Изобретение относится к сельскохозяйственному машиностроению, в частности к подъемно-транспортному оборудованию, используемому для погрузки, перегрузки и перевозки различных грузов.
Цель изобретения - повышение надежности контейнеровоза.
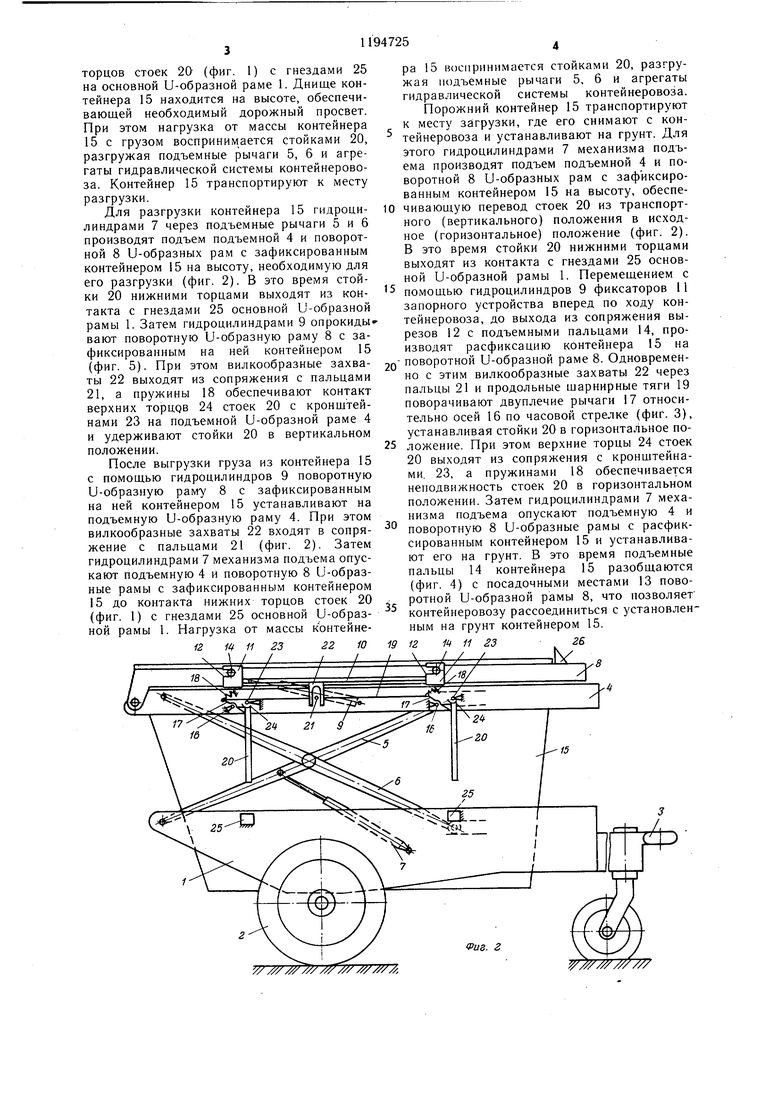
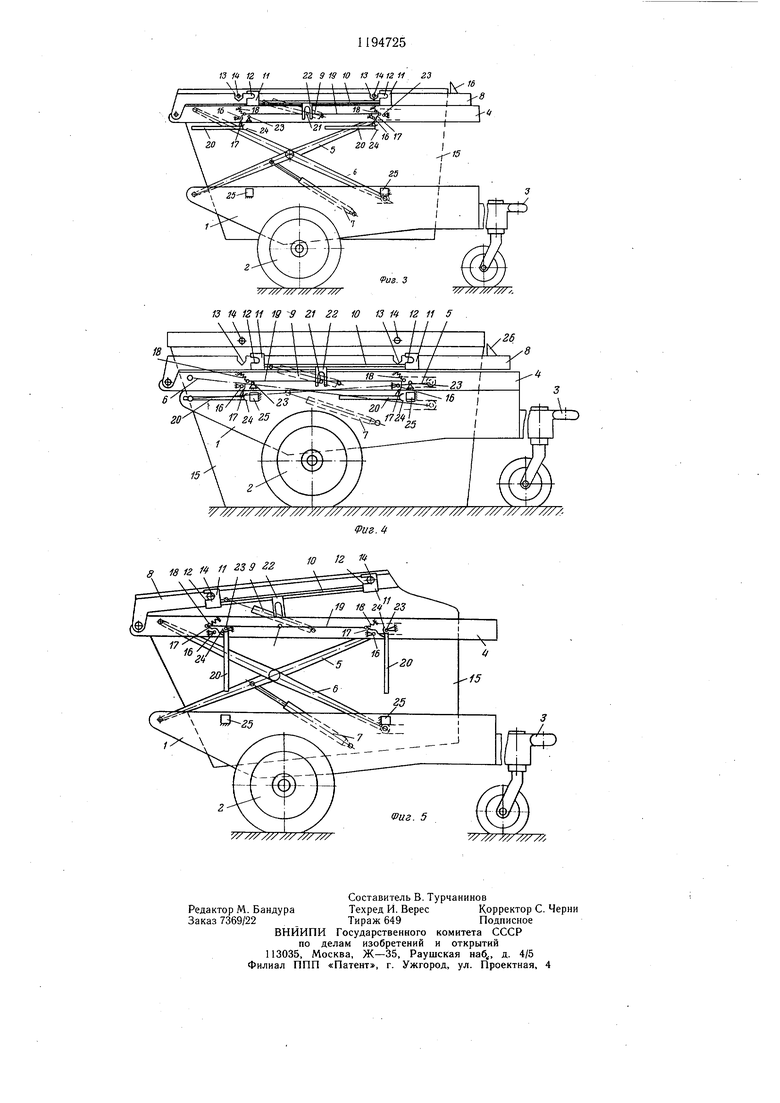
На фиг. 1 изображен контейнеровоз с зафиксированным контейнером в транспортном положении, вид сбоку; на фиг. 2 - то же, с зафиксированным контейнером и при поднятых подъемной и поворотной U-образных рамах, вид сбоку; на фиг. 3 - то , же, с расфиксированным контейнером на поворотной и-образ ой раме перед установкой его на грунт (или после соединения контейнеровоза с контейнероми перед фиксацией noc;uMKero), вид сбоку; на фиг. 4 - то же, поело установки контейнера на грунт (и;1:ч пепе.л соелчяеиием контейнеровоза с контеЙ1;|.р,М; iui.n сбоку); на фиг. 5 - то же. в момент ныгрузки груза из контейнера, вид сбоку.
Контейнеровоз содержи основную U-образную раму 1 . смл-ч ы п1 колесами 2 и спицей 3. Сверх} ;ы I.-образной раме 1 расположена подъем1;;1я lj-образная рама 4, соединенная с nefi механизмом подъема, состоящим из подъемных рычагов 5, 6 и гидроцилиндров 7. Подъемные рычаги 5, 6 шлрнирно соединены между собой и кинематически связаны нижними и верхними концами с основной 1 и подъемной 4 U-образными рамами. Подъемные рычаги 5 также шарнирно связаны с основной U-образной рамой 1 через гидроцилиндры 7. Связь подъемн1 1х рычагов 5 и 6 с основной 1 и подъемной 4 U-лбразными рамами выполнена в виде кинематически связанных пар, обеспечиваюши.