Изобретение относится к сельскохозяйственному машиностроению, в частности к транспортным средствам для перевозки сельскохозяйственных грузов в контейнерах.
Известен прицеп для перевозки контейнеров, содержащий механизм подъема типа "Нюрнбергские ножницы" в виде П-образных рамы и рычагов с ходовыми колесами, связанных гидроцилиндром [1].
Недостатками прицепа являются невозможность выполнения перегрузки груза из контейнера в другие транспортные средства и погрузочно-разгрузочных работ с контейнерами и штучными грузами.
Известно транспортное средство для перевозки контейнеров, принятое за ближайший аналог. Оно содержит П-образную раму, ходовые колеса, подъемные рычаги, шарнирно закрепленные на раме и связанные между собой жесткой балкой в месте закрепления, гидроцилиндры подъема двухстороннего действия, установленные между рамой и рычагом, поворотные балки, на которых одними концами шарнирно закреплены гидроцилиндры опрокидывания [2].
Транспортное средство может осуществлять забор, перевозку и выгрузку или перегрузку груза из контейнера на грунт или в другое транспортное средство.
Недостатками транспортного средства являются низкие эксплуатационные характеристики и возможности, а именно недостаточная высота перегрузки груза и невозможность выполнения погрузочно-разгрузочных работ с контейнерами и штучными грузами.
Техническим результатом изобретения является улучшение эксплуатационных возможностей.
Для достижения технического результата в контейнеровозе, содержащем П-образную раму, ходовые колеса, подъемные рычаги, шарнирно закрепленные на раме и связанные между собой жесткой балкой в месте закрепления, гидроцилиндры подъема двухстороннего действия, установленные между рамой и рычагами, поворотные балки, на которых одними концами шарнирно закреплены гидроцилиндры опрокидывания, подъемные рычаги выполнены двуплечими, на больших плечах которых смонтированы ходовые колеса, а поворотные балки шарнирно установлены на концах рамы и жестко связаны поперечиной, на которой закреплен захватный орган, при этом вторые концы гидроцилиндров опрокидывания шарнирно связаны двумя парами штанг с рамой и малыми плечами подъемных рычагов. Кроме того, гидроцилиндры опрокидывания выполнены двухстороннего действия.
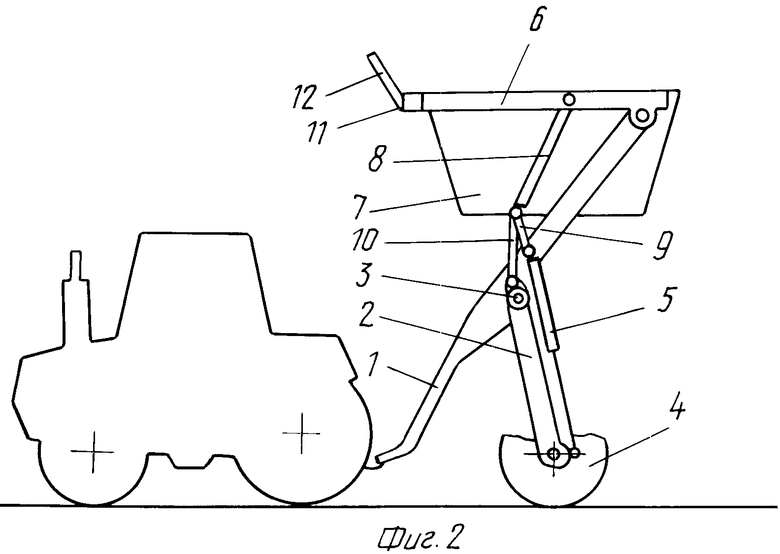
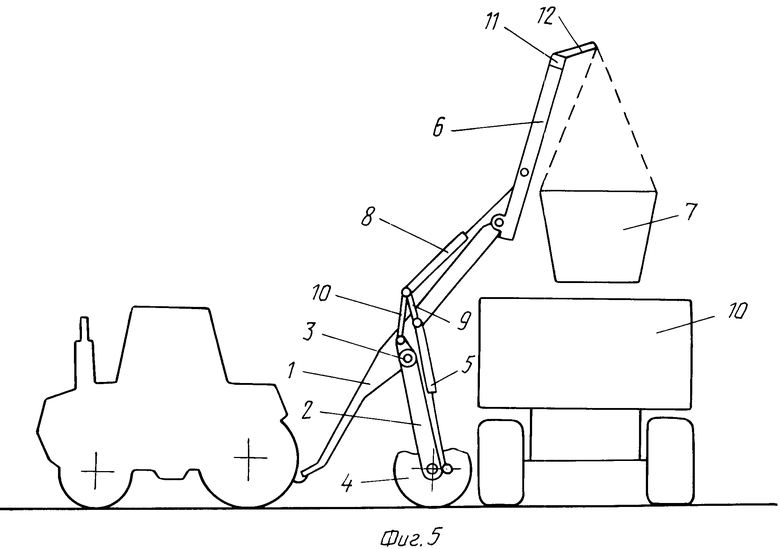
На фиг. 1 изображен контейнеровоз с контейнером в транспортном положении; на фиг. 2 - то же, в верхнем поднятом положении; на фиг. 3 - то же, в положении перегрузки груза в транспортное средство; на фиг. 4 - то же, в положении строповки контейнера; на фиг. 5 - то же, в положении погрузки контейнера на транспортное средство.
