе.
В результате совершенствования метода моделирования был разработан алгоритм динамических «подпоров». В соответствии с этим алгоритмом по команде «Штанга выпущена» запоминаются значение стабилизатора и положение РУС (ручки управления самолетом) по тангажу. В дальнейшем эти значения используются в качестве «нулевых» (опорных) значений РУС и стабилизатора. В таком варианте алгоритм был отработан на стенде, а затем реализован в программном обеспечении КСУ и проверен в ходе летных испытаний.
После проведения полунатурного моделирования проводились летные испытания (ЛИ). В процессе дозаправки были выявлены особенности поведения самолета и системы управления. По результатам обработки данных ЛИ была проведена доработка математической модели самолета МиГ-29К/КУБ.
По оценкам летного состава, выполнявшего полеты с дозаправкой на самолетах МиГ-29К/КУБ и на ПРСУ самолета МиГ-29К/КУБ, имитация реальных условий полета выполнена достаточно хорошо. Эти дополнения к математической модели самолета позволили разработать и отладить уточненные алгоритмы дозаправки для самолета МиГ-29К/КУБ.
По результатам летных испытаний алгоритм был серьезно доработан, что позволило избавиться от всех недостатков, выявленных в летных испытаниях. Перестройка алгоритмов управления в продольном и боковом каналах управления происходит при выпуске штанги дозаправки.
Для проверки алгоритма проводилось полунатурное моделирование на ПРСУ самолета МиГ-29К/КУБ с участием летчиков. Летчиками производился процесс стыковки с самолетом-заправщиком в следующих режимах:
- горизонтального полета на скоростях 400-600 км/ч и высотах 500-8000 м;
- разворота с креном до 15 градусов;
- маневрирования с вертикальной скоростью до ± 15 м/с;
- с колебаниями и движением конуса;
- ночной дозаправки;
- со спутной струей от самолета-заправщика.
Результаты полунатурного моделирования с участием летчиков подтвердили, что КСУ-941(941УБ) в режиме дозаправки обеспечивает процесс подхода к конусу с последующим контактированием. Все летчики отметили значительное улучшение управляемости самолета в режиме дозаправки, упрощения процесса контактирования. Повторные летные испытания на самолете МиГ-29К/КУБ подтвердили результаты математического и полунатурного моделирования. Управляемость самолета в режиме дозаправки значительно улучшилась. Влияние внешних возмущающих факторов было сведено к минимуму. Летчики особенно отметили комфортность управления самолетом при подходе к конусу.
Таким образом, посредством сочетания математического, полунатурного моделирования на ПРСУ с летными испытаниями был получен новый алгоритм дозаправки топлива в воздухе, который по сравнению с ранее использовавшимися алгоритмами дозаправки на самолетах МиГ и других отечественных самолетах расширил возможности автоматизации процесса дозаправки.
Описанная система управления является все же полуавтоматической, поскольку САУ в виде отдельного блока внедрена в систему ручного управления и улучшает качество управления во время процесса дозаправки.
Полностью автоматическая система должна представлять собой замкнутый контур управления положением не только заправляемого ЛА, но и других объектов управления во время осуществления дозаправки - заправщика и заправочного устройства шланговой системы. При других способах организации автоматизации процесса дозаправки летчик ЛА - приемника не освобождается от участия в процессе дозаправки в связи с тем, что автоматика обрабатывает только предсказуемые возмущения, а то, как перестраивать параметры алгоритма при изменениях положения объектов управления под влиянием случайных возмущений широкого диапазона действия до сих пор неизвестно.
В диссертации на соискание ученой степени Доктора Философии Стива Баллока «Cooperative Control for Automated Air-to-Air Refuelling», Бристольский Университет (Великобритания), Технический Факультет, 2017, описан стенд, который имитирует движение системы «шланг - конус» в потоке. Одна часть стенда посредством механического манипулятора имитирует движение ЛА - приемника на основе агрегатов и кабины самолета Harier. Эта часть стенда оборудована поворотной штангой. Технический узел стенда, имитирующий колебания конуса, оборудован механическим вибратором. Для моделирования воздействия воздушного потока две части стенда - имитатор системы «шланг - конус» и имитатор ЛА - приемника могут быть установлены в зоне действия аэродинамической трубы, производящей обдув экспериментальной установки. Разработчики стенда заявляют об удовлетворительной точности выполнения условий полета на стенде.
Однако применение аэродинамических труб (АТ) для имитации набегающего турбулентного потока весьма ограничено, так как АТ не может в полной мере смоделировать природную турбулентность. Следует также отметить, что описанный стенд является достаточно дорогим оборудованием, а также дорогостоящим является его обслуживание.
В патенте Shi Xiaojun, Xu Yangfan, Wu Junqiang, «Air refueling simulation test device and method based on wind tunnel» («Способ и испытательное оборудование для моделирования дозаправки в воздухе с применением аэродинамической трубы»), CN 14476122A, 29.08.2023, описывается влияние на аэродинамические характеристики заправляемого самолета спутного следа от танкера, которое изучалось на основе продувок в АТ. Здесь был предложен способ исследования одной из фаз процесса дозаправки в воздухе, а именно, динамического поведения гибкого шланга с конусом при сближении заправляемого ЛА с танкером с помощью испытательного устройства, устанавливаемого в АТ. Экспериментальное устройство и способ моделирования дозаправки в воздухе в АТ рассчитаны на диапазон чисел М=0,5 - 0,7.
Устройство включает в себя: модель заправщика (танкера), гибкий заправочный шланг, заправочный конус и подвижный механизм. При этом один конец заправочного шланга соединен с моделью заправщика, а другой конец - с заправочным конусом. Подвижный механизм используется для управления расстоянием и углом между моделью топливоприемника и заправочным конусом, чтобы реализовать постепенное сближение топливоприемного порта (отверстия) модели топливоприемника и заправочного конуса, пока они не будут состыкованы.
В топливоприемном отверстии и в заправочном конусе установлены магниты противоположной полярности. При сближении отверстия и конуса они будут взаимно притягиваться друг к другу.
Передняя часть модели топливоприемника оборудована камерой, которая во время моделирования снимает заправочный конус в режиме реального времени. Это позволяет получить изображение пространственного положения заправочного конуса при динамическом моделировании стыковки и передать его на главный компьютер в режиме реального времени по линии передачи сигнала.
Задний конец модели топливоприемника соединен с кинематическим механизмом, который реализует модель динамического движения топливоприемника с шестью степенями свободы - вперед и назад, вверх и вниз, влево и вправо, пока топливоприемное отверстие модели ЛА - приемника постепенно не приблизится и не состыкуется с заправочным конусом.
