Изобретение относится к исполнительным устройствам систем управления, а конкретно - комплексов формирования управляющего воздействия, предназначенным для преобразования входного электрического, пневматического, гидравлического или механического сигнала малой мощности в механическое управляющее воздействие большой мощности, и может быть использовано в системах автоматического или ручного управления транспортными средствами или технологическими процессами.
Известен электромеханический усилитель управляющего воздействия, описанный в книге под ред. В.В.Солодовникова «Элементы систем автоматического регулирования», М., Машгиз, 1959 г., часть 1, стр.681…697.
Данное устройство содержит мотор-генератор, генератор которого имеет независимое возбуждение, электродвигатель с редуктором и электромагнитную муфту. Входным сигналом является командный ток, подаваемый на обмотку возбуждения генератора, управляющим воздействием - вращение вала электромагнитной муфты. Реверс выходного вала осуществляется электромагнитной муфтой.
Недостатком этого усилителя управляющего воздействия является низкое быстродействие, зависимость скорости выходного звена от нагрузки, малый коэффициент усиления мощности и низкий КПД.
Известен электропневматический усилитель управляющего воздействия по патенту RU №2070714, 6 F42B 15/00, 11.08.1994, содержащий силовой цилиндр с поворотным поршнем, укрепленным на выходном валу, в полости которого подается сжатый воздух из источника низкого давления через электроуправляемый распределитель типа «сопло-заслонка».
Недостатком этого усилителя управляющего воздействия является малая мощность выходного сигнала и большой расход воздуха вследствие его значительных утечек в распределителе «сопло-заслонка».
Указанных недостатков лишен известный электроуправляемый усилитель управляющего воздействия с плоским распределительным золотником по патенту RU №2216654, 7 F15B 13/12, 13/04, 14.02.2002, управляющим подачей текучей рабочей среды из источника высокого давления в полости силового цилиндра, связанного с выходным валом.
Недостатком этого усилителя управляющего воздействия является сложность изготовления прецизионных конструктивных элементов и необходимость в источнике рабочей среды высокого давления.
Необходимость в источнике рабочей среды высокого давления отсутствует в принятом в качестве прототипа электрогидравлическом усилителе управляющего воздействия по патенту RU №2052673, 6 F15B 9/00, 26.07.82.
Усилитель управляющего воздействия содержит размещенные в корпусе регулируемый аксиально-поршневой гидронасос с электроприводом, регулирующий элемент которого связан с сервопоршнем, расположенном в цилиндре, имеющим командную полость, двухкаскадный электроуправляемый распределитель, гидродвигатель, имеющий поршень, размещенный в цилиндре и соединенный обратной связью с распределителем, выполненным в виде золотника с командным пояском и втулки с перегородкой на наружной поверхности, двумя рядами отверстий, одни из которых связаны с поршневыми полостями гидродвигателя, а другие - с отводящей магистралью, и центральными окнами, через одно разделенными перегородкой, образующей с корпусом две полости, одна из которых подключена к нагнетающей магистрали, а другая - к командной полости сервопоршня. Входным сигналом является электрический сигнал, поступающий на электроуправляемый распределитель, управляющим воздействием - перемещение поршня гидродвигателя.
Недостатками устройства является сложность конструкции и настройки, и недостаточная надежность из-за наличия большого количества технологически сложных и чувствительных к условиям эксплуатации гидравлических элементов.
Сущностью изобретения является упрощение конструкции и повышение надежности усилителя управляющего воздействия путем применения в качестве такового фрикционного вариатора по авторскому свидетельству СССР №217163, F16H 15/30, 1968 или патенту RU №2112169, 6 F16H 15/04, 15/26, 25.07.1996, снабженного силовым приводом и устройством управления передаточным отношением и включенного в дифференциальную кинематическую схему, имеющую в своем составе выходной вал.
Вариаторы по упомянутым документам содержат фрикционные звенья с пересекающимися осями вращения, установленные с возможностью изменения угла их пересечения, причем одно из звеньев имеет сферическую рабочую поверхность с центром в точке пересечения осей вращения, второе выполнено в виде обоймы с роликами, которые находятся во фрикционном контакте со сферической поверхностью и оси которых расположены в плоскости, проходящей через центр сферической поверхности и перпендикулярной оси вращения обоймы, а ролики прижимаются к сферической поверхности нажимным устройством, взаимодействующим с осями роликов (вариатор по авторскому свидетельству СССР №217163) или дополнительным звеном со сферической рабочей поверхностью, взаимодействующим с наружными поверхностями роликов (вариатор по патенту RU №2112169).
Управление передаточным отношением (отношением угловых скоростей звеньев) этих вариаторов осуществляется путем поворота оси вращения одного из фрикционных звеньев вокруг оси, перпендикулярной осям вращения звеньев и проходящей через точку их пересечения.
Входным сигналом в заявляемом усилителе управляющего воздействия может быть электрический, пневматический, гидравлический или механический сигнал, подаваемый на соответствующее устройство управления передаточным отношением вариатора.
Выходным управляющим воздействием является вращение выходного вала.
Энергия для получения выходного сигнала большой мощности поступает от силового привода. В качестве силового привода может быть использован электрический, гидравлический или пневматический (газовый) двигатель с выходным элементом в виде вращающегося вала. При наличии в объекте управления вала, имеющего постоянную угловую скорость и достаточную мощность, он также может быть использован в качестве силового привода.
Целесообразность применения в качестве усилителя управляющего воздействия вариаторов указанного типа определяется тем, что мощность их управляющего воздействия может превышать мощность входного сигнала более чем в 1000 раз, поскольку для управления их передаточным отношением путем поворота оси вращения фрикционного звена достаточно преодолеть сопротивление качения роликов одного фрикционного звена по сферической поверхности другого.
Целесообразность включения вариатора в дифференциальную кинематическую схему определяется возможностью при постоянной угловой скорости вала силового привода получать на выходном валу вращение с различными, управляемыми по величине и направлению угловыми скоростями (в том числе - с нулевой).
В технически обоснованных случаях (например, при малом требуемом ресурсе усилителя управляющего воздействия) целесообразно применение более простого вариатора по авторскому свидетельству СССР №217163 (с обеспечением фрикционного контакта нажимным устройством), в других случаях целесообразно применение вариатора по патенту RU №2112169 (с обеспечением фрикционного контакта дополнительным звеном со сферической рабочей поверхностью).