Контейнеровоз состоит из П-образной в плане рамы 1 (фиг. 1-3), на которой шарнирно закреплены двуплечие подъемные рычаги 2, связанные между собой в месте закрепления балкой 3. На больших плечах рычагов 2 смонтированы ходовые колеса 4.
Между рамой 1 и рычагами 2 установлены гидроцилиндры подъема 5 двухстороннего действия. На концах рамы 1 шарнирно установлены поворотные балки 6 для контейнера 7. На балках 6 одними концами закреплены гидроцилиндры опрокидывания 8 двухстороннего действия. Вторые концы гидроцилиндров 8 шарнирно связаны парой штанг 9 с рамой 1 и парой штанг 10 с малыми плечами рычагов 2. Концы балок 6 жестко связаны между собой поперечиной 11 с захватным органом 12.
В процессе эксплуатации контейнеровоз может выполнять такие работы, как забор (снятие) контейнера, перевозку и выгрузку груза из него на грунт или в другое транспортное средство, погрузочно-разгрузочные работы с контейнерами и штучными грузами.
Вертикальное перемещение балок 6 с контейнером 7 производят выдвижением или втягиванием штоков гидроцилиндров 5 подъема, штоки гидроцилиндров 8 опрокидывания при этом находятся во втянутом положении.
Для перевода контейнера 7 из транспортного положения (фиг. 1) в положение перегрузки груза выдвигают штоки гидроцилиндров 5. При этом рычаги 2 (фиг. 2) поворачиваются относительно рамы 1 по часовой стрелке, колеса 4 подкатываются к трактору, а рама 1 поворачивается относительно прицепной петли трактора против часовой стрелки. Малые плечи рычагов 2 перемещают штанги 10, 9 и гидроцилиндры 8, которые удерживают балки 6 и контейнер 7 в горизонтальном положении. Для перегрузки груза из контейнера 7 (фиг. 3) в транспортное средство выдвигают штоки гидроцилиндров 8 и наклоняют контейнер 7. Перевод контейнера в транспортное положение осуществляют в обратной последовательности.
Для выполнения погрузочно-разгрузочных работ с контейнерами (штучными грузами) балки 6, выдвижением штоков гидроцилиндров 8 (фиг. 4), поворачивают по часовой стрелке. При этом штоки гидроцилиндров 5 находятся во втянутом положении, рама 1 - в нижнем положении. Затем производят строповку контейнера 7 к захватному органу 12.
Выдвижением штоков гидроцилиндров 5 поднимают контейнер 7 (фиг. 5) на высоту, необходимую для его погрузки. Маневрированием контейнеровоза размещают контейнер 7 над транспортным средством и опускают его. Разгрузку контейнеров с транспортного средства осуществляют в обратной последовательности.
Контейнеровоз позволяет за счет возможности углового перемещения рамы относительно прицепной петли трактора-тягача значительно повысить высоту перегрузки груза из контейнера, выполнять погрузочно-разгрузочные работы с контейнерами и штучными грузами.
Техническое решение не оказывает отрицательного влияния на окружающую среду.
| название | год | авторы | номер документа |
|---|---|---|---|
| КОНТЕЙНЕРОВОЗ | 1991 |
|
RU2022832C1 |
| ТРАНСПОРТНОЕ СРЕДСТВО С ГРУЗОПОДЪЕМНЫМ УСТРОЙСТВОМ | 1992 |
|
RU2067935C1 |
| ПОГРУЗОЧНО-ТРАНСПОРТНЫЙ АГРЕГАТ | 1997 |
|
RU2147532C1 |
| Контейнеровоз | 1990 |
|
SU1743942A2 |
| Контейнеровоз | 1988 |
|
SU1556958A1 |
| АВТОПОЕЗД | 1997 |
|
RU2131369C1 |
| Транспортное средство | 1984 |
|
SU1152821A1 |
| Контейнеровоз | 1984 |
|
SU1220960A2 |
| Контейнеровоз | 1984 |
|
SU1194725A1 |
| Контейнеровоз | 1986 |
|
SU1418121A1 |


Использование: изобретение относится к сельскохозяйственному машиностроению, в частности к транспортным средствам для перевозки сельскохозяйственных грузов в контейнерах. Сущность изобретения: контейнеровоз содержит П-образную раму, подъемные рычаги выполнены двуплечими, на больших плечах которых смонтированы ходовые колеса. Подъемные рычаги шарнирно закреплены на раме и связаны между собой жесткой балкой в месте закрепления. Гидроцилиндры подъема двухстороннего действия установлены между рамой и рычагами. Поворотные балки шарнирно установлены на концах рамы и жестко связаны поперечиной, на которой закреплен захватный орган. На поворотных балках одними концами шарнирно закреплены гидроцилиндры опрокидывания, вторые концы которых шарнирно связаны двумя парами штанг с рамой и с малыми плечами подъемных рычагов. 1 з.п.ф-лы, 5 ил.