На поверхности заправочного шланга маркируется несколько точек - меток, устанавливается число Маха в аэродинамической трубе. Встроенная камера модели ЛА - приемника передает изображение пространственного положения заправочного конуса на главный компьютер в режиме реального времени. На основе соотношений динамического баланса модели танкера пересчитываются аэродинамические характеристики танкера в режиме реального времени и также передаются на главный компьютер через линию связи. Согласно управлению от главного компьютера, кинематический механизм модели приемника регулирует расстояние и угол между моделью приемника и заправочным конусом. Используя изображения одной и той же отмеченной точки на шланге, полученные с помощью двух или более камер, применяют технологию обработки видеоизображения для вычисления координат пространственного положения этой отмеченной точки. Камеры расположены в боковом окне испытательного участка аэродинамической трубы. Представление о динамическом поведении топливного шланга дает совокупность пространственных координат промаркированных точек шланга, изменяющихся в процессе сближения заправляемого ЛА с танкером.
Описанный способ моделирования связан с применением АТ, что означает невозможность смоделировать природную турбулентность случайного характера и нестационарные виды аэродинамических возмущений. К тому же в патенте не указан способ управления моделью ЛА - приемника и шланговой системой: является ли он автоматизированным или ручным.
Ввиду того, что моделирование процессов работы САУ дозаправкой известными способами имеет ряд недостатков, упомянутых выше, а именно: для ЛЭ - высокая стоимость проведения, для моделирования с АТ - недостаточная степень достоверности получаемых результатов по сравнению с результатами, получаемыми в натурных условиях, для полунатурного моделирования на СПНМ - ограниченность применимости математической модели к реальным условиям, существует необходимость создания стендов, предназначенных для моделирования дозаправки в условиях натурного эксперимента.
Предлагается технология разработки и испытаний системы автоматического управления (САУ) дозаправкой летательных аппаратов в воздухе без проведения большого количества летных испытаний этой системы, что позволит существенно сократить материальные затраты на весь цикл работ. Применение ее относится к ЛА беспилотного типа (дистанционно и опционно управляемых и автономных) и пилотируемым авиационным комплексам с автоматизацией базовых функций. При этом экономия материальных средств может составлять до 90% за счет переноса большого количества испытаний на наземные стенды.
Принцип изобретения основан на использовании наземного подвижного стенда, представляющего собой два автомобиля, имитирующих относительное движение воздушного заправщика и ЛА - приемника, оборудованных специальным образом для поддержки работы экспериментальной САУ, имитирующей работу САУ дозаправкой в воздухе. Экспериментальная САУ, в свою очередь, устанавливается на объекты управления - заправщик, заправляемый ЛА и заправочное устройство.
САУ дозаправкой в воздухе представляет собой замкнутый контур, объединяющий все эти объекты управления, поскольку в процессе дозаправки необходимо обеспечивать стабилизацию взаимного положения заправщика, заправляемого ЛА и заправочного устройства в их движении относительно друг друга.
При испытаниях на наземном стенде должно быть обеспечено полное соответствие результатов моделирования и результатов, получаемых в реальных условиях дозаправки, что возможно достичь за счет обеспечения масштабируемости условий проведения испытаний на наземном стенде с условиями в реальном полете. Масштабируемость можно соблюсти через соответствие основных параметров аэродинамического и динамического подобия. В частности, необходимо соблюдать подобие по числам Рейнольдса и по перегрузкам, получаемым при моделировании и в реальных условиях.
Технический результат, на достижение которого направлены предлагаемые изобретения, заключается в расширении арсенала технических средств наземных стендовых испытаний системы автоматического управления дозаправкой в воздухе и реализации нового способа проведения таких испытаний. Патентуемый стенд достаточно экономичен и позволяет интенсифицировать работы по исследованию аэродинамических и динамических явлений, наблюдаемых при дозаправке, а также по отработке макетного образца САУ дозаправкой. Стенд позволяет имитировать процессы, наблюдаемые при дозаправке, без проведения ЛЭ.
Поставленная задача решается тем, что используется наземный подвижный стенд (НПС) для испытаний системы автоматического управления (САУ) дозаправкой в воздухе, содержащий имитатор ЛА - заправщика, имитатор заправляемого ЛА (ЛА - приемника), систему измерений, отличающийся тем, что имитатор ЛА - заправщика выполнен в виде автомобиля с тросовым подвесом для транспортировки масштабируемой модели заправочного устройства (ЗУ), имитирующим движение шланговой системы дозаправки, имитатор заправляемого ЛА (ЛА - приемника) выполнен в виде автомобиля, на котором находится подвижная штанга с системой управления ее положением, моделирующая движение планера ЛА - приемника.
Кроме того, НПС дополнительно содержит: наземный пункт управления экспериментом (ПУЭ); экспериментальную систему автоматического управления (САУ), имеющую в своем составе: вычислитель опорных траекторий от текущего положения имитатора ЛА - приемника до вычисленной точки сближения с имитатором ЛА - заправщика; системы бортовых измерений (СБИ) автомобилей -имитаторов ЛА - заправщика и ЛА - приемника, интерфейсы передачи данных в контур САУ из СБИ, первый радиоцелеуказатель (РЦУ1) для слежения за положением модели ЗУ, которое определяется положением первого радиомаяка, установленного на модели ЗУ, второй радиоцелеуказатель (РЦУ2) для слежения за положением подвижной штанги в кузове имитатора ЛА - приемника посредством пары вторых радиомаяков, установленных на штанге, третий радиоцелеуказатель (РЦУ3) для слежения с борта имитатора ЛА - заправщика за положением имитатора ЛА - приемника посредством третьего радиомаяка на борту имитатора ЛА - приемника; средства связи для передачи данных СБИ и первого - третьего РЦУ1 - РЦУ3 с борта имитатора ЛА - заправщика на имитатор ЛА - приемника в контур САУ, а также для передачи данных с имитаторов ЛА - заправщика и ЛА -приемника на наземный ПУЭ, блок формирования управляющих сигналов для перемещения подвижной штаги, исполнительный механизм перемещения штанги, видеокамеру, расположенную на подвижной штанге для контроля положения штанги относительно модели ЗУ, твердотельные накопители для сохранения информации на бортах имитаторов ЛА - заправщика и ЛА - приемника и информации, получаемой в процессе эксперимента с помощью СБИ и вычислителя САУ.
При этом исполнительный механизм перемещения штанги содержит: поворотную складную стойку, подъемно-поворотный и подъемно-поступательный механизмы перемещения штанги по курсу и по высоте с приводами, обеспечивающими изменение положения штанги по высоте и угловому положению относительно главной строительной оси автомобиля, контроллеры приема сигналов из контура САУ через интерфейсы взаимодействия с цифро-аналоговыми преобразователями (ЦАП) и драйверы, выдающие сигналы на приводы, систему электропитания контроллеров ЦАП, драйверов и двигателей подъемно-поворотного и подъемно-поступательного механизмов.