Для минимизации искажений выходного сигнала, вызванных кинематическими погрешностями некоторых звеньев дифференциальной кинематической схемы, в качестве последних могут быть использованы фрикционные передачи.
Для уменьшения количества кинематических звеньев и уменьшения габаритов и веса усилителя управляющего воздействия дифференциальная кинематическая схема может быть выполнена с размещением вариатора во вращающемся корпусе, кинематически связанном с силовым приводом.
Для упрощения устройства управления и уменьшения инерционных нагрузок на элементы конструкции дифференциальная кинематическая схема может быть выполнена с размещением вариатора в неподвижном корпусе и включением в схему отдельного дифференциального механизма.
Для увеличения коэффициента передачи усилителя управляющего воздействия вариатор может быть выполнен многоступенчатым.
Для оптимизации зависимости коэффициента передачи усилителя управляющего воздействия от величины входного сигнала в устройство управления могут быть введены нелинейные элементы.
Заявляемый усилитель управляющего воздействия при близких прототипу параметрах: быстродействии, коэффициенте передачи, коэффициенте усиления мощности и весогабаритных показателях, конструктивно и технологически проще прототипа (фактически он менее сложен, чем лишь один из элементов последнего - регулируемый аксиально-поршневой гидронасос), а благодаря отсутствию чувствительных к условиям эксплуатации гидравлических элементов он надежнее прототипа.
Примеры схем усилителя управляющего воздействия представлены на чертежах.
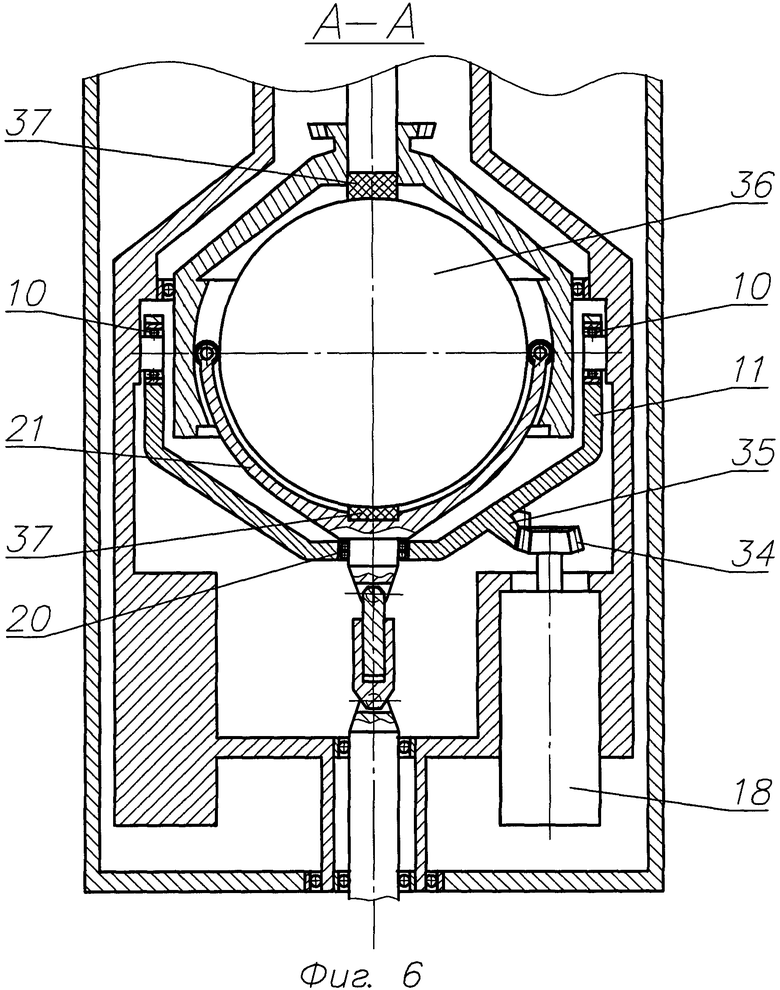
На фиг.1 показан электроуправляемый усилитель управляющего воздействия с электродвигателем в качестве силового привода и одноступенчатым вариатором по авторскому свидетельству СССР №217163, размещенным во вращающемся корпусе.
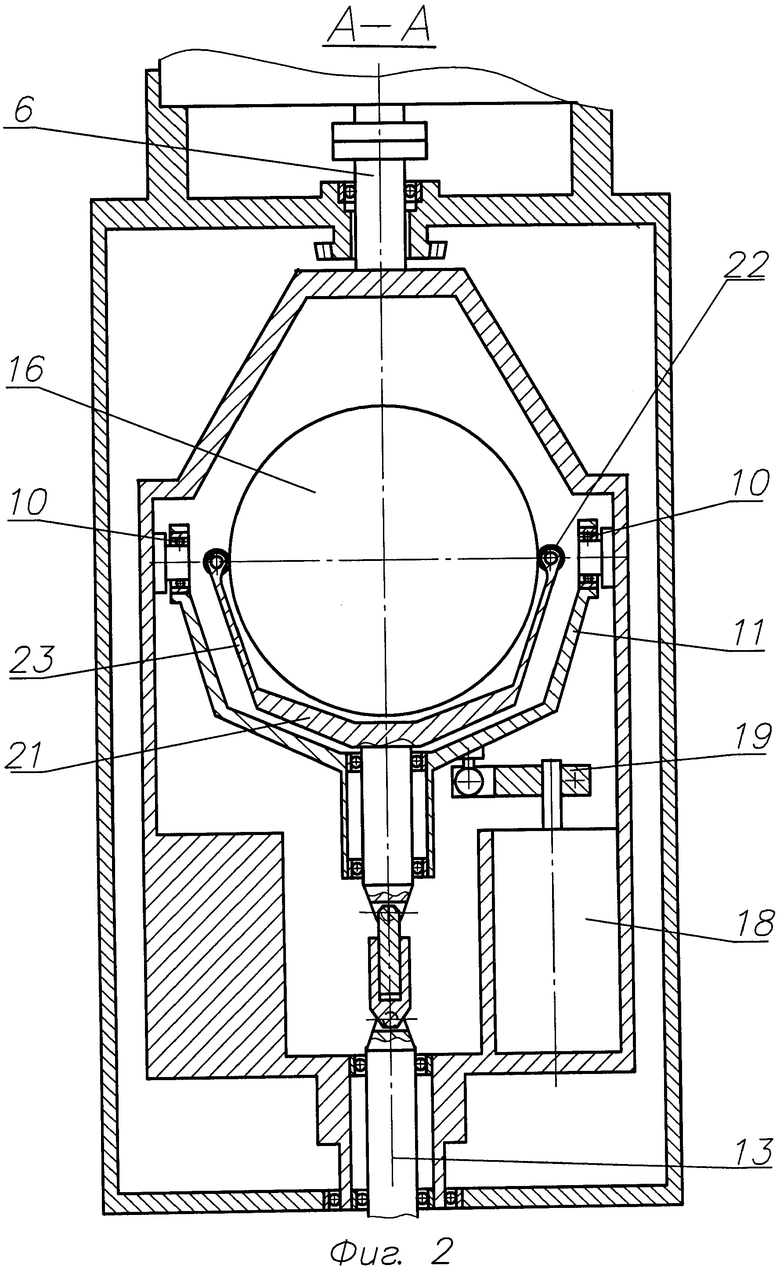
На фиг.2 показан разрез по А-А усилителя управляющего воздействия, показанного на фиг.1.
