Изобретение относится к автоматическому управлению и может быть использовано для управления электрогидравлическими приводами с нелинейностью и нестационарностью параметров в условиях помех, применяемыми, например, в промышленных роботах, летательных аппаратах, стендах для полунатурного моделирования.
Целью изобретения является повышение точности и быстродействия электрогидравлической следящей системы в условиях переменности параметров и влияния помех.
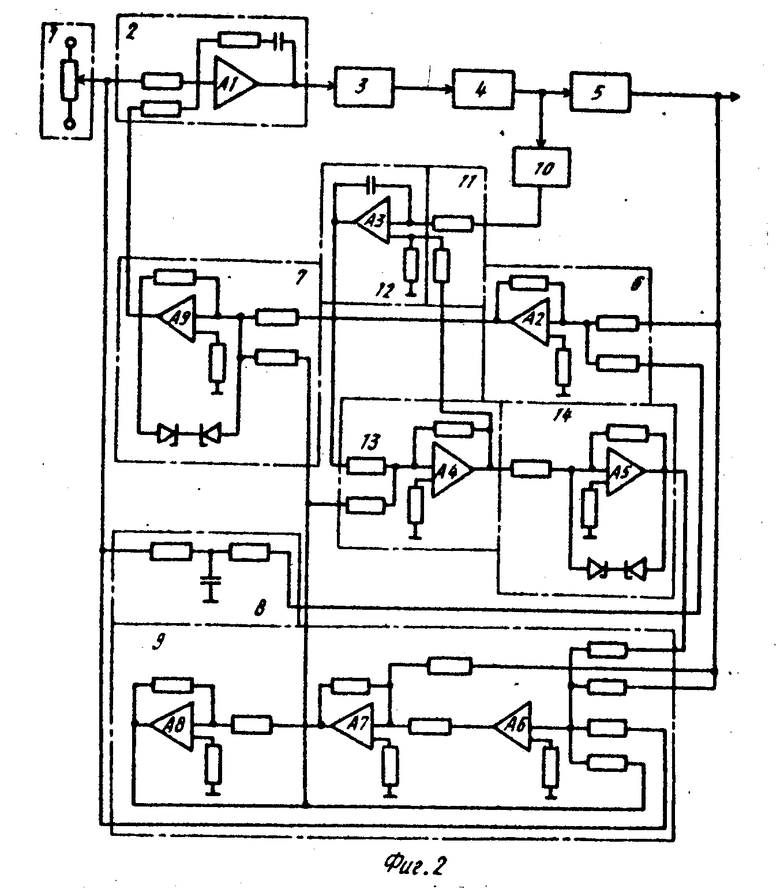
На фиг. 1 приведена функциональная схема электрогидравлической следящей системы; на фиг.2 вариант реализации системы.
Электрогидравлическая следящая система содержит последовательно соединенные блок задающих сигналов 1, регулятор 2, электрогидравлический усилитель 3, гидропривод 4, датчик положения 5, первое сравнивающее устройство 6 и первый релейный усилитель 7, выход которого подключен к второму входу регулятора 2, а также эталонную модель 8 и идентификатор состояния 9, причем выход эталонной модели соединен с вторым входом первого сравнивающего устройства 6, а вход с выходом блока задающих сигналов 1, с которым также соединен первый вход идентификатора состояния 9, второй вход идентификатора состояния 9 подключен к выходу датчика положения 5, а его выход к второму входу первого релейного усилителя, а также содержит последовательно соединенные датчик давления гидропривода 10, блок масштабных коэффициентов 11, интегратор 12, второе сравнивающее устройство 13 и второй релейный усилитель 14, выход которого соединен с третьим входом идентификатора состояния 9, второй вход второго сравнивающего устройства подключен к выходу идентификатора состояния 9, а второй выход блока масштабных коэффициентов подключен к выходу второго сравнивающего устройства 13, вход датчика давления гидропривода 10 соединен с вторым выходом гидропривода 5.
