Изобретение относится к машиностроению, в частности к фрикционным многопоточным передачам с упругим звеном в каждом силовом потоке.
Известны многопоточные фрикционные механизмы с постоянными передаточными отношениями, например многопоточный двухступенчатый редуктор. /
Известный редуктор имеет ведущий катох, состоящий из ступицы с распорными роликами, на которые установлен обод, состоящий из пакета стальных плоских разрезанных колец с тупоугольными пазами на внутренней поверхности и с зубьями равного сопротивления изгибу касательными силами на наружной поверхности. Распорные ролики и тупоугольные пазы на разрезанных кольцах при работе создают силы прижатия обода ведущего катка к ведомым каткам, причем сила прижатия изменяется пропорционально передаваемому крутящему моменту.
Зубья равного сопротивления изгибу обеспечивают компенсацию скольжения в пятнах контактов от допусков на размеры и установку параллельно работающих звеньев. Проскальзывание в многопоточных фрикционных передачах возникает из-за допусков на размеры рабочих поверхностей. Ведущий каток ободом прижимается к средним ободам промежуточных катков, контактирующих с внутренней поверхностью большого колеса соосного с ведущим катком и соединенного с выходным валом.
Недостатком данного редуктора является сложность изготовления ведущего катка, особенно зубьев равного сопротивления изгибу и упругого обода.
Известное устройство может реализовать относительно небольшие передаточные отношения при заданных габаритах.
Для каждого редуктора с другим передаточным отношением требуются не только расчетные кинематические звенья, но и корпус, т.е. затруднительна унификация корпуCQ8 для редукторов с раз/1ичными передаточными отношенш т.
Наиболее близким к предлагаемому является многопоточный фрикционный редуктор, входящий в трансформатор вращающего момента.
Указанный редуктор имеет ведущий катоксупругим ободом, состоящим из наклонных к образующей цилиндра пластинзубьев равного сопротивления изгибу. Касательными силами пластины обода изгибом компенсируется скольжение, которое возникает из-за неточности и установки параллельно работающих звеньев.
От ведущего катка вращение передается распорным каткам, которые установлены в обойме на подпружиненных осях.
Распорные катки имеют контакт с промежуточными катками и при передаче круг тящего момента заклиниваются между ведущими и промежуточными катками. При заклинивании касательными силами образуются силы прижатия, пропорциональные передаваемому крутящему моменту. Силы прижатия обеспечивают передачу крутящего момента от распорных роликов к промежуточным.
Оси промежуточных катков опираются на наклонные опоры корпуса и создают дополнительные силы прижатия, необходимые во второй ступени передачи, т.е. от промежуточных катков к центральному колесу.
Центральное колесо с промежуточны/ии катками контактирует внутренней поверхностью, соосной с ведущим катком.
Недостатком известного устройства является сложность изготовления ведущего катка из-;за нарезания косых пластинчатых зубьев равного сопротивления изгибу касательной силой.
Устройство распорного катка одного диаметра не обеспечивает больших передаточных отношений при заданных габаритах редукторов.
Для каждого редуктора с заданным передаточным отношением требуется изготовление своего корпуса.
Целью изобретения является расширение кинематических возможностей и повышение нагрузочной способности.
Указанная цель достигается тем, что в многопоточном фрикционном редукторе, содержащем корпус, установленный на входном валу ведущий каток с диаметром di, с выходным валом связанное центральное большое колесо внутреннего зацепления, установленные в корпусе опоры с тупоугольными вырезами, размещенные в последних на осях двух венцовые сателлиты, взаимодействующие меньшими диаметрами с центральным колесом, обойму с подпружиненными в окружном направлении распорными катками, взаимодействующими с большими диаметрами двухвенцовых сателлитов, обойма с распорными катками установлена с возможностью поворота для периодического подключения распорных катков к сателлитам, рабочие поверхности послед«их, контактирующие с распорными катками, выполнены из упругого материала, а распорные катки выполнены двухвенцовыми для взаимодействия большим диаметром dz с ведущим катком, а диаметры выбраны из условия
d2 из
где d3 - меньший диаметр распорного катка;
о коэффициент сцепления ведущего и распорного катков;
FI и QI - касательная и сила прижатия между ведущим и распорным катками;
F2
7у коэффициент сцепления распорного катка и сателлита;
F2 и Q2 - касательная и сила прижатия между распорным катком и сателлитом.