х вращательное и поступательное перемещения. На подъемной U-образной раме 4 шарнирно установлен механизм опрокидывания, состоящий из поворотной U-образной рамы 8 и гидроцилиндров 9, кинематически связывающих подъемную 4 и поворотную 8 U-образные рамы. Поворотная U-образная рама 8 снабжена запорным устройством, состоящим из соединенных тягами 10 фиксаторов 11 с вырезами 12, охватывающих лонжероны поворотной U-образной рамы 8. Тяги 10 через гидроцилиндры 9 кинематически связаны с подъемной U-образной рамой 4. В поворотной U-образной раме 8 выполнены посадочные места в виде вырезов 13 под подъемные пальцы 14 контейнера 15.
На лонжеронах подъемной U-образной рамы 4 с обеих сторон щарнирно закреплены на осях 16 по два двуплечих рычага 17, одни плечи которых снабжены пружинами 18 и связаны между собой продольными шарнирными тягами 19, а на других - закреплены стойки 20.
Продольные тяги 19 снабжены пальцами 21, взаимодействующими с вилкообразными
захватами 22, неподвижно установленными на тягах 10, соединяющих фиксаторы 11 запорного устройства. Против каждого двуплечего рычага 17 на подъемной U-образной раме 4 закреплены кронштейны 23, взаимодействующие с верхними торцами 24 стоек 20, а на основной U-образной раме 1 - гнезда 25, расположенные в вертикальной плоскости. На поворотной U-образной раме 8 установлены ограничители 26.
0 В процессе эксплуатации контейнеровоза осуществляются следующие операции: соединение контейнеровоза с груженым контейнером; транспортировка контейнера; разгрузка груза из контейнера; установка контейнера на грунт.