Электрогидравлическая следящая система работает следующим образом. Блок задающих сигналов 1 вырабатывает командный сигнал, который поступает на первый вход регулятора 2, выполняющего, если необходимо, функции предварительного усилителя, затем через электрогидравлический усилитель 3 на гидропривод 4, на выходном валу которого установлен датчик положения 5 выходного вала гидропривода. Сигнал X с датчика положения 5 сравнивается на первом сравнивающем устройстве 6 с сигналом Xm эталонной модели 8, обладающей на перед заданным быстродействием и желаемой формой переходных процессов. Полученная ошибка Xm-X вместе с сигналом  , вырабатываемым идентификатором состояния 9, поступает на входы первого релейного усилителя 7, который реализует суммирование выходных сигналов с соответствующими весовыми коэффициентами p1 и p2 и одновременно знаковую функцию
, вырабатываемым идентификатором состояния 9, поступает на входы первого релейного усилителя 7, который реализует суммирование выходных сигналов с соответствующими весовыми коэффициентами p1 и p2 и одновременно знаковую функцию ,
,
где Z1 выходной сигнал первого релейного усилителя;
K1 положительная постоянная.
Далее полученный сигнал поступает на второй вход регулятора 2, замыкая контур коррекции системы по сигналу ошибки управления.
Идентификатор состояния 9 представляет собой упрощенную модель объекта первого порядка в линейном и стационарном приближении. Параметры модели выбираются на основе усредненных линеаризованных характеристик объекта. Согласование оценки дополнительной переменной, вырабатываемой линейной частью идентификатора 9, с ее истинным значением в линейном и нестационарном объекте управления осуществляется с помощью вновь вводимого контура коррекции оценки дополнительной переменной, состоящего из блоков 10, 11, 12, 13, 14, работающего следующим образом. С помощью датчика давления 10 с гидропривода 4 снимается сигнал, пропорциональный ускорению выходного вала привода, затем через блок масштабных коэффициентов 11 и интегратор 12 сигнал X1, пропорциональный оценке скорости привода, подается на вход второго сравнивающего устройства 13, которое вырабатывает ошибку "у" между значением оценки дополнительной переменной  , вырабатываемой идентификатором состояния 9, и сигналом X1:
, вырабатываемой идентификатором состояния 9, и сигналом X1: .
.
Второй линейный усилитель 14, на который затем подается сигнал "у", реализует знаковую функцию
Z2 K2signy,
где Zc выходной сигнал второго релейного усилителя 14;
K2 положительная постоянная.
Для коррекции работы интегратора 12 введена отрицательная обратная связь с выхода второго сравнивающего устройства 13 на второй вход блока масштабных коэффициентов 10. Это обеспечивает сброс выходного значения интегратора 12, ликвидируя тем самым уход вырабатываемой величины оценки скорости гидропривода, который имеет место вследствие действия на систему помех, влияния ошибок и переменности параметров гидропривода. Регулирование глубины обратной связи интегратора 12 осуществляется с помощью блока масштабных коэффициентов 11. Введение такой отрицательной обратной связи возможно благодаря реализации высокого быстродействия контура коррекции дополнительной переменной.
Электрогидравлическая следящая система может быть реализована следующим образом. Электрогидравлический усилитель, гидропривод и датчик давления имеют известные реализации, датчик положения может быть выполнен, например, потенциометрическим круговым, блок задающих сигналов может быть осуществлен с помощью регулируемого потенциометра, подключенного к постоянному питающему напряжению, а остальные блоки могут быть реализованы на операционных усилителях с резистивными и емкостными прямыми и обратными связями и другими элементами, как показано на электрической схеме на фиг.2. Регулятор 2 представляет собой пропорционально-интегральное звено, реализованное на операционном усилителе A1 с указанной на фиг.2 обратной RC-связью, что придает свойства астатизма первого порядка следящему контуру и выполняет функцию масштабирования и, если необходимо, предварительного усиления. Идентификатор состояния 9 выполнен на трех операционных усилителях A6, A7, A8, осуществляющих метод прямого интегрирования дифференциального управления объекта по последовательной схеме.