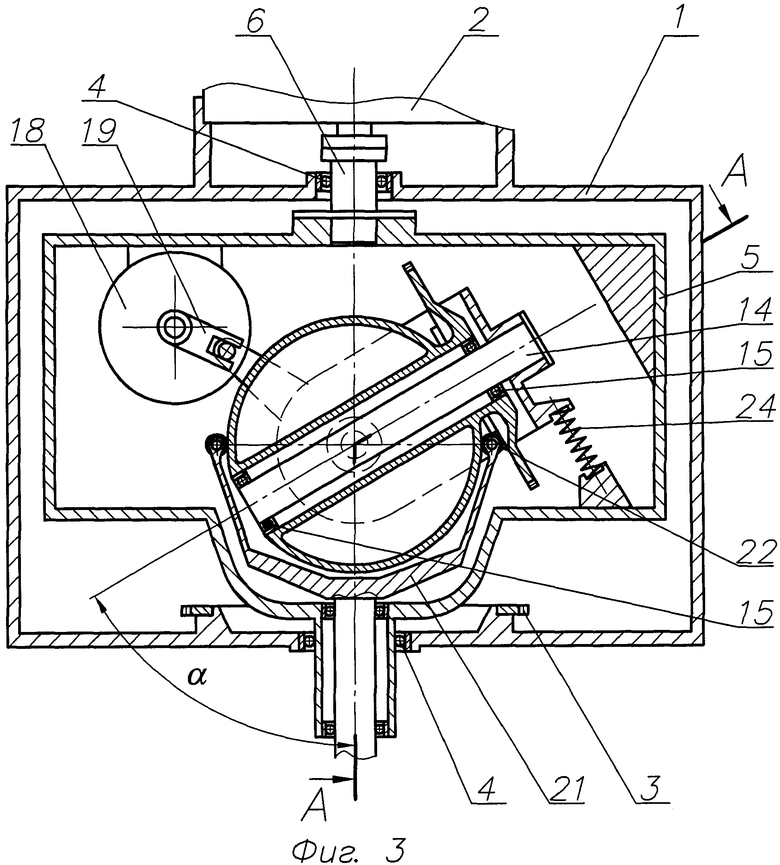
На фиг.3 показан электроуправляемый усилитель управляющего воздействия с электродвигателем в качестве силового привода и двухступенчатым вариатором по авторскому свидетельству СССР №217163, размещенным во вращающемся корпусе.
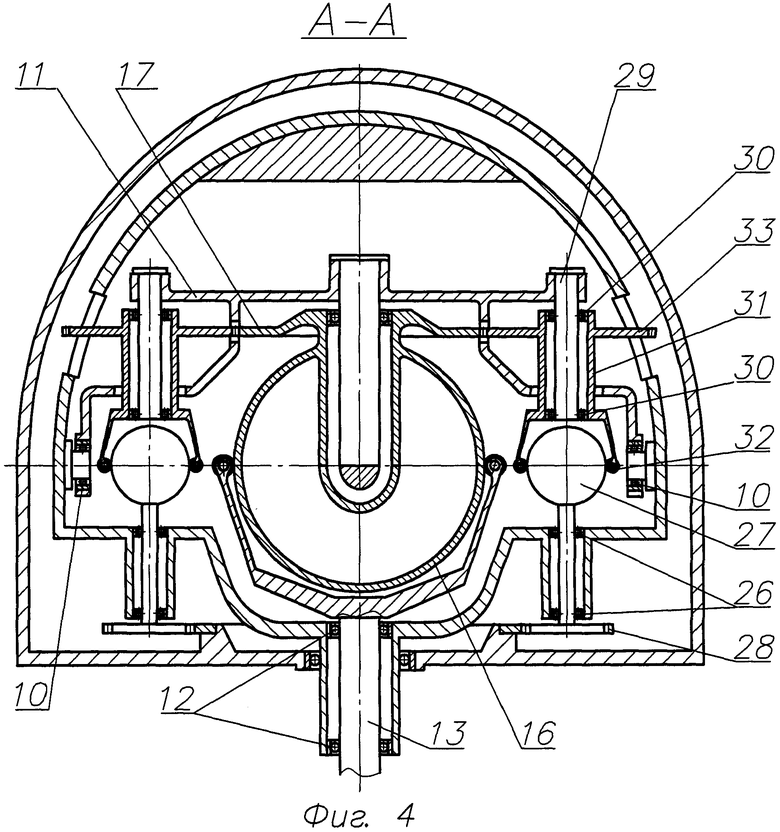
На фиг.4 показан разрез по А-А усилителя управляющего воздействия, показанного на фиг.3.
