Изобретение относится к области судостроения и касается вопросов проектирования и создания судовых движительно-рулевых комплексов.
В настоящее время в практике проектирования судов и кораблей получили распространение три типа движительно-рулевых комплекса (ДРК):
гребной винт с рулем, расположенный в диаметральной плоскости (ДП),
гребные винты и рули, расположенные по бортам,
гребные винты, расположенные по бортам, с рулем в ДП.
Каждый из этих ДРК имеет свои достоинства и недостатки и, как правило, применяется для определенного типа судов. В частности для быстроходных судов используются ДРК с двумя гребными винтами. Что касается рулей, то лучшие характеристики устойчивости и поворотливости судна обеспечиваются при установке двух рулей за гребными винтами. Однако зачастую это приводит и к нежелательным последствиям. Так, например, хорошая поворотливость может способствовать появлению большого крена на циркуляции. Известны случаи, когда установка рулей за гребными винтами приводила к раскачке судна при движении на прямом курсе. Кроме того, отрицательное влияние кавитации проявляется в большой степени для рулей, расположенных за гребными винтами. Следует также отметить, что в варианте установки двух рулей усложняется конструкции рулевого привода по сравнению с однорулевым вариантом.
В связи с этим на судах наряду с двухрулевой схемой получил распространение ДРК, состоящий из гребных винтов, расположенных по бортам, и руля в ДП. Такое техническое решение известно (Ван Ламмерен, Троост, Конинг. Сопротивление, пропульсивные качества и управляемость судов. Л.: Судпромгиз, 1957) и принято в качестве прототипа.
Указанный ДРК лишен перечисленных выше недостатков, присущих ДРК с двумя рулями. Однако, как правило, суда с таким типом ДРК имеют низкие характеристики управляемости в особенности при движении на малых скоростях.
Задачей заявляемого изобретения является создание ДРК, обеспечивающего судну улучшение его маневренных характеристик в особенности при движении на малых скоростях, и не оказывающего при этом отрицательного влияния на другие эксплуатационные качества судна.
Для достижения указанного технического результата в известном движительно-рулевом комплексе судна, включающем расположенные по бортам два гребных винта и руль в ДП, за каждым гребным винтом, в площади его диска, на расстоянии 0,7-3 диаметра гребного винта от плоскости диска, установлен вращающийся ротор с возможностью его выдвижения и убирания во внутрь корпуса судна, при этом ротор выполнен в виде телескопического цилиндра, все элементы которого выполнены с возможностью вращения в одну сторону, причем каждый ротор имеет автономное управление, например, с командного пункта судна.
Использование в ДРК вращающихся роторов, расположенных за гребными винтами на расстоянии 0,7-3 его диаметра, обеспечивает получение большой боковой силы даже в отсутствии хода при работе гребных винтов в швартовном режиме, т. е. в режиме, при котором боковая сила, возникающая на ДРК - прототипе, практически равна нулю.
Использование в ДРК выдвижных роторов сохраняет неизменными ходовые характеристики судна, а также обеспечивает безопасность их эксплуатации при различных скоростях хода.
Выполнение роторов в виде телескопических цилиндров позволяет сэкономить судовой объем как для размещения механизма управления роторами, так и для других целей.
Автономное управление каждым ротором позволяет в соответствии с потребностями маневрирования осуществить регулировку выдвижения ротора и скорости его вращения.
