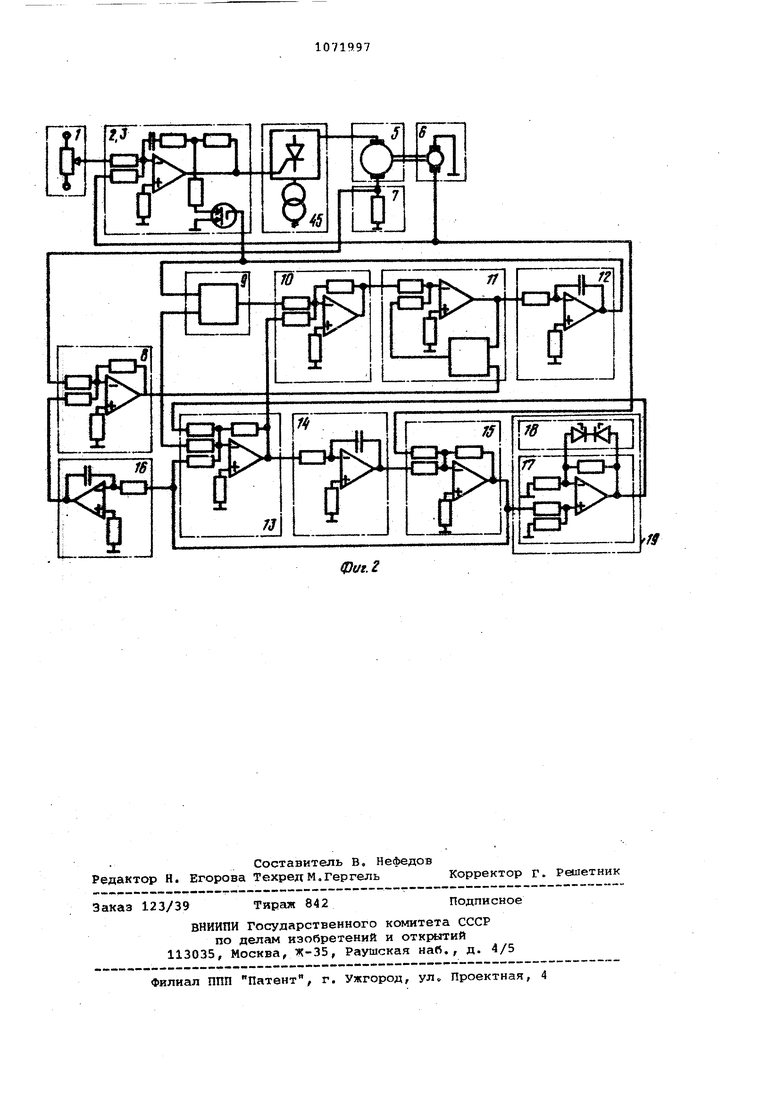
Изобретение относится к самонастаривающимся систамам автоматического управления для управления электроприводами, в которых в проце се работы имеет место изменение коэффициента передачи из-за рех улировпия потока возбуждения двигателя; .и изменения момента инерции, нагруз ки, и может быть использовано, например, в системах автоматического управления приводами рабочих органо манипуляционных роботов, в системах автоматического управления приводам главного движения металлорежущих станков, в системах автоматическог управления приводами непрерывных прокатных станов. Известна система управления, содержащая последовательно соединенные задатчик, регулятор, электродви гатель с усилителем мощности, объек управления, соединенный с входом датчика промежуточной переменной, идентификатор, первый измеритель ошибки и блок формирования сигнала управления, выход которого подключе ко второму вход-у регулятора, третий вход которого через сумматор соединен со вторым выходом идентификатора , а выход - со вторым входом идентификатора, третий выход которо го через последовательно соединенны второй измеритель ошибки, блок форм рования сигнала коррекции и блок масштабных коэффициентов соединен с т)етьим входом идентификатора, Втор блока форми|зования сигнала коррекции подключен к выходу первого измерителя ошибки, второй вход KOTODoro соединен с выходом задатчина, выход датчика промежуточной переменной подключен ко второму входу второго измерителя ошибки. Да ная система содержит идентификатор, но настройка его с целью адаптации к изменению параметров управляемого объекта осуществляется не параметри ческим, а сигнальным способом. Для этого формируется на выходе второго измерителя ошибки разница между дей ствительным значением промежуточной переменной, снимаемым с датчика, и ее оцененным значениям, вырабатываемым идентификатором, преобразуется в блоке фop даpoвaния сигнала коррекции (представляющем собой усилитель с большим коэффициентом усиления и ограничением) и через блок масштабных коэффициентов подается на вход идентификатора, чем достигается работоспособность последнего при изменении параметров объекта L11. Недостатком данной системы является ограниченный диапазон допустимых изменений параметров объек та управления. (Наиболее близкой по текнитаском решению к предлагаемой является самонаетрс иваюо1аяся система управления, содержащая последовательно соедиь:енные задатчик скорости; перв ый су iviJvia тор, ре г ул я т ор, ус ил и т ел ь моткости и электродвигатель, соедипенный механически со входом датчика скорости и электрически - со входом датчика тока., последовэ.гельно соединенные второй сумматор и ojiOK у:миоже ия, последовательно соединенные третий с п лматор, первый интегратор, четвертый сумг 1атпр и второй интегратор, подключенный выходом к первому входу второго сумматора, второй вход которого соединен с выходом датчика тока,, второй вход регулятора подключен к выходу третьего интегратора и ко второму входу блока умножения, выход датчика скорости соединен со сторым входом первого сумглатора и со вторым входом четвертого сумт- атора, выход которого подключен к первому входу третьего cy waтopa. Известная система работоспособна при переменном моменте нагрузки, регулировании возбуждения двигателя и изменении его приведенного момента инерции к осущес гпляет стабилизацию коэффициента усиления в основном контуре регулирования скорости двигателя в условиях широкогоизменения электр-омеханичеакой постоянной времени привода L21. Недосэгатком известной систе: ы является зависимость скорост:- самонастройки от среднего значения тока двигателя в переходных процессаХе Зследствие этого в режимах, соответствующих уровням тока; меньшим, чем те,- на которые настроена система, скорость самонастройки системы будет недостаточной для точной стабилизации контурного коэффициента усиления основмого контура регулирования,- в ,)ьтате чего значение этого коэффициента окажется меньше номяналького и, следовательно, уменьгоится динамическая точность контурд регулирования скорости, его быстродействие Mf как npa.B -fJio (при стандартных ипстройках типа симглетричного оптимума) ,. запас УСТОЙЧИВОСТИ, и.