Изобретение относится к точному приборостроению и может быть использовано в контрольно-измерительной технике, в частности в микроскопах сравнения и стереоскопических микроскопах.
Известно устройство перемещения держателя объекта, содержащее неподвижное основание с направляющими вертикального перемещения, корпус, установленный на направляющих основания с возможностью вертикального перемещения, держатель объекта, установленный с возможностью перемещения по двум взаимно перпендикулярным координатным осям в горизонтальной плоскости и вращения вокруг вертикальной оси по направляющей, связанной с корпусом, причем направляющая вращения держателя связана с корпусом через сферический шарнир и установлена с возможностью наклона ее оси относительно вертикали [1]. Устройство обеспечивает отсчет перемещения держателя по трем координатам и отсчет его вращения вокруг вертикальной оси.
Недостатком данного устройства является невозможность отсчета наклона держателя относительно горизонтальной плоскости, что обусловлено применением для этих целей в устройстве сферического шарнира. Этот недостаток приводит к тому, что невозможно повторно точно установить объект в то же положение, т. е. точно повторить условия его исследования, что ограничивает функциональные возможности устройства. Другим недостатком устройства является конструктивное выполнение элементов, исключающее возможность освещения объекта проходящим светом (освещение объекта, например, документа снизу).
Наиболее близким техническим решением к заявляемому является устройство перемещения держателя объекта, содержащее неподвижное основание с направляющими вертикального перемещения и зубчатой рейкой, корпус, установленный на направляющих основания с возможностью вертикального перемещения, с закрепленным на нем с возможностью вращения зубчатым колесом, кинематически связанным с рейкой основания, и держатель объекта, установленный с возможностью перемещения по двум взаимно перпендикулярным координатным осям в горизонтальной плоскости при помощи зубчато-реечного и винтового приводов и вращения вокруг вертикальной оси по направляющей, связанной с корпусом. Устройство обеспечивает отсчет величины перемещения держателя по трем координатам, отсчет угла его вращения вокруг его вертикальной оси, а также обеспечивает возможность исследования объекта как в отраженном, так и в проходящем свете [2].
Недостатком устройства является отсутствие возможности обеспечения наклона держателя относительно горизонтальной плоскости и отсчета угла этого наклона.
В основу изобретения положена задача разработки устройства, обеспечивающего шесть степеней свободы для держателя объекта с возможностью определения величины линейного и углового перемещения по всем направлениям.
Сущность изобретения заключается в том, что в устройстве перемещения держателя объекта, содержащем неподвижное основание с направляющими вертикального перемещения и зубчатой рейкой, корпус, установленный на направляющих основания с возможностью вертикального перемещения, с закрепленным на нем с возможностью вращения зубчатым колесом, кинематически связанным с рейкой основания, и держатель объекта, установленный с возможностью перемещения по двум взаимно перпендикулярным координатным осям в горизонтальной плоскости при помощи зубчато-реечного и винтового приводов и вращения вокруг вертикальной оси по направляющей, связанной с корпусом, между корпусом и направляющей вращения держателя вокруг вертикальной оси введены оправа, установленная с возможностью линейного перемещения по направляющим, выполненным в виде первого и второго параллельных валов, закрепленных в корпусе с возможностью осевого вращения, первый вал выполнен полым с продольным пазом и установленным на нем с возможностью линейного перемещения червяком, закрепленным на оправе с возможностью вращения, косозубое или червячное колесо со втулкой, кинематически связанное с червяком и установленное в оправе с возможностью вращения вокруг оси, перпендикулярной плоскости, проходящей через вертикальную ось и ось полого вала, и каретка, установленная во втулке с возможностью линейного перемещения вдоль оси втулки, а направляющая вращения держателя вокруг вертикальной оси закреплена на каретке с возможностью поворота вокруг оси, параллельной оси полого вала, причем винтовой привод расположен внутри полого вала и гайка привода через продольный паз полого вала соединена с червяком, зубчатое колесо зубчато-реечного привода закреплено на втором валу, а рейка этого привода закреплена на каретке и выполнена в сечении в виде части круга, центр которого совпадает с осью вращения косозубого или червячного колеса.
Каретка соединена с направляющей вращения держателя вокруг вертикальной оси посредством подшипника скольжения, образованного цилиндрическими поверхностями сегментной щечки, закрепленной на направляющей вращения держателя, и части глухого отверстия, выполненного в каретке, причем ось цилиндрических поверхностей сегментной щечки и глухого отверстия пересекается с осью вращения косозубого или червячного колеса и перпендикулярна ей.