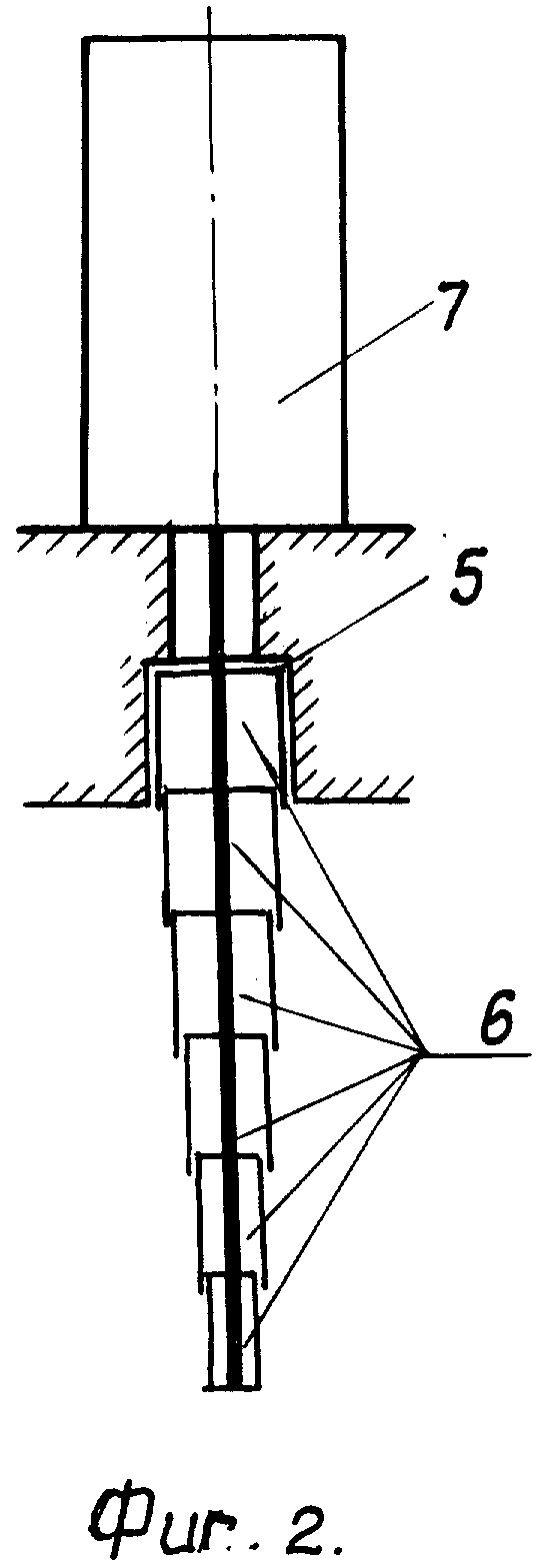
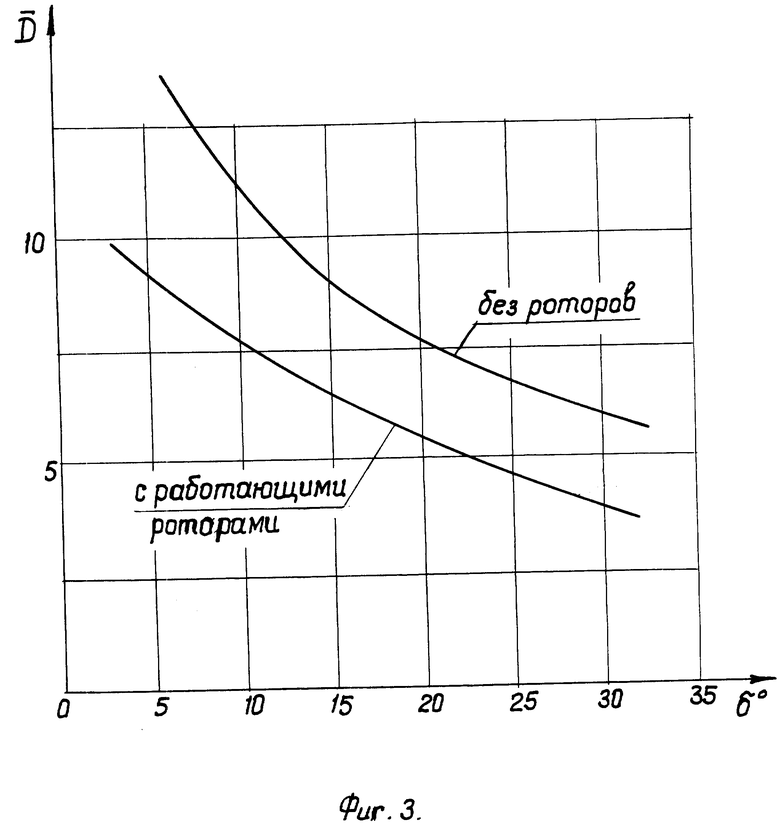
Сущность изобретения поясняется чертежами, где на фиг. 1 показана кормовая оконечность судна с движительно-рулевым комплексом; на фиг. 2 - ротор в виде телескопического цилиндра (в выдвинутом положении), и на фиг. 3 - кривые, демонтирующие эффективность действия технического решения на управляемость судна.