ег-.ъ изобретения -- обеспечение инвариантности точности, быстродействия и запасов устойчивости самонастраивающейся систвг-Ы от величины тока злектродвигателя. Для достижения этой цели система дополнительно содержит релейный элемент, вход которого подключен к выходу четвертого суг лматора, а выход ко второму входу третьего сум)Матора, а также последовательно соединенные пятый сумматор, первый и второй входы которого соединены с выходами соответственно третьего сумматора и блока умножения, и бло деления, подключенный выходом к вход третьего интегратора, а вторым входом - к выходу второго сумматора и к третьему входу третьего сумматора. На фиг. 1 изображена функциональная блок-схема самонастраивающейся системы управления; на фиг. принципиальная схема примера конкретного выполнения системы. Предлагаемая система содержит задатчик 1 скорости, первый сумматор 2, регулятор 3, усилитель 4мощн сти, электродвигатель 5, датчик 6 скорости, датчик 7 тока, второй сум матор 8, блок 9 умножения, третий сумматор 10, блок 11 деления, первы интегратор 12, четвертый сумматор второй интегратор 14, пятый суммато 15,третий интегратор 16, операционный усилитель 17, ограничительный элемент 18 и релейный элемент 19. Основной контур регулирования образован блоками 1-6. Блоки 7-18 образуют устройство идентификации коэффициента передачи ток-скоростъ электродвигателя. Оценка этого коэф фицента, вырабатываемая интеграторо 16,подается на управляквдий вход регулятора 3, перестраивав его коэф фициент усиления, благодаря чему обеспечивается постоянство коэффициента усиления основного контура, а, следовательно, и стабилизация его динамических свойств. В устройстве идентификации блоки 7, 8 и 10, 12,13, 14,17,18 служат для получения оценки производной скорости двигателя. При этом интегр тор 12 является моделью механическо части двигателя, вследствие чего на выходе сумматора 13 вырабатывается сигнал, пропорциональный ошибке между истинным значением скорости двигателя, снимаемым с выхода датчи ка 6 скорости,и оцененным значение снимаемым с выхода: интегратора 12. Таким образом, сумматор 10 вырабатывает оценку производной скорости Сходимость вырабатывае№лх оценок, переменных к их истинным значениям достигается благодаря введению новых блоков 17 и 18, реализукяцих в идеале знаковую (релейную) функцию ошибки, так что с течением времени осйибка {выход сумматора 13) стремит ся к нулю. Важным для правильного функционирования устройства идентификации является нашичие интегратора 14, вырабатываквдего оценку тока нагрузки, вследствие чего сигнал на .выходе сукматора 8 служит .оценкой динамического тока, т.е. той же переменной, которая реально действует на входе двигателя. Наличие информации о динамическом токе и о производной скорости двигателя упрощает исходную задачу, сводя ее к задаче идентификации нестационарного коэффициента передачи безынерционного звена по его входному и выходному сигналам. Решение этой задачи обеспечивается совместной работой блоков 9, 16 и вновь введенных блоков 15 и 11 В соответствии с принципиальной схемой (фиг. 2) задатчик 1 может быть реализован, например, в виде потенциометра, сумматор 2 и регулятор 3 - на одном операционном усилителе, например на интегральной микросхеме К553УЛ1В, причем управление регулятором (изменение его коэффициента передачи обратнЬ пропорционально сигналу оценки коэффициента передачи двигателя) наиболее просто может быть осуществлено применением полевого транзистора, например типа КГ901. Сумматоры 8, 10, 13 и 15, усилитель 17 и интеграторы 12, 14 и 16 могут быть выполнены на операционных усилителях К553УД1В, елок 9 умножения