Также система измерений, установленная на автомобиле-имитаторе ЛА -заправщика содержит: СБИ имитатора ЛА - заправщика для определения его положения относительно земли, а именно, средства внешнетраекторных измерений - спутниковую навигационную систему (СНС), инерциальную навигационную систему (ИНС); первый, второй и третий приемные блоки радиоцелеуказателей РЦУ1, РЦУ2, РЦУ3 соответственно для слежения за положением модели ЗУ, для слежения за положением подвижной штанги на имитаторе ЛА - приемника, для слежения за положением имитатора ЛА -приемника, первый радиомаяк на модели ЗУ для обнаружения модели ЗУ и измерения с помощью РЦУ1 ее координат относительно имитатора ЛА -заправщика, средство связи для передачи данных СБИ имитатора ЛА -заправщика и РЦУ1 - РЦУ3 в контур САУ; средство связи для передачи данных СБИ имитатора ЛА - заправщика и РЦУ1 - РЦУ3 на ПУЭ; а система измерений, установленная на автомобиле-имитаторе ЛА - приемника, содержит СБИ имитатора ЛА - приемника для определения его положения относительно земли, а именно, средства внешнетраекторных измерений - СНС, ИНС; средство связи для передачи данных СБИ имитатора ЛА - приемника на ПУЭ.
Кроме того, на автомобиле-имитаторе ЛА - приемника располагается монитор для отображения параметров взаимного положения модели ЗУ, штанги и имитатора ЛА - заправщика водителю имитатора ЛА - приемника.
Способ применения наземного подвижного стенда для испытаний системы автоматического управления дозаправкой в воздухе предусматривает управление относительным перемещением автомобилей имитаторов ЛА - заправщика и ЛА приемника и отличается тем, что имитатор ЛА - заправщика выводится в область проведения эксперимента, после чего включается СБИ автомобиля имитатора ЛА - заправщика и его средство связи с контуром САУ и ПУЭ. Затем автомобиль имитатор ЛА - заправщика перемещается в области проведения эксперимента по маршруту и со скоростным режимом, установленными в ходе предварительного полунатурного моделирования. После этого автомобиль имитатор ЛА -приемника выводится в область проведения эксперимента на основе информации, получаемой по средствам связи от СБИ имитатора ЛА - заправщика; при этом вычислитель опорных траекторий САУ на борту автомобиля имитатора ЛА - приемника производит расчет опорной траектории до текущего положения автомобиля имитатора ЛА - заправщика и дает целеуказание на него; параметры опорной траектории до автомобиля имитатора ЛА заправщика, а именно, координаты по широте и долготе автомобилей имитаторов ЛА - заправщика и ЛА - приемника и их относительная скорость, расстояние до текущего положения автомобиля имитатора ЛА - заправщика, видеоизображение с видеокамеры, закрепленной на штанге, отображаются на мониторе водителю автомобиля -имитатора ЛА - приемника, и на их основе осуществляется маневрирование автомобиля - имитатора ЛА - приемника; одновременно информация и видеоизображение, выводимые на монитор, записываются на твердотельный накопитель для послеэкспериментального анализа работы САУ
После достижения области проведения эксперимента и входа в область видимости автомобиля имитатора ЛА - заправщика СБИ и РЦУ 1-РЦУ3 на борту имитатора ЛА - приемника формируют и выдают их в контур САУ измерения, на основе которых вычислитель опорных траекторий САУ производит вычисление опорных траекторий и в виде цифровой информации отображает их на мониторе; по данным, отображаемым на мониторе, водитель имитатора ЛА - приемника осуществляет управление этим автомобилем в области видимости РЦУ1 - РЦУ3 в соответствии с вычисленной опорной траекторией; при этом в процессе движения автомобилей первый и третий радиомаяки, установленные на модели ЗУ и на автомобиле имитаторе ЛА - приемника, выдают сигналы, которые принимаются и обрабатываются приемными блоками РЦУ1 и РЦУ3 на борту автомобиля имитатора ЛА - заправщика.
Текущее положение подвижной штанги на борту автомобиля имитатора ЛА - приемника определяется с помощью пары вторых радиомаяков РЦУ2, установленных на штанге и вместе с видеокамерой на штанге обеспечивающих контроль положения штанги относительно модели ЗУ. С помощью РЦУ1 - РЦУ3 на автомобиле имитаторе ЛА - заправщика измеряются текущие координаты положения модели ЗУ, штанги и автомобиля имитатора ЛА - приемника, которые передаются через средство связи совместно с измерениями СБИ автомобиля имитатора ЛА - заправщика в контур САУ на борту автомобиля имитатора ЛА -приемника. Измерения от СБИ автомобиля имитатора ЛА - заправщика и РЦУ1 -РЦУ3 поступают в контур САУ через интерфейсы передачи данных в вычислитель опорных траекторий, который осуществляет определение опорных траекторий до объектов наблюдения - автомобиля имитатора ЛА - заправщика и масштабируемой модели ЗУ и формирует командные сигналы для перемещения подвижной штанги; подвижная штанга на стойке в кузове автомобиля имитатора ЛА - приемника осуществляет перемещение по высоте и курсу по сигналам, получаемым из контура САУ, обеспечивая устранение рассогласований по высоте и курсу положения модели ЗУ и штанги.
На монитор водителя автомобиля имитатора ЛА - приемника выводятся информация, получаемая на основе измерений с СБИ и данных с вычислителя опорных траекторий - удаление, боковое отклонение по курсу и высота модели ЗУ относительно контрольной точки штанги с видеокамерой, а также изображение с видеокамеры, которое одновременно записывается на твердотельный накопитель информации. САУ осуществляет коррекцию скоростного режима и опорной траектории автомобиля имитатора ЛА - приемника относительно положения модели ЗУ с учетом возможных колебаний модели ЗУ относительно автомобиля имитатора ЛА - заправщика на основе измерений первого и третьего радиомаяков и когерентных этим радиомаякам РЦУ1 и РЦУ3, установленных на модели ЗУ, автомобилях имитаторах ЛА - приемника и ЛА - заправщика соответственно; на основе разницы скоростей автомобиля имитатора ЛА - заправщика и модели ЗУ САУ формирует поправки, обеспечивая стабилизацию скоростного режима.
Водитель автомобиля имитатора ЛА - приемника осуществляет, согласно получаемой с монитора информации, маневрирование так, чтобы автомобиль вышел на скоростной режим автомобиля имитатора ЛА - заправщика и на отображаемое на мониторе взаимное положение имитатора ЛА - приемника и модели ЗУ; стабилизация взаимного положения автомобилей имитаторов ЛА -заправщика и ЛА - приемника осуществляется на таком расстоянии друг относительно друга, чтобы модель ЗУ и подвижная штанга не касались друг друга и чтобы взаимное положение имитатора ЛА - приемника и модели ЗУ установилось вдоль фиксированной в пространстве прямой, соединяющей положение первого радиомаяка на модели ЗУ и контрольную точку на штанге с видеокамерой, а главные строительные оси автомобиля имитатора ЛА - приемника и штанги были выставлены параллельно друг другу.