В кормовой оконечности (фиг. 1) по ДП судна 1 расположен руль 2, а за каждым гребным винтом 3 по бортам судна в диске гребного винта на расстоянии 0,7-3 диаметра гребного винта от плоскости его диска установлены выдвинутые роторы 4, размещенные в нише 5 корпуса, с возможностью их утапливания в корпусе судна.
Каждый выдвижной ротор 4 выполнен в виде телескопического цилиндра (фиг. 2), состоящего из вдвигаемых друг в друга вращающихся цилиндрических элементов 6. В корпусе судна (фиг. 2) имеется исполнительный механизм 7 для обеспечения вращения, выдвижения из корпуса судна, а также втягивания обратно роторов 4.
ДРК работает следующем образом. При натекании потока на вращающийся ротор, за счет разности скоростей на верхней и нижней поверхностях ротора возникает разность давлений, приводящая к появлению на нем боковой силы. Причем эта сила тем больше, чем выше скорость вращения ротора. Наличие дополнительной боковой силы, обусловленной работой роторов, эквивалентно увеличению эффективности руля, которое обеспечивает улучшение как устойчивости прямолинейного движения, так и поворотливости судна. При действии волнения и ветра, на малых скоростях хода, при которых работа для руля становится малоэффективной, боковая сила от работающих роторов становится практически единственной силой (не считая упора гребных винтов), обеспечивающей управление судном. Величина боковой силы зависит от соотношения между линейной скоростью движения точек, расположенных на поверхности ротора, и скоростью потока, натекающего на ротор. Для предлагаемого ДРК натекающий поток формируется из потока жидкости, обтекающего корпус судна, и потока, вызванного работой каждого гребного винта.
В зависимости от характера действия внешних возмущений или необходимости совершения того или иного маневра работа ротора разных бортов может отличаться друг от друга, т.е. они могут выдвигаться на разную глубину или иметь различные скорости вращения.
Авторами была проведена экспериментальная проверка работы предлагаемого ДРК и выполнено сопоставление с прототипом.
Соответствующие результаты в виде зависимости относительного диаметра установившейся циркуляции  от угла перекладки руля δ , приведенные на фиг. 3, показывают, что использование предлагаемого ДРК существенно уменьшает диаметр циркуляции судна по сравнению с прототипом, что обеспечивает судну более высокие эксплуатационные характеристики.
от угла перекладки руля δ , приведенные на фиг. 3, показывают, что использование предлагаемого ДРК существенно уменьшает диаметр циркуляции судна по сравнению с прототипом, что обеспечивает судну более высокие эксплуатационные характеристики.