и блок 11 деления (реализуемый наиболее просто в виде операционного усилителя с блоком умножения в цепи обратной срязи) - например на прецизионных интегральных микросхемах аналоговых перемножителей 525ПС1, нелинейный элемент 18 - в виде двух встречно включенных стабилитронов, Самонастраивашпая Система управления работает следующим образом, Эадатчик 1 вырабатывает задающий сигнал, который через сумматор 2, регулятор 3 и усилитель 4 мощности, передается на двигатель 5, раэвиваквдий скорость вращения, соответствукщую задающему сигналу. Указанное соответствие обеспечивается совместным действием регулятора Зи главной отрицательной обратной связи с выхода датчика 6 скорости на вход сумматора 2. Настроечные парамет регулятора 3 выбраны таким образе, что при номинальном приведенном 1« менте инерции двигателя 5 и иоминальном потоке возбуждения динамические свойства системы (быстродействие и динамические ошибки по управленип и возмущению) удовлетворяют техническим требованиям и считаются оптимальными, Предложим, что момент кагруэки двигателя постоянен, а коэффициент передачи у1 ньшился, например вслед ствие увеличения приведенного момента инерции, В этом случае во время переходного процесса, например по правлению (западапщй сигнал величился), выходной сигнал датчика 7 тока, проходя через блоки 8, 10 и 14, вызовет увеличение выходного сигнала интегратора 12, который вычитается в сумматоре 13 сигнала датчика скорости, и навыходе сумматора 13 появится отрицательный сигнал ошибки. Вследствие этого на выходе масштабного усилителя 17 появится постоянный отрицательный сигнал, значение которого определяется параметрами нелинейного элемента 18. Этот сигнал, складываясь сумматоре 10 с выходным сигналом сумматора 13, будет уменьшать выход ной сигнал интегратора 12 до тех пор, пока он не сравняется со значе нием сигнала датчика скорости. Как только напряжение ошибки на выходе сумматора 13 станет равным нулю, контур образованный блоками 10, 12 13 и 17, начнет работать с скользящем режиме (реальное скольжение с конечной частотой переключения, обу ловленной неидеальностью элементов поддерживая сялибку близкой к нулю благодаря тому, что блок 17, охвачанный обратной связью 18, имеет в нулевой точке большой (теоретичес ки бесконечный) коэффициент усиления. Устойчивость скользящего режима обеспечивается наличием отрица.тельной связи между выходом суммато ра 13 и вторым входом сумматора 10 Таким образом, выходной сигнаш инте ратора 12 асимптотически стремится к значению, пропорциональному окорбсти двигателя, вследствие чего выходной сигнал сумматора 10 будет стремиться к значению, пропордио.напьному производной скорости. Описанные рассуждения верны при условии, что отрицательный сигнал на выходе интегратора 14 пропорционален току нагрузки. Предположим Теперь, что нагрузка изменилась, ,например, момент нагрузки увеличил ся. Вследствие этого в первый момен напряжение на выходе датчика 6 скорости уменьшится, и на выходе cyNn aTOpa 13 появится отрицательный сигнал сяиибки, вследствие чего абсо лютное значение отрицательного сигнала на выходе интегратора 16 возрастет , стремясь достичь значения тока нагрузки. Тем не менее, в силу инерционности интегратора 14 на появление сигнала оишбкн раньше отреагируют контур, составленный из блоков 10, 12 и 13, и контур, образованный блокги и 10, 12, 13 и 17, При этом на выходе усилителя 17 появится постоянный отрицательный сигнал. В результате ошибка на выходе блока 13 снова устремится к нулю и затем изменит знак, из-за чего выходной сигнал блока 14 будет стремиться уменьшиться. Однако новое переключение знака сигнала блока 17 и совместное действие указанных контуров заставят ошибку снова уменьшаться, а выходной интегратора 14 - увеличиваться и т.