Соединение контейнеровоза с контейнером осуществляется следующим образом. Контейнеровоз задним ходом подают к установленному на грунте груженому контейнеру 15 (фиг. 4) таким образом, что он
0 охватывает основной 1, подъемной 4 и поворотной 8 U-образными рамами контейнер 5. При этом подъемная 4 и поворотная 8 U-образные рамы опираются на основную U-образную раму 1. Гидроцилиндры 7 и 9 находятся во втянутом положении, посадочные места 13 освобождены от фиксаторов 11. Пружины 18 удерживают стойки 20 в горизонтальном положении, а пальцы 21 сопряжёны с вилкообразными захватами 22. Контейнеровоз перемещают назад до конQ такта контейнера 15 с ограничителями 26. При этом обеспечивается положение подъемных пальцев 14 над посадочными местами 13 поворотной U-образной рамы 8. Затем гидроцилиндрами 7 механизма подъема производят подъем подъемной 4 и поворотной
8 U-образных рам, захватывая посадочными местами 13 подъемные пальцы 14 И поднимая контейнер 15. Подъем контейнера 15 осуществляется на высоту, обеспечивающую перевод стоек 20 в транспортное (вертикальное) положение (фиг. 3).
0 Перемещением с помощью гидроцилиндров 9 фиксаторов 11 запорного устройства, до сопряжения вырезов 12 с подъемными пальцами 14, производят закрепление контейнера 15 на поворотной U-образной раме 8
j (фиг. 2). Одновременно с этим вилкообразные захваты 22 через пальцы 21 и продольные шарнирные тяги 19 поворачивают двуплечие рычаги 17 относительно осей 16 против часовой стрелки, устанавливая стойки 20 в вертикальное положение. При
0 этом с помощью пружин 18 обеспечивается контакт верхних торцоо 24 стоек 20 с кронштейнами 23 и исключается перемещение стоек 20 в пределах зазоров в соединениях двуплечих рычагов 17 и продольных шарнирных тяг 19.
5 Затем гидроцилиндрами 7 механизма подъема опускают подъемную 4 и поворотную 8 U-образные рамы с зафиксированным контейнером 15 до контакта нижних
торцов стоек 20 (фиг. 1) с гнездами 25 на основной U-образной раме 1. Днище контейнера 15 находится на высоте, обеспечивающей необходимый дорожный просвет. При этом нагрузка от массы контейнера 15 с грузом воспринимается стойками 20, разгружая подъемные рычаги 5, 6 и агрегаты гидравлической системы контейнеровоза. Контейнер 15 транспортируют к месту разгрузки.
Для разгрузки контейнера 15 гидроцилиндрами 7 через пОлТьемные рычаги 5 и 6 производят подъем подъемной 4 и поворотной 8 U-образных рам с зафиксированным контейнером 15 на высоту, необходимую для его разгрузки (фиг. 2). В это время стойки 20 нижними торцами выходят из контакта с гнездами 25 основной U-образной рамы 1. Затем гидроцилиндрами 9 опрокиды вают поворотную U-образную раму 8 с зафиксированным на ней контейнером 15 (фиг. 5). При этом вилкообразные захваты 22 выходят из сопряжения с пальцами 21, а пружины 18 обеспечивают контакт верхних торцдв 24 стоек 20 с кронштейнами 23 на подъемной U-образной раме 4 и удерживают стойки 20 в вертикальном положении.