Данная система за счет введения быстродействующего контура коррекции оценки дополнительной переменной позволяет повысить точность и быстродействие, а также избежать неустойчивости при действии на систему помех и влиянии переменности и нелинейности параметров гидропривода.
| название | год | авторы | номер документа |
|---|---|---|---|
| ЭЛЕКТРОГИДРАВЛИЧЕСКАЯ СЛЕДЯЩАЯ СИСТЕМА | 1996 |
|
RU2111521C1 |
| Система управления | 1983 |
|
SU1120283A1 |
| ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ СЛЕДЯЩИЙ ПРИВОД | 1999 |
|
RU2161579C1 |
| ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ СЛЕДЯЩИЙ ПРИВОД НЕПОСРЕДСТВЕННОГО УПРАВЛЕНИЯ С АДАПТИВНЫМИ СВОЙСТВАМИ | 2008 |
|
RU2368932C1 |
| Устройство для управления электроприводом | 1982 |
|
SU1061105A1 |
| Устройство для управления синхронно перемещающимися механизмами станка | 1981 |
|
SU985760A1 |
| ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ СЛЕДЯЩИЙ ПРИВОД | 1990 |
|
RU2015521C1 |
| Система управления объектом с упругими связями | 1980 |
|
SU941923A1 |
| Самонастраивающаяся система управления | 1982 |
|
SU1071997A1 |
| СЛЕДЯЩАЯ СИСТЕМА АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ С КОМПЕНСАЦИЕЙ НЕИЗМЕРЯЕМЫХ ВОЗМУЩЕНИЙ | 1991 |
|
RU2051401C1 |

Изобретение относится к автоматическому управлению системами стабилизации и следящими системами. Цель изобретения - повышение точности и быстродействия электрогидравлической следящей системы в условиях переменности параметров и влияния нелинейности и помех. Это достигается за счет того, что дополнительно вводятся последовательно соединенные датчик давления гидропривода, блок масштабных коэффициентов, интегратор, второе сравнивающее устройство и второй релейный усилитель, выход которого соединен с третьим входом идентификатора состояния, второй вход второго сравнивающего устройства подключен к выходу идентификатора состояния, второй вход блока масштабных коэффициентов подключен к выходу второго сравнивающего устройства, а вход датчика давления гидропривода соединен с вторым выходом гидропривода. Посредством вновь вводимых блока и связей образуются дополнительный контур коррекции идентификатора состояния и контур, обеспечивающий помехоустойчивость интегратора. Этим достигается повышение точности и быстродействия системы при изменении параметров и влияния нелинейностей и помех. 2 ил.
Электрогидравлическая следящая система, содержащая последовательно соединенные блок задающих сигналов, регулятор, электрогидравлический усилитель, гидропривод, датчик положения, первое сравнивающее устройство и первый релейный усилитель, выход которого подключен к первому входу регулятора, а также содержащая эталонную модель и идентификатор состояния, первый и второй входы которого подключены к выходу блока задающих сигналов и выходу датчика положения соответственно, выход идентификатора состояния соединен с вторым входом релейного усилителя, вход эталонной модели соединен с выходом блока задающих сигналов, а ее выход с вторым входом сравнивающего устройства, отличающаяся тем, что, с целью повышения быстродействия и точности системы, в нее введены последовательно соединенные датчик давления гидропривода, блок масштабных коэффициентов, интегратор, второе сравнивающее устройство и второй релейный усилитель, выход которого соединен с третьим входом идентификатора, второй вход второго сравнивающего устройства подключен к выходу идентификатора состояния, второй вход блока масштабных коэффициентов подключен к выходу второго сравнивающего устройства, а вход датчика соединен с вторым выходом гидропривода.
| Электрогидравлическая следящая система | 1971 |
|
SU479079A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
| Самонастраивающаяся система управления | 1980 |
|
SU928300A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