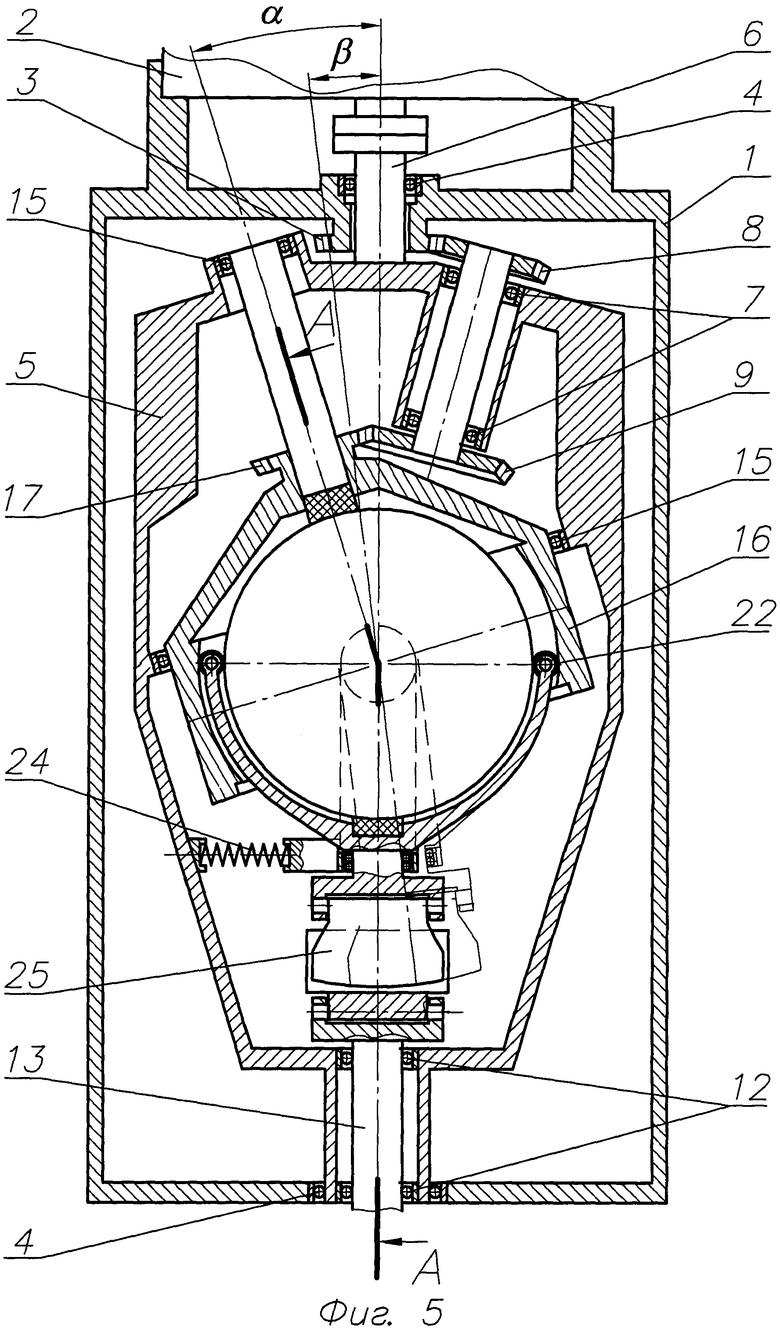
На фиг.5 показан электроуправляемый усилитель управляющего воздействия с электродвигателем в качестве силового привода и одноступенчатым вариатором по патенту RU №2112169, размещенным во вращающемся корпусе.
На фиг.6 показан разрез по А-А усилителя управляющего воздействия, показанного на фиг.5.
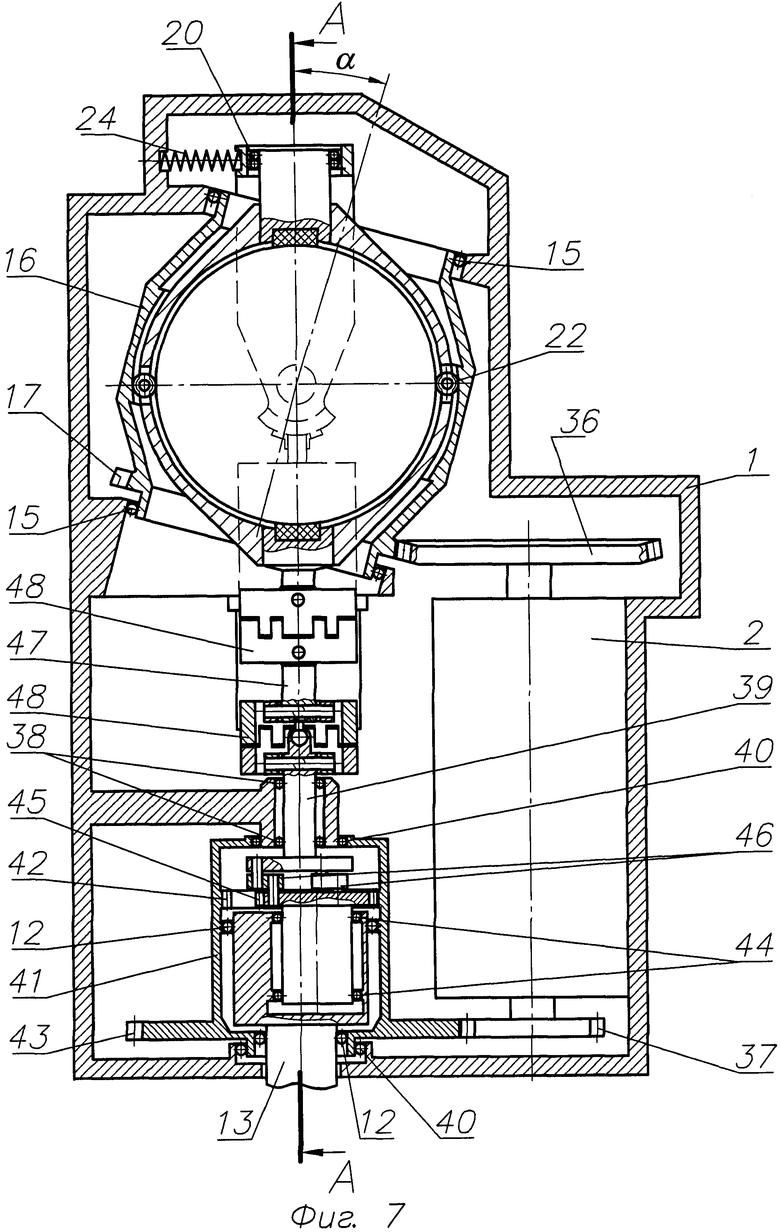
На фиг.7 показан электроуправляемый усилитель управляющего воздействия с электродвигателем в качестве силового привода и одноступенчатым вариатором по патенту RU №2112169, размещенным в неподвижном корпусе вместе с отдельным дифференциальным механизмом.