Зубчатое колесо зубчато- реечного привода закреплено на втором валу с возможностью линейного перемещения и соединено с оправой с возможностью вращения.
Червяк, зубчатое колесо зубчато-реечного привода и, соответственно, первый и второй валы установлены в оправе с гарантированным зазором между внутренней цилиндрической поверхностью червяка и зубчатого колеса и, соответственно, наружной поверхностью первого и второго валов в любом сечении, перпендикулярном их оси.
Введение в устройство между направляющей вращения держателя и корпусом оправы, установленной с возможностью линейного перемещения по направляющим, выполненным в виде первого и второго параллельных валов, закрепленных в корпусе с возможностью осевого вращения, выполнение первого вала полым с продольным пазом и установленным на нем с возможностью линейного перемещения червяком, закрепленным на оправе с возможностью вращения, косозубого или червячного колеса со втулкой, кинематически связанного с червяком и установленного в оправе с возможностью вращения вокруг оси, перпендикулярной плоскости, проходящей через вертикальную ось и ось полого вала, и каретки, установленной во втулке с возможностью линейного перемещения вдоль ее оси, а также закрепление направляющей вращения держателя на каретке с возможностью поворота вокруг оси, параллельной оси полого вала, обеспечивает возможность перемещения держателя по трем взаимно перпендикулярным координатным осям X, Y,Z и поворота его вокруг каждой из этих осей на угол ϕx, ϕy, ϕz, , т.е. обеспечивает шесть степеней свободы перемещения держателя объекта. Размещение винтового привода внутри полого вала, соединение его гайки через продольный паз полого вала с червяком, закрепление зубчатого колеса зубчато-реечного привода на втором валу, а рейки этого привода - на каретке, и выполнение рейки в сечении в виде части круга, ось которого совпадает с осью вращения косозубого или червячного колеса, позволяет при повороте держателя вокруг оси косозубого или червячного колеса обкатываться зубьями рейки, закрепленной на каретке, по зубьям зубчатого колеса, закрепленного на втором валу, не выходя из зацепления, а при перемещении держателя и оправы вдоль оси первого вала - скользить зубьям рейки по зубьям зубчатого колеса, закрепленного на втором валу, также не выходя из зацепления, т.е. обеспечивает независимое перемещение держателя по любому направлению, и возможность количественной оценки этого перемещения. Все перечисленное обеспечивает шесть степеней свободы перемещения держателя объекта с возможностью определения величины линейного и углового перемещения по всем направлениям, и позволяет тем самым расширить функциональные возможности устройства.
Выполнение соединения каретки с направляющей вращения держателя в виде подшипника скольжения, образованного цилиндрическими поверхностями сегментной щечки, закрепленной на направляющей вращения держателя, и части глухого отверстия, выполненного в каретке, и их размещение так, что ось цилиндрических поверхностей сегментной щечки и глухого отверстия пересекается с осью вращения косозубого или червячного колеса и перпендикулярна ей, обеспечивает возможность совмещения плоскости предметов держателя с плоскостью, проходящей через оси вращения косозубого или червячного колеса и указанного подшипника скольжения, и тем самым, позволяет при любых поворотах держателя вокруг указанных осей в точке их пересечения четко наблюдать исследуемый фрагмент объекта при помощи микроскопа, т.е. позволяет дополнительно расширить функциональные возможности устройства.
Закрепление зубчатого колеса на втором валу с возможностью линейного перемещения и соединение его с оправой с возможностью вращения, позволяет при перемещении держателя и оправы вдоль оси второго вала исключить скольжение друг по другу зубьев колеса и рейки зубчато-реечного привода, т.е. дополнительно позволяет уменьшить трение и, соответственно, снизить требования к точности изготовления колеса и рейки.
Размещение червяка, зубчатого колеса и, соответственно, первого и второго валов в оправе с гарантированным зазором между внутренней цилиндрической поверхностью червяка и зубчатого колеса и, соответственно, наружной поверхностью первого и второго валов в любом сечении, перпендикулярном их оси, позволяет при перемещении держателя и оправы вдоль оси валов исключить касание указанных поверхностей. Т.е. дополнительно позволяет уменьшить трение и снизить требования к точности изготовления внутренних цилиндрических поверхностей червяка и зубчатого колеса.