В корпусе выполнены радиальные пазы, в которые установлены опоры осей сатёллитов на прокладках, высота которых определяется по формуле
di + d4
+ е- H - hi
h где d4 - бдльшой диаметр сателлита: - зазор между ведущим катком и большим диаметром сателлита; Н - расстояние от оси вращения катка до дна паза; hi - расстояние от оси сателлита до основания опоры. На фиг. f изображена кинематическая схема многопоточного редуктора; на фиг. 2 - разрез А-А на фиг. 1; на фиг. 3 - расчетная схема силового потока и векторы сил. На входном валу 1 неподвижно установлен жесткий ведущий каток 2. который контактирует с большими диаметрами распорных катков 3. Количество распорных катков 3 определяет число силовых потоков и определяется из условия соседства. Оси 4 распорных катков 3 установлены в обойму 5 и подпружинены.ч: двух сторон в окружном направлении упругими элементами 6. Обойма 5 с распорными катками 3 может устанавливаться в трех фиксируемых положениях: катки прижаты к сателлитам справа (по чертежу), катки прижаты слева, установлены в середине (передача отключена). Распорные катки 3 меньшими диаметрами контактируют с большими диаметрами сателлитов 7, Оси 8 сателлитов опираются на наклонные плоскости тупоугольных вырезов опор 9. которые установлены в корпусе 10 на подкладки 11. Сателлиты 7 контактируют меньшими диаметрами с центральным колесом 12 с.внутренним зацеплением, которое установлено соосно с ведущим катком 2 и соединено с выходным валом 13. Выходной вал 13 установлен на подшипнике 14 на ведущем валу 1. Рабочие поверхности сателлитов 7 выполнены из yripyroro материала.
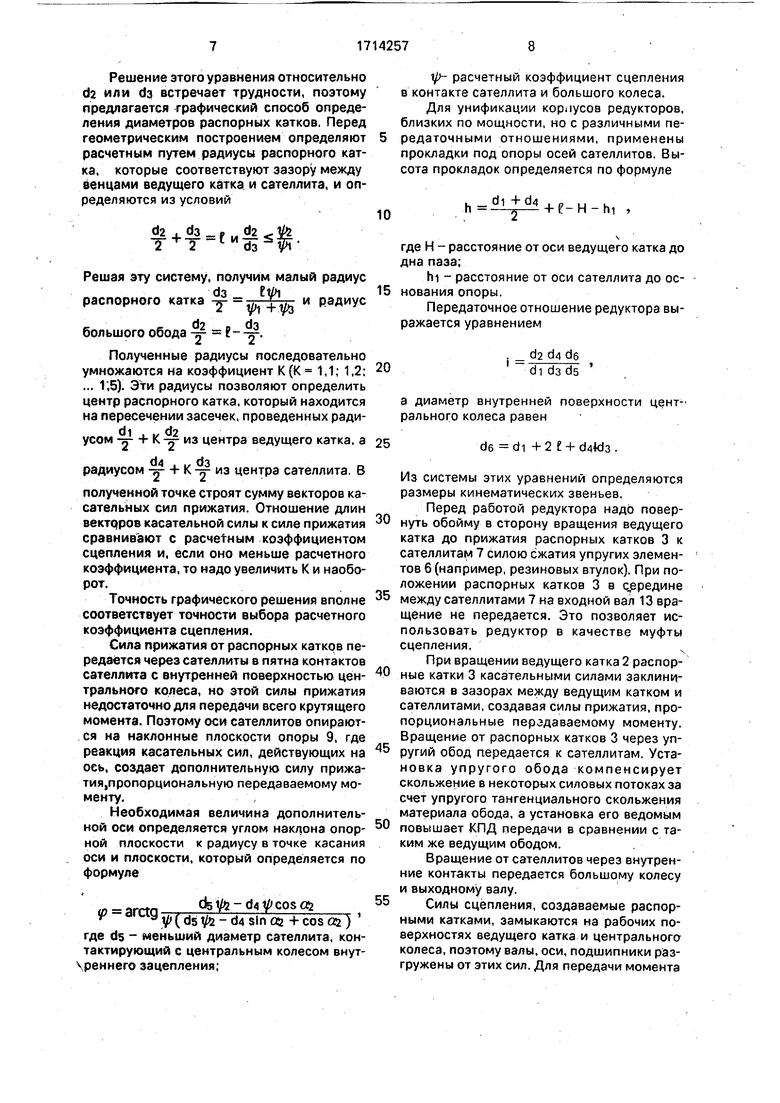
Оптимальная работа редуктора определяется отношением и величиной диаметров рабочих поверхностей распорных катков 3 и углом наклона опор осей сателлитов 7 к радиусу корпуса.