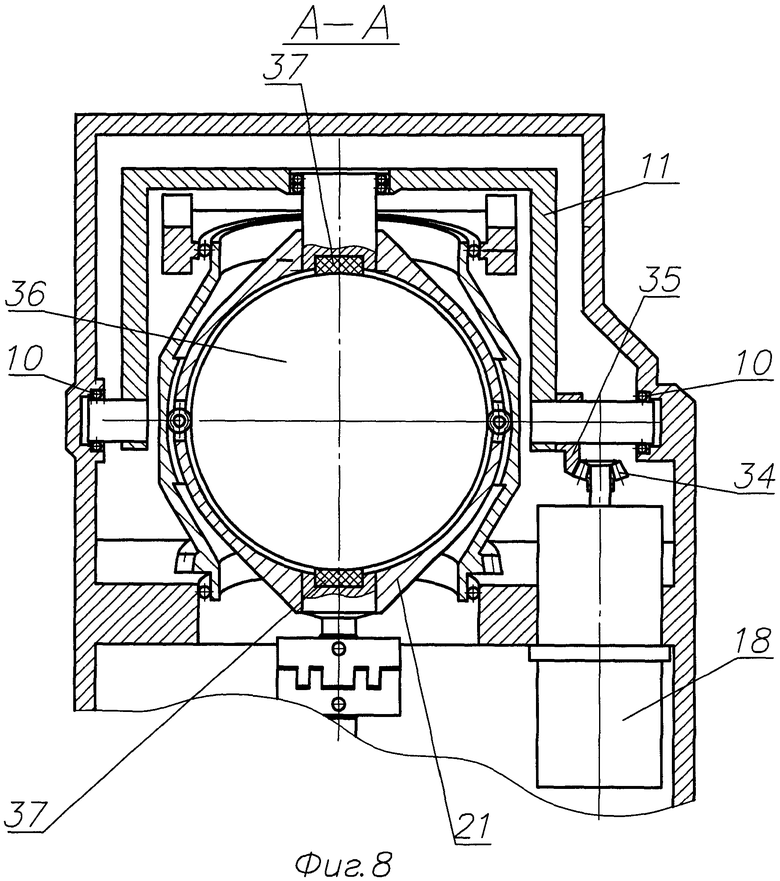
На фиг.8 показан разрез по А-А усилителя управляющего воздействия, показанного на фиг.7.
На фиг.1 и 2 представлена схема электроуправляемого усилителя управляющего воздействия с электродвигателем в качестве силового привода и одноступенчатым вариатором по авторскому свидетельству СССР №217163, размещенным во вращающемся корпусе.
Усилитель управляющего воздействия содержит корпус 1 с установленным на нем силовым электродвигателем 2. На корпусе 1 закреплена шестерня 3, он также снабжен подшипниками 4, на которых смонтирован вращающийся корпус 5 с валом 6, соединенным с валом силового электродвигателя 2. Во вращающемся корпусе 5 на подшипниках 7 установлен промежуточный вал с шестернями 8 и 9, на подшипниках 10 - поворотная рама 11, а на подшипниках 12 - выходной вал 13. Кроме того, во вращающемся корпусе 5 закреплена ось 14, на которой на подшипниках 15 смонтировано фрикционное звено 16 со сферической рабочей поверхностью, снабженное шестерней 17, взаимодействующей с шестерней 9 промежуточного вала, и размещен управляющий поворотный электромагнит 18, вал которого через рычаг 19 связан с поворотной рамой 11. В поворотной раме 11 на подшипниках 20 установлено фрикционное звено 21, выполненное в виде обоймы с роликами 22, находящимися с рабочей поверхностью звена 16 во фрикционном контакте, создаваемом нажимным устройством, выполненным в виде упруго деформированных рычагов 23. Ось подшипников 10 (ось поворота поворотной рамы) выполнена перпендикулярной осям вращения корпуса 5 и фрикционных звеньев 16 и 21 и пересекающейся с ними в центре сферической рабочей поверхности звена 16. Между поворотной рамой 11 и стенкой вращающегося корпуса 5 установлена пружина 24. Вал фрикционного звена 21 шарниром равных угловых скоростей 25, допускающим линейное и угловое смещение соединяемых валов (см., например, справочное пособие «Механизмы» под ред. С.Н.Кожевникова, М.: Машиностроение, 1976 г., стр.383…385, рис.6.9), связан с выходным валом 13.
Усилитель управляющего воздействия функционирует следующим образом.
Вращение вала электродвигателя 2 через вал 6 передается вращающемуся корпусу 5, что заставляет вращаться шестерню 8 и промежуточный вал, а вращение промежуточного вала через шестерни 9 и 17, фрикционные звенья 16 и 21 и шарнир равных угловых скоростей 25 передается выходному валу 13.
При отсутствии входного сигнала на управляющем электромагните 18 момент на его валу отсутствует, и поворотная рама 11 и ось вращения фрикционного звена 21 занимает положение, при котором момент, создаваемый усилием пружины 24, равен сумме моментов, создаваемых инерцией элементов, установленных на поворотной раме 11.
Упомянутое усилие пружины выбрано таким, чтобы при номинальной угловой скорости электродвигателя 2 и отсутствии входного сигнала на управляющем электромагните 18 ось вращения фрикционного звена 21 совпадала с осью вращения корпуса 5.
Угловая скорость (ω2)0 выходного вала 13, при отсутствии входного сигнала определяется соотношением:
(ω2)0=ω1(1-Z3Z9 cosα/Z8Z17), где
ω1 - угловая скорость вала 6;
Z3 - число зубьев шестерни 3;
Z8 - число зубьев шестерни 8;
Z9 - число зубьев шестерни 9;
Z17 - число зубьев шестерни 17;
α - угол между осями вращения взаимодействующих фрикционных звеньев при отсутствии входного сигнала.
Если числа зубьев шестерен выбраны с выполнением условия
Z3Z9/Z8Z17=1/cosα,
то при отсутствии входного сигнала имеет место
(ω2)0=0,
а при его наличии
ω2=ω1[1-cos(α+β)/cosα], где
ω2 - угловая скорость выходного вала 13;
β - угол между положением оси вращения фрикционного звена, установленного на поворотной раме, при наличии входного сигнала и ее положением при отсутствии входного сигнала.
Коэффициент передачи усилителя управляющего воздействия
К=dω2/dI=КЭ К1В, где
dI - входной сигнал на электромагните 18;
KЭ - коэффициент передачи электромагнита 18;
K1B - коэффициент передачи одноступенчатого вариатора,
K1B=dω2/dβ=ω1sin(α+β)/cosα.