Краткое описание чертежей
На фигуре 1 представлено оборудование наземного подвижного стенда.
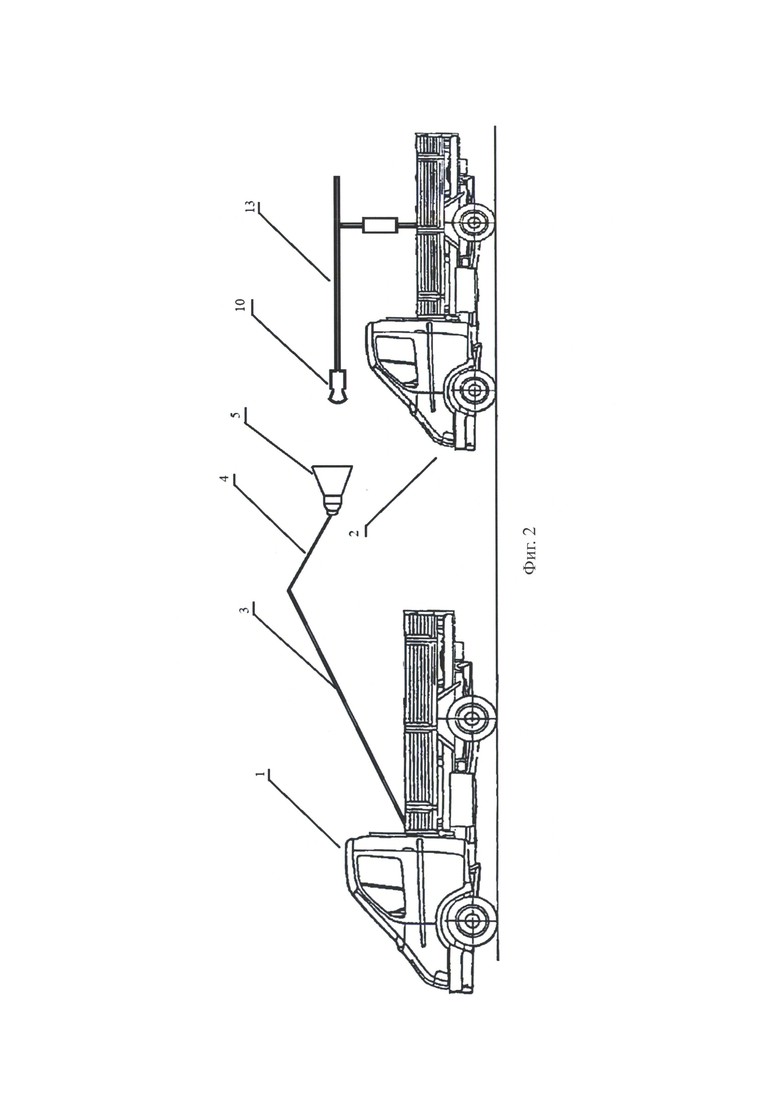
На фигуре 2 представлена схема проведения эксперимента на наземном подвижном стенде.
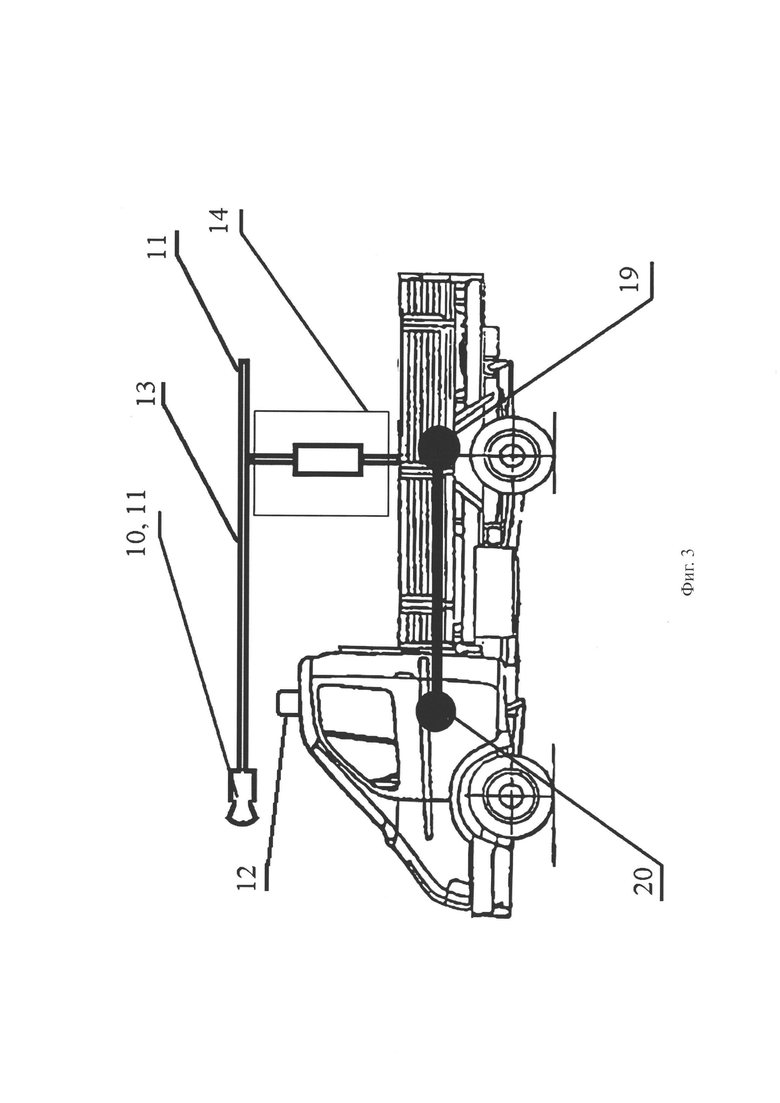
На фигуре 3 изображена оснастка автомобиля имитатора ЛА - приемника.
На фигуре 4 изображена схема функциональных связей контура САУ.