Силы прижатия Qi и Q2 (фиг. 3) равны, равны и коэффициенты сцепления в пятнах контакта между ведущим катком с диаметром di и большим диаметром d2 распорных к1атков и между меньшим диаметром da распорных катков и большим диаметром d4 сателлитов 7. Из равенства моментов сил на ободах распорного катка имеем Fid2 F2d3, а касательные силы в тех же пятнах контакта выражаются зависимостями FI Qi и F2 Подставляя эти выражения в равенство, получим
25
d2 d3 где г| -Q- коэффициент сцепления в контакте ведущего и распорного катков; v eкоэффициент сцепления в контакте распорного катка и сателлита. Из фиг. 3 видно, что отношение векторов касательной силы к силе прижатия определяется диаметрами рабочих поверхностей распорных катков 3. Для определения диаметров используется зависимость из треугольника Oi0203. по теореме косинусов имеем () (f/f ц. 2-0 V2 2; (2 2 г x(-b)cosl180-(ai-l-a2), где di -диаметр ведущего катка; - зазор между ведущим катком и большим диаметром сателлита: GTi- центральный угол ведущего катка между направлениями на центры сателлита и распорного катка; Oi- центральный угол сателлита между направлениями на центры ведущего и распорного катков. Решение этого уравнения относительно d2 или d3 встречает трудности, поэтому предлагается графический способ определения диаметров распорных катков. Перед геометрическим построением определяют расчетным путем радиусы распорного катка, которые соответствуют зазору между бенцами ведущего катка и сателлита, и определяются из условий f $ -Bl |Решая эту систему, получим малый радиус распорного катка -TJd2большого обода -у Полученные радиусы последовательно умножаются на коэффициент К (К 1,1; 1,2; ... 1;5). Этги радиусы позволяют определить центр распорного катка, который находится на пересечении засечек, проведенных радиусом -к- + К из центра ведущего катка, а радиусом - -I- К- из центра сателлита. В полученной точке строят сумму векторов касательных сил прижатия. Отношение длин вект(ров касательной силы к силе прижатия сравнивают с pacчetным коэффициентом сцепления и, если оно меньше расчетного коэффициента, то надо увеличить К и наоборот. Точность графического решения вполне соответствует точности выбора расчетного коэффициента сцепления. Сила прижатия от распорных катков передается через сателлмты в пятна контактов сателлита с внутренней гюверхностью центрального колеса, но этой силы прижатия недостаточно для передачи всего крутящего момента. Поэтому оси сателлитов опираются на наклонные плоскости опоры 9, где реакция касательных сил, действующих на ось, создает дополнительную силу прижатия,пропорциональную передаваемому моменту., Необходимая величина дополнительной оси определяется углом нак/|она опорной плоскости к радиусу в точке касания оси и плоскости, который определяется по формуле cp-arctQ . d5Vtz-d4V coso a i (ds Vu - d4 sin oa -f cos «2) где ds - меньший диаметр сателлита, контактирующий с центральным колесом внутХреннего зацепления; расчетный коэффициент сцепления в контакте сателлита и большого колеса. Для унификации корпусов редукторов, близких по мощности, но с различными передаточными отношениями, применены прокладки под опоры осей сателлитов. Высота прокладок определяется по формуле h.l + e-H-hi , где Н - расстояние от оси ведущего катка до дна паза; hi - расстояние от оси сателлита до основания опоры. Передаточное отношение редуктора выражается уравнением . d2 d de di dads a диаметр внутренней поверхности центрального колеса равен de di +2 -l-d44d3. Из системы этих уравнений определяются размеры кинематических звеньев. Перед работой редуктора надо повернуть обойму в сторону вращения ведущего катка до прижатия распорных катков 3 к сателлитам 7 силою сжатия упругих элементов 6 (например, резиновых втулок). При положении распорных катков 3 в орредине между сателлитами 7 на входной вал 13 вращение не передается. Это позволяет использовать редуктор