На фиг.3 и 4 представлена схема электроуправляемого усилителя управляющего воздействия с электродвигателем в качестве силового привода и двухступенчатым вариатором по авторскому свидетельству СССР №217163, размещенным во вращающемся корпусе.
Усилитель управляющего воздействия содержит корпус 1 с установленным на нем силовым электродвигателем 2. На корпусе 1 закреплена шестерня 3, он также снабжен подшипниками 4, на которых смонтирован вращающийся корпус 5 с валом 6, соединенным с валом электродвигателя 2. Во вращающемся корпусе 5 на подшипниках 26 установлены два идентичных фрикционных звена 27 со сферическими рабочими поверхностями, снабженные шестернями 28, взаимодействующими с неподвижной шестерней 3, на подшипниках 10 установлена поворотная рама 11, а на подшипниках 12 - фрикционное звено 21, аналогичное звену 21, показанному на фиг.1 и 2, вал 13 которого является выходным. Кроме того, в корпусе 5 размещен управляющий поворотный электромагнит 18, вал которого через рычаг 19 связан с поворотной рамой 11. На поворотной раме 11 закреплена ось 14 и две оси 29. На подшипниках 15 оси 14 смонтировано фрикционное звено 16 со сферической рабочей поверхностью, снабженное шестерней 17. Для уменьшения суммарного момента инерции элементов, кинематически связанных с валом управляющего электромагнита 18, фрикционное звено 16 выполнено полым. На подшипниках 30 осей 29 смонтированы два одинаковых фрикционных звена 31, аналогичных звену 21, ролики 32 которых находятся во фрикционном контакте со сферическими рабочими поверхностями соответствующих звеньев 27. Фрикционные звенья 31 снабжены шестернями 33, взаимодействующими с шестерней 17. Ось подшипников 10 (ось поворота поворотной рамы) выполнена перпендикулярной осям вращения корпуса 5 и всех фрикционных звеньев (16, 21, 27 и 31) и пересекающейся с ними в центрах сферических рабочих поверхностей звеньев 16 и 27. При этом оси вращения корпуса 5 и фрикционных звеньев 21 и 27, как и оси вращения фрикционных звеньев 16 и 31, выполнены параллельными между собой. Между поворотной рамой 11 и стенкой вращающегося корпуса 5 установлена пружина 24.
Усилитель управляющего воздействия функционирует следующим образом.
Вращение вала электродвигателя 2 через вал 6 передается вращающемуся корпусу 5, что заставляет вращаться фрикционные звенья 27, шестерни 28 которых взаимодействуют с неподвижной шестерней 3. Вращение фрикционных звеньев 27 передается взаимодействующим с ними фрикционным звеньям 31 и через шестерни 33 и 17 передается фрикционному звену 16, а от него - взаимодействующему с ним фрикционному звену 21 и выходному валу 13.
При отсутствии входного сигнала на управляющем электромагните 18 момент на его валу отсутствует, и поворотная рама 11 и оси вращения фрикционных звеньев 16 и 31 занимают положение, при котором момент, создаваемый усилием пружины 24, равен сумме моментов, создаваемых инерцией элементов, установленных на поворотной раме 11.
Угловая скорость выходного вала 13 при отсутствии входного сигнала определяется соотношением:
(ω2)0=ω1(1-Z3Z33cos2α/Z28Z17), где
Z28 - число зубьев шестерни 28;
Z33 - число зубьев шестерни 33.
Если числа зубьев шестерен выбраны с соблюдением условия:
Z3Z33/Z28Z17=1/cos2α,
то при отсутствии входного сигнала имеет место
(ω2)0=0,
а при его наличии
ω2=ω1[1-cos2(α+β)/cos2α].
Коэффициент передачи двухступенчатого вариатора,
K2B=dω2/dβ=2ω1[sin(α+β)/cos2α], или
K2B=2K1B/cosα,
из чего видно, что при одинаковых значениях (см. стр.9) КЭ, α, β и ω1 коэффициент передачи усилителя управляющего воздействия с двухступенчатым вариатором превосходит коэффициент передачи усилителя управляющего воздействия с одноступенчатым вариатором более чем вдвое.
Для уменьшения различий в коэффициентах передачи К2В при углах β разных знаков кинематическая связь электромагнита 18 с поворотной рамой выполнена несимметричной.
На фиг.5 и 6 представлена схема электроуправляемого усилителя управляющего воздействия с электродвигателем в качестве силового привода и одноступенчатым вариатором по патенту RU №2112169, размещенным во вращающемся корпусе.
Усилитель управляющего воздействия содержит корпус 1 с установленным на нем силовым электродвигателем 2. На корпусе 1 закреплена шестерня 3, он также снабжен подшипниками 4, на которых смонтирован вращающийся корпус 5 с валом 6, соединенным с валом электродвигателя 2. Во вращающемся корпусе 5 на подшипниках 7 установлен промежуточный вал с шестернями 8 и 9, на подшипниках 10 - поворотная рама 11, на подшипниках 12 - выходной вал 13, а на подшипниках 15 смонтировано фрикционное звено 16 с внутренней сферической рабочей поверхностью, снабженное шестерней 17, взаимодействующей с шестерней 9 промежуточного вала. Кроме того, во вращающемся корпусе 5 размещен управляющий электродвигатель 18, вал которого шестерней 34 и зубчатым сектором 35 связан с поворотной рамой 11. На поворотной раме 11 установлено фрикционное звено 21, выполненное в виде обоймы с роликами 22, находящимися с рабочей поверхностью звена 16 во фрикционном контакте, создаваемом дополнительным сферическим звеном 36, взаимодействующим с роликами 22 и центрирующими опорами 37. Опорами фрикционного звена 21 является подшипник 20 и внутренняя сферическая рабочая поверхность фрикционного звена 16. Ось подшипников 10 (ось поворота поворотной рамы) выполнена перпендикулярной осям вращения корпуса 5 и фрикционных звеньев 16 и 21 и пересекающейся с ними в центре сферической рабочей поверхности звена 16. Между поворотной рамой 11 и стенкой вращающегося корпуса 5 установлена пружина 24.
Вал фрикционного звена 21 шарниром равных угловых скоростей 25, допускающим линейное и угловое смещение соединяемых валов связан с выходным валом 13.