При этом на фигурах 1-4 обозначены следующие позиции:
1 - автомобиль-имитатор ЛА - заправщика;
2 - автомобиль-имитатор ЛА - приемника;
3 - оснастка тросового подвеса;
4 - тросовый подвес;
5 - модель ЗУ;
6 - приемный блок РЦУ2;
7 - приемный блок РЦУ 1;
8 - приемный блок РЦУ3;
9 - первый радиомаяк РЦУ 1;
10 - видеокамера (в контрольной точке штанги);
11 - второй радиомаяк РЦУ2;
12 - третий радиомаяк РЦУ3;
13 - подвижная штанга;
14 - исполнительный механизм подвижной штанги;
15 - СБИ автомобиля имитатора заправщика;
16 - СБИ автомобиля имитатора ЛА - приемника;
17 - интерфейсы приема и передачи данных вычислителя САУ;
18 - монитор водителя автомобиля имитатора ЛА - приемника;
19- интерфейс вычислителя с исполнительным устройством подвижной штанги;
20 - вычислитель экспериментальной САУ;
21 - пункт управления экспериментом.
Раскрытие сущности изобретения
Сущность изобретения заключается в новом методе испытания САУ дозаправкой в воздухе на наземном подвижном стенде, который позволяет моделировать в натурных условиях относительное движение объектов управления - имитаторов заправщика, ЛА - приемника и модели ЗУ. Причем моделирование возможно для любых САУ и не зависит от вида и типа ЛА, на который будет устанавливаться САУ. Предлагаемый метод позволяет сократить объем летных испытаний и общую стоимость работ по доводке САУ дозаправкой в воздухе.
Специальная оснастка автомобиля имитатора ЛА - приемника представляет собой механическую систему с подвижной штангой, которая моделирует движение корпуса ЛА. Сам автомобиль является носителем этой механической системы и задает направление скорости центра масс штанги.
Подвижная штанга представляет собой масштабируемую модель с аналогичными ЛА массово-инерционными свойствами и позволяет в натурных условиях смоделировать траекторное и короткопериодическое движение ЛА без использования аэродинамических труб.
Оснастка автомобиля имитатора ЛА - заправщика представляет собой механическую систему подвеса, имитирующую носитель шланговой системы и саму шланговую систему с ЗУ. Тросовая система подвеса с моделью ЗУ моделируют поведение шланговой системы, а автомобиль - движение заправщика.
В ходе испытаний необходимо отработать функционирование всех технических узлов, входящих в состав САУ дозаправкой. При этом отрабатывается методологическое и алгоритмическое обеспечение этой САУ на макетах и моделях соответствующих узлов, а вместо САУ используется ее макетный образец.
Для обеспечения соответствия получаемых результатов результатам, имеющим место в реальных условиях дозаправки в воздухе, необходимо обеспечить масштабируемость набегающего потока в испытаниях на наземном стенде с набегающим потоком, наблюдаемым при дозаправке. Этого можно достичь обеспечением идентичности чисел Рейнольдса и/или перегрузок, получаемых в натурном моделировании на подвижном стенде и в реальных условиях.
Доводка САУ дозаправкой в воздухе ЛА осуществляется в несколько этапов:
- моделирование на стенде полу натурного моделирования (СПНМ);
- испытание на наземном подвижном стенде;
- летные испытания.
После проведения предварительного моделирования на СПНМ, с учетом полученных результатов производится подготовка к наземным испытаниям на подвижном стенде.
Подготовка к испытаниям подразумевает настройку специального оборудования, аппаратного и программного обеспечения (ПО) экспериментальной САУ (его макетного образца), а также настройку работы объектов управления -автомобиля имитатора ЛА - заправщика и автомобиля имитатора ЛА - приемника, а также масштабируемой модели ЗУ. В ходе предварительных исследований должны быть уточнены аэродинамические характеристики масштабируемой модели ЗУ, установлены диапазоны погрешностей работы всех элементов системы бортовых измерений (СБИ) и системы целеуказаний.
Наземный подвижный стенд (фиг. 1-4) содержит несколько основных элементов: автомобиль имитатора ЛА - заправщика (1), автомобиль имитатора ЛА - приемника (2), СБИ на автомобиле имитаторе ЛА - заправщика (15), СБИ на автомобиле имитаторе ЛА - приемника (16), экспериментальную САУ (ее макетный образец) на борту имитатора ЛА - приемника (2), средства связи и коммутации контура САУ, включающие в себя систему беспроводной передачи данных от одного объекта управления к другому, монитор для отображения данных по опорной траектории для водителя автомобиля имитатора ЛА - приемника, оснастку (3) тросового подвеса (4) на автомобиле имитаторе ЛА - заправщика, предназначенного для транспортировки масштабируемой модели ЗУ (9), систему приводов (14) с цифровым управлением (19) подвижной штангой (13) на автомобиле имитаторе ЛА - приемника (2), предназначенную для моделирования управления движения пл анером ЛА - приемника (2).
Автомобиль имитатор ЛА - приемника (2) перевозит на своем борту САУ и сопутствующие ей системы вместе с электромеханической системой перемещения штанги (фиг. 1-3). Последняя система связана посредством интерфейсов с САУ и получает от нее командные (управляющие) сигналы на перемещение штанги. Электромеханическая система приводов (14) представляет собой совокупность следующих технических узлов (фиг. 2, 4):
- интерфейса передачи командных сигналов (17),
- контроллера обработки командных сигналов с ЦАП (19),
- драйверов усиления аналогового сигнала в импульсы большой мощности, достаточных для запуска работы двигателей поворотного и подъемно-поступательного механизмов,
- штанги (13) - имитатора корпуса ЛА, закрепленной на подвижном механизме (14) стойки и имеющей возможность перемещаться по высоте и углу курса,
- подъемно-поворотного и подъемно-поступательного приводных механизмов перемещения штанги по курсу и по высоте, соответственно, с приводами (И),
- стойки, закрепленной в кузове автомобиля имитатора ЛА - приемника (2), относительно которой производится перемещение штанги по высоте и по курсу с помощью приводных механизмов (14),
- системы электропитания для контроллеров ЦАП, драйверов и двигателей подъемно-поворотного и подъемно-поступательного механизмов (14).
На автомобиле имитаторе ЛА - приемника наряду с основными элементами САУ должна присутствовать СБИ (16) в составе СНС и инерциально-навигационной системы (ИНС) для определения параметров движения этого автомобиля. Эта система также интегрирована в контур САУ и выдает в этот контур текущие значения скорости и скоростного угла курса автомобиля имитатора ЛА-приемника.
Автомобиль имитатор ЛА - заправщика (фиг. 1, 3) предназначен для транспортировки масштабируемой модели ЗУ (5) и оснащен тросовым подвесом (4) со специальной оснасткой (3), служащей для закрепления системы подвеса в кузове этого автомобиля (1). Этот автомобиль оборудован также аппаратурой, измеряющей текущие параметры движения и траектории, такие как скорость и скоростной угол курса. Эти измерения производятся с помощью СНС и ИНС, установленных на автомобиле имитаторе ЛА - заправщика (1), которые, в свою очередь, относятся к СБИ (15).