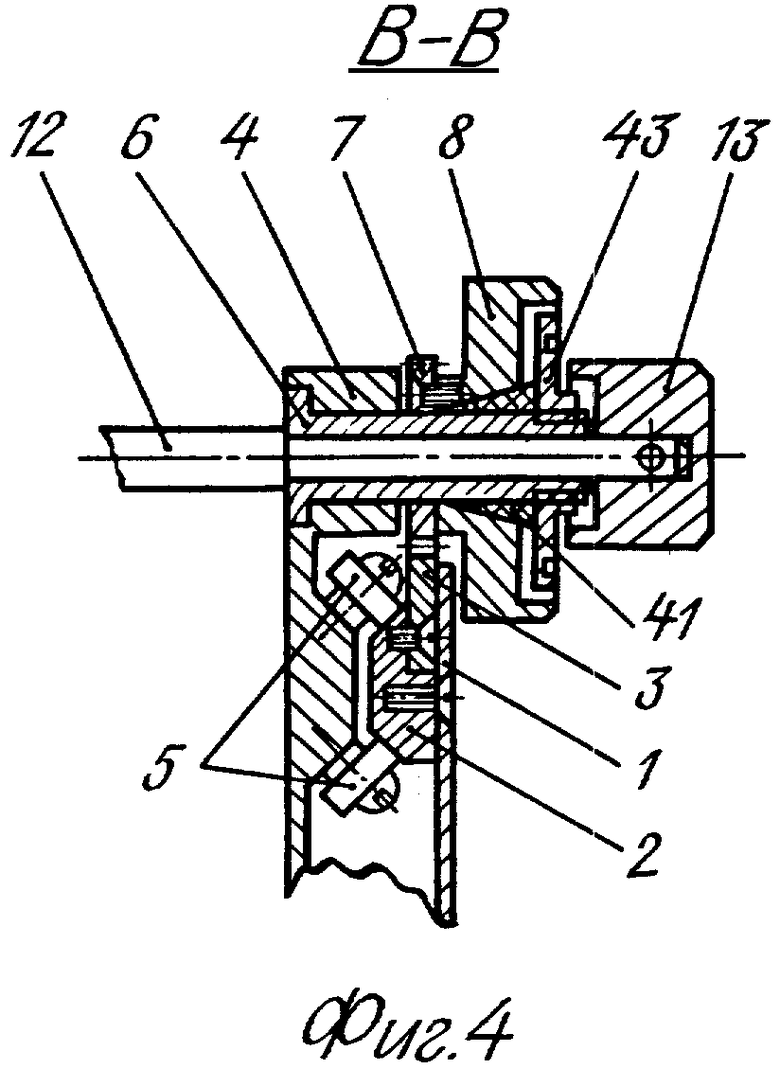
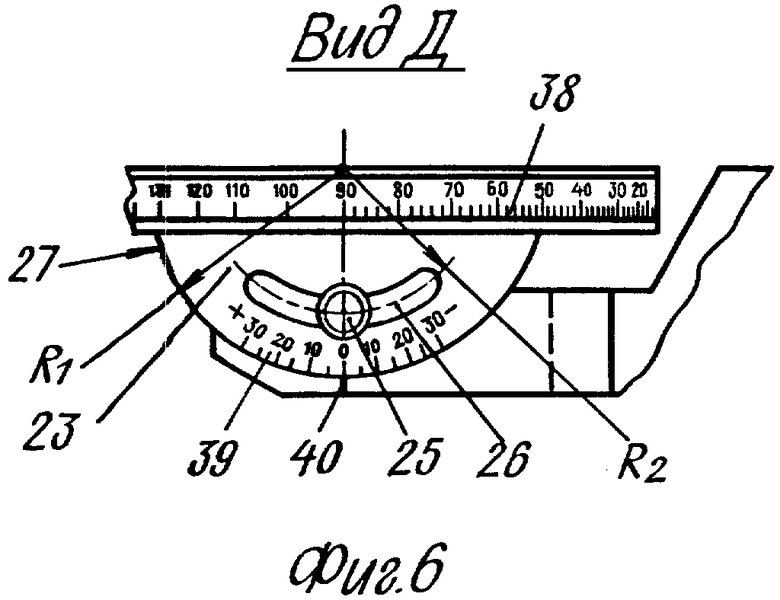
На фиг. 1 изображено предлагаемое устройство в разрезе плоскостью, перпендикулярной оси первого и второго валов; на фиг. 2 - сечение А-А на фиг. 1; на фиг. 3 - сечение Б-Б на фиг. 1; на фиг. 4 - сечение В-В на фиг. 2; на фиг. 5 - сечение Г-Г на фиг. 1; на фиг. 6 - вид Д на фиг. 5.