Усилитель управляющего воздействия функционирует идентично описанному выше (стр.7…8) устройству с вариатором по авторскому свидетельству СССР №217163.
На фиг.7 и 8 представлена схема электроуправляемого усилителя управляющего воздействия с электродвигателем в качестве силового привода и одноступенчатым вариатором по патенту RU №2112169, размещенным в неподвижном корпусе вместе с включенным в кинематическую схему отдельным дифференциальным механизмом.
В корпусе 1 усилителя управляющего воздействия размещен силовой электродвигатель 2 с шестернями 36 и 37 на его валу и управляющий электродвигатель 18 с шестерней 34 на валу. На подшипниках 15 корпуса 1 смонтировано фрикционное звено 16 с внутренней сферической рабочей поверхностью, снабженное шестерней 17, взаимодействующей с шестерней 36, на подшипниках 10 - поворотная рама 11 с зубчатым сектором 35, взаимодействующим с шестерней 34, на подшипниках 38 - вал 39 дифференциального механизма, на подшипниках 40 - корпус 41 дифференциального механизма с шестерней 42 с внутренними зубьями и шестерней 43, взаимодействующей с шестерней 37. На поворотной раме 11 установлено фрикционное звено 21, выполненное в виде обоймы с роликами 22, находящимися с рабочей поверхностью звена 16 во фрикционном контакте, создаваемом дополнительным сферическим звеном 36, взаимодействующим с роликами 22 и центрирующими опорами 37. Опорами фрикционного звена 21 является подшипник 20 и внутренняя сферическая рабочая поверхность фрикционного звена 16. В корпусе дифференциального механизма 41 на подшипниках 12 установлен выходной вал 13, во внутренней полости которого на подшипниках 44, ось которых параллельна оси вала 13 и смещена относительно ее, смонтирован сателлит 45, кинематически связанный с валом 39 шатунной передачей 46 и взаимодействующий с шестерней 43. Фрикционное звено 21 валом 47 и двумя шарнирами равных угловых скоростей 48, выполненными в виде сдвоенных карданных шарниров, кинематически связано с валом 39 дифференциального механизма. Ось подшипников 10 (ось поворота поворотной рамы) выполнена перпендикулярной осям вращения фрикционных звеньев 16 и 21 и пересекающейся с ними в центре сферической рабочей поверхности звена 16. Выходной вал 13, корпус дифференциального механизма 41 и вал 39 установлены соосно и их ось вращения проходит через центр сферической рабочей поверхности фрикционного звена 16. Между поворотной рамой 11 и стенкой корпуса 1 установлена пружина 24.
Усилитель управляющего воздействия функционирует следующим образом.
Вращение вала электродвигателя 2 через шестерни 36 и 17 передается фрикционному звену 16 и взаимодействующему с ним фрикционному звену 21, а от него, через вал 47 с шарнирами равных угловых скоростей 48, вращение передается валу 39 дифференциального механизма и, через шатунную передачу 46, - сателлиту 45. Одновременно вращение вала электродвигателя 2 через шестерни 37 и 43 передается корпусу дифференциального механизма 41 с шестерней 42 и суммируется с вращением сателлита 45, результатом чего является вращение выходного вала 13.
При отсутствии входного сигнала на управляющем электромагните 18 момент на его валу отсутствует, и поворотная рама 11 и ось вращения фрикционного звена 21 занимает положение, при котором момент, создаваемый усилием пружины 24, равен моменту, создаваемому инерцией неравномерно вращающихся роликов 22. Упомянутое усилие пружины выбрано таким, чтобы при номинальной угловой скорости электродвигателя 2 и отсутствии входного сигнала на управляющем электромагните 18 ось вращения фрикционного звена 21 совпадала с общей осью вращения выходного вала 13, корпуса дифференциального механизма 41 и вала 39.
Угловая скорость выходного вала 13 при отсутствии входного сигнала определяется соотношением:
(ω2)0=ω1(Z36Z45cosα/Z17Z42-Z37/Z43)/(1-Z45/Z42), где
Z36 - число зубьев шестерни 36,
Z37 - число зубьев шестерни 37,
Z43 - число зубьев шестерни 43,
Z45 - число зубьев сателлита 45,
Z42 - число зубьев шестерни 42.
Если числа зубьев шестерен выбраны с соблюдением условия
Z36Z45cosα/Z17Z42=Z37/Z43,
то при отсутствии входного сигнала имеет место
(ω2)0=0,
а при его наличии
ω2=-[Z37/Z43(1-Z45/Z42)]·ω1[1-cos(α+β)/cosα]
и коэффициент передачи одноступенчатого вариатора с отдельным дифференциальным механизмом,
К1В=dω2/dβ=-[Z37/Z43(1-Z45/Z42)]·ω1sin(α+β)/cosα.