После выгрузки груза из контейнера 15 с помощью гидроцилиндров 9 поворотную U-образную раму 8 с зафиксированным на ней контейнером 15 устанавливают на подъемную U-образную раму 4. При этом вилкообразные захваты 22 входят в сопряжение с пальцами 21 (фиг. 2). Затем гидроцилиндрами 7 механизма подъема опускают подъемную 4 и поворотную 8 U-образные рамы с зафиксированным контейнером 15 до контакта нижних торцов стоек 20 (фиг. 1) с гнездами 25 основной U-образной рамы 1. Нагрузка от массы контейнера 15 воспринимается стойками 20, разгружая подъемные рычаги 5, 6 и агрегаты гидравлической системы контейнеровоза. Порожний контейнер 15 транспортируют к месту загрузки, где его снимают с контейнеровоза и устанавливают на грунт. Для этого гидроцилиндрами 7 механизма подъема производят подъем подъемной 4 и поворотной 8 U-образных рам с зафиксированным контейнером 15 на высоту, обеспечивающую перевод стоек 20 из транспортного (вертикального) положения в исходное (горизонтальное) положение (фиг. 2). В это время стойки 20 нижними торцами выходят из контакта с гнездами 25 основной U-образной рамы 1. Перемещением с
помощью гидроцилиндров 9 фиксаторов II запорного устройства вперед по ходу контейнеровоза, до выхода из сопряжения вырезов 12 с подъемными пальцами 14, производят расфиксацию контейнера 15 на
0- поворотной U-образной раме 8. Одновременно с этим вилкообразные захваты 22 через пальцы 21 и продольные щарнирные тяги 19 поворачивают двуплечие рычаги 17 относительно осей 16 по часовой стрелке (фиг. 3), устанавливая стойки 20 в горизонтальное положение. При этом верхние торцы 24 стоек 20 выходят из сопряжения с кронштейнами. 23, а пружинами 18 обеспечивается неподвижность стоек 20 в горизонтальном положении. Затем гидроцилиндрами 7 механизма подъема опускают подъемную 4 и