Кроме этого, борт автомобиля (1) содержит несколько систем, входящих в СБИ (15) и контур экспериментальной САУ и предназначенных для определения параметров текущего взаимного положения объектов управления с целью дальнейшего их использования для выработки сигналов, управляющих движениями автомобиля имитатора ЛА - приемника (1) и подвижной штанги и построения опорных траекторий сближения имитатора ЛА - приемника (2) с моделью ЗУ (5) на заданное расстояние. Контакт модели ЗУ (5) с подвижной штангой (13) на имитаторе ЛА - приемника (2) не предусмотрен. Конечная цель - сближение на заданное расстояние.
Для проведения измерений с выдачей их результатов в контур САУ на борту имитатора заправщика (1) установлены приемники (6, 7, 8) радиоцелеуказателей (РЦУ1-РЦУ3), один из которых (6) предназначен для определения удаления и бокового отклонения по курсу, высоты контрольной точки на подвижной штанге, расположенной на имитаторе ЛА - приемника, относительно модели ЗУ (5) (РЦУ2) (фиг. 1). В качестве контрольной точки используется конец подвижной штанги (13), направляемый на модель ЗУ (5), на нем установлен контрольный датчик - видеокамера (10) и второй радиомаяк (11) РЦУ2.
На другом конце штанги также установлен второй радиомаяк (11) РЦУ2, но другой рабочей частоты. Два вторых радиомаяка (11) РЦУ2 разных частот на противоположных концах штанги (13) служат для определения положения штанги в пространстве по углу курса и высоте. Сигналы радиомаяков (11) на концах штанги (13) принимаются и обрабатываются приемным блоком (6) РЦУ2, установленным на автомобиле имитаторе ЛА - заправщика (1). Согласно этим данным и определяются текущие угол курса и положение штанги (13) относительно имитатора ЛА - заправщика (1), и на основе уже этих данных САУ формирует в своем контуре управляющие сигналы для коррекции положения штанги в пространстве с целью ее ориентирования на положение модели ЗУ (5) (фиг. 4). Положение штанги в пространстве должно быть в завершающей фазе управления направлено по линии перемещения модели ЗУ. При этом ориентация штанги должна быть параллельна строительной оси автомобиля имитатора ЛА -приемника (2).
Другая система РЦУ 1 для контура САУ представляет собой систему первого радиомаяка (9) и приемного блока (7), расположенную на автомобиле имитатора ЛА - заправщика (1) (фиг. 1-3). При этом радиомаяк РЦУ 1 располагается на модели ЗУ (5), а его приемный блок (7) находится внутри кузова этого автомобиля. Эта система служит для определения положения модели ЗУ (5) относительно автомобиля имитатора ЛА заправщика (1). Данные, полученные с этой системы слежения, передаются в контур САУ и совместно с данными от другого РЦУ2, связанного с определением текущего положения штанги (13), обрабатываются вычислителем САУ (20), и на основе этого устанавливается взаимное относительное положение модели ЗУ (5) и штанги (13). Согласно этим вычислениям САУ производит управляющие сигналы по изменению положения штанги (13) по направлению к модели ЗУ, которые принимаются исполнительной частью механизма (14) перемещения штанги (13), которая, в свою очередь, и осуществляет выдвижение штанги для парирования рассогласования ее положения по отношению к модели ЗУ по высоте и углу курса (фиг. 4).
Кроме указанных выше РЦУ1, РЦУ2 необходима еще одна система - РЦУ3. Ее маяки (12) располагаются на одном из имитаторов, а приемный блок (8), принимающий от них сигнал - на другом имитаторе (фиг. 1-3). Система работает на определение относительного положения имитаторов по отношению друг к другу и для того, чтобы выдавать это значение в контур САУ вместе с рассогласованием скоростей имитаторов (1, 2) на этапе их выведения на заданное расстояние относительно друг друга.
Применение системы из трех РЦУ в контуре САУ служит для обеспечения стабилизации относительного движения сразу трех объектов управления -автомобилей имитаторов ЛА - заправщика (1) и ЛА - приемника (2) и модели ЗУ (5). При этом производится устранение рассогласования скорости автомобиля имитатора ЛА - приемника (2) относительно скорости автомобиля имитатора ЛА - заправщика (1).
Вычислитель САУ осуществляет расчет по данным, исходя из измерений, получаемых на бортах имитатора ЛА - заправщика и имитатора ЛА - приемника (фиг. 4). Вычислитель САУ вместе с интерфейсами передачи данных, присоединенными к нему, а также системой радиосвязи получения данных с борта автомобиля имитатора ЛА - заправщика (1) располагается на борту автомобиля имитатора ЛА -приемника (2). Таким образом, посредством беспроводной связи через систему радиосвязи производится передача всей измерительной информации, полученной с борта имитатора ЛА - заправщика (1) на борт имитатора ЛА - приемника (2). Вся информация, полученная в контуре САУ, обрабатывается, и производится расчет сразу нескольких параметров:
- скорости автомобиля имитатора ЛА - приемника (2) относительно автомобиля имитатора ЛА заправщика (1),
- скорости модели ЗУ (5) относительно автомобиля имитатора заправщика (1),
- скорости модели ЗУ (5) относительно автомобиля имитатора ЛА - приемника (2),
- дальности контрольной точки штанги (13) по ее курсу до текущего положения модели ЗУ (5),
- бокового отклонения контрольной точки (10) штанги (13) по ее курсу до текущего положения модели ЗУ (5),
- высоты контрольной точки (10) штанги (13) до текущего положения модели ЗУ (5),
- опорной траектории маневра с текущего положения автомобиля имитатора ЛА - приемника, обеспечивающего сближение контрольной точки (10) штанги (13) с моделью ЗУ (5) на заданное удаление со скоростью, равной скорости автомобиля имитатора ЛА - заправщика (1) и с нулевым или близким к нулю боковым отклонением относительно положения модели ЗУ (5) и с углом скоростного курса, равным углу скоростного курса модели ЗУ (5),
- опорной траектории с корректировкой скорости автомобиля имитатора ЛА -приемника (2) относительно модели ЗУ (5) с учетом рассогласования скорости модели ЗУ (5) относительно скорости автомобиля имитатора ЛА - заправщика (1).
Вычислитель САУ (20) определяет опорную траекторию и ее расчетные параметры, такие как скорость и скоростной угол курса, которые отображаются на мониторе (18) водителя автомобиля имитатора ЛА - приемника (2). Согласно этим данным водитель осуществляет необходимый маневр этим автомобилем имитатором ЛА - приемника (2) (фиг. 4).