Устройство перемещения держателя объекта содержит неподвижное основание 1 с направляющими 2 вертикального перемещения и зубчатой рейкой 3. На направляющих 2 установлен корпус 4, который при помощи подшипников качения 5 имеет возможность перемещения по направляющим 2. В корпус 4 запрессована втулка 6, на которой установлено с возможностью вращения зубчатое колесо 7, соединенное с маховиком 8 и кинематически связанное с рейкой 3. Параллельно оси втулки 6 в корпусе 4 установлен с возможностью вращения полый вал 9 с продольным пазом 10 и маховиком 11. Во втулке 6 установлен второй вал 12 с закрепленным на нем маховиком 13. На валах 9 и 12 установлена с возможностью перемещения вдоль их осей оправа 14, в которой коаксиально полому валу 9 с возможностью вращения установлен червяк 15. В оправе 14 установлено косозубое или червячное колесо 16 со втулкой 17 с возможностью вращения вокруг оси, перпендикулярной плоскости, проходящей через вертикальную ось и ось полого вала 9. Колесо 16 кинематически связано с червяком 15 и жестко закреплено на втулке 17. Фланец 18, соединенный со втулкой 17, предохраняет ее от осевого смещения. Во втулке 17 с возможностью перемещения вдоль ее оси по прямоугольному в сечении отверстию 19 установлена каретка 20. На каретке 20 закреплена направляющая вращения 21 с держателем 22 объекта с возможностью поворота вокруг оси, параллельной оси вала 9, при помощи двух сегментных щечек 23, параллельно друг другу закрепленных на направляющей 21 и установленных в углублениях в виде части глухих отверстий 24 каретки 20, и фиксирующих винтов 25, соединенных с кареткой 20 и проходящих через паз 26 сегментных щечек 23. Паз 26 выполнен концентрично цилиндрической поверхности 27 щечек 23. Внутри полого вала 9 установлен винтовой привод, гайка 28 которого через продольный паз 10 жестко соединена винтом 29 с червяком 15, а ходовой винт 30 жестко соединен с маховиком 31, установленным с возможностью вращения относительно маховика 11. Устройство содержит также зубчато-реечный привод, зубчатое колесо 32 которого установлено с возможностью вращения в оправе 14 коаксиально второму валу 12 с возможностью перемещения вдоль его оси при помощи штифта 33 и направляющего продольного паза 34, выполненного в валу 12. Рейка 35 указанного привода жестко закреплена на каретке 20 и выполнена в сечении в виде полукруга, ось которого совпадает с осью вращения колеса 16.
Зубчатое колесо 32, червяк 15 и, соответственно, валы 12 и 9 установлены в оправе 14 с гарантированным зазором между внутренней цилиндрической поверхностью колеса 32 и червяка 15 и наружной поверхностью валов 12 и 9.
Держатель 22 объекта выполнен с центральным сквозным отверстием и крепежными элементами для закрепления специальных держателей для пуль, гильз и т. п. (не показано) и установлен на направляющей 21 с возможностью вращения вокруг вертикальной оси, при помощи закрепленной на направляющей трубки 36 и закрепленного на держателе 22 кольца 37 с внутренним зубчатым зацеплением. На наружной цилиндрической поверхности кольца 37 нанесена шкала 38 углов поворота ϕz держателя 22, а на поверхности направляющей 21 - индекс или нониус для шкалы углов поворота ϕz .
Цилиндрическая поверхность 27 щечки 23 с радиусом R1 и концентричный ей паз 26 с радиусом R2 выполнены из одного центра, находящегося на оси глухого отверстия 24 каретки 20, причем щечки 23 и отверстие 24 выполнены так, что ось цилиндрической поверхности 27 пересекается с осью колеса 16 и перпендикулярна ей.
На щечке 23 нанесена шкала 39 углов поворота ϕy держателя 22, а на каретке 20 - соответствующий ей индекс или нониус 40.
Для регулировки момента вращения маховиков 8 и 11 устройство содержит разрезные конические втулки 41 и 42, соответственно, и поджимающие их гайки 43 и 44.