° поворотную 8 U-образные рамы с расфиксированным контейнером 15 и устанавливают его на грунт. В это время подъемные пальцы 14 контейнера 15 разобщаются (фиг. 4) с посадочными местами 13 поворотной U-образной рамы 8, что позволяет контейнеровозу рассоединиться с установленным на грунт контейнером 15.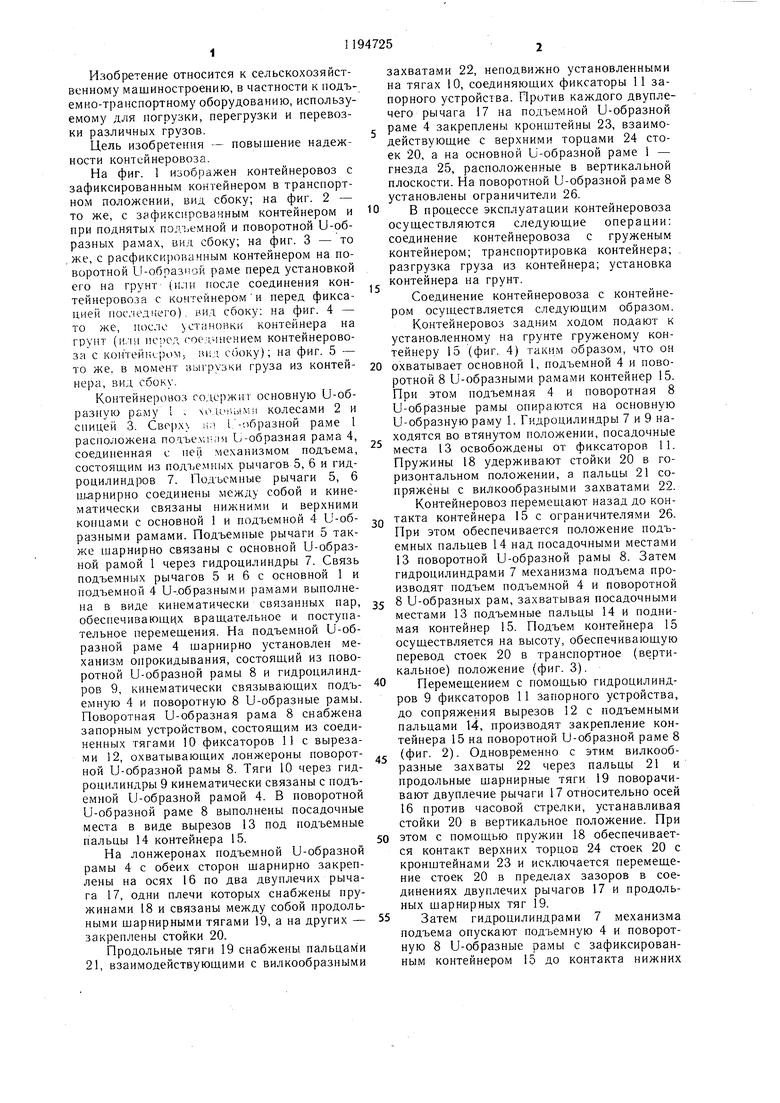
| название | год | авторы | номер документа |
|---|---|---|---|
| Транспортное средство | 1984 |
|
SU1152821A1 |
| Контейнеровоз | 1986 |
|
SU1418121A1 |
| Контейнеровоз | 1980 |
|
SU921903A2 |
| Транспортное средство | 1985 |
|
SU1320095A1 |
| Контейнеровоз | 1981 |
|
SU992261A2 |
| Контейнеровоз | 1978 |
|
SU691316A1 |
| Контейнеровоз | 1987 |
|
SU1507611A2 |
| Полуприцеп-контейнеровоз | 1989 |
|
SU1782807A1 |
| Контейнеровоз | 1980 |
|
SU921901A1 |
| КОНТЕЙНЕРОВОЗ | 1991 |
|
RU2022832C1 |
КОНТЕЙНЕРОВОЗ, содержащий основную U-образную раму с установленным .на ней подъемным механизмом, связанным с подъемной U-образной рамой, на которой шарнирно закреплена новоротная в 12 1 11 23 21 22 9 19 Ю 1Z /« // / / I / / тт / 18/, ///77/////////, вертикальной плоскости рама, имеющая посадочные места под пальцы контейнера и фиксаторы запорного устройства для закрепления контейнера, связанные продольными тягами, отличающийся тем, что, с целью повышения надежности, он снабжен щарнирно закрепленными на указанной подъемной раме подпружиненными стойками, попарно связанными дополнитетьными продольными щарнирными тягами, имеющими пальцы, вилкообразными захватами, установленными на продольных тягах запорного устройства и взаимодействующими с пальцами на дополнительных продольных тягах, закрепленными на основной U-образной раме гнездами для размещения в них нижних концов подпружиненных стоек, и установленными на а $ подъемной U-образной раме упорами для взаимодействия с верхними торцами подпру(Л жиненных стоек. 26 в .18 У//////////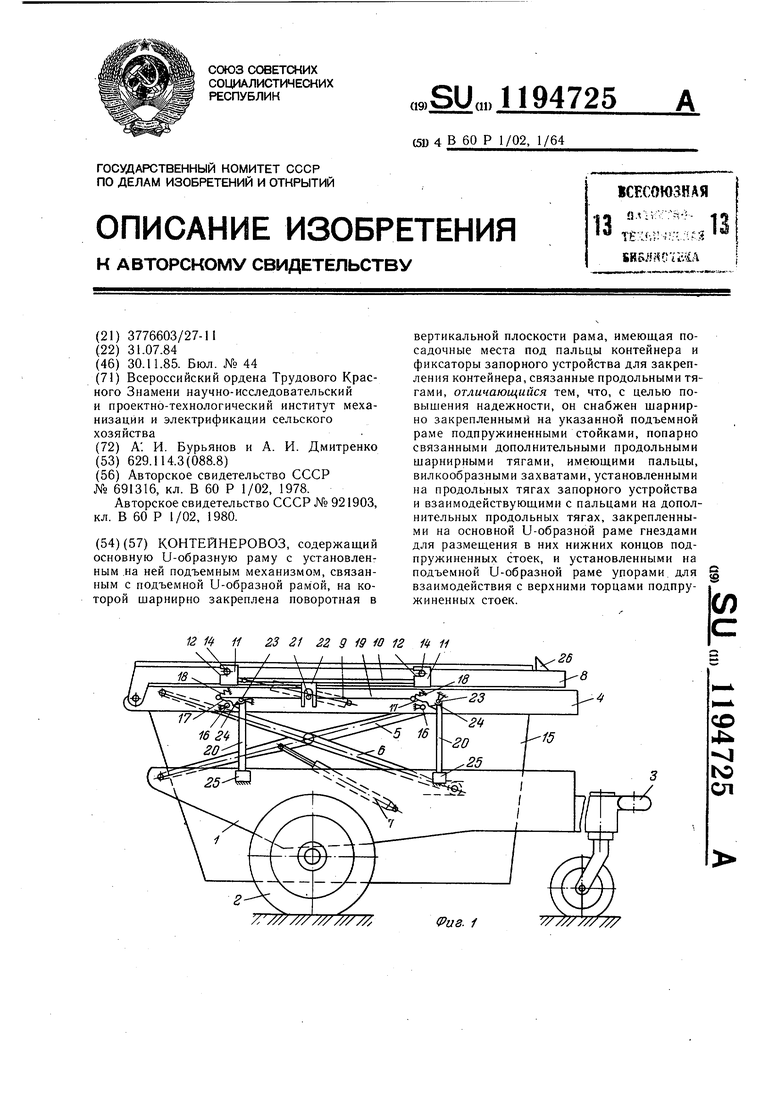
| Контейнеровоз | 1978 |
|
SU691316A1 |
| Способ получения молочной кислоты | 1922 |
|
SU60A1 |
| Контейнеровоз | 1980 |
|
SU921903A2 |
| Способ получения молочной кислоты | 1922 |
|
SU60A1 |