д. Таким образом, контур , образованный блоками 10, 12, 13 и 17, по-прежнему, будет работать в сколъзя1я,емрежиме к с той, однако, разницей, что среднее значение сигнала на выходе сумматора 13 будет иметь дополнительную отрицательную составляющую, наличие которой обусловлено несоответствием между значением выходного сигнала интегратора 14 и фактическим током нагрузки. Действие этой составляющей приведет в итоге к увеличению выходного сигнала интегратора 14 до значения, пропорционального новому значению тока нагрузки., Таким образом, на выходе сумматора 8| вырабатывается оценка динамического тока двигателя. В блоке 9 умножения она умножается на выходной сигнал интегратора 16, представлякадий соёой оценку коэффициента передачи двигателя. Далее в сумматоре 15 результат вычитается из сигнала оценки производной скорости враще ния. Так«как, по сделанному предложению коэффициент передачи двигателя уменьшился, а значение его оценки осталось; прежним, то на выходе сумматора 15 появится отрицательный сигнал ошибки, который, проходя через блок лёления 11, где он делится на оценку динамического тока, поступает на вход интегратора 16, уменьшая его выходной сигнал до тех пор, пока ошибка не станет равна нулю. В этом случае, очевидно, значение сигнала на выходе интегратора 16 будет точно соответствовать новому значению коэффициента передачи двигателя. Этот сигнал, поступая на второй (управляющий) вход регулятора 3, увеличит его коэффициент передачи, в результате чего коэффициент передачи основного контура регулирования (скорости вращения электродвигателя)остается неизменным. В предлагаемой системе исключено влияние значения тока двигателя на скорость сг1монастройки благодаря последовательному включению блока 9 умножения и блока 11 деления в-контуре, образованном блоками 9, 15, 11 и 16. Технико-экономические показатели системы приводятся в- сравнении с базовым объекторм, в качестве которого принята типовая промышленная система управления электроприводом с двухзонным регулированием скорости JlJ)aщeния.., Предлагаемая система при 8-крат ном изменении коэффицинта передачи двигателя обеспечивает повыдеиие точности стабилизации скорости в 5,3 раза, что позволяет получить более высокую чистоту обработки дет лей. Однако главное состоит в тем, что при уменьшении коэффициента передачи двигателя более чем в 5 ра резко уменьшается запас устойчивост систелвл (например, для широко распространенной настройки на симметричный оптимум - с 13 и менее), что приводит к появлению в системе недопустимых колебаний. Это заставляет снижать быстродействие системы, отводя от рекомендованных для стационарной систекы настроек, .что приводит к дополнительному снижению точности по сравнению с предлагаемой системой. В наибольшей степени параметрическая нестационарность в контуре регулирования скорости оказывает влияние иа процессы по управлению. Если и приводе главного движения станков эти процессы играют второстепенную роль, то в приводах рабочих органов роботов или мотгшок прокатных станов они являются ощэеделя саими. Для рекокюндуемого типа настройки уже при 4-кратяся4 уменьшении потока двигателя время регулирования возрастает в 11 раз, а для настройки на симметричный оптимум более чем в 30 раз, что приводит к существенному снижению производительности оборудования.



| название | год | авторы | номер документа |
|---|---|---|---|
| Самонастраивающаяся система управления | 1979 |
|
SU845143A1 |
| Самонастраивающаяся система управления | 1985 |
|
SU1277065A1 |
| Самонастраивающаяся система управления | 1983 |
|
SU1158974A1 |
| Самонастраивающаяся система управления | 1979 |
|
SU851339A1 |
| Самонастраивающаяся система управления | 1983 |
|
SU1138787A1 |
| Система управления объектом с упругими связями | 1980 |
|
SU941923A1 |
| Самонастраивающаяся система с приводом на муфтах | 1987 |
|
SU1444712A1 |
| Самонастраивающаяся система управления | 1980 |
|
SU962852A2 |
| Самонастраивающийся следящий электропривод | 1986 |
|
SU1366992A1 |
| Самонастраивающаяся система управления | 1987 |
|
SU1462242A1 |

Q}ui.f