| название | год | авторы | номер документа |
|---|---|---|---|
| ФРИКЦИОННЫЙ ВАРИАТОР | 1996 |
|
RU2112169C1 |
| ЖИДКОСТНО-КОЛЬЦЕВАЯ МАШИНА | 2004 |
|
RU2271453C2 |
| Устройство для перемещения деталей по заданному контуру на швейной машине | 1980 |
|
SU885375A1 |
| ШИРОКОДИАПАЗОННАЯ РЕВЕРСИВНАЯ ТРАНСМИССИЯ | 2020 |
|
RU2729847C1 |
| ЗУБЧАТО-РЫЧАЖНЫЙ ВАРИАТОР | 1998 |
|
RU2147701C1 |
| Мотор-колесо транспортного средства | 2023 |
|
RU2813165C1 |
| Мотор-колесо | 2023 |
|
RU2816724C1 |
| КОРОБКА ПЕРЕДАЧ | 1992 |
|
RU2068516C1 |
| УСТРОЙСТВО БЕССТУПЕНЧАТОГО ВАРИАТОРА С ПРИВОДОМ ВЕДУЩЕГО ЗВЕНА ЧЕРЕЗ РЫЧАГИ И ИЗМЕНЯЕМУЮ ТОЧКУ ПРИЛОЖЕНИЯ ВНЕШНИХ СИЛ ВРАЩЕНИЯ | 2013 |
|
RU2578797C2 |
| ЗУБЧАТО-РЫЧАЖНЫЙ ВАРИАТОР | 1998 |
|
RU2137966C1 |
Усилитель относится к исполнительным устройствам систем управления, предназначенным для преобразования входного сигнала малой мощности в механическое воздействие большой мощности и может быть использован в системах автоматического или ручного управления. Применение фрикционного вариатора, содержащего фрикционные звенья с пересекающимися осями вращения, установленные с возможностью изменения угла их пересечения, причем одно из звеньев имеет сферическую рабочую поверхность с центром в точке пересечения осей вращения, второе выполнено в виде обоймы с роликами, которые находятся во фрикционном контакте со сферической поверхностью и оси которых расположены в плоскости, проходящей через центр сферической поверхности и перпендикулярной оси вращения обоймы, снабженного силовым приводом и устройством управления величиной угла пересечения осей вращения фрикционных звеньев и включенного в дифференциальную кинематическую схему, имеющую в своем составе выходной вал, в качестве усилителя управляющего воздействия. Технический результат - упрощение конструкции и повышение надежности усилителя управляющего воздействия. 4 з.п. ф-лы, 8 ил.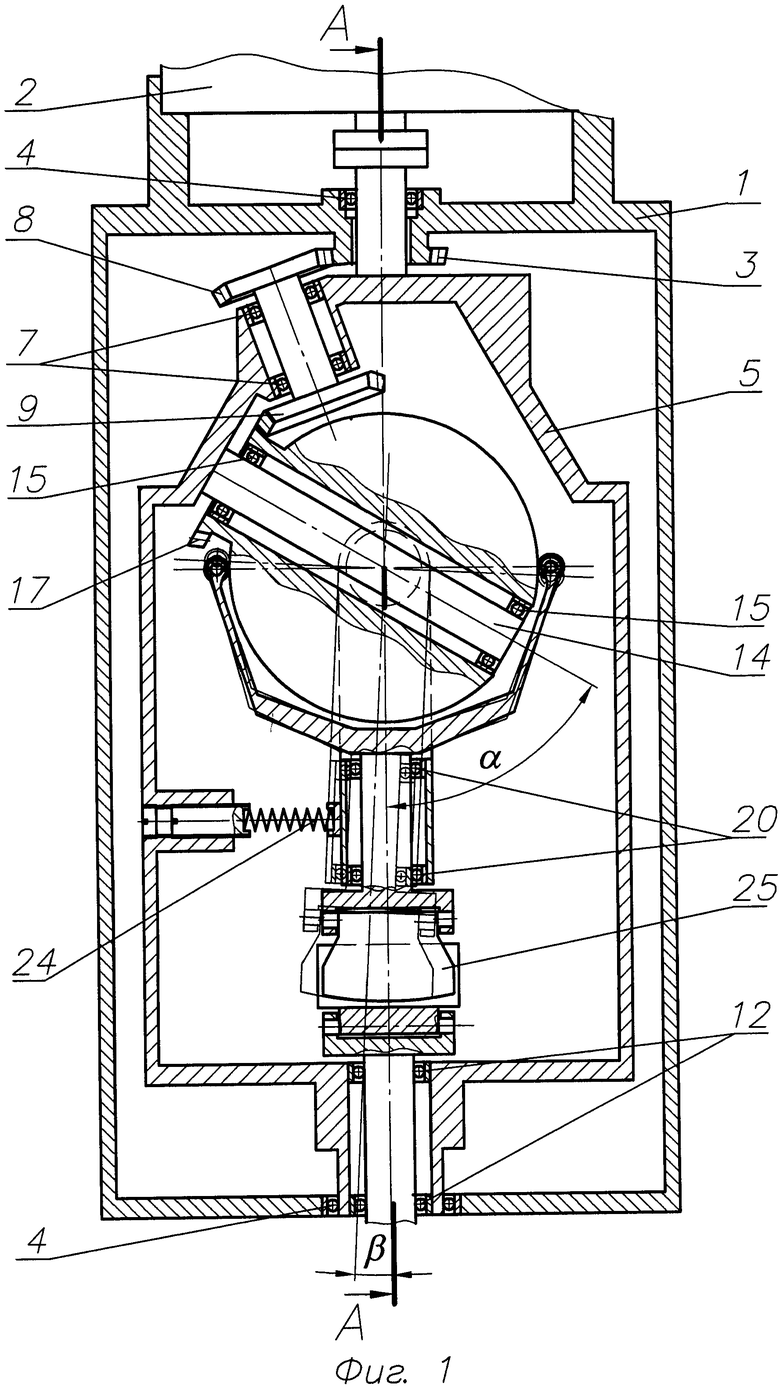
1. Применение фрикционного вариатора, содержащего фрикционные звенья с пересекающимися осями вращения, установленные с возможностью изменения угла их пересечения, причем одно из звеньев имеет сферическую рабочую поверхность с центром в точке пересечения осей вращения, второе выполнено в виде обоймы с роликами, которые находятся во фрикционном контакте со сферической поверхностью и оси которых расположены в плоскости, проходящей через центр сферической поверхности и перпендикулярной оси вращения обоймы, снабженного силовым приводом и устройством управления величиной угла пересечения осей вращения фрикционных звеньев и включенного в дифференциальную кинематическую схему, имеющую в своем составе выходной вал, в качестве усилителя управляющего воздействия.
2. Применение фрикционного вариатора по п.1, отличающегося тем, что в дифференциальной кинематической схеме использованы фрикционные передачи, в качестве усилителя управляющего воздействия.
3. Применение фрикционного вариатора по п.1, отличающегося тем, что дифференциальная кинематическая схема выполнена с размещением вариатора во вращающемся корпусе, кинематически связанном с силовым приводом, в качестве усилителя управляющего воздействия.
4. Применение фрикционного вариатора по п.1, отличающегося тем, что дифференциальная кинематическая схема выполнена с размещением вариатора в неподвижном корпусе и включением в схему отдельного дифференциального механизма, в качестве усилителя управляющего воздействия.
5. Применение фрикционного вариатора по п.1, отличающегося тем, что вариатор выполнен многоступенчатым, в качестве усилителя управляющего воздействия.
| Регулируемая передача Жунисбекова П. | 1987 |
|
SU1788365A1 |
| EP 0456503 A1, 13.11.1991 | |||
| US 4382188 A, 03.05.1983 | |||
| ФРИКЦИОННЫЙ ВАРИАТОР СКОРОСТИ | 0 |
|
SU217163A1 |
| ФРИКЦИОННЫЙ ВАРИАТОР | 1996 |
|
RU2112169C1 |