| название | год | авторы | номер документа |
|---|---|---|---|
| ОДНОВИНТОВОЕ СУДНО | 1993 |
|
RU2042572C1 |
| РУЛЕВОЙ КОМПЛЕКС СУДНА | 1995 |
|
RU2081787C1 |
| КОЛЕСНЫЙ ДВИЖИТЕЛЬНО-РУЛЕВОЙ КОМПЛЕКС | 2001 |
|
RU2225327C2 |
| Одновинтовое судно | 1991 |
|
SU1789422A1 |
| ДВИЖИТЕЛЬНО-РУЛЕВОЙ КОМПЛЕКС СУДНА | 2017 |
|
RU2661271C2 |
| КОЛЕСНЫЙ ДВИЖИТЕЛЬНО-РУЛЕВОЙ КОМПЛЕКС СУДНА ЛЕДОВОГО ПЛАВАНИЯ | 2011 |
|
RU2456201C1 |
| КОМБИНИРОВАННЫЙ ЭЛЕКТРОДВИГАТЕЛЬ - ГРЕБНОЙ ВИНТ | 1996 |
|
RU2115590C1 |
| СУДОВОЙ РУЛЬ | 1995 |
|
RU2090443C1 |
| ДВИЖИТЕЛЬНЫЙ КОМПЛЕКС СУДНА ЛЕДОВОГО ПЛАВАНИЯ | 1997 |
|
RU2141431C1 |
| УСТРОЙСТВО ДЛЯ ИСПЫТАНИЙ ГЛАВНЫХ СУДОВЫХ ЭНЕРГЕТИЧЕСКИХ УСТАНОВОК | 1991 |
|
RU2013312C1 |
Изобретение относится к области судостроения и касается вопросов проектирования и создания судовых движительно-рулевых комплексов. Изобретение направлено на создание движительно-рулевого комплекса, обеспечивающего судну улучшение его маневренных характеристик, в особенности при движении на малых скоростях, и не оказывающего при этом отрицательного влияния на другие эксплуатационные качества судна. Движительно-рулевой комплекс судна включает в себя расположенные по бортам два гребных винта и руль в диаметральной плоскости. За каждым гребным винтом, в его диске, на расстоянии 0,7 - 3 диаметра гребного винта от плоскости диска, установлен вращающийся ротор с возможностью его выдвижения и убирания во внутрь корпуса судна. Ротор выполнен в виде телескопического цилиндра, все элементы которого выполнены с возможностью вращения в одну сторону. Каждый ротор имеет автономное управление, например, с командного пункта. 3 ил.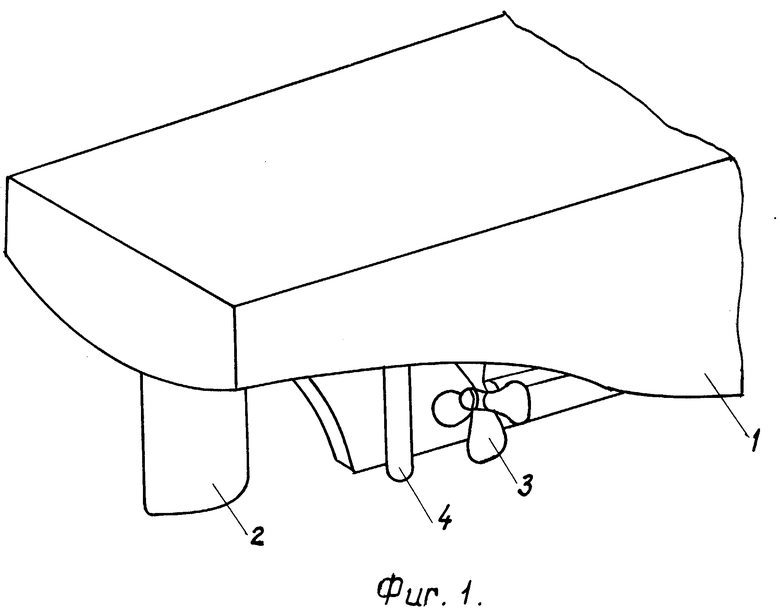
Движительно-рулевой комплекс судна, включающий расположенные по бортам два гребных винта и руль в диаметральной плоскости, отличающийся тем, что за каждым гребным винтом в площади диска на расстоянии 0,7 - 3 диаметра гребного винта от плоскости диска установлен вращающийся ротор с возможностью его выдвижения и утапливания в нише корпуса судна, при этом ротор выполнен в виде телескопического цилиндра, все элементы которого выполнены с возможностью вращения в одну сторону, причем каждый ротор имеет автономное управление через исполнительный механизм с командного пункта судна.
| Ван Ламмерен и др | |||
| Сопротивление, пропульсивные качества и управляемость судов | |||
| - Л | |||
| Судпромгиз, 1957, с | |||
| Печь-кухня, могущая работать, как самостоятельно, так и в комбинации с разного рода нагревательными приборами | 1921 |
|
SU10A1 |