На передней вертикальной поверхности основания 1 нанесена шкала 45 линейного перемещения вдоль оси 2 держателя 22. Шкала 46 линейного перемещения вдоль оси Y нанесена на передней вертикальной поверхности корпуса 4, там же нанесен индекс или нониус для шкалы 45. На передней торцевой поверхности втулки 17 закреплена круговая шкала 47 углов поворотов ϕx держателя 22. На передней поверхности оправы 14 нанесены индексы или нониусы для шкал 46 и 47. Шкала 48 линейного перемещения вдоль оси X держателя 22 закреплена на каретке 20.
Работа устройства осуществляется следующим образом.
Предварительно вращением гайки 43 устанавливают необходимый момент вращения маховика 8 с колесом 7, при котором корпус 4 не сползает вниз по направляющим 2 при установке на держатель 22 груза весом в 1 кг. Вращением гайки 44 устанавливают момент вращения полого вала 9, при котором вращение маховика 31 не вызывает вращения маховика 11. Устройство готово к работе.
Объект контроля устанавливают либо непосредственно, либо при помощи специального держателя, на держатель 22 и вращением маховика 8 перемещают держатель 22 до совмещения объекта контроля с плоскостью предметов объектива прибора, например микроскопа. При этом колесо 7 обкатывается по зубьям рейки 3 и перемещает корпус 4 вместе с держателем 22 по направляющим 2 основания 1 вдоль оси координат Z. Вращением маховика 13 перемещают держатель 22 в горизонтальной плоскости до совмещения нужного фрагмента объекта с центром поля зрения микроскопа. При этом вращение от вала 12 через штифт 33 передается колесу 32, которое, обкатываясь по рейке 35, перемещает ее вместе с кареткой 20 и держателем 22 по прямоугольному отверстию 19 втулки 17 вдоль координаты X. Вращением маховика 31 перемещают держатель 22 в горизонтальной плоскости до совмещения исследуемого фрагмента с центром поля зрения микроскопа по другой координате. При этом вращение ходового винта 30 перемещает вдоль оси полого вала 9 гайку 28, которая через винт 29, проходящий через направляющий паз 10, перемещает червяк 15 вместе с оправой 14 и держателем 22 по валам 9 и 12 вдоль оси Y. Вращением маховика 11 ориентируют в поле зрения микроскопа наклонную поверхность исследуемого объекта. При этом вращение полого вала 9 через винт 29 передается червяку 15, который поворачивает косозубое или червячное колесо 16 вместе со втулкой 17, кареткой 20 и держателем 22 на угол ϕx вокруг оси X. Причем при повороте каретки 20 зубья рейки 35 скользят по зубьям колеса 32, не выходя из зацепления и не вызывая дополнительного перемещения держателя 22. Вращением маховика, соединенного с трубкой 36, ориентируют объект в горизонтальной плоскости относительно центра поля зрения микроскопа. При этом вращение от трубки 36 передается кольцу 37 и держатель 22 поворачивается на направляющей 21 на угол ϕz вокруг оси Z. Затем ослабляют направляющий винт 25 и наклоном направляющей 21 ориентируют исследуемый фрагмент объекта в поле зрения микроскопа, винт 25 заворачивают. При этом сегментная щечка 23 цилиндрической поверхностью 27 скользит по цилиндрической поверхности глухого отверстия 24 каретки 20 и поворачивает держатель 22 на угол ϕy вокруг оси Y.
При необходимости дополнительно ориентируют объект по любой координате вышеуказанным образом.
По шкалам 48, 46, 45, 47, 39 и 45 и соответствующим им индексам или нониусам определяют координаты x, y, z и углы ϕx, ϕy, ϕz, , однозначно характеризующие положение объекта относительно центра поля зрения микроскопа.
Источники информации.
1. Скворцов Г. Е. и др. Микроскопы. Л.: Машиностроение, 1969, с. 397 - 399, рис. XYI.2.
2. Скворцов Г. Е. и др. Микроскопы. Л.: Машиностроение, 1969, с. 268, 288, 289, рис. IX.23 - прототип.