Вся получаемая в эксперименте информация через средства радиосвязи передается со стенда на пункт управления экспериментом (21), осуществляющий сбор и передачу информации для дальнейшей обработки и анализа.
| название | год | авторы | номер документа |
|---|---|---|---|
| Система дозаправки в воздухе с автоматическим управлением и автостабилизируемым заправочным устройством | 2023 |
|
RU2809164C1 |
| ПОЛУАВТОМАТИЧЕСКАЯ СИСТЕМА УПРАВЛЕНИЯ ТРАЕКТОРНЫМИ ПАРАМЕТРАМИ ПОЛЕТА САМОЛЕТА | 2008 |
|
RU2377158C1 |
| ЛЕТНО-МОДЕЛИРУЮЩИЙ КОМПЛЕКС ИССЛЕДОВАНИЯ ПОСАДОЧНЫХ СИСТЕМ ЛЕТАТЕЛЬНЫХ АППАРАТОВ КОРАБЕЛЬНОГО БАЗИРОВАНИЯ | 1991 |
|
RU2042583C1 |
| СПОСОБ ИНДИКАЦИИ ТЕКУЩЕЙ И ПРОГНОСТИЧЕСКОЙ ИНФОРМАЦИИ В ПРОЦЕССЕ ВОЗДУШНОЙ ДОЗАПРАВКИ ЛЕТАТЕЛЬНОГО АППАРАТА | 2017 |
|
RU2676594C2 |
| Способ полунатурных роботизированных исследований и испытаний систем управления беспилотных воздушных судов вертикального взлета и посадки (БВС ВВП) | 2021 |
|
RU2771692C1 |
| ЛЕТНО-МОДЕЛИРУЮЩИЙ ПИЛОТАЖНЫЙ КОМПЛЕКС | 2006 |
|
RU2310909C1 |
| СИСТЕМА УПРАВЛЕНИЯ ЛЕТНЫМ ЭКСПЕРИМЕНТОМ | 2012 |
|
RU2477521C1 |
| Стенд полунатурного моделирования движения летательного аппарата с цифровой системой управления | 2022 |
|
RU2786280C1 |
| СИСТЕМА АВТОМАТИЗИРОВАННОГО УПРАВЛЕНИЯ САМОЛЕТОМ В ПРОДОЛЬНОМ КАНАЛЕ ПРИ ДОЗАПРАВКЕ В ВОЗДУХЕ | 2022 |
|
RU2833735C2 |
| СИСТЕМА АВТОМАТИЧЕСКОЙ ПОСАДКИ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 2004 |
|
RU2284058C2 |


Изобретение относится к испытаниям систем дозаправки летательных аппаратов. Наземный подвижный стенд (НПС) для испытаний системы автоматического управления (САУ) дозаправкой в воздухе содержит имитатор ЛА-заправщика, выполненный в виде автомобиля (1) с тросовым подвесом (4) для транспортировки масштабируемой модели (5) заправочного устройства (ЗУ), имитирующим движение шланговой системы дозаправки. Имитатор заправляемого ЛА выполнен в виде автомобиля (2), на котором находится подвижная штанга (13) с системой управления ее положением, моделирующая движение планера ЛА-приемника. НПС дополнительно содержит наземный пункт управления экспериментом (ПУЭ) и экспериментальную систему автоматического управления (САУ). Достигается возможность имитации процессов, наблюдаемых при дозаправке, без проведения летных испытаний. 2 н.п. ф-лы, 4 ил. 
1. Наземный подвижный стенд (НПС) для испытаний системы автоматического управления (САУ) дозаправкой в воздухе, содержащий имитатор ЛА-заправщика, имитатор заправляемого ЛА (ЛА-приемника), систему измерений, отличающийся тем, что имитатор ЛА-заправщика выполнен в виде автомобиля с тросовым подвесом для транспортировки масштабируемой модели заправочного устройства (ЗУ), имитирующим движение шланговой системы дозаправки, имитатор заправляемого ЛА (ЛА-приемника) выполнен в виде автомобиля, на котором находится подвижная штанга с системой управления ее положением, моделирующая движение планера ЛА-приемника; кроме того, НПС дополнительно содержит: наземный пункт управления экспериментом (ПУЭ); экспериментальную систему автоматического управления (САУ), имеющую в своем составе: вычислитель опорных траекторий от текущего положения имитатора ЛА-приемника до вычисленной точки сближения с имитатором ЛА-заправщика; системы бортовых измерений (СБИ) автомобилей - имитаторов ЛА-заправщика и ЛА-приемника, интерфейсы передачи данных в контур САУ из СБИ, первый радиоцелеуказатель (РЦУ1) для слежения за положением модели ЗУ, которое определяется положением первого радиомаяка, установленного на модели ЗУ, второй радиоцелеуказатель (РЦУ2) для слежения за положением подвижной штанги в кузове имитатора ЛА-приемника посредством пары вторых радиомаяков, установленных на штанге, третий радиоцелеуказатель (РЦУ3) для слежения с борта имитатора ЛА-заправщика за положением имитатора ЛА-приемника посредством третьего радиомаяка на борту имитатора ЛА-приемника; средства связи для передачи данных СБИ и первого - третьего РЦУ1 - РЦУ3 с борта имитатора ЛА-заправщика на имитатор ЛА-приемника в контур САУ, а также для передачи данных с имитаторов ЛА-заправщика и ЛА-приемника на наземный ПУЭ, блок формирования управляющих сигналов для перемещения подвижной штаги, исполнительный механизм перемещения штанги, видеокамеру, расположенную на подвижной штанге для контроля положения штанги относительно модели ЗУ, твердотельные накопители для сохранения информации на бортах имитаторов ЛА-заправщика и ЛА-приемника и информации, получаемой в процессе эксперимента с помощью СБИ и вычислителя САУ; при этом исполнительный механизм перемещения штанги содержит: поворотную складную стойку, подъемно-поворотный и подъемно-поступательный механизмы перемещения штанги по курсу и по высоте с приводами, обеспечивающими изменение положения штанги по высоте и угловому положению относительно главной строительной оси автомобиля, контроллеры приема сигналов из контура САУ через интерфейсы взаимодействия с цифро-аналоговыми преобразователями (ЦАП) и драйверы, выдающие сигналы на приводы, систему электропитания контроллеров ЦАП, драйверов и двигателей подъемно-поворотного и подъемно-поступательного механизмов; также система измерений, установленная на автомобиле-имитаторе ЛА-заправщика, содержит: СБИ имитатора ЛА-заправщика для определения его положения относительно земли, а именно средства внешнетраекторных измерений - спутниковую навигационную систему (СНС), инерциальную навигационную систему (ИНС); первый, второй и третий приемные блоки радиоцелеуказателей РЦУ1, РЦУ2, РЦУ3 соответственно для слежения за положением модели ЗУ, для слежения за положением подвижной штанги на имитаторе ЛА-приемника, для слежения за положением имитатора ЛА-приемника, первый радиомаяк на модели ЗУ для обнаружения модели ЗУ и измерения с помощью РЦУ1 ее координат относительно имитатора ЛА-заправщика, средство связи для передачи данных СБИ имитатора ЛА-заправщика и РЦУ1 - РЦУ3 в контур САУ; средство связи для передачи данных СБИ имитатора ЛА-заправщика и РЦУ1 - РЦУ3 на ПУЭ; система измерений, установленная на автомобиле-имитаторе ЛА-приемника, содержит СБИ имитатора ЛА-приемника для определения его положения относительно земли, а именно средства внешнетраекторных измерений - СНС, ИНС; средство связи для передачи данных СБИ имитатора ЛА-приемника на ПУЭ; кроме того, на автомобиле-имитаторе ЛА-приемника располагается монитор для отображения параметров взаимного положения модели ЗУ, штанги и имитатора ЛА-заправщика водителю имитатора ЛА-приемника.