в качестве муфты сцепления. При вращении ведущего катка 2 распорные катки 3 касательными силами заклиниваются в зазорах между ведущим катком и сателлитами, создавая силы прижатия, пропорциональные перэдаваемому моменту. Вращение от распорных катков 3 через упругий обод передается к сателлитам. Установка упругого обода компенсирует скольжение в некоторых силовых потоках за счет упругого тангенциального скольжения материала обода, а установка его ведомым повышает КПД передачи в сравнении с таким же ведущим ободом. Вращение от сателлитов через внутренние контакты передается большому колесу и выходному валу. Силы сцепления, создаваемые распорными катками, замыкаются на рабочих поверхностях ведущего катка и центрального колеса, поэтому валы, оси, подшипники разгружены от этих сил. Для передачи момента от сателлитов к центральному колесу используется дополнительная сила прижатия, которая является реакцией опоры оси сателлита на наклонную плоскость паза опоры 9. Многопоточность редуктора обеспечивает трансформацию больших мощностей, а упругие обода - бесшумную работу и пониженные требования к точности изготовления параллельно работающих звеньев. Формула изобретения 1. Многопоточный фрикционный редуктор, содержащий корпус, установленный на входном валу ведущий каток с диаметром di, связанное с выходным валом центральное колесо внутреннего зацепления, установленные в корпусе опоры с тупоугольными вырезами, размещенные в последних осями двухвенЦовые сателлиты, меньшими диаметрами взаимодействующие с центральным колесом внутреннего зацепления, и обойму с подпружиненными в окружном направлении распорными катками, взаимодействующими с большими диаметрами двухвенцовых сателлитов, о т л и ч а ю щ и йся тем, что, с целью расширения кинематических возможностей и повцшения нагрузочной способности, обойма установлена с возможностью поворота для периодическо-. го подключения распорных катков к двух венцовым сателлитам, рабочие поверхнос ти последних выполнены из упругого материала, а распорные катки выполнены двухвенцовыми для взаимодействия большим диаметром d2 с ведущим катком и диаметры их выбраны из условия d2 Vi ds VM где .da-меньший диаметр распорного катка, Ijr- коэффициент сцепления ведущего и распорного катков; FI и Qi - касательная и сила прижатия между ведущим и распорным катками; Viz щ-коэффициент сцепления распорного катка и сателлита; F2 и Q2 - касательная и сила прижатия между распорным катком и сателлитом. 2. Редуктор по п. 1, о т л и ч а ю щ и и с я тем, что, с целью унификации корпусов для редукторов с различными передаточными отношениями, в корпусе выполнены радиальные пазы для размещения опор, последние выполнены в виде призмы, а редуктор снабжен размещенными в пазах между дном паза и основанием призмы прокладками, высота h которых выбрана из условияdt +d4 -hf-H-hi, где d4 - больший диаметр сателлита; Е- зазор между ведущим катком и больим диаметром сателлита; Н - расстояние от оси ведущего катка до на паза;i hi - расстояние от оси сателлита до осования призмы.

| название | год | авторы | номер документа |
|---|---|---|---|
| ТРАНСФОРМАТОР ВРАЩАЮЩЕГО МОМЕНТА | 1995 |
|
RU2115848C1 |
| ТРАНСФОРМАТОР МОМЕНТА | 1998 |
|
RU2160400C2 |
| ТРАНСФОРМАТОР ВРАЩАЮЩЕГО МОМЕНТА | 1999 |
|
RU2188973C2 |
| ВАРИАТОР | 1997 |
|
RU2131545C1 |
| ДВУХРОТОРНЫЙ ЭЛЕКТРОПРИВОД | 1994 |
|
RU2096892C1 |
| Многопоточный конусный вариатор | 1982 |
|
SU1073515A1 |
| ЭЛЕКТРОПРИВОД | 1994 |
|
RU2104606C1 |
| Многопоточный конусный вариатор | 1976 |
|
SU696218A1 |
| Многопоточный конусный вариатор | 1980 |
|
SU887838A2 |
| Каток упругофрикционной передачи | 1991 |
|
SU1816920A1 |

А-А
и 77
Фае. 2
| Авторское свидетельство СССР № 759780, кл.Р 16 Н 13/14, 1980.Авторское свидетельство СССР № 1486671, кл | |||
| Устройство для электрической сигнализации | 1918 |
|
SU16A1 |
| Кузнечная нефтяная печь с форсункой | 1917 |
|
SU1987A1 |