| название | год | авторы | номер документа |
|---|---|---|---|
| ПРИВОД ДЛЯ ИНСТРУМЕНТА ЭНДОСКОПИЧЕСКОГО ХИРУРГИЧЕСКОГО АППАРАТА | 2014 |
|
RU2570939C1 |
| УСТРОЙСТВО ДЛЯ ИСПОЛЬЗОВАНИЯ РУЧНОГО ОГНЕСТРЕЛЬНОГО ОРУЖИЯ ПРИ СТРЕЛЬБЕ ИЗ-ЗА УКРЫТИЯ | 2009 |
|
RU2399011C1 |
| ПРИКАТОЧНОЕ УСТРОЙСТВО К СТАНКУ ДЛЯ СБОРКИ ПОКРЫШЕК ПНЕВМАТИЧЕСКИХ ШИН | 1999 |
|
RU2172255C2 |
| ДВУХКЛЕТЕВОЙ БЛОК ТРЕХРОЛИКОВЫХ КЛЕТЕЙ | 1999 |
|
RU2177385C2 |
| ЭЛЕКТРОМОТОРНЫЙ ПРИВОД С РУЧНЫМ ДУБЛЕРОМ | 1996 |
|
RU2103582C1 |
| ПРИВОД КЛАПАНА КРАНОВОГО ТИПА И РУЧНОЙ ДУБЛЕР ПРИВОДА | 2000 |
|
RU2179681C2 |
| ЛЮНЕТ | 2000 |
|
RU2179916C2 |
| ЛЕТУЧАЯ ПИЛА ДЛЯ РЕЗКИ ДВИЖУЩЕГОСЯ ПРОКАТА | 2003 |
|
RU2240898C1 |
| ГИДРОСИСТЕМА СИНХРОНИЗАЦИИ ДВУХ СЕРВОМЕХАНИЗМОВ | 2000 |
|
RU2192567C2 |
| Рулевой привод | 2024 |
|
RU2826230C1 |



Изобретение относится к точному приборостроению и может быть использовано в контрольно-измерительной технике, в частности в микроскопах сравнения и стереоскопических микроскопах. Задачей изобретения является разработка устройства, обеспечивающего шесть степеней свободы для держателя объекта с возможностью определения величины линейного и углового перемещения по всем направлениям. Устройство содержит основание 1, корпус 4, установленный с возможностью вертикального перемещения в основании 1, в корпусе 4 установлена оправа 14 с возможностью перемещения по полому валу(ПВ) 9 и параллельному ему валу 12. В оправе 14 коаксиально ПВ 9 и коаксиально валу 12 установлены с возможностью вращения соответственно червяк 15 и зубчатое колесо (ЗК) 32. В оправе 14 с возможностью вращения установлено косозубое колесо 16 со втулкой 17, кинематически связанное с червяком 15. Во втулке 17 с возможностью перемещения установлена каретка 20 с рейкой 35, выполненной в сечении в виде полукруга и кинематически связанной с ЗК 32. Держатель 22 объекта установлен на направляющей 21 вращения вокруг вертикальной оси, на которой закреплены сегментные щечки 23, цилиндрические поверхности которых образуют подшипник скольжения совместно с глухими отверстиями каретки 20, ось вращения которого параллельна оси ПВ 9. Внутри ПВ 9 установлен винтовой привод, гайка которого через продольный паз ПВ 9 соединена с червяком 15. 3 з. п. ф-лы, 6 ил.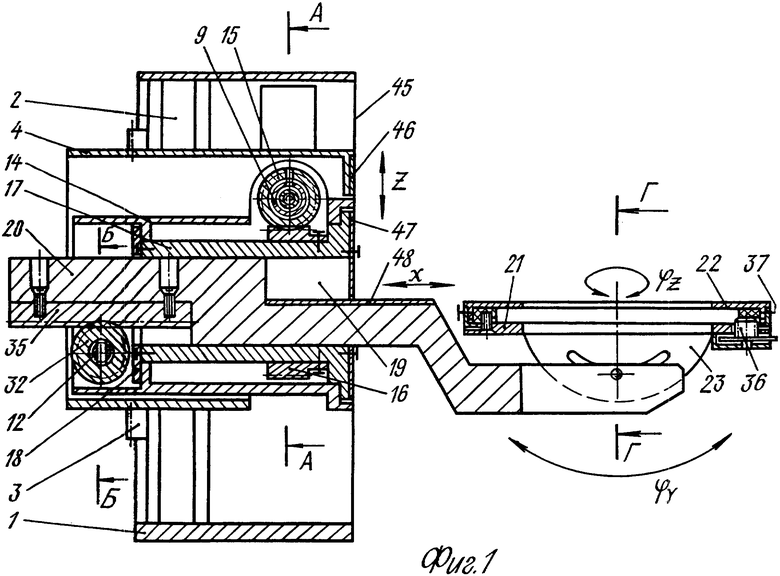
| Скворцов Г.Е | |||
| и др | |||
| Микроскопы | |||
| - Л.: Машиностроение, 1969, с.288 - 289, рис.IX.23. |