2. Способ применения наземного подвижного стенда для испытаний системы автоматического управления дозаправкой в воздухе, предусматривающий управление относительным перемещением автомобилей имитаторов ЛА-заправщика и ЛА-приемника, отличающийся тем, что имитатор ЛА-заправщика выводится в область проведения эксперимента, после чего включается СБИ автомобиля имитатора ЛА-заправщика и его средство связи с контуром САУ и ПУЭ; затем автомобиль имитатор ЛА-заправщика перемещается в области проведения эксперимента по маршруту и со скоростным режимом, установленными в ходе предварительного полунатурного моделирования; после этого автомобиль имитатор ЛА-приемника выводится в область проведения эксперимента на основе информации, получаемой по средствам связи от СБИ имитатора ЛА-заправщика; при этом вычислитель опорных траекторий САУ на борту автомобиля имитатора ЛА-приемника производит расчет опорной траектории до текущего положения автомобиля имитатора ЛА-заправщика и дает целеуказание на него; параметры опорной траектории до автомобиля имитатора ЛА-заправщика, а именно координаты по широте и долготе автомобилей имитаторов ЛА-заправщика и ЛА-приемника и их относительная скорость, расстояние до текущего положения автомобиля имитатора ЛА-заправщика, видеоизображение с видеокамеры, закрепленной на штанге, отображаются на мониторе водителю автомобиля - имитатора ЛА-приемника, и на их основе осуществляется маневрирование автомобиля - имитатора ЛА-приемника; одновременно информация и видеоизображение, выводимые на монитор, записываются на твердотельный накопитель для послеэкспериментального анализа работы САУ; после достижения области проведения эксперимента и входа в область видимости автомобиля имитатора ЛА-заправщика СБИ и РЦУ1 - РЦУ3 на борту имитатора ЛА-приемника формируют и выдают их в контур САУ измерения, на основе которых вычислитель опорных траекторий САУ производит вычисление опорных траекторий и в виде цифровой информации отображает их на мониторе; по данным, отображаемым на мониторе, водитель имитатора ЛА-приемника осуществляет управление этим автомобилем в области видимости РЦУ1 - РЦУ3 в соответствии с вычисленной опорной траекторией; при этом в процессе движения автомобилей первый и третий радиомаяки, установленные на модели ЗУ и на автомобиле имитаторе ЛА-приемника, выдают сигналы, которые принимаются и обрабатываются приемными блоками РЦУ1 и РЦУ3 на борту автомобиля имитатора ЛА-заправщика; текущее положение подвижной штанги на борту автомобиля имитатора ЛА-приемника определяется с помощью пары вторых радиомаяков РЦУ2, установленных на штанге и вместе с видеокамерой на штанге обеспечивающих контроль положения штанги относительно модели ЗУ; с помощью РЦУ1 - РЦУ3 на автомобиле имитаторе ЛА-заправщика измеряются текущие координаты положения модели ЗУ, штанги и автомобиля имитатора ЛА-приемника, которые передаются через средство связи совместно с измерениями СБИ автомобиля имитатора ЛА-заправщика в контур САУ на борту автомобиля имитатора ЛА-приемника; измерения от СБИ автомобиля имитатора ЛА-заправщика и РЦУ1 - РЦУ3 поступают в контур САУ через интерфейсы передачи данных в вычислитель опорных траекторий, который осуществляет определение опорных траекторий до объектов наблюдения - автомобиля имитатора ЛА-заправщика и масштабируемой модели ЗУ и формирует командные сигналы для перемещения подвижной штанги; подвижная штанга на стойке в кузове автомобиля имитатора ЛА-приемника осуществляет перемещение по высоте и курсу по сигналам, получаемым из контура САУ, обеспечивая устранение рассогласований по высоте и курсу положения модели ЗУ и штанги; на монитор водителя автомобиля имитатора ЛА-приемника выводятся информация, получаемая на основе измерений с СБИ и данных с вычислителя опорных траекторий - удаление, боковое отклонение по курсу и высота модели ЗУ относительно контрольной точки штанги с видеокамерой, а также изображение с видеокамеры, которое одновременно записывается на твердотельный накопитель информации; САУ осуществляет коррекцию скоростного режима и опорной траектории автомобиля имитатора ЛА-приемника относительно положения модели ЗУ с учетом возможных колебаний модели ЗУ относительно автомобиля имитатора ЛА-заправщика на основе измерений первого и третьего радиомаяков и когерентных этим радиомаякам РЦУ1 и РЦУ3, установленных на модели ЗУ, автомобилях имитаторах ЛА-приемника и ЛА-заправщика соответственно; на основе разницы скоростей автомобиля имитатора ЛА-заправщика и модели ЗУ САУ формирует поправки, обеспечивая стабилизацию скоростного режима; водитель автомобиля имитатора ЛА-приемника осуществляет, согласно получаемой с монитора информации, маневрирование так, чтобы автомобиль вышел на скоростной режим автомобиля имитатора ЛА-заправщика и на отображаемое на мониторе взаимное положение имитатора ЛА-приемника и модели ЗУ; стабилизация взаимного положения автомобилей имитаторов ЛА-заправщика и ЛА-приемника осуществляется на таком расстоянии относительно друг друга, чтобы модель ЗУ и подвижная штанга не касались друг друга и чтобы взаимное положение имитатора ЛА-приемника и модели ЗУ установилось вдоль фиксированной в пространстве прямой, соединяющей положение первого радиомаяка на модели ЗУ и контрольную точку на штанге с видеокамерой, а главные строительные оси автомобиля имитатора ЛА-приемника и штанги были выставлены параллельно друг другу.
| CN 114476122 A, 13.05.2022 | |||
| CN 116700042 A, 05.09.2023 | |||
| Полуавтоматический станок для продораживания коллекторов электрических машин | 1959 |
|
SU130101A1 |

